基于遙感圖像智能解譯的電力線自動選線系統設計
2022-03-15 13:45:50宋軍,詹偉,苗田,張中,孔龍,羅偉
電子設計工程 2022年5期
宋 軍,詹 偉,苗 田,張 中,孔 龍,羅 偉
(甘肅電通電力工程設計咨詢有限公司,甘肅蘭州 730050)
電力線路通信主要由電力線纜連接構成,電力線纜具體指發電廠、變電站、用戶三方之間的電能傳輸線路[1]。受傳送數據、信號方式、傳送地理位置等因素的影響,電力線可分為多種類型,常見的有架空線、線纜線、車間線[2]。
常規電力線路自動選線系統將多種功能相似的電力線纜混雜在一起使用,降低了電力線路的傳輸效率[3-4]。由于電力線自動選線系統的設計思想不能脫離線路設置的原則,一旦違反了該原則,就會擾亂電力系統的傳輸秩序,因此,電力線自動選線系統的設計應十分謹慎。
基于快速、準確的遙感技術,該文分別對電力線自動選線系統的硬件設備和軟件區域進行了設計,達到了預期的目的。
1 系統硬件設計
1.1 傳感器分析
電力線自動選線系統硬件區域傳感器通過遙感圖像識別電力系統對電力線的需求類型,并將檢測結果傳送到選線器中,維持系統正常運行。為提高HSUUWV 型傳感器的工作效率,設計容量負荷為容量量程的三分之二,并為傳感器預留了足夠的冗余空間,傳感器的使用量可達120%~150%[5-6]。傳感器示意圖如圖1 所示。

圖1 傳感器示意圖
通過靈敏度對傳感器性能進行評估,該文設計的傳感器靈敏度為89 V/g,器件輸出靈敏度系數為10[7-8]。使用阻抗78 Ω,工作電流20 A,工作電壓220 V,密封等級IP67,可防止油、水和腐蝕物對傳感器造成腐蝕,傳感器正常使用溫度范圍為-20~+70 ℃[9]。
1.2 影像糾正器分析
在遙感圖像拍攝過程中,受外界因素的影響,圖像會出現一定的偏差失真,因此影像校正裝置需要對遙感圖像進行校核,以確保電力線自動選線系統的工作精度。為實現上述功能,該文選用HISJ-928型圖像糾正器,該圖像糾正器的工作模式為自適應細分模式,其影響最小比為-1,最大比為2,對整體圖像的顏色閾值為0.1,對正常圖像閾值為0.05。
該圖像糾正器采用多路信號輸出,輸入方式保證了糾正器的工作速度,具有120×1 200 的兼容分辨率,為了提高糾正器的工作效率,設計了強制輸出函數。該裝置采用TCP-IP 控制方式,簡化了圖像糾正器的工作流程[10-11]。
1.3 處理程序分析
作為電力線自動選線系統硬件領域的重要設備之一,處理器的工作就是保持整個系統的穩定運行,為了達到系統的設計目標,采用了HIDH-87處理器。
處理器結構如圖2 所示。
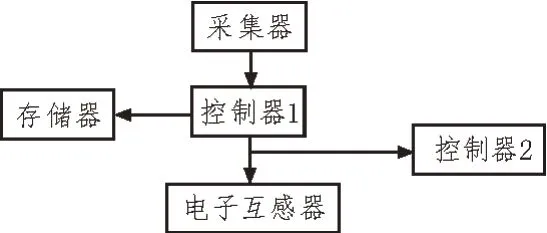
圖2 處理器結構
該處理器的主頻為3.0 GHz,外頻為133 MHz,處理器的核心運行速度為1 097.85 MHz,倍率為11.0,倍率越大,處理器的處理性能跨越度越大。處理器的緩沖數據為15 MB,能夠減少系統內排隊的冗余度。處理器采用16 核8 線程的模型完成工作,核心電壓為0.713 V。根據系統的設計理念和預期功能,處理器的性能要求十分地嚴格,另外處理器的指令集包括MMX、SSE、SSE4.1、VT-X、AVX 等,HIDH-87處理器的睿頻最高可以達到4.3 GHz[12-13]。處理器是系統功耗消耗最大的一個器件,該文突破傳統處理器的設計,將處理器的熱功耗調整為45 W,延長系統的待機時間,降低系統電池的損害程度。
1.4 選線器分析
選線器的任務是接收傳感器傳輸的電力線需求信息,然后根據遙感圖像內容進行電力線的選取,該文選擇LTC-804 型號的選線器,此型號的選線器支持遙感影像的編碼格式為字母格式,選線器可以支持8 條或者8 條以下的中繼線的用戶。此選線器設置多個候補線路,用于選線通道的應急。選線器的工作溫度范圍為0~55 ℃,工作的相對濕度為20%~90%,大氣壓力為70~106 kPa,選線器絕緣電阻為500 Ω,絕緣耐壓2.0 VAC,在一定程度上延長了選線器的工作周期。該選線器具有5 級的工頻磁場抗擾度,避免電力線選取過程中出現失誤。選線器電路如圖3 所示。

圖3 選線器電路圖
2 系統軟件設計
該方法的基本原理是利用遙感圖像智能判讀技術,通過一種推理方法,將遙感圖像中的信息與所設計的電力線自動判讀系統相匹配,對需要判讀的電力線信息進行判讀,然后根據信息的特點,選擇最佳電力線類型。圖像智能解譯主要由圖像事實、實時參數定義和推理信息組成,其中圖像事實是圖像的不可變信息,也是圖像解譯的關鍵,一旦圖像事實被錯誤提取,則解譯的結果必然是錯誤的[14]。圖像實時參數定義為規范理解圖像實時翻譯,防止誤譯,推理信息是依據積累的經驗知識完成推理,是遙感圖像解譯的核心內容。
智能解譯是遙感圖像的第一步,是通過計算機語言將圖像中的信息轉換成計算機語言,為智能解譯奠定數據基礎。由于遙感影像知識獲取過程具有復雜性和重要性,該文采用半自動獲取方法來完成影像知識的獲取。然后對計算機內部初始解譯知識庫進行調用,對所獲得的圖像知識數據進行精化處理;最后,通過圖像的解譯,根據圖像的解譯規則進行對照解譯,在完成解譯操作之后,為保證解譯的準確性,需要進行反譯驗證。
具體的解譯規則如下:
規則一:解譯過程中所涉及到的函數都要在函數運算的范圍內完成解譯,否則無效。
規則二:如果圖像特征是一個單一的線性影紋,即可得出解譯電力線為A 型線纜。
任何遙感圖像智能解譯的過程都必須遵循規則一,規則一是圖像可繼續推理解譯的前提條件。
解譯驗證利用信息泵和消息隊列進行動態雙重校驗處理,處理后得出的圖像參數與解譯前的參數相同,則表示解譯成功。
遙感圖像智能解譯技術本身就存在一定的不確定性,為了將技術的不確定性降至最低,該文通過概率推理模型平衡遙感圖像智能解譯操作過程的不確定性。概率推理模型的核心是可信度理論,平衡模型如下:

其中,CF1表示解譯規則前的置信度;CF2表示解譯規則的置信度;CF表示解譯規則后的置信度[15-16]。
通過對遙感圖像智能解譯技術原理和解譯過程的分析,總結出基于遙感圖像智能解譯的電力線自動選線系統的工作流程,如圖4 所示。

圖4 電力線自動選線系統流程
該方法首先對遙感獲取的圖像進行圖像預處理,主要分為數據過濾和圖像校正兩個步驟;對所獲得的電力線纜和電力系統圖像進行有效提取,剔除不具特定意義的圖像,簡化了校正過程的復雜性。根據處理后的電源圖像計算出像素點及其正確位置,然后對兩組數據進行平均估計,得到初步校正圖像。最終檢查校正圖像像素的灰度值是否與反算帶校正圖像像素的灰度值相同,如相同則校正正確,否則將插入到初始校正圖像像素,得到最終的校正圖像。
然后,對校正后的遙感圖像進行解譯分析;對遙感圖像進行智能解譯,根據圖像的基本參數,分別解譯出用于電力線路的地理位置、接觸方類型、電力線路的轉角位置和電力分配量等與電力線路相關的信息。
最后根據影像的解譯分析,得出電力系統內部最佳的電力線選線方案。
3 實驗分析
完成了基于遙感圖像智能解譯的電力線載波自動選線系統的設計,并達到規范要求和功能要求后,該系統才能投入運行,因此該文設計了對比實驗,驗證該系統的可行性。為確保試驗的科學性和真實性,采用文獻[1]中一種基于深度學習的電力線路自動選線系統(傳統的電力線路自動選線系統1)與文獻[2]中基于無人機影像的電力線路自動選線系統(傳統的電力線路自動選線系統2)與該文系統聯合進行實驗。該文以長春市綠園區某電力線路為實驗背景,該電力線路為普通建設用電線路,在進行實驗前,對現場進行必要的處理,防止外界因素的影響,同時觸發3 種電力線路自動選線系統啟動選線操作,在實驗過程中,由專業認證的電力自動選線系統同時完成選線操作,此選線結果作為重要的實驗結果對照數據。最后對選線結果進行對照分析,得出實驗結論。
得到的選線時間實驗結果如圖5 所示,選線結果準確率實驗結果如圖6 所示。由圖5、6 可知,基于遙感圖像智能解譯的電力線自動選線系統的選線結果和專業系統得出的選線結果相同,匹配度最高,3個系統得出的電力線自動選線結果的匹配度由高到低依次為基于遙感圖像智能解譯的電力線自動選線系統、傳統的電力線自動選線系統1、傳統電力線自動選線系統2。實驗完成時間由短到長依次是傳統的電力線自動選線系統1、基于遙感圖像智能解譯的電力線自動選線系統、傳統電力線自動選線系統2。通過以上結論可知,基于人工智能匹配的電力線自動選線系統不是最佳的選線系統。該文設計系統的選線結果還包括了其他建議的電力線類型,作為電力線連接的替補,然而傳統系統1 的選擇結果并不包括此項目。綜上所述,基于遙感圖像智能解譯的電力線自動選線系統是最佳的選線系統。
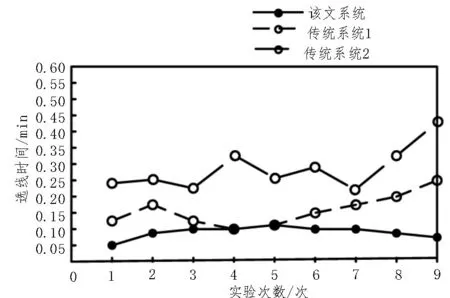
圖5 選線時間實驗結果
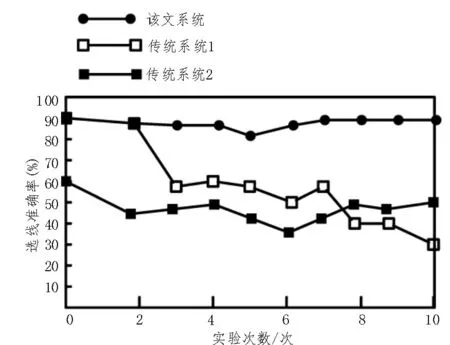
圖6 選線結果準確率實驗結果
得到這一結果的關鍵在于該文設計的系統采用遙感圖像智能解譯技術,將電力線路的應用環境高度還原,然后根據電力線路的特殊特征,與所有的電力線類型進行匹配分析,得出最適合的電力線類型。另外,該文在系統硬件區域設計的各個重要器件的性能都是最高的,極大地提高了系統的運行,保證了系統的工作效率。
4 結束語
該文在電力線自動選線系統的硬件部分分別設計了選線器、傳感器、圖像糾正器和處理器,各部分性能良好,保證了系統的運行效率。分析了遙感圖像智能解譯技術的原理和過程,并對系統的硬件區域和軟件區域進行了協調,完成了基于遙感圖像智能解譯的電力線自動選線系統的設計,通過實驗驗證了該系統的可行性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
