模糊PID 控制在水肥一體機肥料原液混合系統中的應用
2022-03-24 09:12:04魏顯文孫國亮
科技創新與應用 2022年6期
魏顯文,孫國亮,魏 堃,楊 超
(武威職業學院,甘肅 武威 733000)
常見的水肥一體機在配制肥料原液時多為手控配液、機械配液,即利用單片機、PLC 控制流量閥的開度,進行液體按比例配制,效率低下。PID 控制器有效解決了手控和機械配液效率低的問題,配比精度也有所提高。但在實際生產現場中,灌溉肥水需求的濃度不固定,由于參數整定復雜,常規PID 控制器往往會出現參數設置不佳、控制精度不高,對實際生產的適應力較差,已經難以滿足更高精度要求,且難以實現實時控制。
基于此,本文將模糊PID 控制算法應用于水肥一體機肥料原液混合系統中,旨在有效解決以上問題,且該系統能有效避免流量閥開度差異過大引起的混合液比例失調。
1 灌溉肥水配制系統的工作原理
肥水的配制以水溶肥A、水溶肥B 和水為原料,按照用戶實際所需要的比例濃度進行攪拌,并實時檢測混合液的酸堿度,加入少量的酸液,保證肥水的酸堿度達到灌溉用水的標準。為了適應不同用戶對于肥水的不同需求,本系統在上位機設置可以按照不同品種、不同比例進行配制。在配制過程中,2 種水溶肥用濃度比的方式計量,若濃度比發生偏差,則以水溶肥A 的流量為標準,通過改變水溶肥B 的流量來調節2 種成分的濃度比。
混液裝置主要由濃度檢測變送單元、比較環節、模糊PID 控制系統和流量閥組成。系統中需要控制的變量為混合液中成分A、成分B 濃度的比值,其控制流程如圖1所示。首先由濃度檢測變送單元檢測出2 種成分的濃度,并轉換為濃度比,送入比較環節。比較環節內實現濃度比與設定值比較后求出偏差和變化率,再將二者送入模糊推理環節,經模糊推理后實時整定PID 參數,PID 控制器控制執行機構調節流量閥B 的開度,使2 種成分的濃度比盡快達到并穩定在設定值。
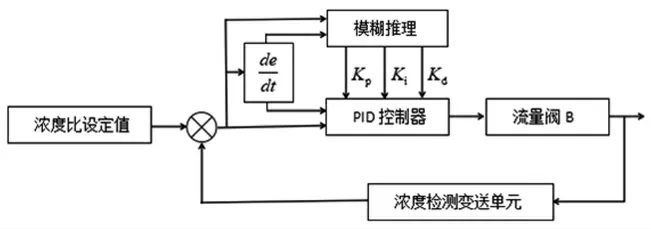
圖1 肥料原液混合控制系統
常規PID 離散控制算法:

式中Kp、Ki、Kd分別為比例增益、積分增益、微分增益,加入模糊推理環節后,3 個值將不再固定,而是能夠根據濃度比的變化和變化率實時自動調整,即3 個值變為Kp+ΔKp、Ki+ΔKi、Kd+ΔKd。
2 肥水配制模糊PID 控制過程
首先濃度檢測變送單元會檢測到2 種成分的濃度比,經過比較環節得到與設定的濃度比的偏差e,以及當前偏差和上一時刻偏差的變化ec,即偏差變化率。例如設定成分A 與成分B 的濃度比為2∶1,此時檢測到濃度比為2.2∶1,而上一時刻濃度比為2.3∶1,則e 為0.2,ec為2.3-2.2=0.1。
2.1 變量模糊化
以e 為例,檢測到的濃度比是有范圍的,即濃度比與設定值偏差在一個區間內,設該系統中濃度偏差范圍為±0.6,因此將偏差e 量化于[-0.6,+0.6]區域內。允許的濃度偏差變化率范圍為±0.15,將其量化于[-0.15,+0.15]區域內。將二者變換至模糊集論域[-3,-2,-1,0,1,2,3],根據需要將其一一對應為“負大(NB)”“負中(NM)”“負小(NS)”“零(ZO)”“正小(PS)”“正中(PM)”“正大(PB)”7個等級,對應的模糊控制規則見表1。
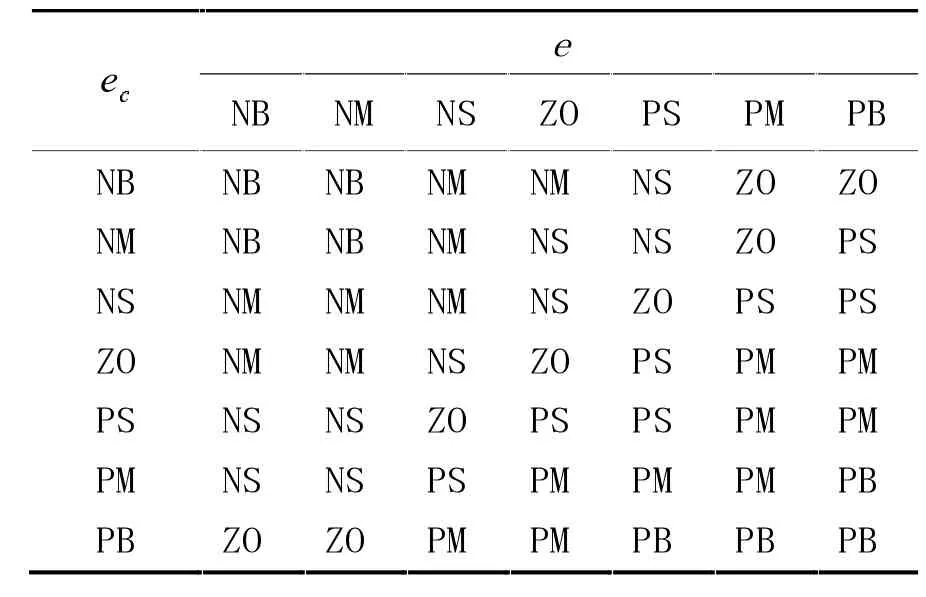
表1 模糊控制規則表
2.2 確定控制規則
根據表1,可以歸納出49 條控制邏輯規則,均由生產及工程技術人員總結和實踐操作經驗得出。如:IF(e is NB)and(ecis NM)then(ΔKpis PB)(ΔKiis NB)(ΔKdis NS),其含義為如果偏差為負大,偏差變化率為負中,為盡快消除負偏差,比例增益變化應取正大,積分增益變化應取負大。同時,因偏差變化呈負增長趨勢,微分增益變化應適當取負小,防止偏差變化過快導致正向偏差,最終能到到新的增益分別為Kp+ΔKp、Ki+ΔKi、Kd+ΔKd。
又如:IF(e is ZO)and(ecis PB)then(ΔKpis NM)(ΔKiis PM)(ΔKdis ZO),其含義為如果偏差和偏差變化率分別為零、正大,則對應的ΔKp、ΔKi、ΔKd分別為正大、正中、零,其余47 條規則不再一一闡述。
2.3 解模糊化
以上PID 參數的修正值是通過模糊推理得到的,即ΔKp、ΔKi、ΔKd仍為對應的等級,必須將其轉化為數字量才能與原有增益相加得到新的增益,該過程就為解模糊化過程。本系統中采用工業控制中廣泛應用的加權平均法,根據上述方法,利用Simulink 仿真得到ΔKp、ΔKi、ΔKd的模糊查詢表,通過查表得到ΔKp、ΔKi、ΔKd的數字量就可以對Kp、Ki、Kd進行修正。該過程是1 個動態過程,調節過程中若偏差和偏差變化率發生新的變化,3 項增益也會實時調整,達到最優控制效果。
3 Simulink 仿真與結論
為了簡化整個仿真過程,我們將水溶肥A 對應的流量閥A 設定為1,通過改變調節閥B 的開度,來控制2 種水溶肥的流量,從而改變混合液中2 種成分的濃度。水溶肥B 的流量與流量閥B 開度有關,其開度不同,流速不同,溶液中成分A、B 濃度就不同。本系統中將流量閥B等效為一階慣性環節,其傳遞函數為:

其中,K 為流量閥B 增量;T 為流量閥B 的時間常量。若考慮到該系統存在滯后,設其滯后時間為τ,此時傳遞函數變為:

該仿真模型中取K=2,T=2,τ=3 s。其輸入為2 種成分的濃度比,通過模糊PID 控制,調節流量閥B 的開度,輸出為2 種成分的實際濃度比,經反饋環節與設定值比較,通過模糊控制實時調整PID 控制環節的參數,使實際濃度比快速達到設定值。在仿真模型中加入Uniform Random Number 模塊,模擬實際生產中存在的雜質影響、檢測誤差等系統干擾。
假設當前輸入為2.0,兩種方式控制效果如圖2 所示。可明顯看出,采用模糊PID 控制,超調量為5%左右,而常規PID 控制的超調量為35%,且存在明顯振蕩; 采用模糊PID 控制,其調節時間為3 s,比常規PID 控制快了接近3 s;在10 s 時間內,常規PID 控制系統最終達到的流量比約為1.98,未能達到設定值2.0。
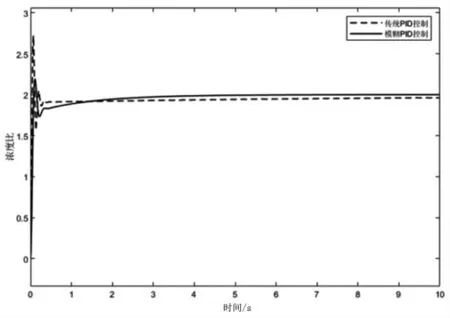
圖2 模糊PID 和常規PID 控制效果對比
假如改變濃度比的設定值為1.5 和2.5,再次進行仿真,模糊PID 的控制效果對比如圖3 所示。可以看出,隨著濃度比設定值的增大,仿真結果超調量也變大,調節時間也變長,但不管哪一種濃度比,模糊PID 控制總能達到控制要求且系統穩定性良好。

圖3 不同濃度比設定值下的仿真效果對比
綜上所述,在水肥一體機中使用模糊PID 控制,能夠使肥水達到精確的濃度比,且配制時間短,配置過程中濃度不會出現大幅跳變。此外,需要配制不同濃度的肥水時,常規PID 控制除改變濃度比設定值外,為達到好的控制效果,還需要重新整定參數,比較繁瑣,而模糊PID 控制只需要改變設定值,相關參數經模糊推理過程會自行達到最佳,比較簡潔。因此,模糊PID 控制在水肥一體機肥水配制中具有較強的應用價值。