基于能量變化的水下航行器聲引信被動檢測
2022-03-16 04:12:56李榮融王明洲
水下無人系統學報 2022年1期
張 俊, 李榮融, 朱 健, 王明洲
基于能量變化的水下航行器聲引信被動檢測
張 俊, 李榮融, 朱 健, 王明洲
(中國船舶集團有限公司 第705研究所, 陜西 西安, 710077)
針對水下航行器對運動目標攔截末程聲引信實時有效檢測問題, 利用水下航行器所接收目標的輻射噪聲能量快速變化特性, 提出了一種水下航行器聲引信被動檢測方法。通過快速傅里葉變換對接收的目標輻射噪聲進行轉換, 在頻域實現頻帶內能量計算, 得到信號能量變化曲線, 利用設計的濾波器對能量曲線進行平滑處理, 并計算曲線斜率。仿真分析與實測數據處理結果表明, 信號能量曲線斜率能有效地反映水下航行器與目標交匯過程中聲引信接收噪聲的能量變化特點, 可以作為交匯最短距離和引信輸出最佳時刻的重要判據。
水下航行器; 聲引信; 被動檢測; 輻射噪聲; 斜率
0 引言
聲引信作為水下航行器在攔截目標末程完成運動目標探測、判定最小交匯距離、輸出引爆信號的有效近場聲感知手段, 越來越受到國內外學者的重視, 具有重要的工程應用價值[1-5]。對于魚雷等來襲目標, 在一定航行速度下其輻射噪聲譜級普遍大于100 dB[1]。理論分析和試驗表明, 當接收到的目標輻射噪聲能量遠高于自噪聲和環境噪聲時, 通過對運動目標輻射噪聲的被動檢測實現目標感知和引信判定的方法是有效的[6-9]。
時域能量檢測是一種基本、傳統的聲引信被動檢測方法[10-11], 其基本檢測過程為: 對目標輻射噪聲進行聲電轉換、濾波放大、能量平方和累積后, 輸出值與設定的門限進行比較, 最后輸出判決結果, 過程如圖1所示。
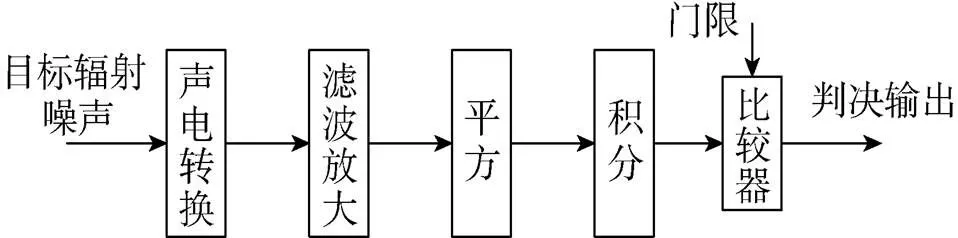
圖1 時域能量檢測基本過程
快速傅里葉變換(fast Fourier transform, FFT)是目前能量檢測的常用方法之一, 該方法將信號轉換到頻域, 然后對頻帶內信號進行求模平方和累加, 最后將計算所得的能量值與門限進行比較, 若超過判決門限, 則判斷檢測為有效。
由于水下航行器攔截運動目標是一個速度高、時間短, 空間相對方位變化快的過程, 水下航行器聲引信接收到的目標輻射噪聲具有明顯的空間通過特性, 噪聲能量隨著水下航行器與目標間相對距離的變化而快速起伏。基于此, 文中對聲引信接收的目標輻射噪聲能量曲線的斜率進行計算和分析, 將斜率特征作為聲引信被動檢測的重要判據, 為交匯最短距離和引信輸出最佳時刻的判定提供一種有效的方法。
1 聲引信被動檢測模型
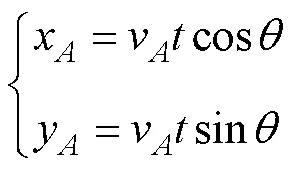
1.1 被動聲引信信號變化過程

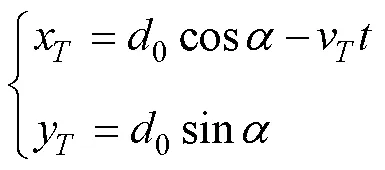
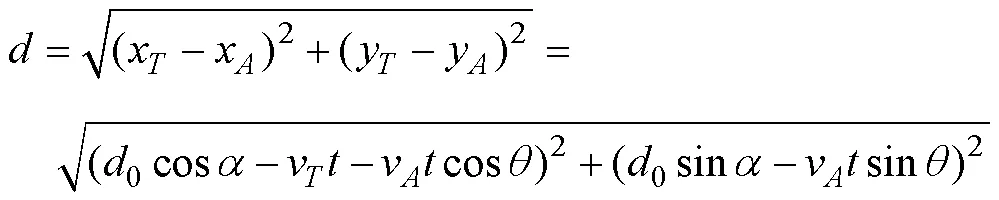
水下航行器位置坐標為
二者距離為
根據三角正弦定理
得到
根據遠場條件下球面波傳播規律, 目標輻射噪聲強度與距離的平方成比例, 水下航行器聲引信接收到的噪聲級為


1.2 斜率檢測器
斜率檢測是對信號能量變化的檢測, 本質上仍然為能量檢測。水聲信號二元能量檢測器如下式
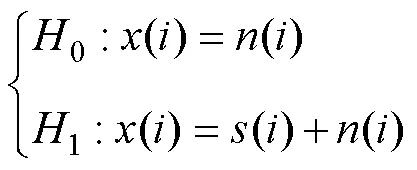
在工程實踐中, 構造檢測準則為
1.3 具體實現過程
基于目標輻射噪聲能量曲線斜率的聲引信被動檢測包含信號接收、濾波放大處理、數模轉換和后續信號處理過程; 信號處理過程包括信號能量計算、數據平滑、斜率計算和判定。圖3為基本檢測過程。

圖3 基于斜率特征的被動檢測基本過程
1.3.1 基于FFT的噪聲能量計算
將1個檢測周期內的信號分為一定長度的數據幀, 對每一幀數據進行FFT后計算頻帶內能量。各幀的能量構成如下能量序列

1.3.2 數據平滑濾波

FIR濾波器是一種具有穩定輸出的線性相位濾波器, 其基本結構是具有多個分節的延時線, 對每1節的輸出進行加權累加得到濾波器的總輸出。也就是說, 通過設計FIR濾波器系數對當前及之前各幀的被動噪聲能量的加權累加, 可以得到當前時刻的輸出。濾波器的輸出與輸入相比, 各點幅度有所改變, 且具有固定的時延。
利用FIR濾波器對被動噪聲能量數據進行平滑濾波的計算過程為

2 仿真分析
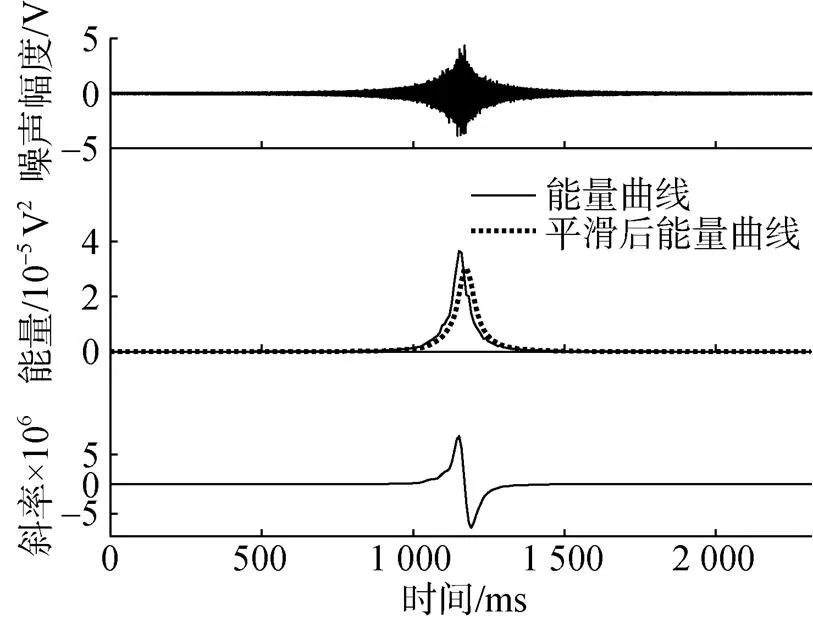
圖4 交匯夾角35°時的仿真結果
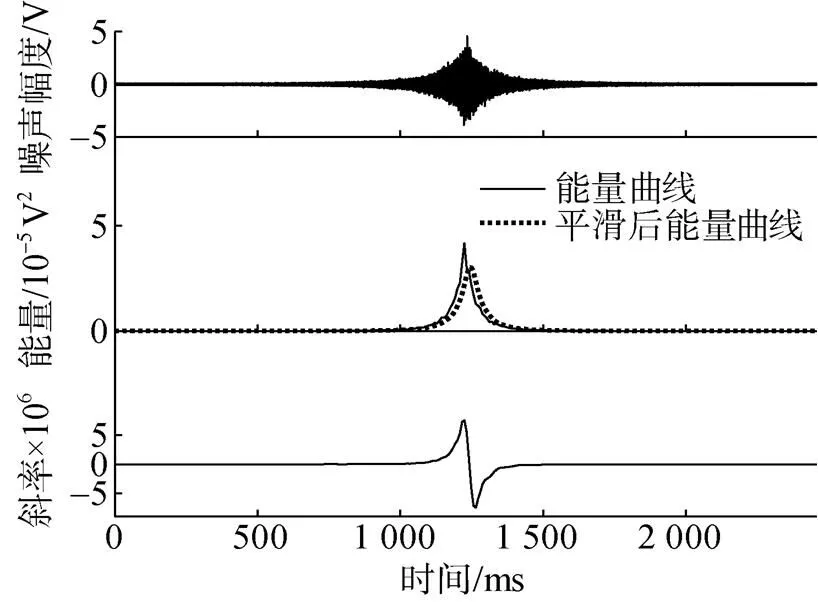
圖5 交匯夾角52°時的仿真結果
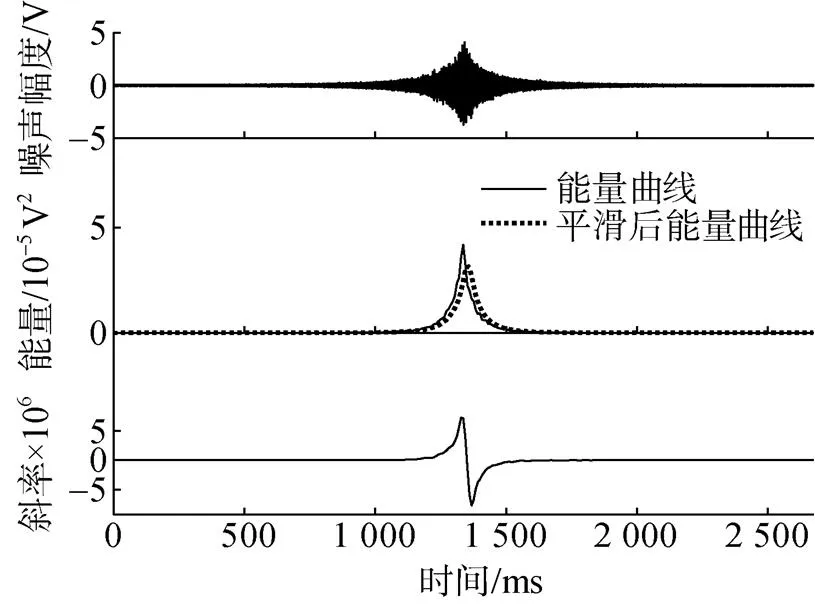
圖6 交匯夾角69°時的仿真結果
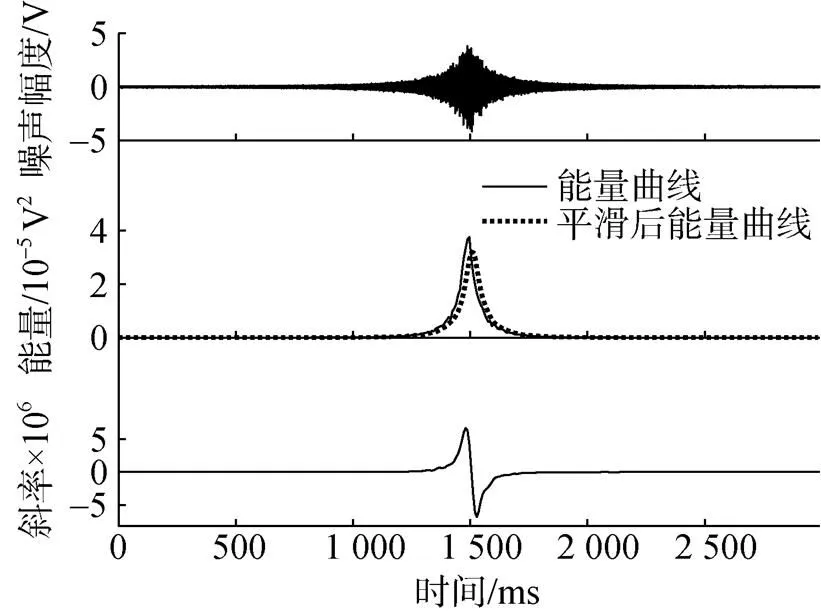
圖7 交匯夾角86°時的仿真結果
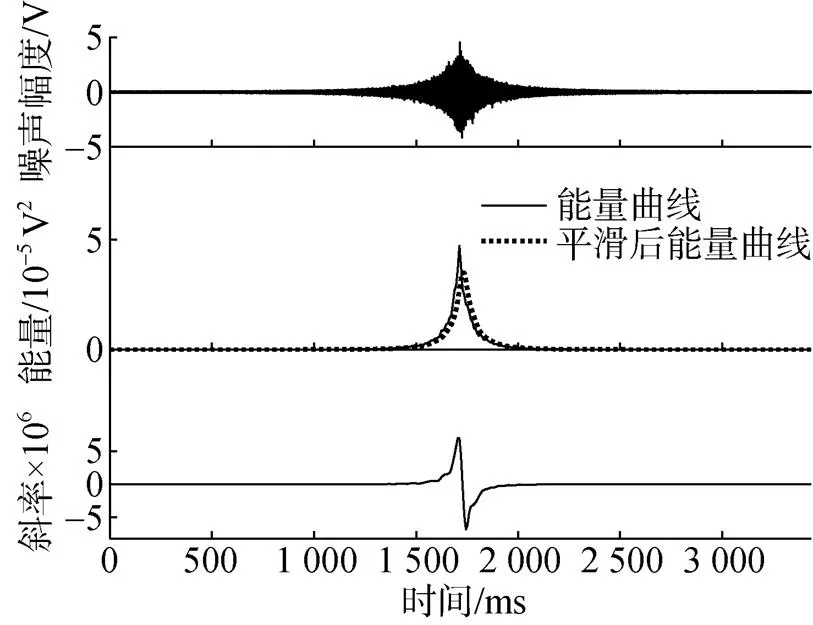
圖8 交匯夾角101°時的仿真結果
圖9 交匯夾角116°時的仿真結果
表1 不同交匯態勢條件下最大斜率
由上述圖所示結果可見, 在6種不同夾角的交匯態勢下, 平滑濾波器對航行器聲引信接收的目標輻射噪聲能量曲線均起到較好的平滑效果, 保留了能量曲線的變化特點, 說明所設計的平滑濾波器參數是合理的。
在各態勢下, 目標輻射噪聲通過特性明顯,水下航行器與運動目標交匯時刻, 在時域上能看到明顯的噪聲信號, 與無目標時刻有明顯變化, 能量曲線斜率有顯著提高。不同夾角態勢下最大斜率值均達到了106量級, 相對于無噪聲信號時刻的斜率均有較大的檢測余量。
3 試驗結果與分析

圖10 通道1數據斜率計算結果
Fig.10 Data slope of channel 1
圖11 通道2數據斜率計算結果
圖12 通道3數據斜率計算結果
表2 各通道數據最大斜率值
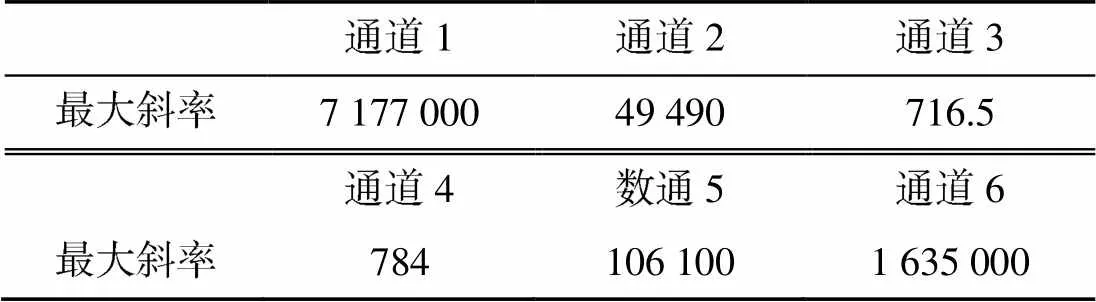
Table 3 Maximum slope value of each channel data
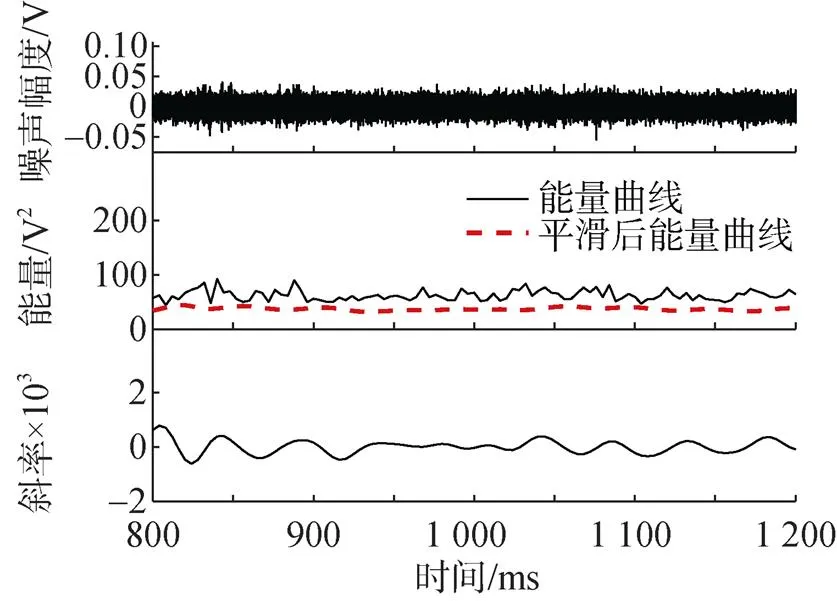
圖13 通道4數據斜率計算結果
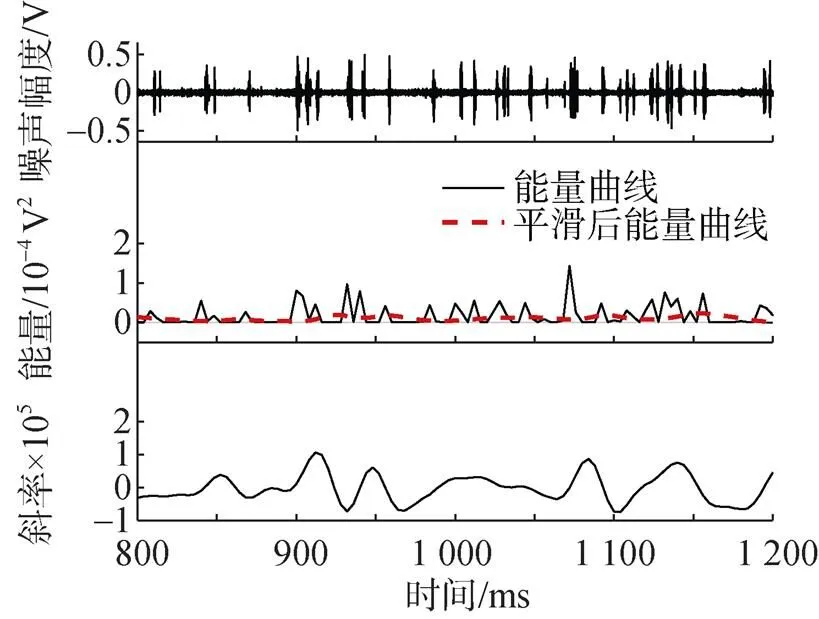
圖14 通道5數據斜率計算結果
圖15 通道6數據斜率計算結果
Fig.15 Data slope of channel 6
由各通道信號能量曲線斜率的計算結果可以看出, 由于通道1和通道6換能器接收波束在水下航行器與目標的快速交匯過程中掃過目標, 時域上可看到明顯的目標輻射噪聲波形, 交匯時刻能量快速上升, 能量曲線斜率相應地明顯變大。隨著交匯后水下航行器與目標空間距離的增大, 通道1和通道6的輻射噪聲又快速下降, 斜率值呈現負值并且絕對值與之前的正斜率相當。與通道1和通道6形成明顯對比的是通道3和通道4, 由于對應換能器波束沒有指向目標, 其接收到的信號以環境噪聲為主, 信號幅值均勻, 沒有明顯的起伏, 故其能量曲線不具有能量突變的特點, 整個斜率值接近0且比較穩定。通道2和通道5換能器波束沒有掃過目標, 所以也沒有收到目標輻射噪聲, 干擾的存在使其信號能量曲線不如通道3和通道4平緩, 但經平滑濾波器的濾波后其能量曲線相對平緩, 相應的斜率值與有目標背景噪聲的通道1和通道6相比小得多。可見在航行體與目標高速交匯的情況下, 能量較低或時間尺度較小的干擾不會對目標的檢測造成影響。
4 結束語
文中針對水下航行器聲引信被動實時檢測問題進行了研究, 利用攔截過程中水下航行器與目標空間方位變化快、聲引信接收到的目標輻射噪聲強度隨距離快速上升和下降的特點, 給出了基于能量曲線斜率的被動檢測具體實現方法。利用FFT分析實現噪聲能量的計算, 討論了用于能量平滑的FIR參數選取思路, 并進行了仿真分析和試驗數據驗證分析。通過仿真分析和試驗數據分析, 表明了所述被動檢測方法的有效性。
文中基于簡單的提前角攔截態勢對所述的檢測方法進行分析和仿真, 后續可針對復雜導引方法下的末程攔截彈道進行檢測方法的性能分析; 同時, 對于平滑濾波器參數的選擇也可開展理論分析研究, 建立科學有效的參數選擇模型, 為實際應用提供理論依據。
[1] 陳川.基于水下小平臺的被動聲探測定位技術研究[D].哈爾濱: 哈爾濱工程大學, 2013.
[2] 張士忠.聲引信中線譜檢測的相關方法和時頻分析[D].哈爾濱: 哈爾濱工程大學, 2007.
[3] 趙國庫.引信水中超聲波探測技術研究[D].南京: 南京理工大學, 2005.
[4] 譚菊琴.引信水下目標探測超聲波發射與控制技術研究[D].南京: 南京理工大學, 2015.
[5] 崔戶山, 崔貴平, 王明洲.基于短時傅立葉變化反魚雷魚雷主動聲引信淺水檢測方法[J].艦船科學技術, 2012, 34 (6): 87-90.
Cui Hu-shan, Cui Gui-ping, Wang Ming-zhou.Detection Methed of Anti-torpedo Torpedo’s Active Acoustic Fuze in Shallow Water Based on STFT[J].Ship Science and Technology, 2012, 34(6): 87-90.
[6] 尤立克.水聲原理[M].哈爾濱: 哈爾濱船舶工程學院出版社, 1990: 274.
[7] 陳子銓, 何文翔.干擾背景下的被動聲引信處理方法[J].聲學技術, 2018, 37(4): 58-59.
Chen Zi-quan, He Wen-xiang, The Treatment of Passive Acoustic Fuse in Presence of Interference[J].Technical Acoustics, 2018, 37(4): 58-59.
[8] 孫鐘阜, 龐博.主被動聲引信聯合使用策略研究[J].聲學技術, 2017, 36(6): 545-548.
Sun Zhong-fu, Pang Bo.Research on Joint Use Strategy of Active/Passive Acoustic Fuze[J].Technical Acoustics, 2017, 36(6): 545-548.
[9] 劉科滿, 相敬林, 侯鐵雙, 等.基于目標過零特性與能量特性的聲引信檢測方法[J].兵工學報, 2008, 29(9): 1044-1048.
Liu Ke-man, Xiang Jing-lin, Hou Tie-shuang, et al.A Joint Method of Zero-crossing Detection and Energy Detection[J].Acta ArmamentarII, 2008, 29(9): 1044-1048.
[10] 孫鐘阜.基于目標能量特性的被動聲引信[J].聲學技術, 2012, 31(6): 574-577.
Sun Zhong-fu.Passive Acoustic Fuse Based on Energy Feature of Target[J].Technical Acoustics, 2012, 31(6): 574-577.
[11] 姚曉瑩.水下目標信號的能量熵檢測與倒譜特征分析技術[D].哈爾濱: 哈爾濱工程大學, 2014.
[12] 胡廣書.數字信號處理-理論、算法與實現[M].北京: 清華大學出版社, 2003: 122.
Passive Detection of Undersea Vehicle Acoustic Fuze Based on Energy Variation
ZHANG Jun, LI Rong-rong, ZHU Jian, WANG Ming-zhou
(The 705 Research Institute, China State Shipbuilding Corporation Limited, Xi’an 710077, China)
Aiming at the problem of real-time and effective detection of an acoustic fuze at the end of the intersection between an undersea vehicle and a moving target, a passive detection of acoustic fuze for undersea vehicles was presented, which used the fast-changing energy characteristics of the
noise radiated by target.The noise received by the undersea vehicle acoustic fuze was converted using the fast Fourier transform(FFT), and the energy of the noise in the working frequency band was calculated to obtain the signal energy changing curve.Finally, the energy curve was smoothed by the designed filter, and the slope of the curve was calculated.The results of the simulation and processing of the measured data showed that the slope of the signal energy curve can effectively reflect the energy change characteristics of the noise received by the acoustic fuze in the intersection process between the undersea vehicle and moving target, and the slope of the signal energy curve can be used as an important criterion for the shortest distance between the undersea vehicle and moving target and the best time for acoustic fuze to give out an action signal.
undersea vehicle; acoustic fuze; passive detection; radiated noise; slop
張俊, 李榮融, 朱健, 等.基于能量變化的水下航行器聲引信被動檢測[J].水下無人系統學報, 2022, 30(1): 102-108.
TJ630.32; TB566
A
2096-3920(2022)01-0102-07
10.11993/j.issn.2096-3920.2022.01.013
2021-05-26;
2021-09-29.
張 俊(1984-), 男,在讀博士, 高級工程師, 主要研究方向為水中兵器仿真、水聲信號檢測.
(責任編輯: 楊力軍)
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
