基于禿鷹搜索算法的部分遮蔽條件下光伏陣列重構方法
2022-03-18 04:53:48王龍陳卓黃文力郭寅遠李響常緒成楊博
電力建設 2022年3期
王龍,陳卓,黃文力,郭寅遠,李響,常緒成,楊博
(1.鄭州航空工業管理學院,鄭州市 450015;2.許昌開普檢測研究院股份有限公司,河南省許昌市 461000;3.昆明理工大學電力工程學院,昆明市 650500)
0 引 言
近年來,由于能源需求的急劇增加和化石能源儲量的快速減少,可再生能源的開發利用引起了更廣泛的關注,并逐漸取代了大部分化石燃料。太陽能作為其中最有潛力的一種[1-2],其普及得益于其便于維護與環境友好的特點,以及光伏電池成本的逐漸下降和電力轉換效率的提高[3]。最新的趨勢表明,光伏組件的成本一直在穩步下降,這給新能源發電技術帶來了無限的生機和活力[4]。至2020年底,風能和太陽能發電量相較于2019年增加了15%,其中光伏發電的裝機容量比2019年增加了127 GW[5]。
光伏發電大規模應用于并網系統的主要障礙是在部分遮蔽條件(partial shading condition,PSC)下輸出功率的劇烈波動[6-7]。當部分遮蔽是由一些動態的天氣條件,如移動的云或灰塵引起時,盡管光伏陣列的初始設計是適當的,但仍不可避免地造成嚴重的電力損失和光伏系統的輸出特性惡化[8]。在PSC下,由于旁路二極管的作用,遮蔽和未被遮蔽的組件輸出特性不一致,導致光伏陣列的功率-電壓(P-V)輸出特性曲線上出現幾個峰值,引起最大功率點跟蹤(maximum power point tracking,MPPT)的誤判和光伏發電效率的降低[9-10],甚至導致熱斑效應進而損傷光伏板,造成嚴重的經濟損失。
光伏組件通過串聯和并聯組成光伏陣列,以滿足電力需求并延長其使用壽命[11]。光伏陣列的傳統拓撲結構包括串并聯(series parallel,SP)、網狀連接(total cross tied,TCT)、橋式連接(bridge linked,BL)和蜂巢(honey comb,HC),其中SP連接是最簡單和最經濟的拓撲結構[12]。然而,由于輻照強度和輸出電流之間存在近似正比例的關系,SP并不適用于部分遮蔽情況[13],這是因為當SP連接的組件嚴重失配時,光伏陣列的輸出功率將急劇下降。目前,TCT拓撲具有最穩定的拓撲結構和最高的輸出效率[14]。
光伏重構技術是減輕部分遮蔽影響的有效方法,可分為動態重構方法和靜態重構方法。動態重構方法主要通過使用開關矩陣來動態地改變光伏陣列的電氣連接,以便均勻地分散陣列上的陰影,具有布線靈活,實時性強的優點[15]。經過重構的光伏陣列可以獲得最優的陰影分布,有效均衡了陣列的行電流,可以有效減少陣列輸出特性的多峰,對MPPT有一定的改善效果,實現了減輕PSC影響和提高輸出功率的目標。因此,研究光伏重構技術具有一定的工程價值和現實意義。
基于啟發式算法的光伏重構技術在光伏重構技術中較受歡迎,因為這種方法在大規模的光伏陣列中表現良好,能夠有效減少開關矩陣的切換頻率。遺傳算法(genetic algorithm,GA)首先被應用于光伏重構[16],它實現了陰影的均勻分布。在過去幾年中,啟發式算法被用來處理光伏陣列重構問題,包括引力搜索算法(gravity search algorithm,GSA)[17]、蚱蜢優化算法(grasshopper optimization algorithm,GOA)[18]、粒子群優化(particle swarm optimization,PSO)[19]、水循環算法(water cycle algorithm,WCA)[20]等。
基于上述討論,本文提出一種基于禿鷹搜索算法(bald eagle search,BES)的光伏陣列重構方法。通過3個評價標準,即失配損耗、填充因子和功率提升百分比,對BES獲得的優化結果進行評估,并與蟻群算法(ant colony optimization,ACO)[21]和禁忌搜索算法(tabu search,TS)[22]進行比較。結果證明BES的優化效果優于ACO和TS,可有效緩解部分遮蔽帶來的影響。
1 光伏陣列模型
N×N的光伏TCT陣列模型如圖1所示。在TCT配置中,處于同一行的組件并聯連接,處于同一列的組件串聯連接。
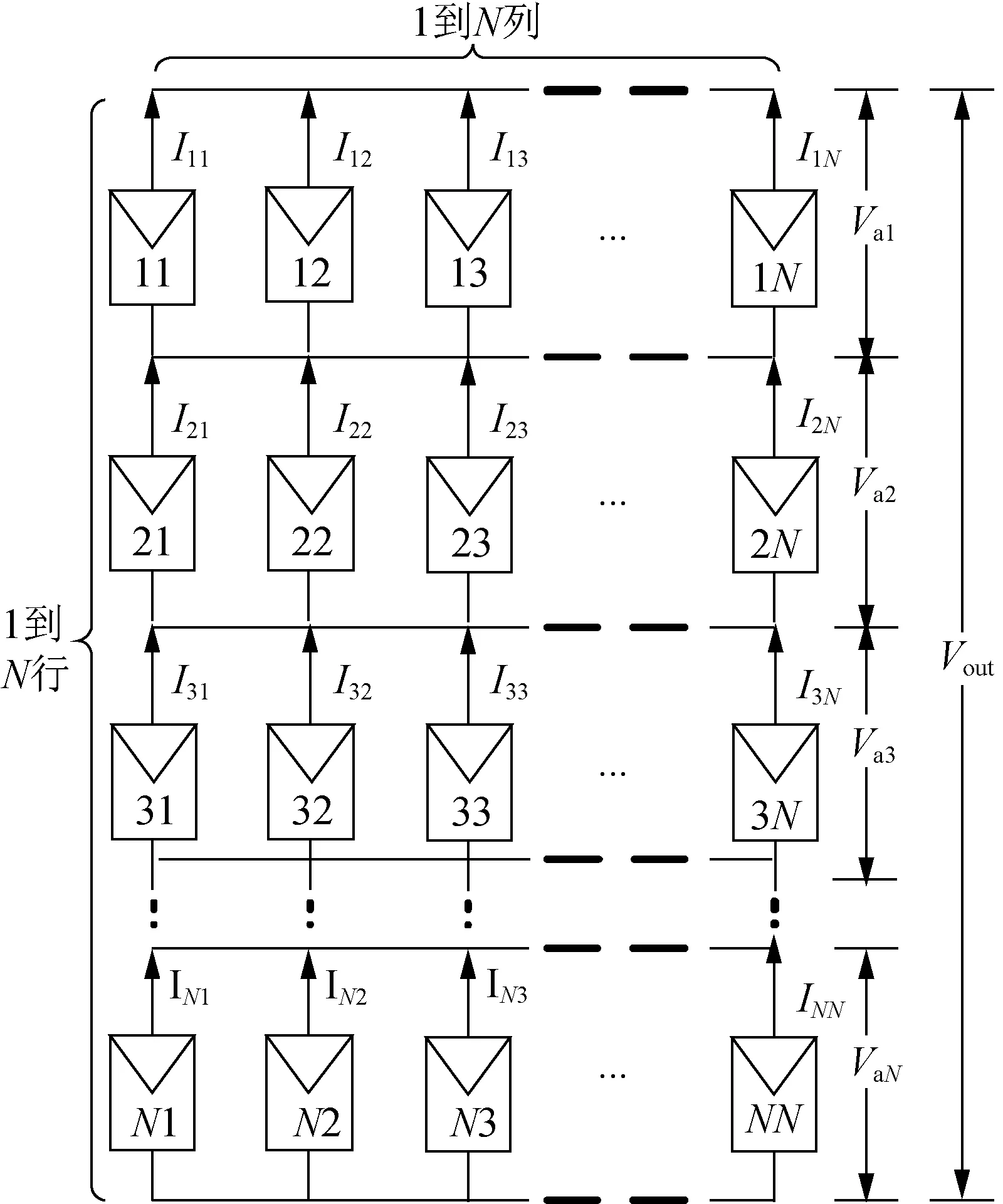
圖1 N×N光伏TCT陣列模型Fig.1 N×N TCT connected array
(1)
(2)
式中:Vout為總輸出電壓;Vmaxh為第h行的最大輸出電壓;Iout為每個節點的輸出電流;Ihc為第h行第c列組件的輸出電流。
光伏輸出特性的3個評價標準包括失配損耗、填充因子和功率提升百分比。
1)失配損耗。失配損耗PM定義為無陰影陣列和部分陰影陣列的最大輸出功率之差。
PM=PGMPP(US)-PGMPP(PS)
(3)
式中:PGMPP(US)為無陰影陣列的最大輸出功率;PGMPP(PS)為部分陰影陣列的最大輸出功率。
2)填充因子。填充因子Ffillfactor的目的是估計部分遮蔽條件下的功率損耗,它是在陰影條件下陣列獲得的最大功率與開路電壓Voc和短路電流Isc的乘積之比。
(4)
式中:Vm和Im分別為陣列在最大功率點處所對應的電壓和電流。
3)功率提升百分比。功率提升百分比Pen%是指重構前后的全局最大功率之差除以重構前全局最大功率的百分比。
(5)
式中:Pmpp,re和Pmpp,TCT分別為重構后和重構前的陣列輸出全局最大功率。
2 基于BES的光伏重構方法
2.1 禿鷹搜索算法
BES是由H.A.Alsattar于2020年提出的一種新型啟發式算法[23],其主要原理是模擬禿鷹尋找食物的行為,具有較強的全局搜索能力。該算法可分為3個部分,即選擇搜索空間、在選定搜索空間內搜索和俯沖。在第一階段,禿鷹選擇獵物最多的空間;在第二階段,禿鷹在選定的空間內移動以搜索獵物;在第三階段,禿鷹從第二階段確定的最佳位置擺動,確定最佳狩獵點并俯沖。BES的3個階段如圖2所示。
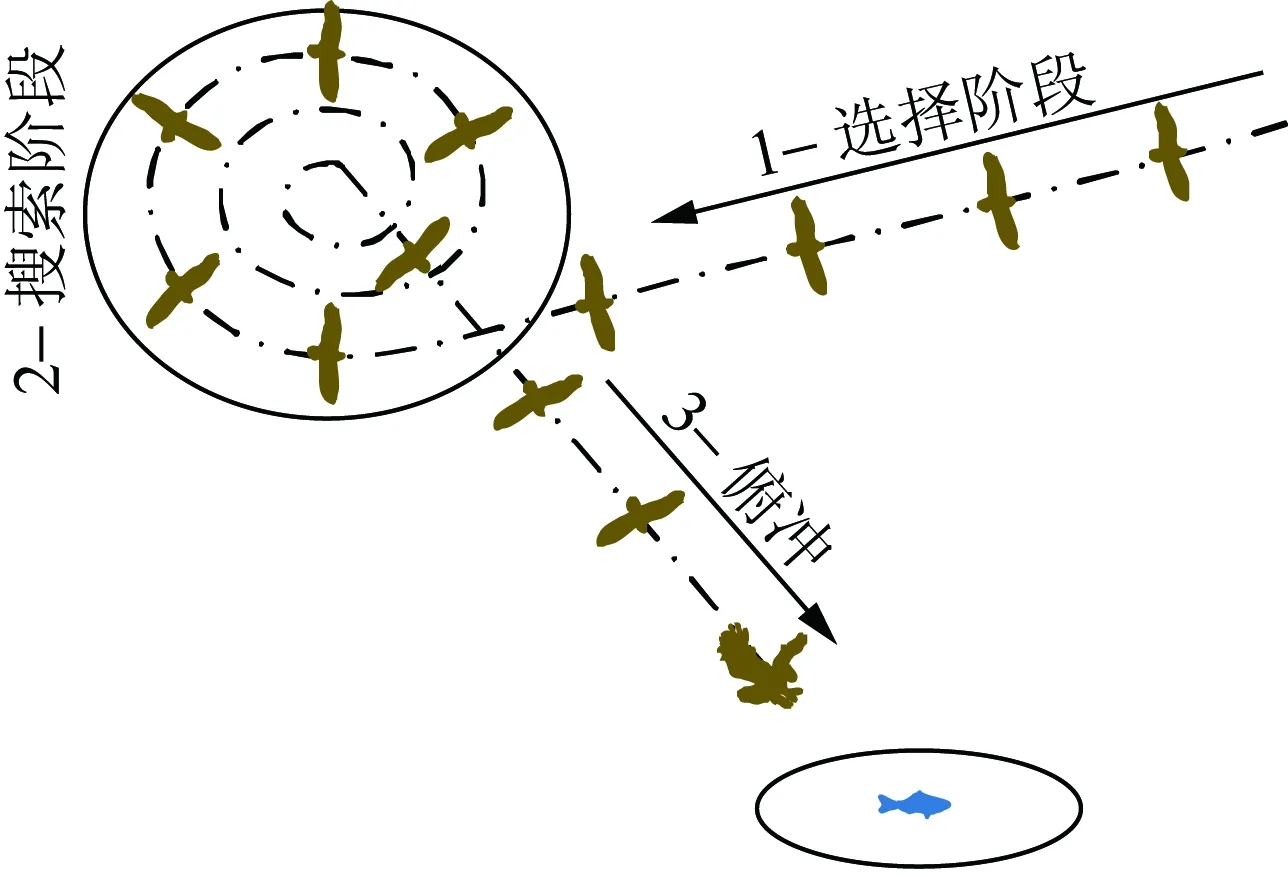
圖2 禿鷹搜索算法的3個階段Fig.2 Three optimization steps of BES
在基于禿鷹搜索算法的光伏陣列重構方法中,一只禿鷹個體代表一個光伏陣列,個體的位置即光伏陣列的電氣排列情況,目標函數為陣列輸出功率的最大化。算法首先收集光伏陣列的電氣參數(如輻照、溫度等),再根據自身機制動態地改變陣列的電氣連接直至算法收斂,輸出光伏陣列的電氣排列最優配置。開關矩陣根據算法輸出的最優配置改變組件間的電氣連接,從而實現了光伏重構。圖3為一種由單刀多擲開關構成的開關矩陣示意圖[18,24]。
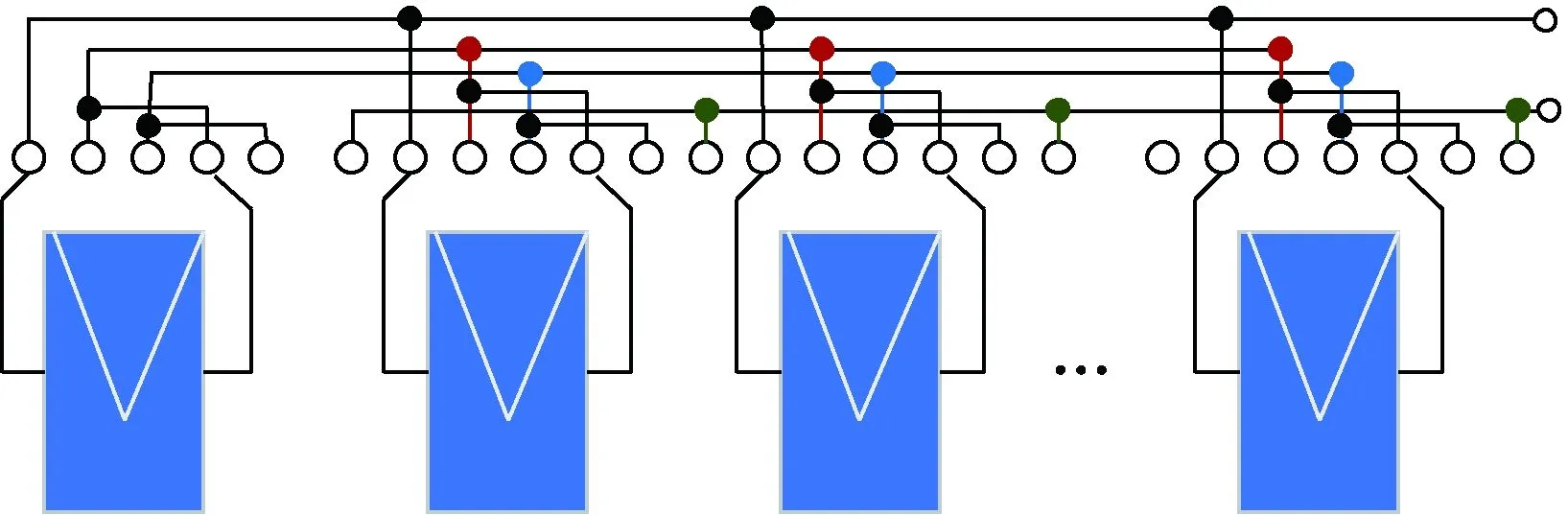
圖3 開關矩陣的結構Fig.3 Structure of a switching matrix
BES的3個階段詳細分析如下:
1)選擇階段。在選擇階段,禿鷹在選定的搜索空間內確定并選擇最佳區域(根據食物量),并在此捕食。
Pnewi=Pbest+α·r(Pmean-Pi)
(6)
式中:Pnewi為第i只禿鷹更新后的位置;α是用于控制禿鷹位置變化的參數,其值介于1.5與2之間;r是介于0和1之間的隨機數;Pbest表示禿鷹當前根據先前搜索中確定的最佳位置選擇的搜索空間;Pmean為前一搜索結束后的禿鷹平均位置;Pi為第i只禿鷹更新前的位置。
2)搜索階段。在搜索階段,禿鷹在選定的搜索空間內搜索獵物,并在螺旋空間內向不同方向移動以加速搜索。俯沖的最佳位置由式(7)表示。
Pnewi=Pi+y(i)·(Pi-Pi+1)+x(i)·(Pi-Pmean)
(7)
(8)
(9)
θ(i)=a·π·rand
(10)
r(i)=θ(i)+R·rand
(11)
式中:a與R代表螺旋形狀變化的參數;a是介于5到10之間的參數,用于確定中心點的點間搜索角;R取值在0.5到2之間,用于確定搜索周期的數量;rand為(0,1)之間的隨機數;x(i)和y(i)表示極坐標中禿鷹的位置,取值均為(-1,1)。
3)俯沖階段。在俯沖階段,禿鷹從搜索空間的最佳位置擺動到目標獵物,所有的點也向最佳點移動。
Pnewi=rand·Pbest+x1(i)·(Pi-c1·Pmean)+
y1(i)·(Pi-c2·Pbest)
(12)
(13)
(14)
θ(i)=a·π·rand
(15)
r(i)=θ(i)
(16)
式中:c1和c2均為介于1和2之間的參數。
2.2 基于禿鷹搜索算法的重構方法
2.2.1 目標函數
為了減少部分遮蔽造成的影響,采用重構的方式來均衡每一列的輻照度,并通過式(17)最大化輸出功率。
(17)
式中:Pmax為輸出功率最大值;Ih和Vh分別為第h行的電壓和電流。
2.2.2 約束條件
光伏重構中,每個組件僅與同一列中的另一個組件交換其行。因此,由電氣開關狀態構成的重構變量應滿足以下約束條件:
(18)
式中:xhc表示第h行第c列的電氣開關狀態。
2.3 執行過程
BES用于光伏重構的流程如圖4所示,BES用于光伏重構的偽碼如表1所示。
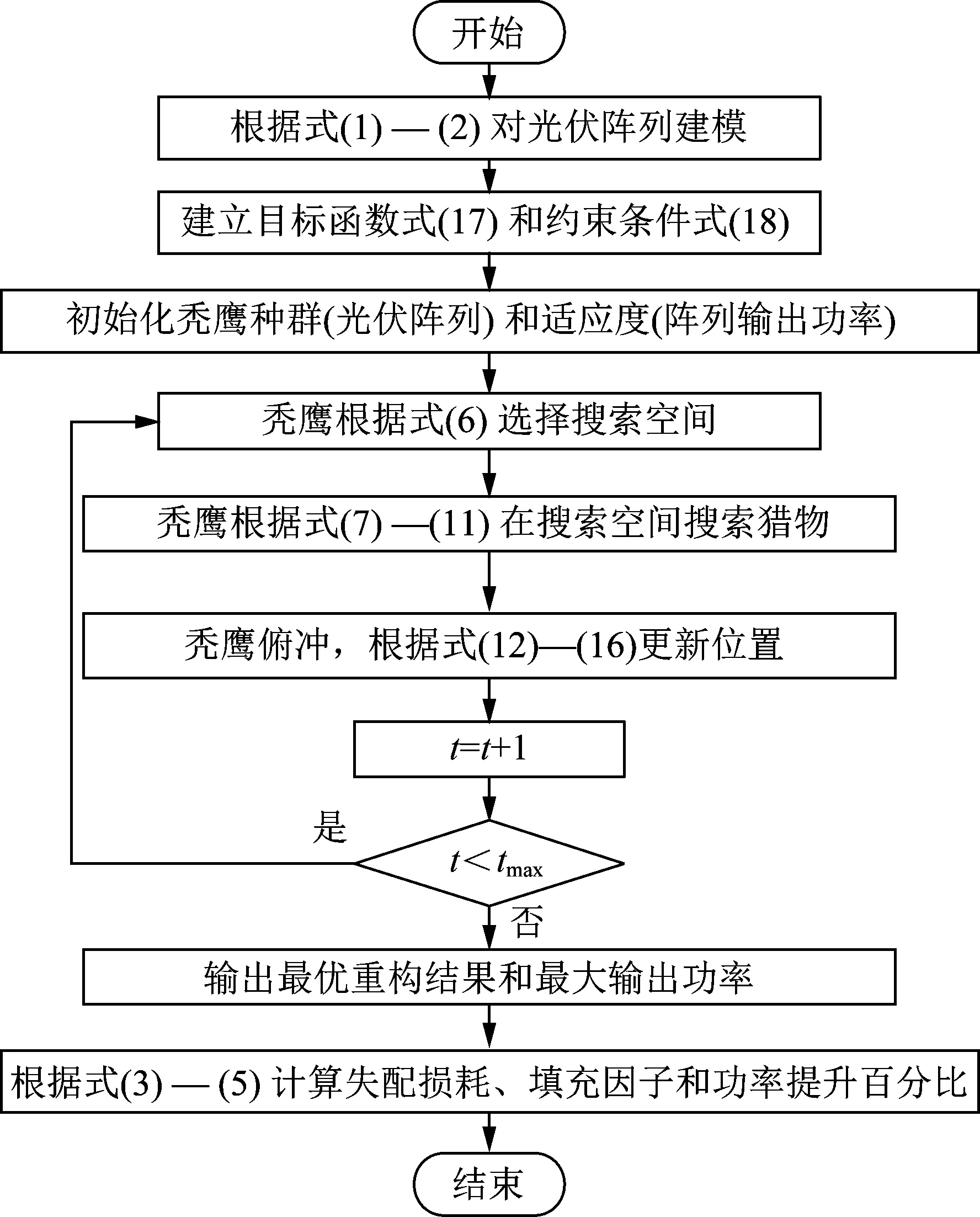
圖4 禿鷹搜索算法用于光伏重構的流程圖Fig.4 Flowchart of BES for PV reconfiguration
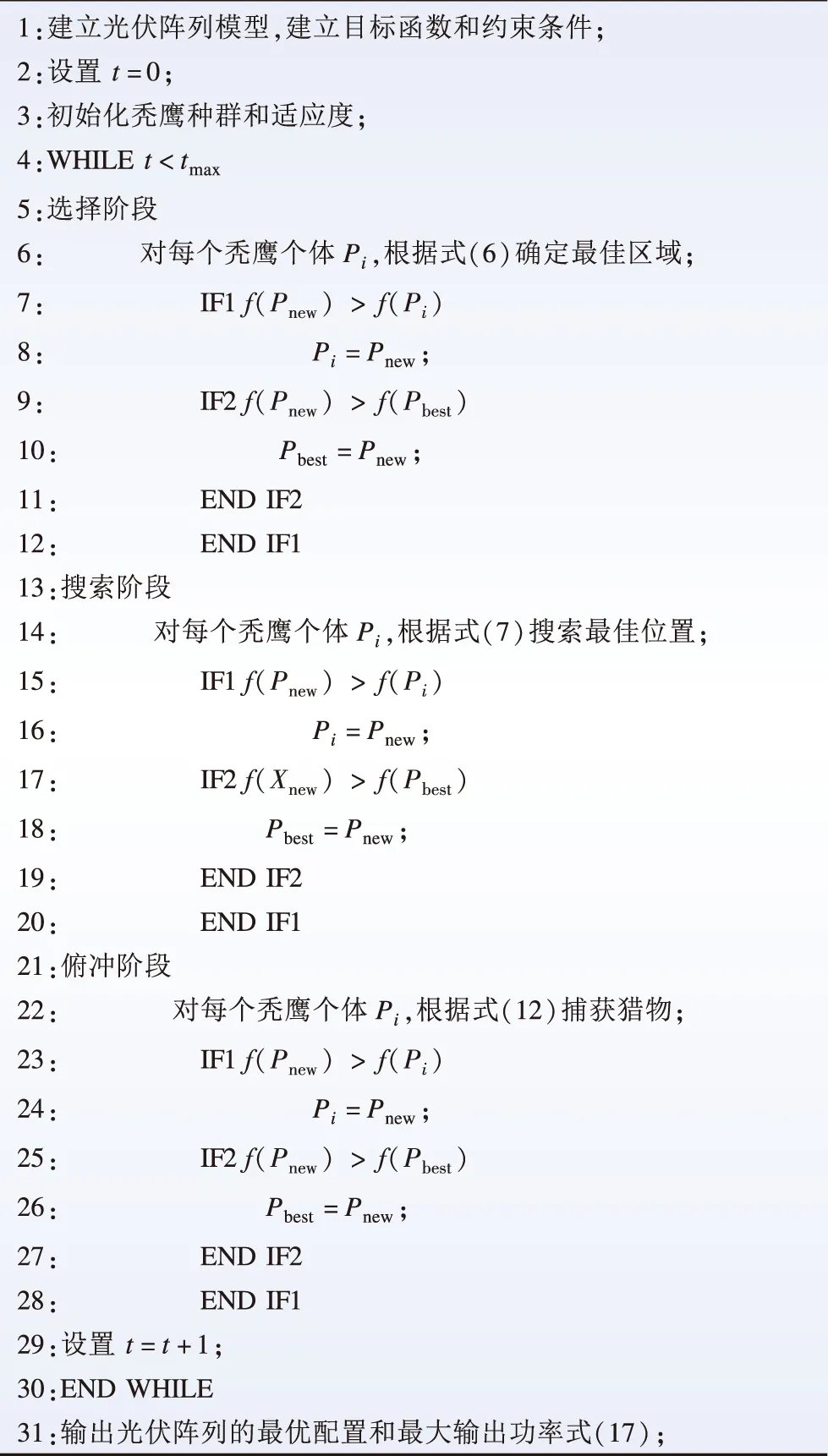
表1 禿鷹搜索算法用于光伏重構的偽碼Table 1 Pseudo code of BES for PV reconfiguration
3 算例分析
在本節中,通過模擬緩慢移動的云在10×10光伏陣列上造成的陰影在10 min內的變化來評估BES的重構性能。同時,將BES與ACO和TS進行比較。為了公平兼顧每個算法,將最大迭代次數tmax和種群規模分別設置為200和25。光伏組件型號為A10 Green Technology A10J-M60-225,其主要參數如表2所示。

表2 光伏組件的主要參數Table 2 Main parameters of PV module
光伏陣列的初始輻照度分布如圖5所示,圖中不同的顏色代表不同的輻照度,組件上的數字分別為組件所代表的行號和列號,這體現了組件的電氣連接順序。
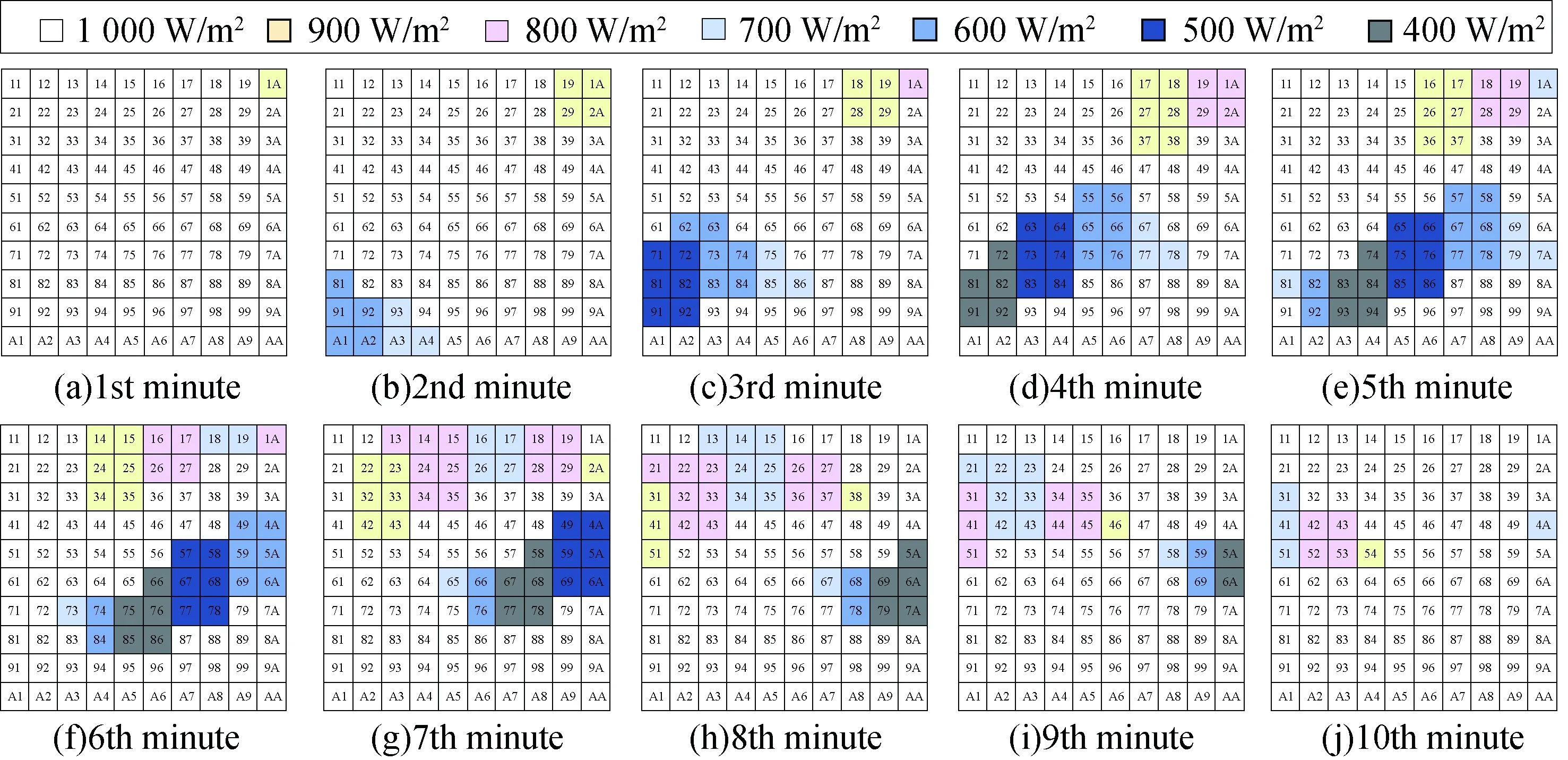
圖5 緩慢移動的云陰影的輻照分布Fig.5 Irradiation distribution of slowly moving clouds
圖6為緩慢移動云層陰影下光伏陣列重構后的電流-電壓(I-V)曲線和P-V曲線。由圖6可以看出,隨著被遮蔽組件的增多,陣列的輸出功率逐漸減少,被BES重構的光伏陣列特性曲線變得平滑,且基本只有一個峰值。
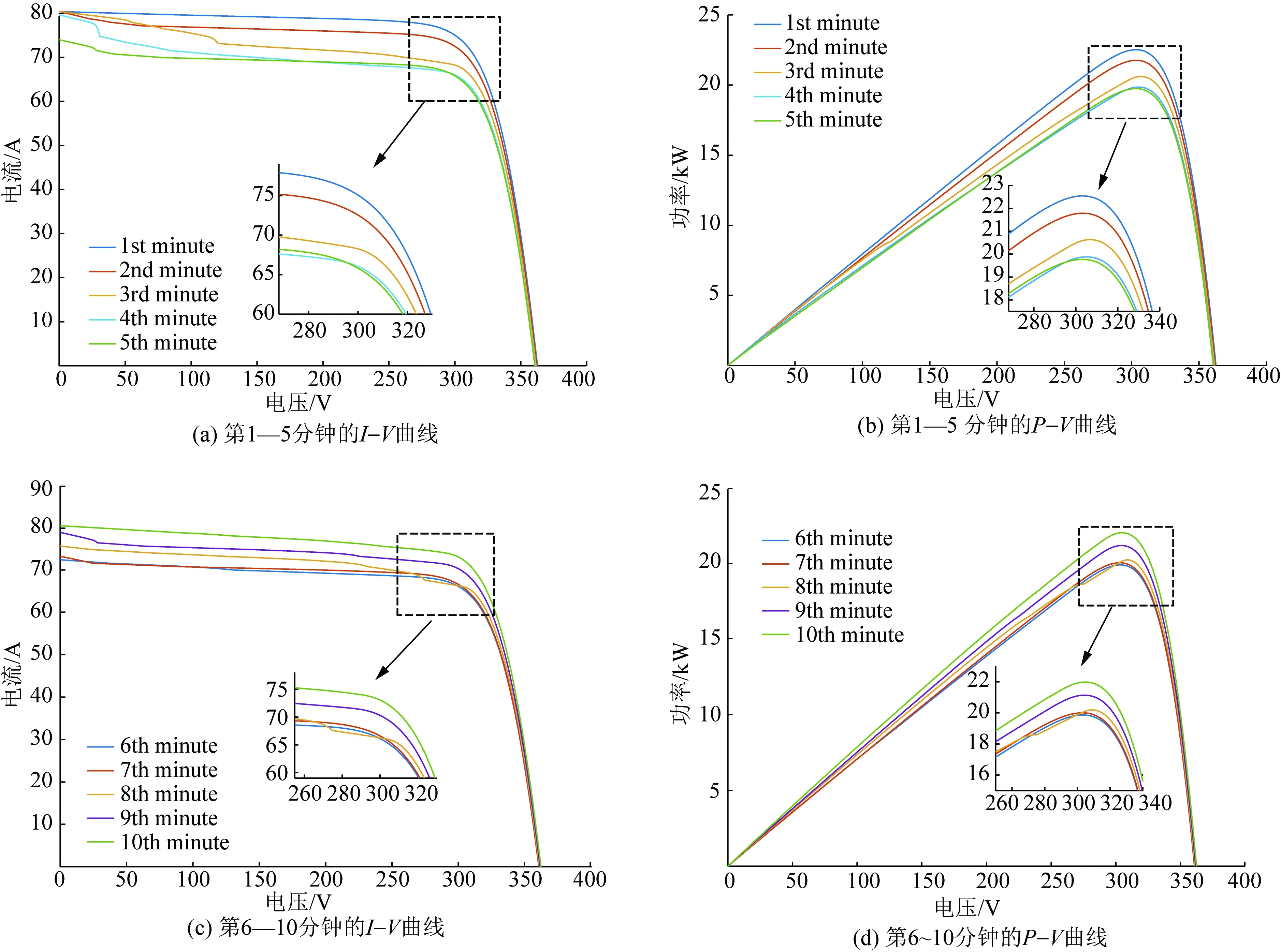
圖6 光伏重構后的I-V曲線和P-V曲線Fig.6 I-V curves and P-V curves with PV reconfiguration
圖7為第5分鐘重構前后的I-V曲線和P-V曲線。由圖7可以看出,重構前光伏陣列的曲線有4個峰值,最大輸出功率在17 kW左右,而重構后變為單峰曲線,最大輸出功率顯著增加(20 kW左右),且BES可以獲得比ACO、TS更高的輸出功率。可以預計,當BES應用到大規模光伏電站中時,可以獲得比其他算法更高的經濟效益。
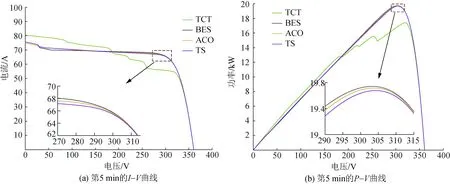
圖7 光伏重構前后第5 min的I-V曲線和P-V曲線Fig.7 I-V curves and P-V curves at the 5th minute with and without PV reconfiguration
重構后的陣列輻照分布如圖8所示。值得注意的是,本文所使用的重構方法是針對TCT配置的光伏陣列設計的,在同一列中,經過光伏重構的組件通過開關矩陣的切換改變了其電氣連接情況,在圖8所示的光伏陣列示意圖中體現為行號的變化以及同一列中代表輻照度的色塊的均勻分散。由圖8可以看出,通過BES重構,同一列的陰影被均勻分散到了不同的行,顯示出較好的重構效果。
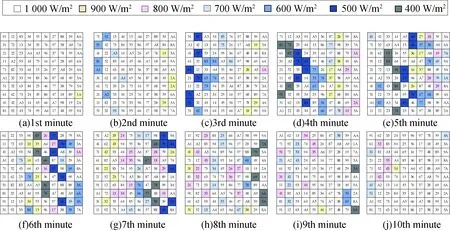
圖8 光伏重構后的光伏陣列最優輻照分布Fig.8 The optimal irradiation distribution of reconfigured PV array
BES、ACO和TS在30次獨立運行中的陣列最大輸出功率Pm、陣列平均輸出功率Pav和標準差如表3所示。BES、ACO和TS單次運行運算時間分別為4.25、1.58、0.61 s。
由表3可以看出,BES的標準差低于TS,表明BES具有較強的穩定性;同時,BES獲得的最大輸出功率均高于ACO和TS,表明BES的尋優能力較強,不易陷入局部最優。
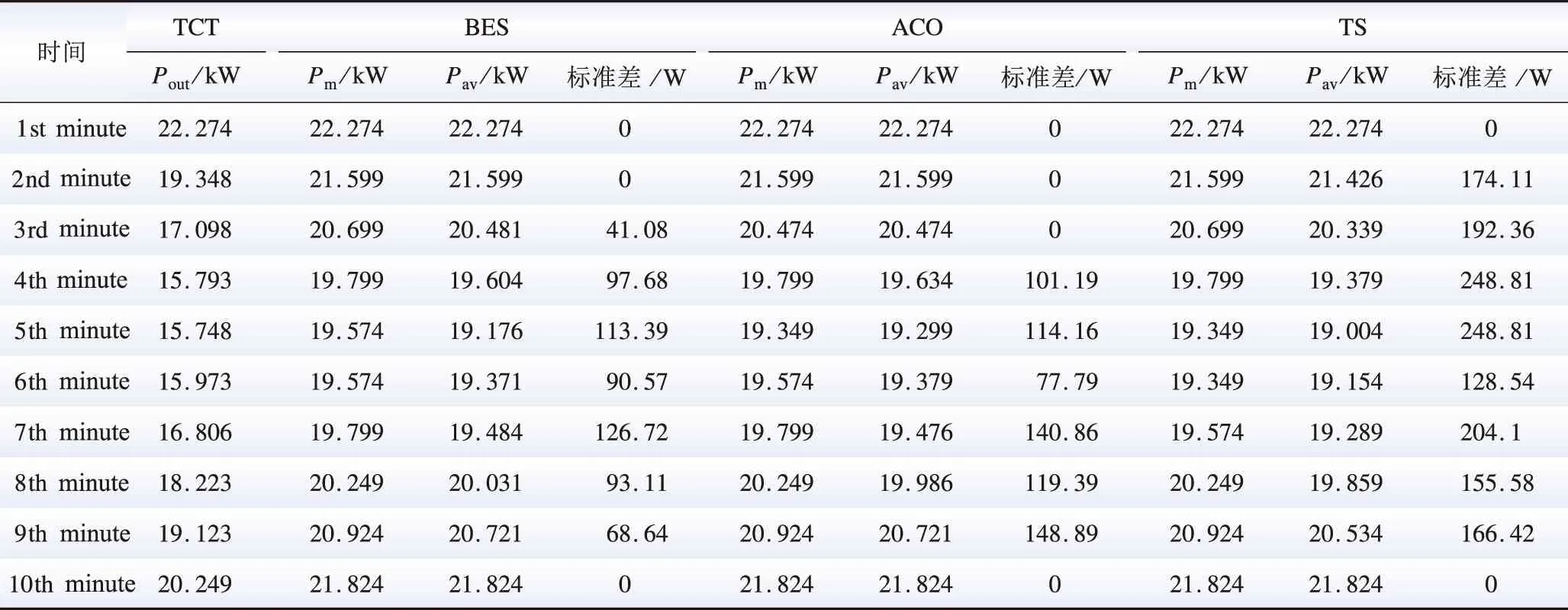
表3 BES、ACO和TS在30次獨立運行中的陣列最大輸出功率、陣列平均輸出功率和標準差Table 3 The maximum output power,average output power and standard deviation of PV array obtained by BES,ACO and TS in 30 independent runs
總計失配損耗PM、平均功率提升百分比Pen%和平均填充因子Ffillfactor如圖9所示。由圖9可以看出,BES獲得最大輸出功率的總計失配損耗為18.671 kW,相較于TCT、ACO和TS分別減少了57.90%,2.37%和3.51%;BES獲得最大輸出功率的功率提升百分比為15.10%,而ACO和TS分別為14.83%和14.68%,均低于BES;BES獲得的填充因子分別為0.714 3和0.708 2。可見,BES的全局搜索能力較強,能獲得高質量的重構結果。
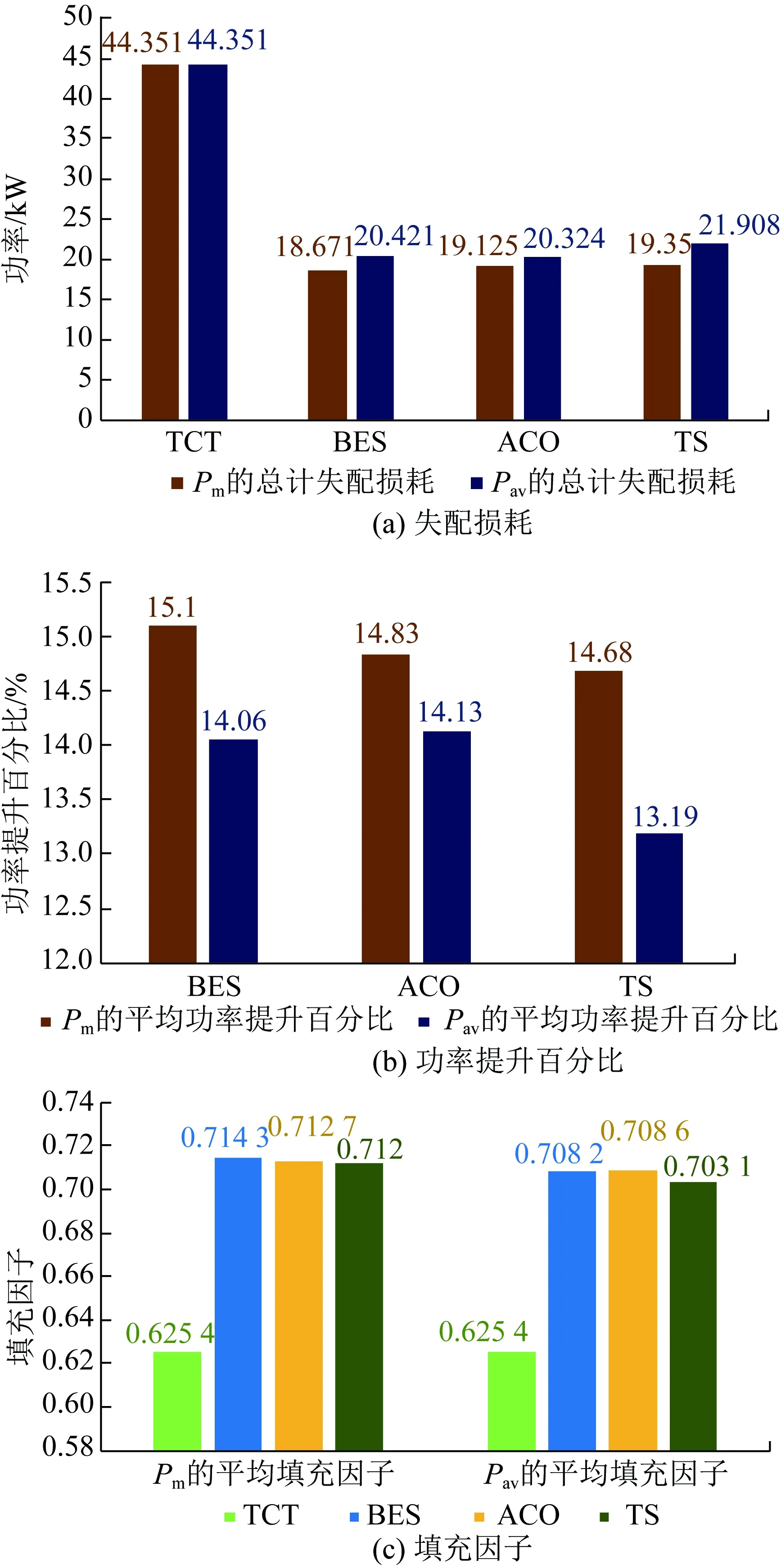
圖9 TCT、BES、ACO和TS的失配損耗、功率提升百分比和填充因子Fig.9 Mismatch loss,power enhancement and filling factor of TCT,BES,ACO,and TS
4 硬件在環實驗
使用MATLAB和RTLAB平臺進行硬件在環實驗,試驗環境如圖10所示。仿真中使用的解法器是ode23,采樣時間為0.01 s。
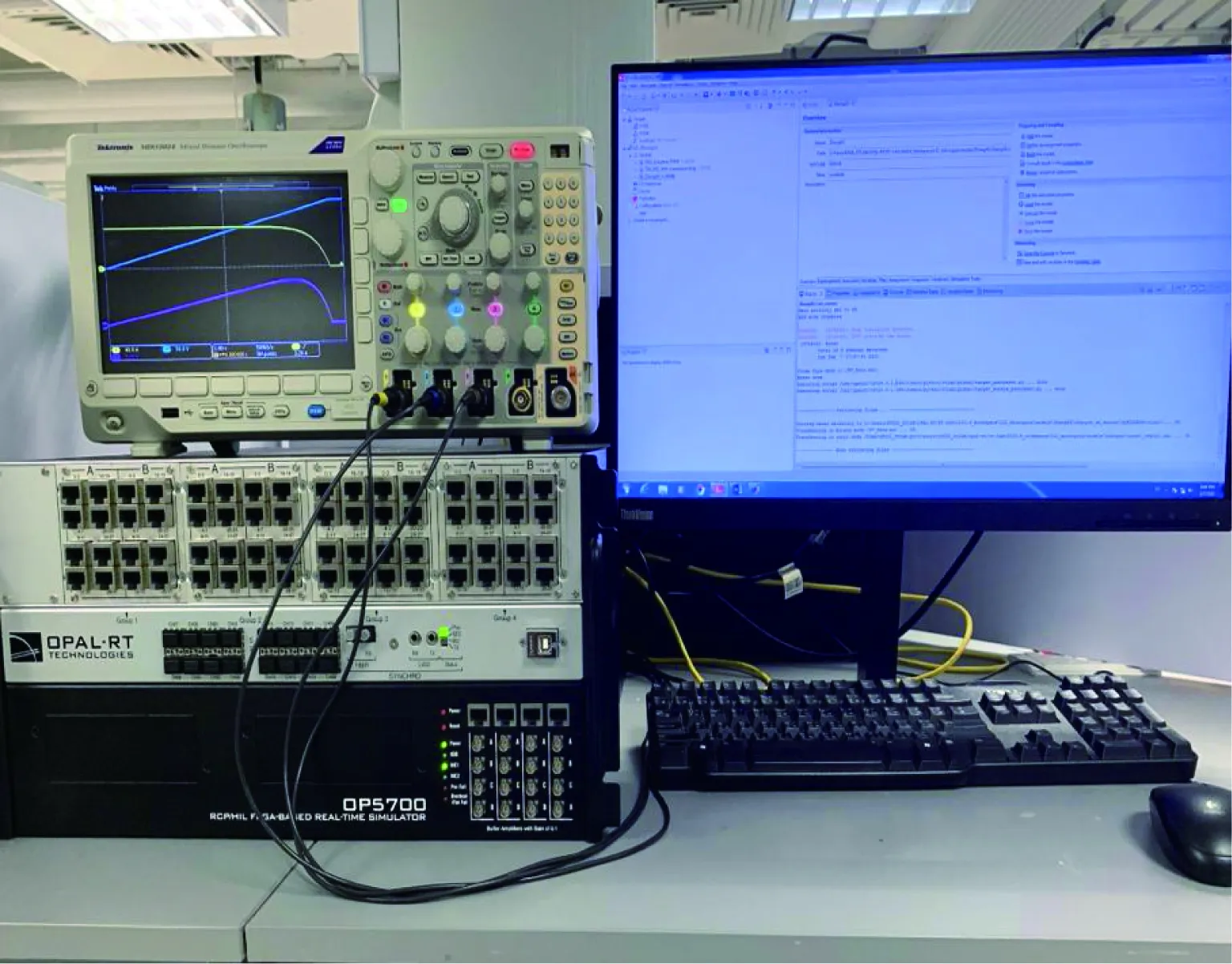
圖10 基于RTLAB平臺的實時硬件在環實驗Fig.10 The RTLAB platform-based real-time hardware-in-loop experiment
實驗獲得的仿真結果如圖11和12所示,圖中G代表輻照度,Tc代表溫度。可以看出,從RTLAB和MATLAB平臺獲得的光伏陣列輸出特性曲線基本吻合。因此,所提方法較為可靠,具有一定的工程可行性。
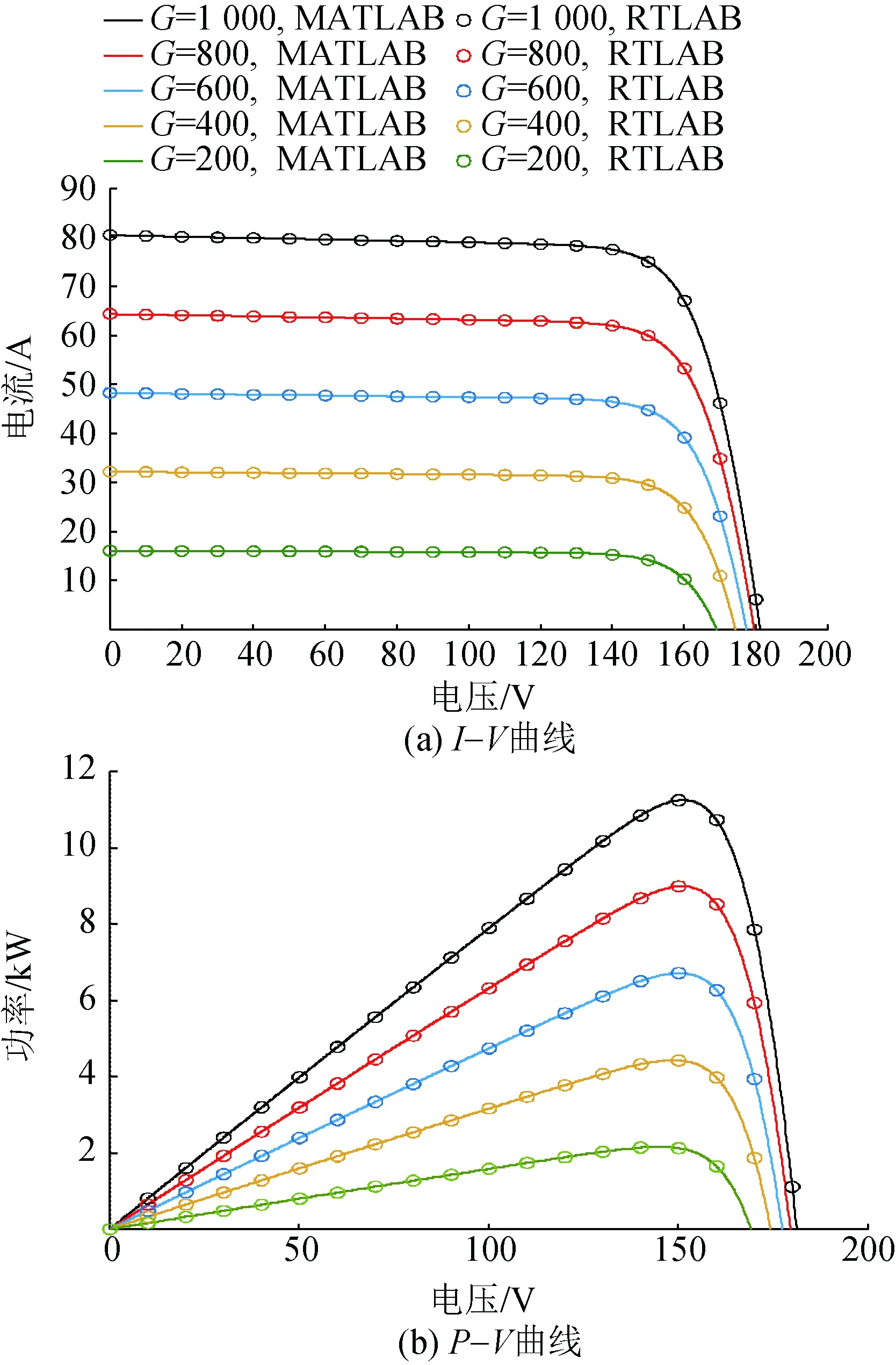
圖11 溫度恒為25 ℃時光伏陣列在不同輻照下的輸出特性曲線Fig.11 Output characteristics curves of PV array under different irradiances when temperature is constant at 25℃
目前絕大多數的以光伏重構為主題的研究論文都是以模擬仿真為主要思路的[25-26],已經陸續有研究人員做出光伏重構的實物實驗,因此光伏重構技術的可行性是可以保證的[27]。
5 結 論
本文提出了一種基于禿鷹搜索算法的光伏陣列重構方法來減輕部分遮蔽的影響。禿鷹優化算法具有較強的全局搜索能力,不易于陷入局部最優,可以很好地重構光伏陣列。
1)與傳統的TCT配置相比,BES、ACO和TS在緩慢移動的云造成的陰影下分別可以提高15.1%、14.83%和14.68%的輸出功率,減少57.90%、56.88%和56.31%的失配損耗,提高14.21%、13.96%和13.85%的填充因子,重構后的P-V曲線為單峰曲線。與ACO與TS相比,BES提高了2.37%和3.51%的輸出功率,有效地緩解了部分遮蔽帶來的影響,具有實用的工程價值。
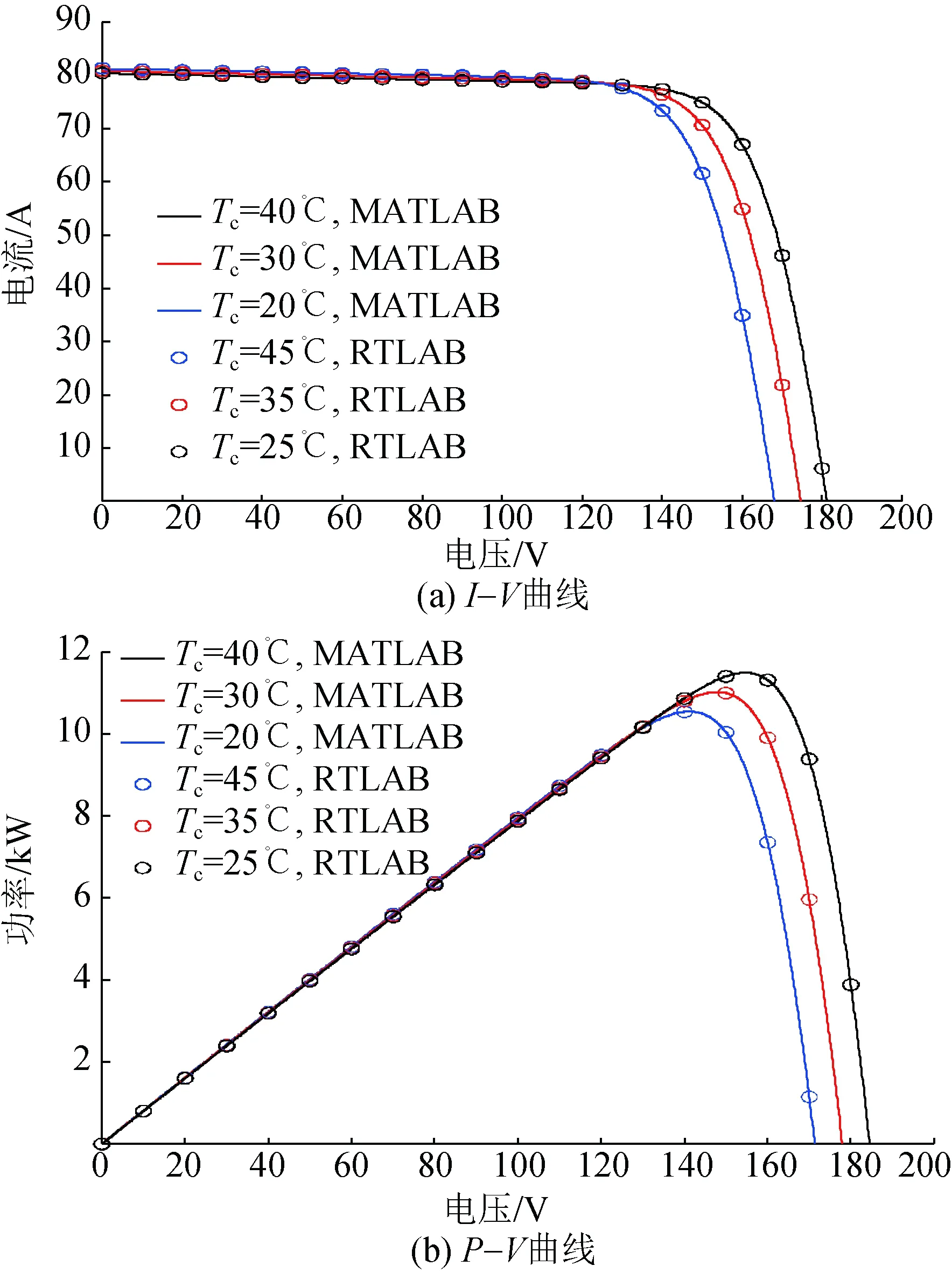
圖12 輻照恒為1 000 W/m2時光伏陣列在不同溫度下的輸出特性曲線Fig.12 Output characteristics curves of PV array under different temperatures when irradiance is constant at 1 000 W/m2
2)BES在30次獨立運行中的輸出功率標準差低于ACO和TS,這說明BES的穩定性更高。而TS最不穩定。
3)BES、ACO和TS單次運行時間分別為1.58、4.25和0.61 s,可見BES的運行速度較快,次于TS,但遠遠優于ACO。
在以后的研究工作中,將會改進基于BES的光伏重構方法,并將BES應用于大型光伏電站中。
