聯合多雷達與ADS-B 的監視數據融合與誤差配準方法
2022-03-24 09:12:04王吉
科技創新與應用 2022年6期
關鍵詞:模型
王 吉
(中國民用航空東北地區空中交通管理局黑龍江分局,黑龍 江哈爾濱 150006)
廣播式自動相關監視ADS-B(Automatic Dependent Surveillance-Broadcast)系統作為獲取、規劃廣播飛機位置、航向和航速等信息的重要載體,精確獲取目標的位置模式和位置信息至關重要。當前,空管自動化系統主要采用單一的雷達處理方式[1]。單個雷達對系統目標的偏移和旋轉相對固定,不會影響系統對目標的跟蹤和相對位置與速度的估計[2-3]。然而,采用多個雷達進行組網監視時,需要融合多個雷達的目標量測信息,融合后的信息在實際中存在系統信息誤差比理論誤差大的問題,導致同一軌跡量測互聯失敗,系統航跡的跟蹤與規劃能力降低[4-6]。
為此,針對多雷達在空域多目標跟蹤中受系統誤差的影響,通過結合當前ADS-B 技術與特點,本文提出自適應交互式多模型濾波的方法,來改善ADS-B 系統在多雷達組網過程中的數據融合和誤差配準。
1 ADS-B 關鍵技術及數據預處理
1.1 ADS-B 關鍵技術
根據DO—242《ADS-B 最低航空系統性能標準》中的最新規定,目前,ADS-B 在民航數據中心主要包含3個方面的信息需求:
(1)導航完好性:利用監視設備能監視區域的數據報告來判斷當前所在容量區域是否達到接收信號的水平。利用容量半徑與導航系統所在精度等級下給出的位置信息之間存在的線性關系,確定兩者之間的偏差。
(2)位置導航不確定:是一種表征水平位置數據的精度和完好性的參數。由水平品質因數和水平保護限制共同決定其能夠被ADS-B 數據雷達監視服務的程度。根據DO—260A 標準規定,通常該指標在正常情況下不低于5。
(3)監視完整性等級:是指在確定導航完好性和位置導航不確定性的情況下,目標位置所在區域超出導航完好性所規定的容量半徑且沒有發生警告的情況下,則進行介入,完善目標監視情況[7]。
1.2 數據預處理
數據預處理通常包括3 個方面:時間配準、坐標變換以及野值剔除。其中,時間配準是將航空檢測系統中不同類型及精度的雷達時間基準進行統一,其中同步天文時間的雷達屬于絕對配準;而相對于各個雷達間的時間同步,保證眾多傳感器信息融合的同步則需要相對配準。由于各個雷達數據參照物選取的不同,數據處理前需要將檢測到的屬于空間極坐標系的數據變換到直角坐標系中,利用旋轉變換和平移變換,統一參考坐標。在經過變換后得到的數據還需要進行野值數據剔除,雷達檢測所獲得的數據有可能會存在嚴重偏離目標值的數據,影響雷達系統坐標信息的誤差估計,通常需要加入濾波算法和模型參數的最優估計算法等,來補償雷達方位角誤差。
2 雷達預處理技術
雷達系統主要由機載應答機和地面詢問機組成。雷達系統通過扇形掃描飛行目標的詢問與詢問應答信號來確定飛行目標的空間三維位置信息并進行數據通信。雷達系統在運行前,需要對地面詢問機進行校時操作,確定目標系統的實際運行時間,并在該時間基礎上進行細分內部計時。通過細分計時可以確定雷達受時模塊與地面詢問機間的通信脈沖頻率,完成通信前校準,如圖1 所示。

圖1 雷達系統與地面詢問機時間校對
在校對時間之后,還需要對接收到的多雷達方位信息進行聯合數據關聯。首先,有效測量多個雷達檢測目標的有效方位信息,并送到數據融合控制中心;其次,劃定統一的坐標系和相應各雷達坐標的變換關系矩陣;最后,通過多雷達數據的聯合算法,得到融合后的航跡濾波結果,并以狀態矩陣和協方差的形式進行表示。
3 自適應交互式多模型濾波方法
卡爾曼濾波算法適用于具體運動狀態的單個運動模型,然而飛機的運動狀態受環境和空間影響相對復雜,采用卡爾曼濾波算法來對目標航跡進行濾波,不能滿足實際航跡規劃的應用需求。交互式多模型(Interacting Multiple Model,IMM)是一種能夠計算多種目標運動狀態,并為對應狀態建立相應運動的模型。當目標在運動過程中發生運動狀態的切換時,可利用馬爾可夫鏈進行數學上運動模型的轉換,并對轉換過程中的模型進行濾波和加權融合。由于目標運動情況的復雜多變,模型之間的轉移沒有確定的形式,因此單一的狀態轉移矩陣進行輸入交互難以達到最優的濾波效果,需要對狀態轉移矩陣進行自適應修正,得到需要的航跡估計如圖2 所示。

圖2 多雷達坐標與ADS-B 聯合觀測模型
對于IMM 算法,利用濾波過程中的濾波殘差和殘差協方差可以確定表征濾波效果的似然函數,其值越大,匹配目標運動狀態的的程度越高,下一次狀態轉移過程中,其他模型向該模型轉移的概率增大,進而通過加強匹配模型的作用,降低不匹配模型的影響,使得自適應修正后的狀態轉移矩陣更加符合目標真實運動情況。自適應IMM 算法流程如圖3 所示。

圖3 自適應IMM 算法流程圖


其中:dj(k)=V(k)-C(k)Xj(k|k-1)為濾波殘差,Dj(k)為殘差協方差矩陣。
相鄰時刻似然函數的變化反映模型j 與目標運動狀態匹配程度的變化,可以用來修正狀態轉移矩陣。定義修正因子為:

根據上述過程即可得到優化的狀態估計值和估計誤差,完成本航跡點的濾波估計。
4 軟件仿真
采用MATLAB 分別對ADS-B 目標真實位置信息與采用交互式自適應濾波后得到的交互式自適應雷達濾波信息進行仿真驗證,如圖4 所示。
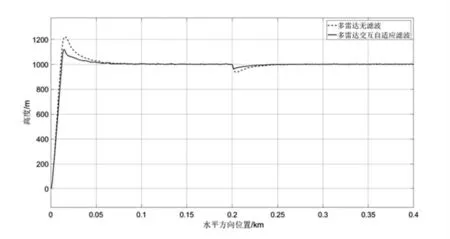
圖4 目標軌跡與雷達濾波軌跡對比
初始馬爾可夫狀態轉移矩陣設置為[0.9,0.1;0.1,0.9]時,從0 位置開始,目標向高度1 000 m 行進,水平方向位置逐漸增加;同時,在水平方向位置為0.2 km 的位置,監測雷達進行切換,由圖4 可以看出,實線是采用基于IMM 算法對目標航跡進行濾波,相比于未進行交互自適應濾波的雷達信號要更接近于高度1 000 m 的位置,其偏差要小于未進行交互自適應濾波算法,更好地監測和跟蹤目標位置。
表1 和表2 給出了IMM 算法和Kalman 算法下的多雷達系統誤差估計結果和觀測配準均方根誤差,可以看出采用IMM 算法得到補償后的多雷達觀測誤差要小于未補償的雷達觀測誤差。當聯合多雷達的ADS-B 在采樣時刻得到的數據不精確時,IMM 算法能夠有效估計雷達系統誤差。

表1 多雷達系統誤差估計結果
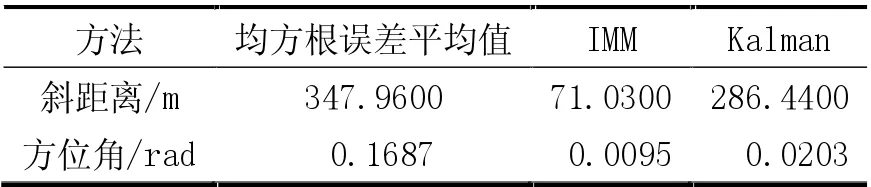
表2 多雷達觀測配準均方根誤差
5 結束語
本文首先介紹了ADS-B 系統與多雷達預處理的關鍵技術,針對單一濾波算法以及應用多雷達組網監視系統的數據融合誤差問題,提出了交互式多模型算法,通過仿真對狀態轉移矩陣的自適應濾波修正,仿真結果表明所提算法比傳統濾波算法的濾波精度更高,航跡信息更準確。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19