智能巡檢機器人在膠帶輸送機棧橋的應用
2022-03-17 10:30:18郄佃喜
同煤科技 2022年6期
郄佃喜
(晉能控股煤業集團精煤分公司馬脊梁選煤廠 山西 大同 037003)
0 引言
選煤廠主要洗選工藝已實現模塊化,洗選工藝由塊煤系統、末煤系統、粗煤泥系統和煤泥系統四個部分組成,膠帶輸送機作為四個部分的主要運輸設備,承擔著選煤廠的原煤與精煤的運輸任務。在生產過程中,雖然膠帶輸送機的正常運行已通過跑偏、打滑、欠速等傳感器保護措施實現了信息化監控,但礦井產量大、生產任務重、膠帶輸送機工作負荷大,仍然會出現保護措施以外的一些生產問題,需要員工通過頻繁的巡視檢查來避免這些問題的發生。通過智能巡檢機器人在膠帶輸送機棧橋的投入應用,代替巡檢工巡視檢查來避免這些問題的發生,取得了一定的效果[1]。
1 智能巡檢機器人的組成結構
智能巡檢機器人主要由機器人本體、上位機、無線通訊系統、充電裝置和軌道系統組成,巡檢機器人本體主要由驅動機構、隔爆腔體、本安腔體、本安雙視云臺攝像機(含紅外熱像儀、可見光攝像機、補光燈)、測速機構、換向限位傳感器、停車傳感器、防爆自動充電插座等部分組成,能夠自動沿軌道往復移動,對選煤廠生產設備及生產環境進行全方位監測,如圖1所示。
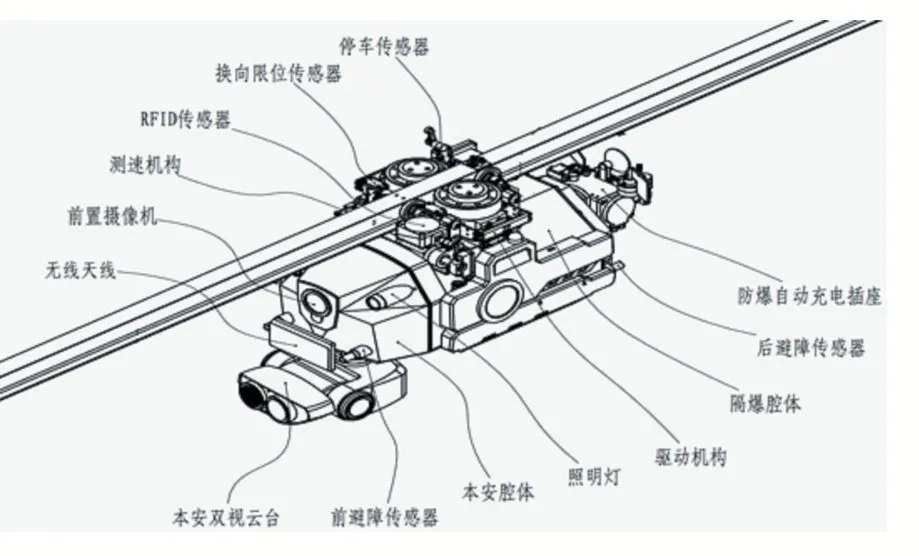
圖1 巡檢機器人組成結構示意圖
2 智能巡檢機器人技術參數及功能
巡檢機器人本體外形尺寸:795 mm×410 mm×550 mm(長×寬×高),重量:110 kg。巡檢機器人采用伺服電機驅動,運行速度全程可調,最大速度0.5 m/s。巡檢機器人巡航里程:在水平巷道,機器人充滿電最大連續運行約8 km。巡檢機器人充電時長5 h~6 h。爬坡性能:可攀爬不大于25度的軌道。
巡檢機器人具有以下功能。
(1)智能識別功能
機器人智能識別皮帶跑偏故障;智能識別煤礦井下水泵房、變電所等安裝的指針儀表、數字顯示表數據以及旋鈕、旋桿、閥桿、指示燈狀態等;定點識別大矸石、錨桿等形狀異物(選配)。
(2)聲音異常識別功能
現場設備在運行過程中發生磨損或者異常時,故障部位會產生較明顯的聲音異常,機器人實時采集現場環境聲音,對采集的聲音進行分析,發現異常及時發出報警信號,避免故障擴大化。
(3)紅外熱像圖采集及溫度異常報警功能
機器人搭載紅外熱像儀,實時獲取被檢測設備的紅外熱像圖,存儲并分析被檢測設備的發熱情況,預警皮帶電機、減速機、滾筒、托輥、水泵前后軸、巷道沿線電纜等溫度異常。
(4)移動圖像采集功能
在低照度、高濕度和粉塵環境下,通過巡檢機器人上搭載的多個攝像機實現對巡檢巷道沿線圖像采集。
(5)煙霧檢測功能
巡檢機器人上搭載有煙霧傳感器,實現巡檢巷道的煙霧檢測報警。
(6)環境探測功能
搭載環境探測傳感器,實現對現場CO、H2S、CH4、O2易燃、有毒危險氣體的檢測分析。
(7)自主避障功能
機器人避障系統能夠感知障礙物,具有響應快、靈敏度高特點。
3 智能巡檢機器人的工作原理
智能巡檢機器人能夠完全代替巡檢工,可靠巡檢、自主充電,利用其具有的智能識別功能、聲音異常識別功能、紅外熱像圖采集及溫度異常報警功能、移動圖像采集功能、煙霧檢測功能、環境探測功能及自主避障功能,實時采集、存儲、傳輸現場的圖像、聲音、溫度、煙霧等數據,通過對數據的分析,判斷是否存在設備故障以及故障位置,把巡檢工從惡劣的工作環境中解脫出來,減輕勞動強度、降低勞動風險,及時發現出現的問題,避免事故擴大化,大大減少生產過程中的非正常停機時間,具有終點自動換向、限位停止、定點校正等功能,設備體積小、結構緊湊、運行平穩,不影響正常行人和對設備的檢修工作[2-6]。
4 智能巡檢機器人的應用效果
巡檢機器人能夠完全代替巡檢工,可靠巡檢、自主充電,實時采集、存儲、傳輸現場的圖像、聲音、溫度、煙霧等數據,通過對數據的分析,判斷是否存在設備故障以及故障位置,把巡檢工從惡劣的工作環境中解脫出來,減輕勞動強度、降低勞動風險,及時發現出現的問題,避免事故擴大化,大大減少生產過程中的非正常停機時間,具有終點自動換向、限位停止、定點校正等功能,設備體積小、結構緊湊、運行平穩,不影響正常行人和對設備的檢修工作,如圖2。

圖2 巡檢機器人煤礦應用
2022年3月智能巡檢機器人在馬脊梁礦選煤廠膠帶輸送機棧橋投入使用,大大降低了歘煤、磁選機堵塞等現象的發生,減少了設備維護人員的工作量,提高了工作效率,使得設備的運轉效率得到明顯提升。
智能巡檢機器人在投入使用前,每月因巡檢不當影響生產時間約6 小時,投入使用后影響生產時間約為2小時,按平均每小時1 200 t煤量計算,則一年可以多入洗原煤5.76 萬t,多洗出精煤3.8 萬t,增加產值1900萬元。
5 結語
智能巡檢機器人在馬脊梁礦選煤廠膠帶輸送機棧橋的使用,有效地提升了設備維檢人員的工作效率,降低了巡檢工勞動強度,及時準確地發現問題,解決問題,為原煤運輸節約了時間,提高了原煤運輸量,創造了可觀的經濟效益,值得在類似洗煤廠推廣使用。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國科技論壇(2017年7期)2017-07-25 08:49:53
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
