艦載無人直升機著艦時機判定及復飛程序研究
2022-03-24 09:12:04謝欣宏
科技創(chuàng)新與應用 2022年6期
關鍵詞:環(huán)境
謝欣宏
(中國飛行試驗研究院飛機所,陜西 西安 710089)
艦載無人直升機由于低成本、零傷亡,良好的低空/超低空飛行能力,以及對起降環(huán)境較小的依存性等諸多優(yōu)勢,從其出現(xiàn)之初便被應用于偵察探測、通信中繼和海上反潛等多個作戰(zhàn)環(huán)節(jié)[1]。美QH50 系列艦載無人直升機作為最早投入應用的軍用無人直升機,出現(xiàn)于20 世紀50 年代,是早期遙控式艦載無人直升機的典型代表。隨后,多國的海軍部門均高度重視艦載無人直升機的發(fā)展,研制并衍生出了眾多的型號,典型型號有美火力偵察兵系列;奧地利坎姆考普特(Comcopter)系列;俄羅斯Ka137多用途無人直升機等[2](圖1)。

圖1 艦載無人直升機艦面起降示意圖
同有人直升機相似的是,艦面起降過程中會面臨由于海上嚴苛氣象環(huán)境、艦面復雜流場環(huán)境、起降區(qū)域受限等客觀條件引發(fā)的問題和挑戰(zhàn)。作為無人化裝備,缺乏有人機艦面起降作業(yè)時飛行機組與塔臺指揮之間暢通有效地溝通,其艦面自動起降能否可靠施行在很大程度上取決著艦時機的選擇,而如何有效地選擇著艦時機與艦-機各系統(tǒng)間的信息交互能力、著艦引導設備及助降裝置的功能性能、著艦過程中控制邏輯的合理性等要素密切相關。
綜合以上因素,無人直升機的艦面自動起降過程中對著艦時機的判定,面臨的是技術復雜、難度大、風險高的特點,需綜合分析影響著艦的若干關鍵因素,得出無人直升機著艦時機判定,的核心要素,并制定無法著艦時能有效規(guī)避風險的復飛程序,保障后續(xù)艦載無人直升機型號進行艦基試飛順利開展,提升裝備在作戰(zhàn)應用中的效能。
1 無人直升機艦面起降影響因素分析
無人直升機,與有人直升機艦面起降相比,其影響因素有共性的部分,也有其獨有的特殊性的部分。在載艦幾何特性、直升機自身氣動及操縱性、艦面流場特性和載艦非線性運動狀態(tài)等方面,無人直升機艦面起降過程中面臨著同樣的挑戰(zhàn),而由于無人技術的應用,有效規(guī)避了與飛行員相關的人員舒適程度、駕駛目視感受等因素,但新技術的應用也引入了著艦引導精度、著艦控制策略合理性、起降環(huán)境感知準確性和電磁敏感性等影響因素。
1.1 有人/無人艦載直升機共性影響因素
1.1.1 艦面流場特性
直升機載艦的上層建筑復雜多樣,在著艦平臺前方或單側(cè)一般均布置有長方體機庫或艦島,其表面為面積較大的長方形平面,且各面的交接處多為較為尖銳的直角。上層建筑的垂直面會導致氣流在著艦平臺上方較大的范圍內(nèi)進行循環(huán)流動,產(chǎn)生渦流區(qū)[3]。另外,載艦的桅桿等其他上層建筑,以及艦身上較為尖銳的轉(zhuǎn)角等也會在著艦平臺上方產(chǎn)生高度擾動的氣流。
為評估艦面流場特性對直升機艦面飛行、氣動特性的影響,開展CFD 計算工作,對一定艦橋合成風速、風向條件下載艦著艦平臺上方的流場特性進行評估分析。圖2 所示為典型艦橋合成風速、風向條件下,某型兩棲登陸艦CFD 流場計算結(jié)果。
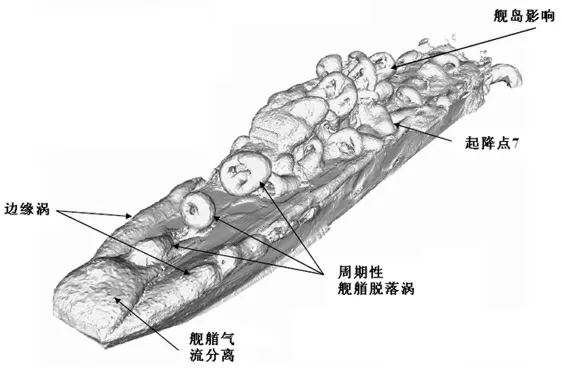
圖2 某大型艦船流場CFD 計算結(jié)果示意圖
分析上述結(jié)果,并綜合考慮國內(nèi)外其他相關研究結(jié)果,可以發(fā)現(xiàn)以下幾點規(guī)律:
(1)在著艦平臺上方,直升機主旋翼受到明顯的下洗流場干擾,使直升機處于類似爬升的啟動狀態(tài)。
(2)相較于一定相對風速風向的穩(wěn)定飛行狀態(tài),在著艦平臺上方及其周邊橫向氣流擾動明顯,改變了直升機的操縱需求。
(3)可預見隨著艦橋合成風速的增大,載艦著艦平臺上方的氣流擾動也越發(fā)顯著。
1.1.2 載艦幾何特性
直升機艦上起降(作業(yè))平臺面積狹小,且周圍有較多的障礙物,艦面作業(yè)空間條件較為惡劣[4]。以美海軍斯普魯恩斯級驅(qū)逐艦為例,其滿載排水量達8 040 t,已經(jīng)是一種較大噸位的海軍艦船了,但其直升機起降平臺僅為長約21 m、寬約12.5 m 的平臺。在極端情況下,SH-60B 直升機在該型艦上著艦時,其槳尖距離最近的上層建筑的最小距離僅有1.2 m,或者其尾起距離著艦平臺的后緣的最小距離僅有0.76 m。
1.1.3 載艦非線性動態(tài)運動
直升機艦面作業(yè)也受到載艦運動情況的影響。載艦的運動特性主要由艦身幾何尺寸、裝載情況、載艦自身的艦速/艦向和海況條件等因素確定。大部分直升機的飛行手冊中均給出了直升機斜坡著陸的坡度限制,類似地,直升機艦面起降時載艦的縱、橫搖角度限制主要受到結(jié)構(gòu)完整性、操縱以及起落架剎車能力等因素的影響,在制定艦載直升機艦面起降包線時,需給出載艦縱、橫搖角度等姿態(tài)限制。
1.2 無人直升機著艦影響因素特性
1.2.1 著艦引導精度
著艦引導是無人直升機從目標作業(yè)海域按照返航航線飛抵載艦附近機艦交會點后,按照下滑進近,懸停跟進、上艦的步驟逐步逼近著艦點的過程[5]。在此過程中需要精確測量無人機的位置,精確控制無人機的軌跡,因此,解決好在搖擺平臺上的準確測距、測角和定位問題,實現(xiàn)高精度的著艦引導關系到無人直升機能否按照預先設定的航線到達指定位置。現(xiàn)在常用的引導方式主要有雷達引導和差分衛(wèi)星,通過在載艦上安裝引導雷達或衛(wèi)星基站與無人機進行相對位置、位置偏差等信息的交互,實現(xiàn)高精度引導,但都在一定程度上存在受到電磁干擾導致精度降低的情況。
1.2.2 起降環(huán)境感知準確性
無人直升機系統(tǒng)的起降環(huán)境感知包括兩個部分,一是由安裝在無人直升機平臺上的激光雷達、無線電高度表和若干環(huán)境感知傳感器等設備主動進行環(huán)境探測獲取的著艦環(huán)境信息,提取出可利用的特征信息對無人直升機進行導航;二是接收來自載艦的艦船運動信息,對信息進行融合處理,實現(xiàn)對艦船甲板的運動姿態(tài)的實時準確預估,確保無人直升機在艦船靜息期快速著艦[6]。
其中對于靜息期的判定是環(huán)境感知中的核心環(huán)節(jié),靜息期的概念可以進行如下定義:在高海況下,視風浪引起的艦船甲板運動為一平穩(wěn)隨機過程,在4~20 s 的海浪統(tǒng)計周期內(nèi),存在一個或多個時間段使得艦船六自由度運動滿足一定的閾值,在該閾值范圍內(nèi)無人直升機可進行安全起降[7]。
1.2.3 著艦控制策略合理性
著艦的過程是無人直升機自動起降全過程中的末端也是最為核心、風險最為集中的一環(huán),無人直升機完成下滑進近轉(zhuǎn)入懸停跟進后就進入到了著艦階段的關鍵環(huán)節(jié)。在著艦過程中,飛控系統(tǒng)需要實時判別來自環(huán)境感知模塊的相對位置信息、艦船運動狀態(tài)信息,以做出下一步動作的指令。因此,著艦階段控制策略的制定,尤其是與著艦位置及著艦可接受載艦運動相關的判據(jù)的設定就十分重要,滿足判據(jù)要求則按照跟進上艦、高位懸停檢查、低位懸停檢查及快速著艦的過程完成著艦,若該過程中存在某一環(huán)節(jié)判據(jù)不滿足,則進入復飛程序。
1.2.4 電磁敏感性
艦面環(huán)境在狹小的空間內(nèi),高度集中地布置了多種雷達系統(tǒng)、電子設備和武器系統(tǒng)以及電磁干擾系統(tǒng),電磁環(huán)境復雜。無人直升機系統(tǒng)的正常運行,高度依賴鏈路間的信息傳輸,復雜的電磁環(huán)境可能會導致鏈路信號不穩(wěn)定,一些較強的電磁脈沖干擾甚至可能造成機上電子元器件的損壞,導致安全事故。
2 基于典型著艦引導飛行剖面的著艦時機判定準則
2.1 艦載無人直升機典型著艦飛行剖面
通常艦載無人直升機的自主著艦過程包括下滑進近、懸停跟進、快速下降著艦3 個階段。
(1)下滑進近:無人直升機返航抵達機艦交匯點后,根據(jù)當前采集到的艦船航向、航速及相對位置信息,規(guī)劃一條理想的下滑軌跡,導引無人直升機至艦船尾部,與艦船保持一定的相對距離和相對速度。
(2)懸停跟進:如圖3(a)所示,無人直升機進行自身位置、速度及航向的調(diào)整以保持與艦船同步,根據(jù)設定的航跡導引無人直升機移動至艦船著艦點上方。
(3)快速下降著艦:如圖3(b)所示,導引無人直升機進行穩(wěn)定下降,到達安全高度后,捕捉理想著艦時機。當捕捉到理想著艦時機后,控制無人直升機快速下降完成著艦。
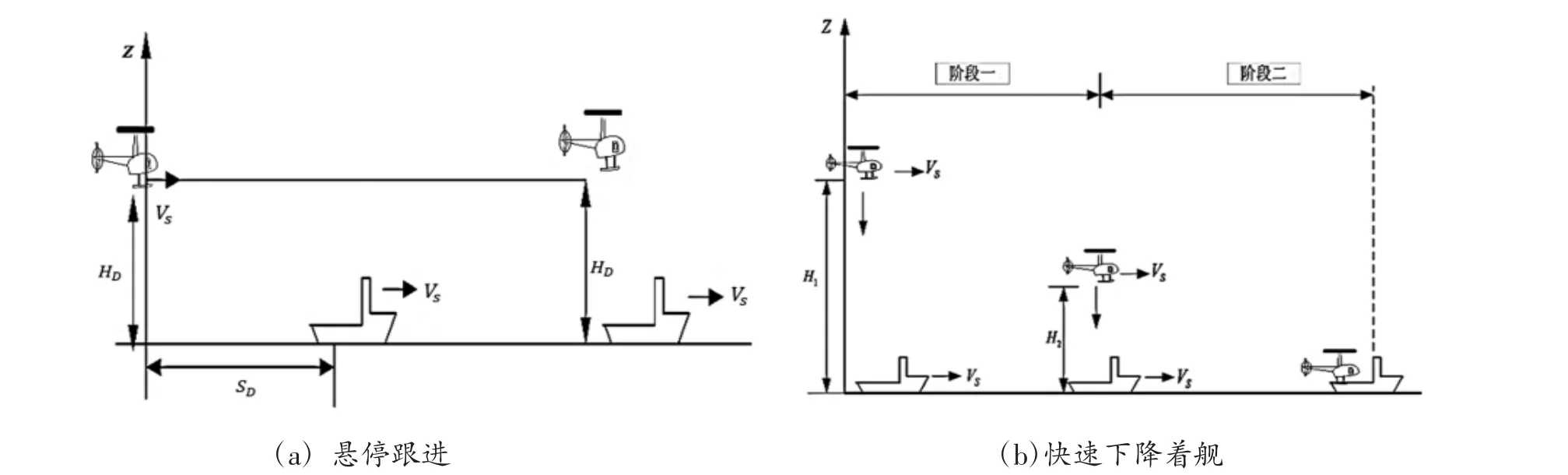
圖3 無人直升機典型著艦過程示意圖
2.2 著艦時機判定準則
無人直升機從懸停跟進至起降位上方懸停起,便進入了著艦時機判定的階段。如圖4 所示,當無人直升機在起降位上方懸停時,來源于機載傳感器或載艦相關信息源包含載艦運動狀態(tài)、無人機平臺各系統(tǒng)工作狀態(tài)、艦面環(huán)境等信息都傳遞到無人直升機信息融合系統(tǒng)中支撐飛控系統(tǒng)進行著艦時機的判定,基于無人直升機典型著艦飛行剖面,結(jié)合前文對無人直升機著艦影響因素的分析,提出包括3 個主要部分的著艦時機判定準則如下:
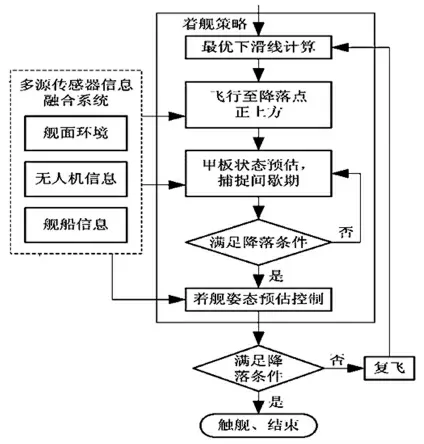
圖4 無人直升機著艦時機判定邏輯框圖
(1)無人機平臺各系統(tǒng)工作狀態(tài):
a. 發(fā)動機扭矩、發(fā)動機T45 溫度等發(fā)動機狀態(tài)參數(shù)是否具備合理安全余量,通常余量不小于10%。
粒子群算法是模仿鳥類的覓食行為,從隨機解出發(fā),通過迭代尋找最優(yōu)解,通過適應度來評價解的品質(zhì),具有較好的健壯性和收斂性[8]。利用粒子群算法對LED陣列優(yōu)化的步驟如下[9]:
b. 檢查確認各操縱舵機是否具備合理安全余量,通常余量不小于10%。
c. 根據(jù)無人直升機姿態(tài)角相關信息判斷無人直升機是否處于穩(wěn)定飛行狀態(tài)。
d. 檢查確認包括無線電高度表在內(nèi)的各環(huán)境感知傳感器是否正常工作,避免出現(xiàn)對著艦環(huán)境的誤判。
e. 檢查確認各波段鏈路工作狀態(tài)正常,信息收發(fā)穩(wěn)定,未出現(xiàn)影響飛行安全的數(shù)據(jù)丟包、信號丟失等情況。
(2)載艦運動狀態(tài)
a. 載艦航向是否穩(wěn)定。
b. 載艦橫搖、縱搖角度是否在安全著艦包線范圍內(nèi)。
c. 載艦橫搖、縱搖角速度。
(3)艦面環(huán)境信息
a. 檢查確認艦面是否存在障礙物或易被吹起的漂浮物。
b. 艦橋合成風速、風向是否在無人直升機艦面起降風限圖范圍內(nèi)。
c. 無人直升機懸停位置與理想著艦點之間的相對位置信息。
當以上條件都得到滿足時,無人直升機可執(zhí)行著艦程序,著艦過程要求“快、準、穩(wěn)”,即要求無人直升機在捕捉到靜息期后,快速啟動著艦程序,同時也要在下降高度過程中持續(xù)調(diào)整控制相對于理想著艦點的位置偏差,雖然要求從艦面懸停到觸艦的過程耗時盡可能短,但由于起落架結(jié)構(gòu)強度的限制,也避免在大速度著艦后發(fā)生劇烈的回彈,通常要求觸艦時的下降率不大于2~3 m/s,實現(xiàn)平穩(wěn)著艦。
3 艦載無人直升機復飛程序設計
復飛是指在無人直升機引導著艦過程中,由于任務變更或不具備著艦條件而中止著艦,并按照預定復飛軌跡飛離載艦,隨后按照預先注入或新增的復飛航線飛行的過程,合理的復飛程序設計是保障艦載機安全起降的有力措施。
對于固定翼無人艦載機,平臺本身狀態(tài)或艦面攔阻裝置等不滿足安全著艦要求時,啟動復飛程序。由于其飛行特性,啟動復飛后也需要在飛行甲板上滑行進行再次起飛,但其復飛等待航線及復飛等待判斷點的設計值得參考借鑒。固定翼無人機在滑出跑道復飛后在抵達復飛等待判斷點前,對無人機狀態(tài)及艦面環(huán)境等是否滿足著艦要求做進一步判斷,若可著艦則下滑飛行準備著艦,若不滿足著艦要求則繼續(xù)復飛等待。
本文提出的無人艦載直升機的復飛程序設計如圖5所示,當無人直升機狀態(tài)或載艦運動狀態(tài)、艦面環(huán)境不滿足著艦要求時,啟動復飛程序。在理想狀態(tài)下,要求無人直升機在觸艦前都能中止著艦轉(zhuǎn)入復飛,無人直升機啟動復飛程序后依照圖示步驟,從低懸停位拉高至高懸停位,減小前飛速度/小速度后飛的同時繼續(xù)提升高度脫離載艦甲板,保持高度進一步后飛脫離飛行甲板,在復飛等待判斷點跟艦飛行,再次檢查判斷無人直升機是否滿足著艦條件,若滿足則進入正常的著艦程序,若不滿足則轉(zhuǎn)入備降航線飛抵備降機場。

圖5 艦載無人直升機復飛示意圖
4 結(jié)論
(1)本文在吸納有人艦載直升機艦面起降成熟經(jīng)驗的同時,針對無人直升機的技術特點,歸納總結(jié)出影響無人直升機艦面起降的主要因素,包括艦面流場特性、載艦幾何特性、載艦動態(tài)運動特性、著艦引導精度、著艦控制策略合理性等。
(2)以艦載無人直升機典型著艦引導飛行剖面為牽引,并結(jié)合前文得出的著艦主要影響因素,提出了包含無人機平臺各系統(tǒng)工作狀態(tài)、載艦運動狀態(tài)、艦面環(huán)境信息3 個方面,每個方面涵蓋若干細則條目的無人直升機著艦時機判定準則,對后續(xù)艦載無人直升機型號進行艦基試飛和作戰(zhàn)應用具有重要指導意義。
(3)基于無人直升機的飛行控制特點,借鑒固定翼艦載無人機的復飛程序設計相關思路,提出了適用于艦載無人直升機包含復飛等待判斷點、復飛軌跡、備降航線幾個要素在內(nèi)的復飛程序。該程序作為著艦程序的子模塊,能有效規(guī)避風險,保障艦面作業(yè)安全開展。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38