基于HHC的旋翼噪聲主動控制風洞試驗研究
2022-03-18 09:55:26張羽霓孫朋朋陳衛星
直升機技術 2022年1期
張羽霓,趙 俊,樊 楓,孫朋朋,陳衛星
(中國直升機設計研究所 直升機旋翼動力學重點實驗室,江西 景德鎮 333001)
0 引言
直升機的噪聲水平高,會使軍用直升機在戰場過早地暴露,降低作戰的奇襲性和戰場生存能力;同時低空飛行的民用直升機會給城市環境帶來嚴重的噪聲污染。因此,圍繞直升機的主要噪聲源——旋翼開展噪聲控制技術研究具有重要意義。
為了實現直升機旋翼的降噪,國內外開展了一系列噪聲主/被動控制技術研究。其中,基于高階諧波控制(HHC)實現旋翼噪聲主動控制的控制原理是通過安裝在自動傾斜器下方的高頻液壓作動裝置,在旋翼槳葉總距(零階)和周期變距(一階)控制的基礎上,施加高階諧波控制,改變旋翼槳葉的運動規律以及高階氣動載荷分布和變化規律,從而改變旋翼噪聲特性,達到噪聲控制的效果。
國外針對基于HHC的旋翼噪聲主動控制技術開展了大量的研究工作。1986年,Hardin和Lamkin通過對建立的旋翼槳-渦干擾噪聲參數影響模型進行分析,指出HHC在旋翼噪聲主動控制方面的潛力。1994年,NASA Langley研究中心和德國宇航局(DLR)開展了風洞試驗驗證,結果表明在斜下降狀態下,適當的HHC控制可以降低5~6 dB的旋翼BVI噪聲。2001年美國NASA、德國DLR、法國宇航中心(ONERA)對BO-105槳葉模型進行的HARTⅡ試驗表明,HHC通過高階槳距作用使得槳-渦干擾位置從槳尖向槳根移動,導致了BVI噪聲輻射的降低。2015年,德國宇航中心(DLR)完成了基于多自動傾斜器的主動控制風洞試驗,結果表明對于BO-105槳葉模型,二階控制狀態下可降低4%功率需求、三階控制狀態下可降低4.5 dB槳-渦干擾噪聲。目前,在旋翼噪聲主動控制研究方面國內尚處于起步階段。南京航空航天大學針對HHC開展了一些理論建模研究和控制算法研究,而針對基于HHC的噪聲主動控制的風洞試驗尚未開展過;中國直升機設計研究所針對基于后緣襟翼控制的旋翼振動主動控制技術開展了一些原理性探索研究和試驗驗證。
基于此,本文開展了基于HHC的旋翼噪聲主動控制風洞試驗,得到了有/無主動控制旋翼在懸停、平飛以及斜下降狀態下的氣動噪聲特性,以及施加不同振幅、相位的高階諧波控制對噪聲水平的影響規律,探索了建立的基于HHC的旋翼噪聲主動控制系統的噪聲控制效果。
1 試驗設備及流程
試驗在中國直升機設計研究所8 m×6 m開口式風洞中進行,模型旋翼槳葉安裝在旋翼試驗臺上,氣動噪聲采用自由場傳聲器測量。本試驗中旋翼轉速為702 RPM,高階諧波控制的頻率為23.4 Hz(2)。
1.1 試驗模型及設備
模型旋翼槳葉的槳尖形狀為矩形,槳葉由OA3系列單一翼型配置,有翼型的起始位置為0.26。旋翼模型槳葉如圖1所示。該模型旋翼的基本參數見表1。

圖1 旋翼模型槳葉
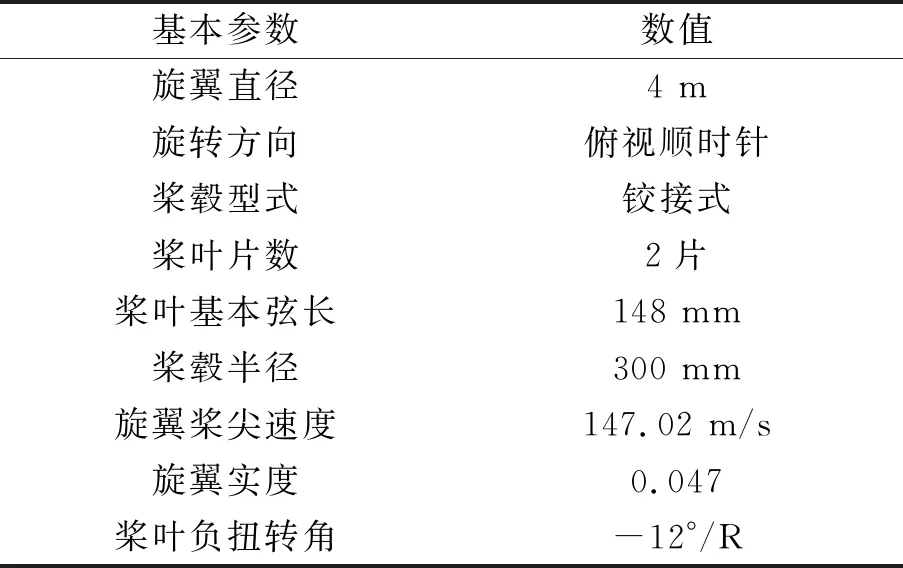
表1 模型旋翼基本參數
試驗設備包括風洞、旋翼試驗臺、高頻液壓作動器和測量系統。測量系統包括天平測力系統和自由場傳聲器陣列。試驗時還配備了監視報警系統和振動監視系統,實時關注旋翼模型及臺體的運行情況,確保試驗設備以及模型的安全。試驗整體情況如圖2所示。

圖2 風洞試驗整體情況
試驗中,利用安裝在自動傾斜器下方的高頻液壓作動器實現對旋翼槳葉槳距的主動控制。裝有高頻液壓作動器的旋翼試驗臺如圖3所示。高頻液壓作動器基本參數見表2。HHC的工作原理是將預設的旋翼總距和周期變距操縱信號輸入到計算機,經由控制算法計算得到作動器的位移時間歷程,作動器輸入經由不動環—動環—變距拉桿,傳遞到槳根,最終轉化為旋轉系下槳葉的預期變距運動,改變槳葉氣流環境,達到降低旋翼系統振動載荷和降噪的目的。本試驗為正弦諧波的單階輸入,采用以下方式確定:
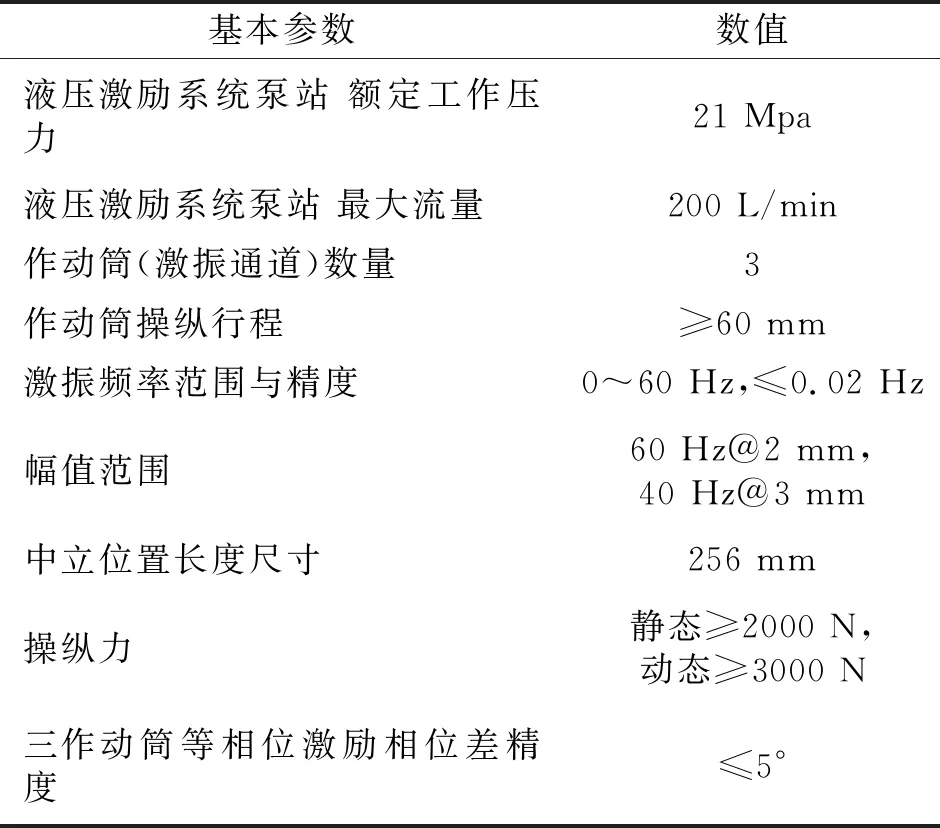
表2 高頻液壓作動器基本參數
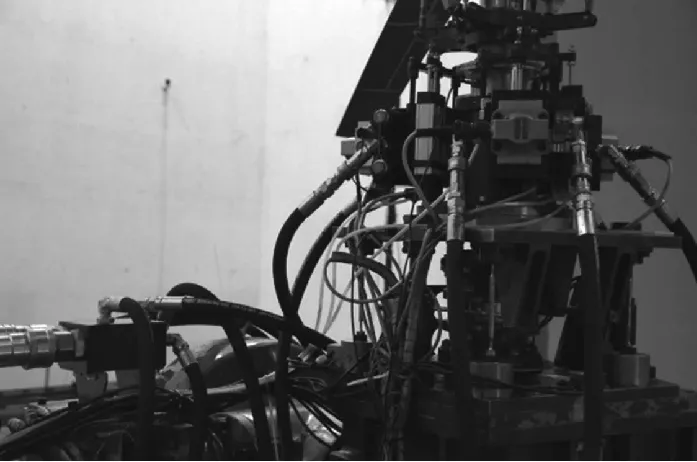
圖3 裝有高頻液壓作動器的旋翼試驗臺
=*cos[(*)-]
(1)
其中,為激勵振幅,代表階旋翼諧波輸入,為旋翼方位角,為激勵相位對應的最大幅值。
在傳聲器布置方面,開展旋翼噪聲主動控制前飛試驗時,為保障安全并盡量減少支架對聲陣列的干擾,選擇在90°、130°兩個方位(如圖4中實心圓點)放置傳聲器支架。綜合考慮傳聲器支架必須在風場外以及減弱聲反射影響等因素,傳聲器支架采用分節弧形支架安裝方式。弧形支架半徑為4.0(即支架弧形桿距槳轂中心約8 m),弧度范圍為30°~100°,間隔10°放置傳聲器,如圖5所示。懸停試驗在風洞大廳展開,選擇在140°、230°方位布置傳感器支架,傳聲器支架弧形半徑為3.0,角度范圍為60°~100°。
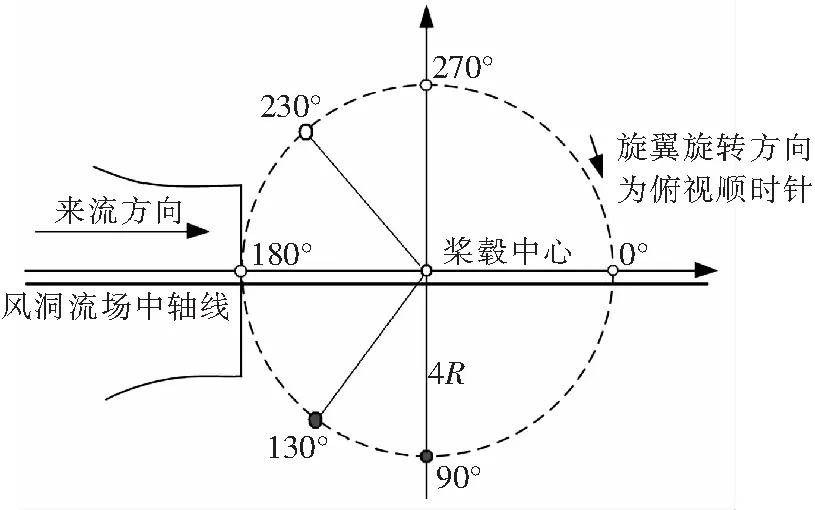
圖4 噪聲傳感器支架位置示意圖(俯視)
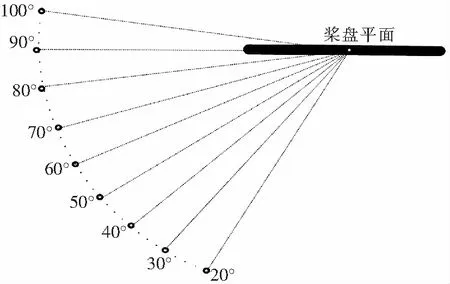
圖5 噪聲傳感器支架弧度角示意圖(平視)
1.2 試驗流程及試驗狀態
基于HHC的旋翼噪聲主動控制試驗首先對旋翼進行配平操縱,在無主動控制情況下獲得給定前進比和軌跡角下的總距、橫縱向周期變距等操縱量;進行主動槳距控制試驗時,在原有操縱量基礎上施加激勵控制實現給定幅值、頻率、相位的高階諧波控制。采用專用的傳聲器陣列獲得旋翼在各種狀態下有/無主動控制的氣動噪聲特性數據,得到旋翼噪聲水平隨主動控制輸入的變化關系,探索建立的基于HHC的旋翼噪聲主動控制系統的噪聲控制效果。試驗狀態見表3。
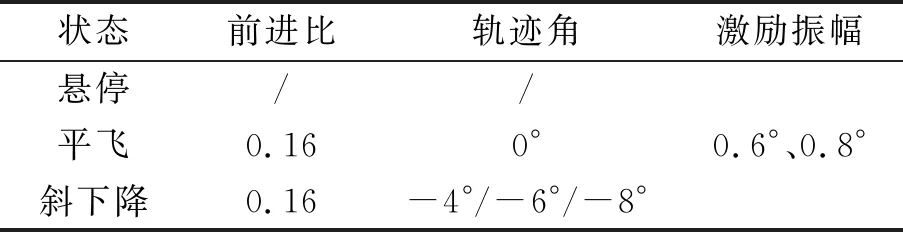
表3 試驗狀態
2 試驗結果與分析
首先給出了旋翼性能和噪聲的重復性試驗對比情況,驗證了試驗結果的有效性;接著給出了懸停、平飛、斜下降狀態下,不同激勵振幅以及激勵相位對旋翼噪聲的影響曲線。當激勵相位為某一數值時,噪聲聲壓級最小,定義此相位為最優噪聲控制相位。對此狀態下該測點有無激勵的聲壓時間歷程和頻域對比情況進行了初步的分析。
由于建立的基于HHC的旋翼噪聲主動控制系統主要關注的旋轉噪聲和BVI噪聲集中在旋翼旋轉頻率及其倍頻上,寬帶噪聲占比較小,并且試驗環境為非聲學測試環境,故本文將采集到的多個周期噪聲數據平均到一個周期內,由聲壓的時間歷程求得平均處理后的聲壓級。
2.1 重復性對比驗證
圖6為懸停總距掃描試驗(總距6.6°~13.6°)的旋翼功率系數隨拉力系數變化曲線的重復性對比。從圖中可以看出懸停總距掃描試驗的數據重復性良好。圖7為斜下降狀態下兩次配平試驗的旋翼拉力時間歷程曲線。從圖中可以看出相同狀態下前后兩次的試驗結果曲線吻合度較高,表明本次試驗狀態穩定,測量數據重復性良好,試驗數據較可靠。
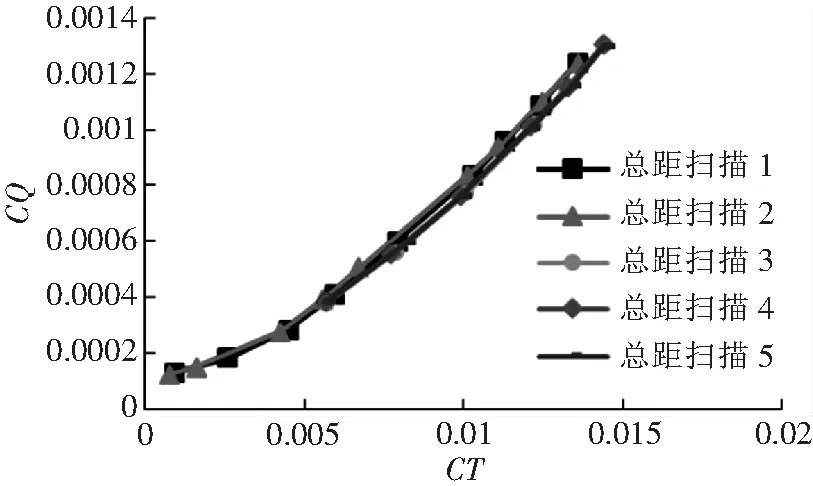
圖6 旋翼功率系數隨拉力系數變化曲線(懸停狀態)
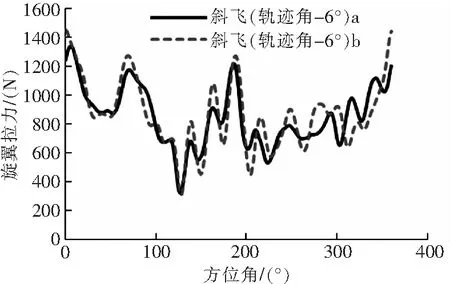
圖7 旋翼拉力的時間歷程(斜下降狀態)
圖8為斜下降狀態不同測點噪聲聲壓級測量重復性結果,對采集的噪聲結果進行了平均處理,縱坐標為平均后聲壓級。從圖中可以看出,在同一狀態下同一噪聲測點的數據重復性較好,表明各傳聲器狀態良好,噪聲測量結果可靠。
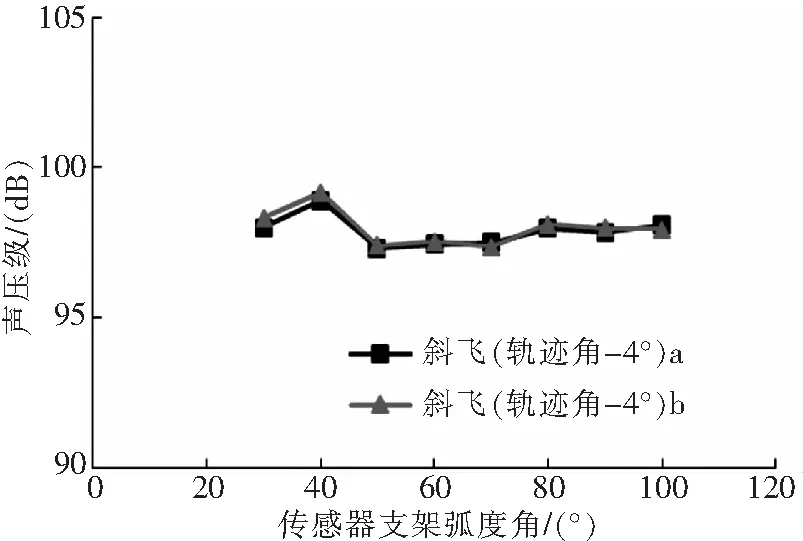
圖8 斜下降狀態(μ=0.16,軌跡角-4°)噪聲聲壓級隨弧度角變化曲線(方位角90°)
2.2 激勵振幅對旋翼噪聲的影響
從圖9中可以看出,懸停試驗狀態對自動傾斜器不旋轉環施加總距13.6°、激勵頻率23.4 Hz(2)、振幅0.6°和0.8°的不同相位的主動控制后,相對于無激勵狀態(圖中三角標記直線,下同),各傳聲器位置處的噪聲頻譜聲壓級都有明顯的變化。
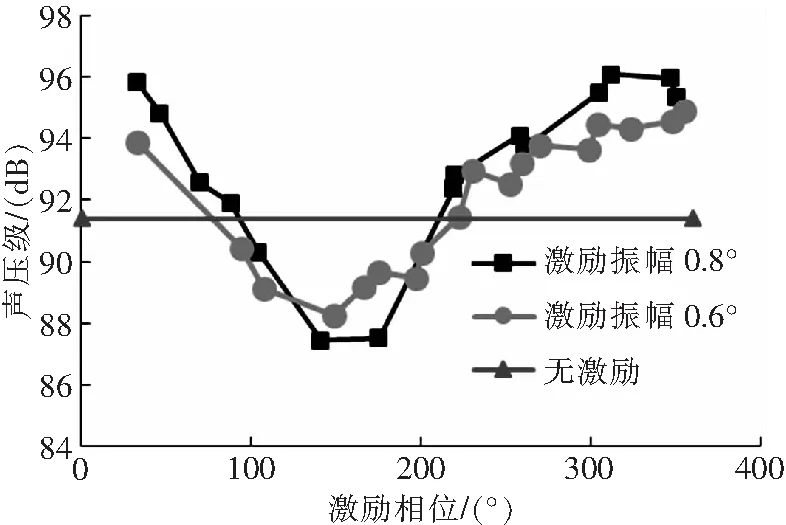
圖9 懸停狀態不同激勵幅值噪聲聲壓級隨相位變化曲線(方位角230°,支架弧度角100°)
對于激勵幅值0.8°的主動控制輸入,激勵相位在150°附近時,方位角230°、弧度角100°的傳聲器測得的噪聲聲壓級相對較低,150°為其最優控制相位,聲壓級最多降低4 dB。激勵振幅0.6°的主動控制輸入與振幅0.8°的聲壓級變化趨勢一致,最優控制相位也相同。兩種激勵聲壓級均在90°~200°控制相位區間內有所降低,說明激勵幅值的變化對最優激勵相位的影響不大。在該狀態下,對比兩種激勵幅值,隨著激勵幅值的增大,激勵產生的影響增大,某些激勵相位范圍的噪聲水平增加,最優相位所產生的降噪效果更加明顯。
圖10中的(a)、(b)分別給出了前進比均為0.16的平飛狀態和斜下降狀態(軌跡角-6°),施加振幅為0.6°和0.8°的不同相位的主動控制激勵后,不同測點的噪聲聲壓級變化曲線。其中,平飛狀態在兩種幅值的主動控制輸入下,在方位角90°,弧度角90°位置處最優控制相位在激勵相位225°附近,聲壓級最多降低1.7 dB,在激勵相位150°~280°區間內實現噪聲控制效果。斜下降狀態在方位角130°,弧度角70°位置處最優控制相位在激勵相位310°附近,聲壓級最多降低1.2 dB,有效降噪激勵相位區間為210°~360°。與圖9結論不同的是,在平飛和斜下降狀態下,均隨著激勵幅值的增大,旋翼噪聲水平反而有所增加,其最優相位所產生的降噪效果也減弱。由此可得出,激勵幅值增大對于旋翼噪聲控制未必一定有利,不同幅值的噪聲控制效果也與旋翼狀態有關。
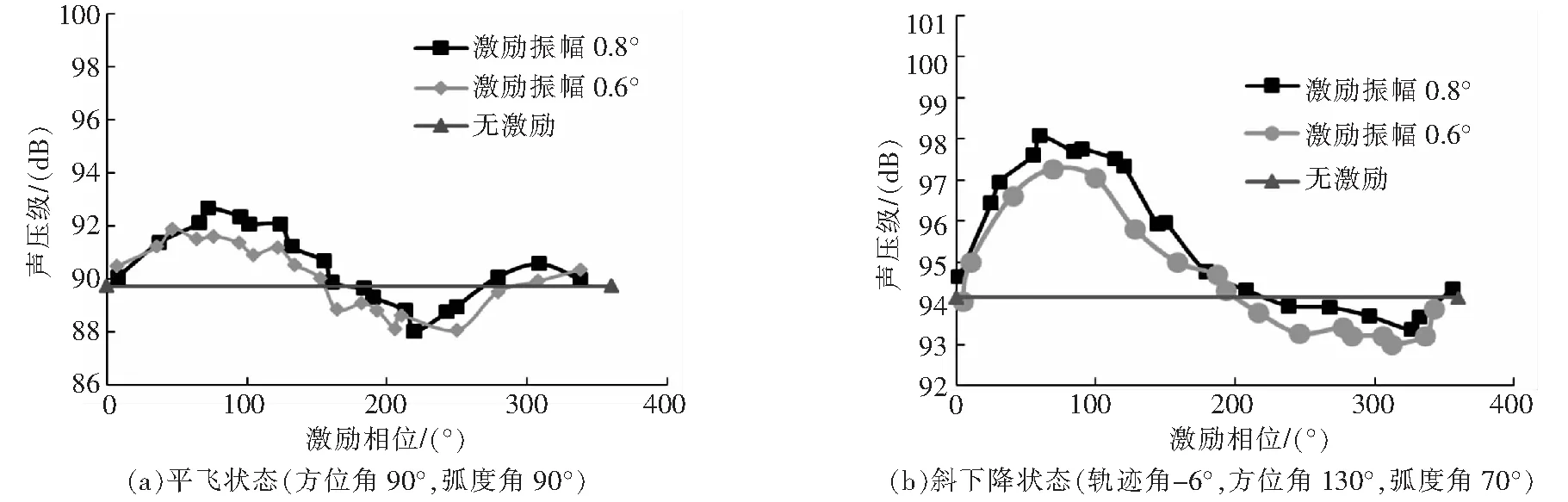
圖10 不同激勵幅值噪聲聲壓級隨相位變化曲線
2.3 激勵相位對旋翼噪聲的影響
從圖11可以看出,懸停狀態下,對自動傾斜器不旋轉環施加激勵振幅為0.8°的不同相位的主動控制后,相對于無激勵狀態,各激勵相位下的噪聲聲壓級有明顯的變化。對于方位角230°,弧度角100°測點,在激勵相位0°~100°以及220°~360°控制區間內,噪聲相比于無激勵狀態增加;激勵相位100°~220°區間內,噪聲降低,在控制相位166°時噪聲控制效果最優,測點聲壓級降低量達到了4.4 dB。

圖11 懸停狀態有無激勵噪聲對比(方位角230°,弧度角100°)
對此狀態下最優控制相位166°有/無主動控制的聲壓時間歷程以及頻域對比情況進行初步的分析。從圖12、圖13可以看出,施加主動控制后,該測點處施加主動控制前后聲壓隨時間歷程的變化趨勢一致,噪聲聲壓的負峰值明顯降低,從-1.0 Pa降低到-0.5 Pa,噪聲聲壓級減小;頻譜中能量較大的主要低階成分均有不同程度的降低,其中1階成分(與高階諧波控制的基頻11.7 Hz不同,此處基頻為23.4 Hz)降低較大,該測點處噪聲1階成分降低達11.09 dB。
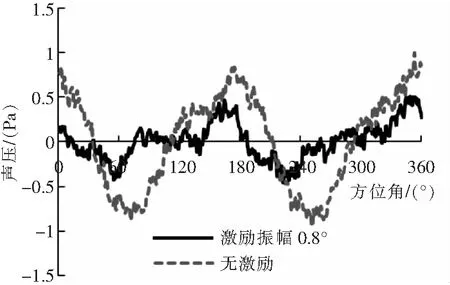
圖12 懸停有無激勵的聲壓時間歷程對比
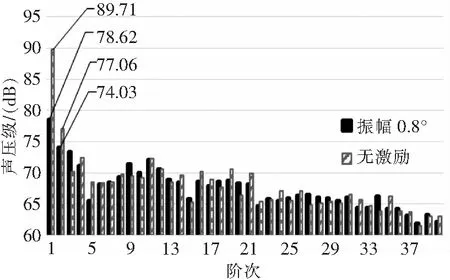
圖13 懸停有無激勵的聲壓頻域對比
圖14和圖15分別給出了前進比0.16的平飛狀態下,施加激勵振幅0.8°與振幅0.6°的主動控制,方位角90°,弧度角30°測點與方位角130°,弧度角30°測點處有/無主動控制各激勵相位下的噪聲聲壓級對比情況。對于圖14中測點,在控制相位225°時聲壓級降低3.3 dB;最優控制相位為346°,聲壓級降低量達到了3.8 dB;有效降噪激勵相位區間為0°~50°和170°~360°。對于圖15中測點,聲壓級在250°最優控制相位下降低3.1 dB。
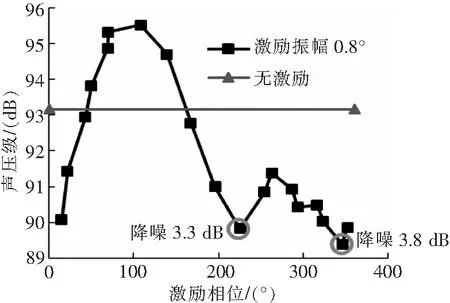
圖14 平飛狀態(μ=0.16)有無激勵噪聲對比(方位角90°,弧度角30°)
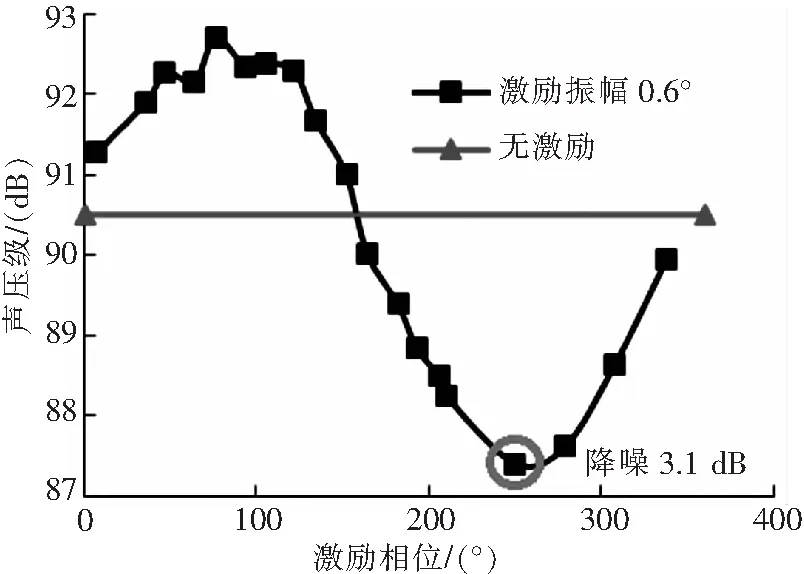
圖15 平飛狀態(μ=0.16)有無激勵噪聲對比(方位角130°,弧度角30°)
圖16給出了斜下降狀態下(=0.16,軌跡角-6°),噪聲監測點(方位角90°,支架夾角40°)處噪聲聲壓級隨高階諧波控制的激勵相位的變化曲線。最優控制相位為262°,噪聲降低量為1.1 dB。圖17為斜下降軌跡角-4°狀態,噪聲監測點(方位角130°,支架夾角70°)的最優控制相位為259°,噪聲降低量為1.3 dB。
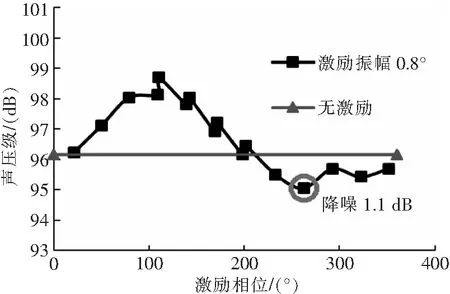
圖16 斜下降狀態(μ=0.16,軌跡角-6°)有無激勵噪聲對比(方位角90°,弧度角40°)
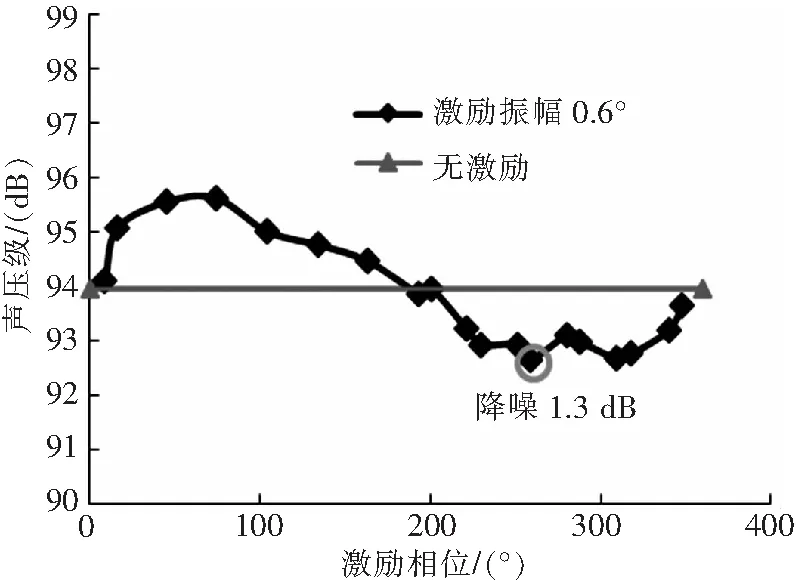
圖17 斜下降狀態(μ=0.16,軌跡角-4°)有無激勵噪聲對比(方位角130°,弧度角70°)
3 結論
本文基于構建的基于HHC的旋翼噪聲主動控制系統及旋翼噪聲測量系統,在中國直升機設計研究所8 m×6 m開口式風洞開展了不同飛行狀態下的旋翼噪聲主動控制風洞試驗。試驗通過施加不同幅值、相位的高階諧波控制,探索了旋翼懸停、平飛和斜下降等典型狀態下施加主動控制的降噪效果,主要得到了以下結論:
1)本文構建的基于HHC的旋翼噪聲主動控制系統對懸停、平飛以及斜下降三種狀態均實現了有效降噪。通過對比有/無主動控制的旋翼噪聲可以得出:在懸停、平飛以及斜下降典型狀態下分別能實現最大降噪4.4 dB、3.8 dB、1.3 dB。
2)通過改變主動控制系統的激勵振幅和相位,獲得了不同主動控制參數對旋翼噪聲的影響特性。其中,激勵振幅的增大對于旋翼噪聲控制未必一定有利,不同幅值的噪聲控制效果也與旋翼狀態有關;不同的激勵相位對旋翼降噪效果影響不同,對于本文的裝有高頻液壓作動器的旋翼主動控制系統來說,合理的激勵相位設置尤為重要。
3)施加2諧波控制,主要是使得旋翼噪聲的低階成分降低,引起噪聲聲壓級下降,從而實現對旋翼噪聲的主動控制。