高地隙施藥機噴桿自動調平系統設計與試驗
2022-03-14 07:57:16安家豪王亞林李加琪金誠謙
農業機械學報 2022年2期
印 祥 安家豪 王 顯 王亞林 李加琪 金誠謙,3
(1.山東理工大學農業工程與食品科學學院, 淄博 255049; 2.山東省旱作農業機械及信息化重點實驗室, 淄博 255049; 3.農業農村部南京農業機械化研究所, 南京 210014)
0 引言
高地隙施藥機以其作業噴幅寬、噴灑精量化、噴藥量均勻化等高效施藥作業優勢[1-4],越來越廣泛地應用在田間植保作業中。常用施藥機的噴幅為12 m(如雷沃ZP9500型),大型噴霧機的展幅有的甚至達42 m[2-6],由于高地隙施藥機的噴桿展幅長、撓性大[7],在田間作業時,因地表硬度底層高低不一,車身微小的顛簸會引起噴桿末端較大的起伏變化[7-10],不僅影響噴霧量分布均勻性,導致施藥質量下降,嚴重時噴桿末端還會觸碰地面或者作物冠層[11],造成噴桿、作物、機器的損傷;為保證作業質量和作業安全,噴霧機駕駛員在作業過程中要觀察噴桿與作物之間是否有接觸,手動對噴桿的傾斜角度進行調節,增加了駕駛員的勞動強度。因噴桿過長對作物及機器造成損傷,現對噴桿調節系統應用研究越來越多[12-15],因此,有必要實現噴霧機在田間植保作業過程對噴桿傾斜角度進行實時自動調節,使噴桿處于允許的傾斜角度范圍內,避免噴桿與作物的接觸,降低駕駛員的勞動強度。
為此,國內外研究人員基于非接觸式傳感器和傾角傳感器設計了調平控制系統。非接觸式傳感器包括激光測距儀、紅外傳感器和超聲波傳感器等,HERBST等[16]設計了基于激光測距儀的噴桿調節系統;SINFORT等[17]采用紅外發射器檢測噴桿姿態;OOMS等[18]采用多傳感器的組合實現噴桿姿態檢測;魏新華等[2]設計了基于超聲波傳感器和PLC控制系統的噴桿高度及平衡調控系統,可以將噴桿高度變化值控制在±3 cm范圍內;孫星等[19]采用超聲波傳感器和傾角傳感器,通過加權平均算法融合兩種傳感器信息,設計了基于專家控制的噴桿高度調節系統。在傾角傳感器方面,張盟等[20]采用高精度MEMS慣性傳感器測得噴桿姿態,設計了基于DSP處理器自動調平系統。
綜上所述,調平控制系統主要采用紅外傳感器、超聲波傳感器和傾角傳感器檢測噴桿傾角,紅外與超聲波傳感器通過測量噴桿兩端離地距離,推算其傾斜角度,但作業時噴桿自身柔性大兩端易發生形變,導致測量精度低,而傾角傳感器可以在動態環境下測得傾斜角度,并廣泛應用于小型無人機、智能農業裝備、汽車等領域,成本較低,測量精度高。本文針對上述問題,設計一種適用于高地隙施藥機的噴桿自動調平系統,使用低成本傾角傳感器通過信息融合實現噴桿水平傾角動態檢測,基于PID控制策略和機電液一體化技術,使噴桿始終保持水平。分析噴桿調平系統的工作原理,開展場地與田間測試試驗,驗證系統在田間作業時的準確性和穩定性。
1 高地隙施藥機噴桿自動調平系統結構

圖1 高地隙施藥機實物圖與噴桿自動調平機構結構圖Fig.1 High-clearance spraying machine and spray beam height gap automatic leveling mechanism1.行走控制機構 2.定位天線 3.噴霧作業部件 4.液壓閥組 5.噴桿調節機構 6.左段噴桿 7.左側伸展油缸 8.中段噴桿 9.調平油缸 10.調平控制器 11.中段噴桿支架 12.橫梁 13.升降油缸 14.噴桿升降機構
高地隙施藥機噴桿自動調平系統以山東華盛中天機械集團股份有限公司生產的3WP-500G型三段式噴桿噴霧機為研發平臺,由噴桿調節機構、傾角傳感器、調平控制器、液壓閥組組成,如圖1所示。噴桿噴霧機性能參數如表1所示。噴桿調節機構主要包括升降機構和三段式噴桿支架。升降機構由平行四桿機構和橫梁組成,噴桿升降是經過電磁換向閥控制液壓油缸伸縮,帶動平行四桿機構來實現。三段式噴桿支架采用折疊式結構,噴桿通過管夾與噴桿支架連接,兩側伸展油缸用于控制噴桿支架的展開折疊;中段噴桿支架的上端和橫梁鉸接,噴桿支架通過調平油缸的伸縮實現相對于鉸接點的左右擺動,從而調節噴桿在橫滾平面上的角度。傾角傳感器水平安裝在噴桿支架上,實時測量噴桿的傾斜角度。

表1 華盛3WP-500G型噴桿噴霧機技術參數Tab.1 Main technical index of Huasheng 3WP-500G sprayer

圖3 噴桿調平機構簡圖Fig.3 Schematics of leveling mechanism1.噴桿支架 2.傾角傳感器 3.調平油缸
調平控制器以PIC18F258處理器為核心,采用維特智能公司生產的JY61P型傾角傳感器。液壓閥組中液壓油缸為雙作用單杠活塞式工程液壓缸,采用滑閥機能為M型結構的三位四通電磁閥,控制液壓缸的啟停以及運動方向的改變。調平控制器通過串口與傾角傳感器進行數據傳輸,獲取噴桿姿態信息、運行數據處理和控制算法,并向液壓閥組發送指令數據。
噴桿自動調平系統原理框圖如圖2所示。施藥機田間作業時,噴桿支架與水平面夾角發生變化,傾角傳感器測得噴桿支架傾角傳輸給調平控制器,控制器對采集的角度信號進行濾波處理,削弱測量噪聲影響,并基于PID算法對電磁換向閥發送控制信號,驅動調平油缸伸縮調整噴桿支架達到預設角度,實現噴桿自動調平。

圖2 噴桿自動調平系統原理框圖Fig.2 Block diagram of automatic spray beam leveling control system
2 調平機構設計
噴桿的運動分為施藥機的牽引動作和相對于機身的轉動動作。不考慮施藥機前進方向的牽引運動,可以把噴桿相對于機身的轉動運動看作為平面轉動。噴桿與施藥機相對運動示意圖如圖3所示,在施藥機Oaxayaza坐標系中,xa正方向為機器前進方向,Oa為噴桿支架與橫梁的上固定點,ca、da分別為油缸與橫梁上下支撐點,噴桿調平部分可以簡化為噴桿橫滾傳感平面和轉動機構,施藥機橫滾傳感平面平行于施藥機四輪平面,傾角傳感器安裝在中段噴桿支架上,傾角傳感器坐標系與施藥機坐標系方向相同,測得噴桿傾斜角(即橫滾角度)如圖3所示,高地隙施藥機噴桿向右傾斜時測量到噴桿傾角為負,向左側傾斜時為正。噴桿支架及相關機構可簡化為支架、轉動鉸接點與油缸連接點。
噴桿支架在液壓油缸驅動下帶動噴桿繞鉸接點相對于施藥機轉動,形成噴桿相對于施藥機的傾角β,如圖3所示,噴桿相對于施藥機傾角β逆時針方向轉動的角度為負,順時針方向轉動的角度為正。
如圖3所示,當噴桿相對于施藥機處于水平狀態時,噴桿支架與橫梁的夾角為
(1)
式中θ——caOa與Oada的夾角,(°)
la——caOa的長度,mm
lb——Oada的長度,mm
l——噴桿水平時油缸初始長度,mm
以橫梁為基準,噴桿處于右傾、左傾極限位時,噴桿相對于施藥機最大右傾角與最大左傾角為
(2)
(3)
即噴桿可調節范圍為
βS=βR+βL
(4)
式中βR——噴桿最大右傾角,(°)
βL——噴桿最大左傾角,(°)
l1、l2——右、左極限位置油缸伸縮量,mm
設噴桿作業時的目標角度為φd,施藥機的橫向傾角為φ,上一時刻噴桿相對于施藥機傾角β與噴桿對于目標調節量Δβ之和應為作業保持的目標角度φd與橫向傾角φ的差,則此時噴桿相對于施藥機傾角調節量Δβ為
Δβ=φd-φ-β
(5)
當前時刻噴桿應控制目標角度為
βd=Δβ+β=φd-φ
(6)
高地隙施藥機噴桿在自動調平模式下,能夠根據噴桿自身相對于施藥機車身角度完成噴桿調平動作。當施藥機車身左傾時,噴桿會相對于車身進行右傾調整,調平油缸活塞處于收縮狀態,此時根據活塞收縮行程計算出響應時間為
(7)
式中D——液壓油缸缸徑,mm
d——液壓油缸桿徑,mm
Δl——油缸活塞伸縮量,mm
q——液壓油缸流量,L/min
當施藥機車身右傾時,噴桿會相對于車身進行左傾調整,調平油缸活塞處于伸長狀態,可根據活塞伸長行程計算出響應時間為
(8)
噴桿自動水平調節處于向右傾或左傾時,因油缸活塞伸縮量很小并存在誤差,每轉動1°時可看作油缸伸縮量一致,所以噴桿每旋轉1°響應時間為
(9)
3 噴桿自動調平控制方法
3.1 橫滾角度數據預處理
施藥機在田間作業時,由于地勢不平會導致傾角傳感器獲取的角度信息發生階躍性變化,瞬時性、偶然性的信號變化會影響噴桿調平精度。本研究采用的傾角傳感器精度為0.01°,對相鄰角度信號的階躍脈沖做濾波處理即可提高角度信息的采集精度,因此該控制系統設計了一種移動平均濾波算法對原始角度信號進行平滑,圖4所示為濾波前后的角度測量數據對比。控制系統計算每個周期取得信號總和的平均值為
(10)
N——周期中取角度信號次數
Ai——當前傾角傳感器獲取的角度
更新積累移動平均值,每個周期平均值作為此刻噴桿的傾斜角度。

圖4 傾角傳感器濾波前后變化曲線Fig.4 Attitude sensor data before and after filtering
3.2 自動調平控制算法
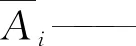
噴桿自動調平系統采用PID反饋調節算法作為傾斜度調節的主要算法對調平油缸伸縮量進行閉環控制,PID系統控制原理圖如圖5所示。對噴桿調平控制過程為:根據噴桿實際傾角和預設傾角的偏差計算調平油缸的流量方向和伸縮量,對偏差的比例、積分和微分進行控制,使偏差趨于零。調平控制器預設傾角φd作為PID控制系統輸入量之一,傾角傳感器測出噴桿實際傾角φa作為PID控制系統另一輸入量。為了精確控制噴桿傾角,PID控制器持續從比較器單元讀取誤差e(i),該單元對目標傾斜角φd與實際傾斜角φa進行減法運算。PID控制系統將e(i)進行比例、積分、微分運算,將電平信號發送至繼電器,繼電器通斷決定了電磁閥通斷和液壓油流向。
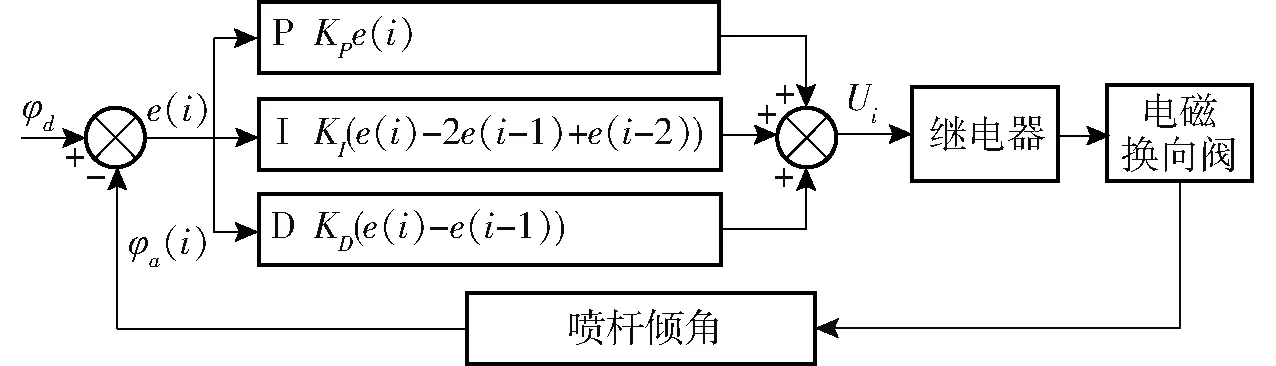
圖5 PID系統控制原理圖Fig.5 PID system control principle diagram
KP、KI和KD分別為比例運算、積分運算和微分運算的調整系數,為保證噴桿自動調平系統在快速響應的同時超調量不超過響應信號的1/2,噴桿自動調平試驗中確定選取PID參數為KP=5,KI=0.03,KD=1。當Ui>0時,電磁換向閥接通一端,使誤差e(i)減小到最小值emin;當Ui<0時,電磁換向閥接通另一端,誤差e(i)減小到emin;當Ui=0時,電磁換向閥停止工作。
4 調平控制器設計
4.1 硬件設計
噴桿自動調平系統硬件結構如圖6所示,硬件部分主要由控制器、檢測模塊、執行機構、電源模塊組成。控制器以PIC18F258處理器為核心,時鐘頻率20 MHz,供電電源5 V(DC),具有UART接口,電位計信號輸出端D0與處理器A/D轉換端口A0連接,對預設角度進行調整。檢測模塊為JY61P型傾角傳感器,工作電壓5 V(DC),輸出頻率為20 Hz,支持UART串口數字輸出,串口波特率選用115 200 b/s,橫滾角度檢測范圍為360°,具體技術參數如表2所示。執行機構為繼電器模塊,工作電壓5 V(DC),低電平吸合,高電平釋放,繼電器控制端IN+連接控制器I/O口C0、C1及IN-連接地,輸出端常開端NO1與常閉端NC1連接電磁換向閥。通過IN+高/低電平的設定,可控制電磁換向閥流向。電源模塊包括12 V直流電源、12 V轉5 V電源轉換模塊,可直接為傾角傳感器和控制模塊供電。

圖6 自動調平系統硬件結構圖Fig.6 Automatic leveling system hardware structure

表2 傾角傳感器主要技術參數Tab.2 Main technical parameters of inclination sensor
當C1高電平時,繼電器處于斷開狀態,電磁換向閥不工作;當C1低電平、C0高電平時,電磁換向閥控制調平油缸收縮,噴桿向左旋轉;當C1低電平、C0低電平時,電磁換向閥控制調平油缸伸長,噴桿向右旋轉。調平控制器通過UART_RX讀取到經過平均濾波運算后的噴桿傾斜角度,將此數值與A0端口讀取電位計反饋的數值進行比較,經調平程序處理后,發出高低電平信號,通過繼電器模塊的吸合釋放,控制電磁換向閥組控制油缸的流量和方向,從而實現噴桿水平的調節。
4.2 軟件設計
控制程序使用C語言開發,運行平臺為PIC18F258單片機。依據噴桿支架調節原理對控制系統進行設計,系統運行后按照固定的時間間隔運行主程序,首先對噴桿傾斜角度狀態進行檢測,然后根據傾斜狀態采用相應的控制方法調節噴桿支架的轉向,具體流程如圖7所示。噴桿不同傾斜角度會對應控制器不同動作狀態,結合油缸伸縮量與噴桿的幾何關系求得相對角度,實現噴桿自動調平的閉環控制。

圖7 系統控制流程圖Fig.7 System control flow chart
系統啟動后首先進行初始化,測量噴桿和施藥機傾斜角度,觀察噴桿是否達到預設角度以及與預設角度的差值,判斷是否對噴桿進行水平控制,當需要對噴桿支架進行水平控制時,單片機輸出高/低電平控制繼電器通斷,驅動電磁換向閥作業調節噴桿傾斜角度,直至調到目標傾斜角度;反之,重新測量角度信息調節油缸伸縮量,直至噴桿調整為目標角度。
5 試驗
為測試在自動調平模式下調平系統的穩定性和準確性,于2021年3月在山東理工大學生態無人農場分別進行了場地試驗和田間試驗。
5.1 場地試驗
5.1.1試驗方法與內容
施藥機作業幅寬是12 m,作業路徑為直線,施藥機行駛速度設為2.5 km/h,在高為0.3 m、總長為10 m、上下坡度為8°的試驗路面進行,如圖8所示。施藥機行駛過程中車身最大傾角可達到10°,地面高低起伏較大,可以模擬田間復雜路況。試驗示意圖如圖8所示,施藥機從點A開始啟動作業,行駛路線為A→B、B→A的往返運動,操作員控制機器一側的前、后輪相繼直線作業通過場地試驗路面,以檢驗施藥機噴桿自動調平系統的有效性。

圖8 場地試驗示意圖Fig.8 Schematic of step test
根據GB/T 24680—2009《農用噴霧機 噴桿穩定性 試驗方法》進行調平效果試驗,分別在噴桿橫梁和噴桿支架安裝傾角傳感器,輸出頻率為20 Hz,測得施藥機車身和噴桿的傾斜角度,以施藥機車身傾斜角度為對照組,傳感器通過UART串口實時向單片機輸出兩者傾斜角度。打開噴桿自動調平系統的情況下,操控施藥機,使其右側前、后輪依次駛上兩個階躍激勵路面,并設置噴桿預設角度為0°,記錄分析自動調平系統在不同響應閾值n(0.5°、1.0°、1.5°、2.0°、2.5°、3.0°),不同平均采樣值b(1、2、3、4、5、6、7、8)下的調平性能。
5.1.2試驗結果分析
為評價噴桿自動水平控制系統對噴桿實時控制的性能,對傾角傳感器的測量結果進行計算分析,在自動調平控制器安裝過程中會有安裝傾角誤差,通過調節確定預設角度為0.23°時為噴桿水平狀態,結果如表3所示。
從表3可知,在不同響應閾值和采樣值下,調平角度均方根誤差隨響應閾值增加而增大,隨采樣值增加而減小;調平精度隨響應閾值增加而降低,隨采樣值增加而增大。在測試過程中,響應閾值n為0.5°時,車身傾角的變化會使噴桿變化,噴桿振動會影響角度變化量在0.5°上下浮動,導致油缸一直處于調節狀態,噴桿調平穩定性低。當響應閾值n為1.0°~3.0°,自動調平傾角誤差隨響應閾值增大而增大,精度逐漸降低;測試數據中,響應閾值n=1.0°時,最大誤差為1.84°,最大平均絕對誤差為0.59°;響應閾值n=1.5°時,最大誤差為2.50°,最大平均絕對誤差為0.97°;響應閾值n=2.0°時,最大誤差為2.96°,最大平均絕對誤差為1.20°;響應閾值n=2.5°時,最大誤差為3.50°,最大平均絕對誤差為1.44°;響應閾值n=3.0°時,最大誤差為3.97°,最大平均絕對誤差為1.73°。
圖9為響應閾值分別是0.5°、1.0°、1.5°、2.0°時,施藥機車身與噴桿支架傾角變化曲線。裝配噴

表3 場地試驗數據分析結果Tab.3 Step test data analysis result
圖9 場地試驗結果Fig.9 Step test results
桿自動調平功能的施藥機,當調平系統中響應閾值n≤3.0°時,可以有效減小因階躍激勵路面而引起的噴桿傾斜。調平響應閾值n越小,系統響應時間越短,角度變化幅度越小。當n=1.0°時為系統最優響應閾值,平均絕對誤差最大為0.59°,均方根誤差最大為0.689°,可以將噴桿傾斜角控制在±1.5°范圍內,并在采樣值b=2時,平均絕對誤差與均方根誤差小、穩定性高,系統控制響應時間短,可以保證自動調平系統正常進行田間作業。
5.2 田間試驗
5.2.1試驗條件
田間試驗場地作物為小麥,小麥返青期高度為20~25 cm,選用山東理工大學研發的基于華盛泰山3WP-500G型施藥機的無人駕駛施藥機[21],如圖10所示。

圖10 試驗場景與機具Fig.10 Test field and equipment
5.2.2試驗過程與數據分析
作業路徑為直線,采用矩形地頭轉彎方式,自動導航行駛速度設為實際田間作業速度3.6 km/h。選用通過場地測試得到的最優參數響應閾值n=1°、采樣值b=2,設噴桿目標傾斜角為0°,其初始橫向傾角為0°,自動駕駛施藥機從點C(588 244.298 m,4 074 855.007 m)出發沿圖11中試驗規劃路徑行駛,從點D(588 239.221 m,4 074 855.369 m)至E(588 214.123 m,4 074 857.609 m)、E1(588 215.485 m,4 074 863.247 m)、D1(588 240.556 m,4 074 860.963 m),兩次試驗路線均為直線作業,當施藥機到達邊界時進行地頭轉彎進入鄰行作業,分別記錄兩個路徑不同路況,噴桿自動調平系統作業后噴桿與施藥機車身傾角信息,并通過傾角信息檢驗噴桿自動調平系統的調平性能。

圖11 試驗路徑規劃Fig.11 Test path planning

圖12 田間試驗結果Fig.12 Field test results
圖12為田間試驗傾角變化曲線,數據記錄頻率為50 Hz,以車身傾角傳感器測量的橫向傾角為參考,在田間試驗中,分別在D→E和E1→D1兩個路徑得噴桿調平后最大誤差1.53°,調平后角度平均值0.135°,均方根誤差0.454°,平均絕對誤差0.265°,70%時間內噴桿調平后角度在0.5°以內。表明噴桿自動調平系統田間工作正常,能實現噴桿工作時自動調平,在田間作業時偶有晃動,但能夠很快恢復平衡,噴桿沒有發生誤調現象,系統工作平穩。
6 結論
(1)設計了以PIC18F258為核心的噴桿自動調平系統,采用傾角傳感器實時測量噴桿傾角,并基于PID算法控制電磁換向閥實現噴桿自動調平控制。
(2)場地試驗表明,以華盛泰山3WP-500G型施藥機為平臺,裝配噴桿自動調平系統后,可以有效改善路面起伏不平引起的噴桿傾斜角度變化,在10°的臺階路面上以2.5 km/h速度行駛,在響應閾值為1°的情況下,平均絕對誤差不大于0.59°,均方根誤差不大于0.689°,可以將噴桿傾斜角控制在±1.5°范圍內,且無超調現象。
(3)田間試驗表明,噴桿支架傾角傳感器測得調平后角度平均值為0.135°,平均絕對誤差為0.265°,均方根誤差為0.454°,最大誤差為1.53°。噴桿自動調平系統田間工作正常,在地面起伏時偶有晃動,但能快速恢復平衡,未發生噴桿與作物接觸現象,噴桿調節穩定。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
故事大王(2016年7期)2016-09-22 17:30:08
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
