BDS-3與GPS及其系統組合定位精度分析
2022-03-13 08:22:20孫洪瑞葛金龍鈕建定吳衛平
港工技術 2022年1期
關鍵詞:系統
孫洪瑞,葛金龍,鈕建定,吳衛平
(中交第三航務工程勘察設計院有限公司,上海,200032)
引言
北斗全球衛星導航系統(BeiDou Navigation Satellite System,簡稱BDS)是中國獨立設計并自主建設的全球衛星導航系統。BDS 的建設分為三個階段(參見圖1),2000 年年底建成北斗一號衛星導航系統(BDS-1),主要為中國及周邊區域用戶提供服務;2012 年年底建成北斗二號衛星導航系統(BDS-2),主要為亞太地區用戶提供服務;2017 年11 月開始發射BDS-3 衛星,至2020 年6 月底建成北斗三號衛星導航系統(BDS-3),面向全球用戶提供高精度的導航定位和授時(PNT)服務[1]。
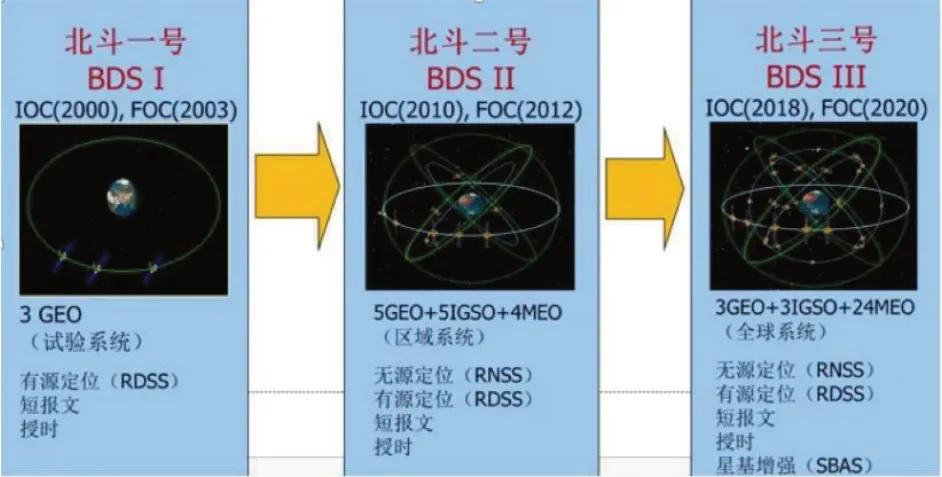
圖1 北斗衛星導航系統發展歷程
當前,眾多國內外專家學者及科研機構對北斗系統進行了大量的研究和分析,文獻[2-3]通過國際GNSS 檢測評估系統(iGMAS)觀測站的觀測數據,分別從數據完整率、信噪比、多路徑效應、電離層延遲和周跳五個方面對BDS-3 進行數據質量分析,說明了BDS-3 的觀測數據質量與GPS 精度相當,可以滿足北斗衛星導航系統全球定位服務的要求;文獻[4]基于動態船載數據,分析評估了BDS-3 在海洋區域的導航定位性能和數據質量特性,說明我國近海BDS 偽距定位精度優于遠海海域BDS 定位精度,遠海海域BDS 定位精度與GPS相當;文獻[5]基于兩個iGMAS 站數據量化分析了BDS-2 中3 個頻率的單頻定位精度;文獻[6]基于實測數據,論證了BDS-3 系統相對于BDS-2 系統定位精度提高明顯;文獻[7]基于三種不同的開源PPP解算軟件,對BDS、GPS 以及多系統組合的精密單位定位精度進行了分析,但文中分析的數據觀測時間為2019 年1 月之前,此時BDS-3 尚未完全建成。上述論文均是基于不完善的BDS-3 系統,針對全面建設后的BDS-3 系統研究甚少,本文將基于完整BDS-3 系統觀測數據,對系統的可見衛星數目、靜態PPP 定位的精度與收斂時間進行分析,并與GPS及其系統組合進行比較。
1 精密單點定位軟件簡介
本文將采用開源軟件MG-APP 對BDS-3 進行靜態觀測數據進行處理和精度分析。目前支持BDS-3 系統衛星數據PPP 解算的軟件只有少數,且開源的軟件只有幾種[7]。MG-APP 軟件是中國科學院研發,目前最新版本為2021年6月推出的V2.0.8,該軟件適用性非常好,可直接在Windows 7 以上的操作系統下運行,處理模式包括靜態和動態兩種。
2 數據處理與精度分析
2.1 數據來源
選取分布在全球的6 個MGEX 測站(POTS、SUTM、ULAB、URUM、WIND、WUH2)的10天觀測數據,觀測時段為2021 年6 月9 日至6 月18 日,數據采用間隔為30 秒。
2.2 可見衛星數分析
選取6 個站點在2021 年6 月9 日的單天觀測數據進行衛星可見數統計分析,為確保數據的可靠性和精度,高度截止角選擇7.5°,可見衛星均值見表1 所示。
由表1 可知,BDS-3 的可見衛星數量較GPS明顯增多,平均增幅在25 %以上,尤其在亞洲國家更加明顯,說明BDS-3 不僅已經實現全球覆蓋,而且衛星分布更加合理,利用率更高。
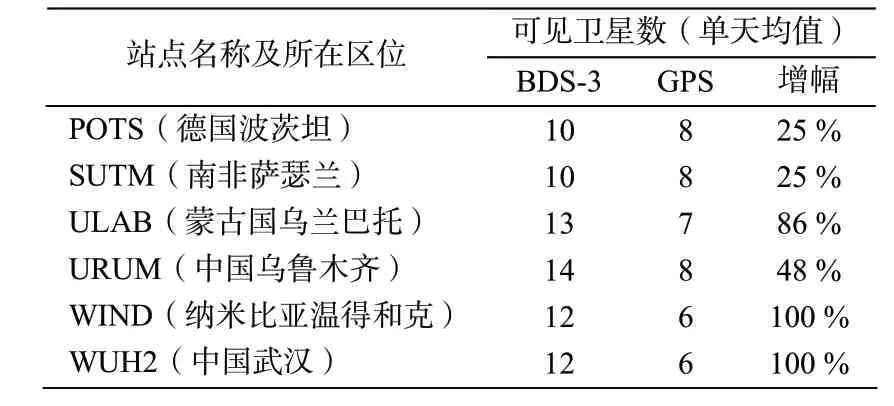
表1 測站可見衛星數統計表
選取其中3 個站點的全天可見衛星觀測數生成曲線圖,如圖2~圖4 所示。從3 幅圖可知,BDS-3可見衛星數目均多于GPS,僅少量時段接近相同;圖4 局部時間出現GPS 衛星跳零的情況,而BDS-3更加穩定。

圖2 德國POTS 站的可見衛星數量圖(單天)
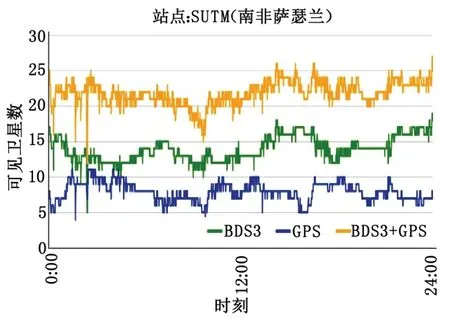
圖3 南非SUTM 站的可見衛星數量圖(單天)
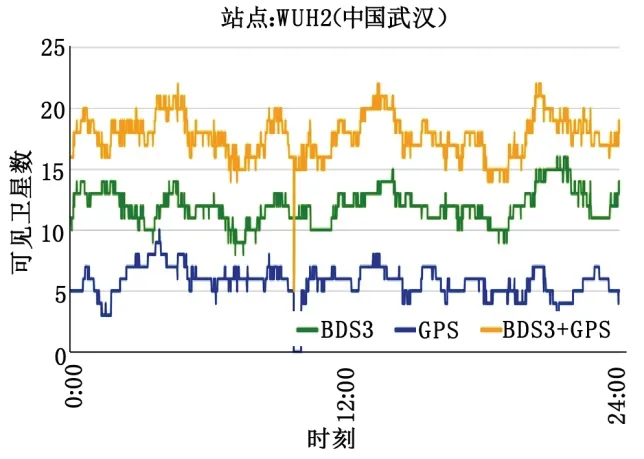
圖4 中國WUH2 的可見衛星數量圖(單天)
2.3 靜態PPP 精度分析
2.3.1 真值確定方法
鑒于BDS-3 可見衛星數明顯多于GPS,故BDS-3 定位的內符合精度好于GPS,本文不展開討論,本文僅分析靜態PPP 解算的外符合精度。為了更加準確可靠地評定BDS-3、GPS 及其組合的靜態精密單點定位(PPP)定位精度,需要選定某一參考值,作為各測站統計中誤差的真實的坐標真值。
由于 PPP 解算的坐標值為 WGS84(框架ITRF2008)瞬時歷元數值,故坐標真值的框架和參考歷元也需一致,目前主要有三種途徑獲取坐標真值。第一種方法是直接通過SOPAC 網站獲取各站點的WGS84 坐標真值[7],第二種方法是通過ITRF網站獲取[8],此方法需框架和歷元轉換;第三種方法是通過其他精密單點定位軟件解算[9],如加拿大在線服務軟件 CSRS-PPP,獲得的坐標也是ITRF2014 瞬時歷元數值。
本文主要采用SOPAC 網站的坐標值為真值,若前兩種方法均無法獲取測站坐標真值(如WUH2站)時,可采第三種方法的坐標值為真值。圖5 是除WUH2 站以外的其他5 個測站CSRS-PPP 軟件解算均值與SOPAC 網站獲取均值(10 天觀測數據)較差比較圖,在X、Y 和Z 三個方向的較差均小于1cm,精度在毫米級,均可作為參考真值。

圖5 各站XYZ 三個方向坐標較差比較圖
2.3.2 外符合精度分析
本文采用式(1)對BDS3、GPS 及其組合靜態單點定位結果在X、Y 和Z 三個方向的外符合精度進行評定。

式中,(x,y,z)為靜態PPP 單天解,(X,Y,Z)為坐標真值,σ為較差,RMS為均方根誤差。
三維點位中誤差如式(2)所示。

由圖6~圖9 可知,BDS-3 在X、Y 和Z 三個方向的PPP 定位外符合精度均在3.5 cm 以內,三維點位中誤差在5 cm 以內;BDS-3 較GPS 在三個方向的外符合精度有高有低,但總體點位中誤差較GPS 精度稍差;BDS-3 與GPS 組合定位點位中誤差在2.5~3.0 cm 之間,較單系統無明顯提高,但穩定性和可靠性更高。
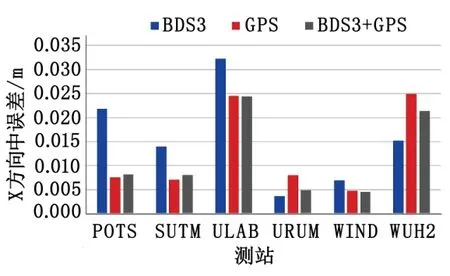
圖6 各測站X 方向PPP 定位中誤差

圖7 各測站Y 方向PPP 定位中誤差
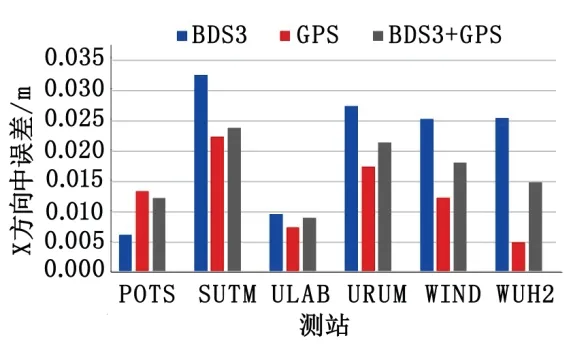
圖8 各測站Z 方向PPP 定位中誤差

圖9 各測站PPP 定位點位中誤差
2.4 收斂時間分析
本文以X、Y、Z 三個方向收斂至5 cm 的時間定義為收斂時間,分別對各個測站10 天內的內符合精度和外符合精度小于5 cm 時的收斂時間進行統計,在剔除個別站的某天較差觀測數據后,結果如表2 和表3 所示。
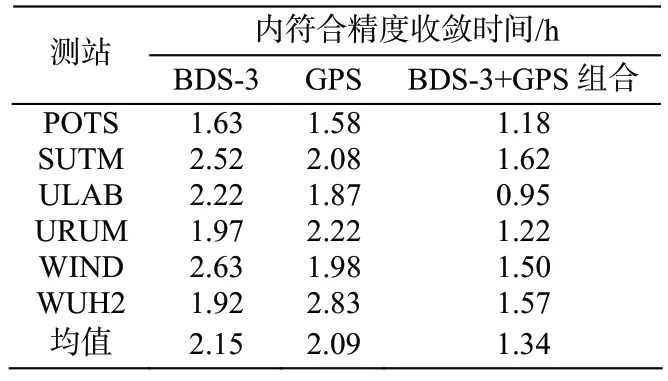
表2 測站內符合精度小于5 cm 時的收斂時間
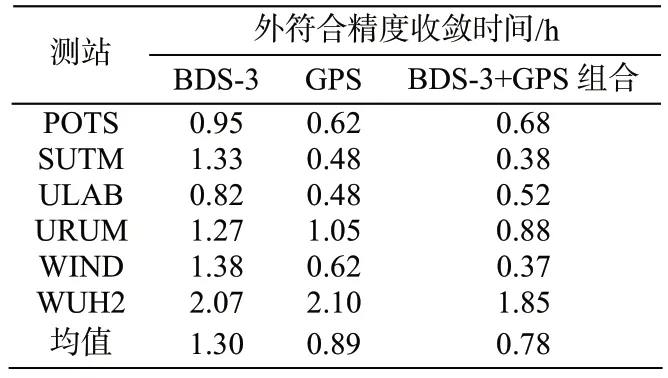
表3 測站外符合精度小于5 cm 時的收斂時間
由表2 可知,BDS-3 的內符合精度小于5 cm時的平均收斂時間為2.15 小時,與GPS 基本一致,但兩者組合解算時可以提高0.8 小時的平均收斂時間,速度明顯加快。由表3 可知,BDS-3 的外符合精度小于5 cm 時的平均收斂時間為1.3 小時,較GPS 慢約0.4 小時,但兩者組合解算的平均收斂時間可提高至0.78 小時。由表2 和表3 可知,采用BDS-3 和GPS 系統組合解算時,內外符合精度均可在2 小時內收斂至5 cm 內。
3 結語
本文通過對6 個MGEX 站的觀測數據進行處理,統計分析BDS-3 的可見衛星數量、靜態PPP定位時間和收斂時間,可得到如下結論和建議。
1)BDS-3 的可見衛星數均在10 顆以上,較GPS 明顯增加,兩者組合定位時,可大幅度提高衛星利用率。
2)BDS-3 系統的靜態PPP 定位精度與GPS 在同一量級,XYZ 三個方向的外符合精度(單天解)均在5 cm 內。
3)BDS-3 的靜態PPP 定位精度和收斂時間比GPS 稍差。
4)采用BDS-3 與GPS 系統組合定位對提高定位的精度有限,但可大幅提高收斂速度和可靠性,時長2 小時的靜態觀測數據可以達到5 cm 以內的定位精度。
5)BDS-3 與GPS 系統組合定位的精度受制于開源軟件MG-APP 的具體算法,接下來需研究如何提高BDS-3 或多系統組合定位精度的方法,并在工程實踐中加以應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
