爬壁機(jī)器人系統(tǒng)的廣義Lagrange方程
2022-03-24 10:05:20陸曉丹張港
機(jī)械工程師 2022年3期
關(guān)鍵詞:系統(tǒng)
陸曉丹,張港
(1.浙江理工大學(xué)理學(xué)院,杭州 310018;2.浙江同濟(jì)科技職業(yè)學(xué)院,杭州 311231)
0 引言
爬壁機(jī)器人可以協(xié)助人們?cè)趶?fù)雜危險(xiǎn)的環(huán)境中進(jìn)行工作,應(yīng)用領(lǐng)域十分廣泛,因此在材料學(xué)、力學(xué)、物理學(xué)、數(shù)學(xué)、生物學(xué)、現(xiàn)代科學(xué)和工程技術(shù)領(lǐng)域等受到廣泛關(guān)注。研制爬壁機(jī)器人有兩個(gè)最需要考慮的因素:一個(gè)是爬壁機(jī)器人的移動(dòng)方式;另一個(gè)是爬壁機(jī)器人的吸附方式[1]。從爬壁機(jī)器人的吸附方式上來(lái)說(shuō),主要可以分為真空吸附、磁吸附、仿生吸附、背推式吸附[2-5]。本文主要從運(yùn)動(dòng)機(jī)能上研究爬壁機(jī)器人。根據(jù)移動(dòng)方式的不同,爬壁機(jī)器人主要分為輪式、履帶式和足式[6]。各種移動(dòng)方式的對(duì)比如表1所示。

表1 不同移動(dòng)方式對(duì)比
未來(lái)爬壁機(jī)器人的研制將朝著靈活性高、體型小、操作智能化等方向發(fā)展。目前,輪式和履帶式爬壁機(jī)器人已經(jīng)得到廣泛應(yīng)用,而四足式仿壁虎型爬壁機(jī)器人具有得天獨(dú)厚的優(yōu)勢(shì),從而在實(shí)際的應(yīng)用中能得到更為廣闊的發(fā)展[7],因此本文以美國(guó)斯坦福大學(xué)研制的四足式仿壁虎型StickyBot III爬壁機(jī)器人[8](如圖1)為研究對(duì)象。

圖1 StickyBotIII爬壁機(jī)器人
爬壁機(jī)器人系統(tǒng)動(dòng)力學(xué)模型的建立,有助于分析爬壁機(jī)器人的性能,設(shè)計(jì)控制算法及評(píng)估機(jī)器人移動(dòng)位置所需要的關(guān)節(jié)力矩等,可以為未來(lái)爬壁機(jī)器人的動(dòng)態(tài)優(yōu)化、控制算法、智能化和路徑規(guī)劃等提供強(qiáng)有力的理論支撐[9]。建立動(dòng)力學(xué)方程的方法有很多種,許多國(guó)內(nèi)外學(xué)者對(duì)不同類(lèi)型的爬壁機(jī)器人采用多樣的方法進(jìn)行動(dòng)力學(xué)分析并得到相應(yīng)的動(dòng)力學(xué)方程,在此做一些簡(jiǎn)單介紹。Xu等[10]利用牛頓力學(xué)的方法建立了輪式爬壁機(jī)器人系統(tǒng)的動(dòng)力學(xué)方程,分別對(duì)系統(tǒng)處于光滑面和越障兩種不同狀態(tài)進(jìn)行受力分析,建立了越障過(guò)程中系統(tǒng)的車(chē)輪和機(jī)身動(dòng)力學(xué)方程;岳榮剛等[11]以City-Climber履帶式爬壁機(jī)器人為原型,利用牛頓力學(xué)的方法,建立了該機(jī)器人在地面、垂直墻壁和天花板不同環(huán)境下的動(dòng)力學(xué)方程,該方程的建立為City-Climber機(jī)器人的路徑規(guī)劃和避障問(wèn)題提供了良好的解決方案,但上述兩個(gè)建模過(guò)程都較為復(fù)雜。徐亞茹等[12-13]利用U-K方程建立了輪式爬壁機(jī)器人的解析動(dòng)力學(xué)方程。事實(shí)上,利用U-K方程進(jìn)行建模需先利用Lagrange力學(xué)法建立系統(tǒng)在未受約束情況下的動(dòng)力學(xué)方程[14],進(jìn)而利用U-K方程建立該系統(tǒng)的動(dòng)力學(xué)方程;并且徐在建模過(guò)程中并未考慮輪子與壁面之間摩擦力和輪子的轉(zhuǎn)動(dòng)慣量,但在實(shí)際情況中,這兩個(gè)是必須考慮的因素,因此本文將該因素考慮其中,以增強(qiáng)模型的適應(yīng)性。此外還有學(xué)者利用D-H法、牛頓-歐拉法等[15-18]建立了爬壁機(jī)器人系統(tǒng)的動(dòng)力學(xué)方程。
以上幾個(gè)典例是構(gòu)建爬壁機(jī)器人系統(tǒng)動(dòng)力學(xué)方程的幾種常見(jiàn)的方法,但可以看到,其過(guò)程都較為復(fù)雜,且爬壁機(jī)器人系統(tǒng)是一個(gè)復(fù)雜的多體約束力學(xué)系統(tǒng),利用牛頓力學(xué)法對(duì)其受力分析時(shí)也較容易出錯(cuò)。本文利用Lagrange力學(xué)分析法,將爬壁機(jī)器人看作一個(gè)系統(tǒng),選用廣義坐標(biāo),計(jì)算該系統(tǒng)的動(dòng)能和勢(shì)能,定義系統(tǒng)的Lagrange函數(shù),寫(xiě)出系統(tǒng)的非完整約束方程,并計(jì)算系統(tǒng)受到的外力和耗散函數(shù),最后給出爬壁機(jī)器人系統(tǒng)的廣義Lagrange方程。
1 爬壁機(jī)器人的動(dòng)力學(xué)分析
1.1 爬壁機(jī)器人四肢動(dòng)力學(xué)分析
首先計(jì)算爬壁機(jī)器人系統(tǒng)四肢相對(duì)于身體的坐標(biāo)和速度。
根據(jù)爬壁機(jī)器人的肢體形態(tài)特點(diǎn),考慮爬壁機(jī)器人的運(yùn)動(dòng)形態(tài),為簡(jiǎn)化起見(jiàn),將爬壁機(jī)器人系統(tǒng)四肢各關(guān)節(jié)看成是1個(gè)自由度的轉(zhuǎn)動(dòng)關(guān)節(jié),并將爬壁機(jī)器人的單支腿簡(jiǎn)化為如圖2所示,簡(jiǎn)化結(jié)構(gòu)由身體0、股骨1、脛骨2和腳掌3組成。
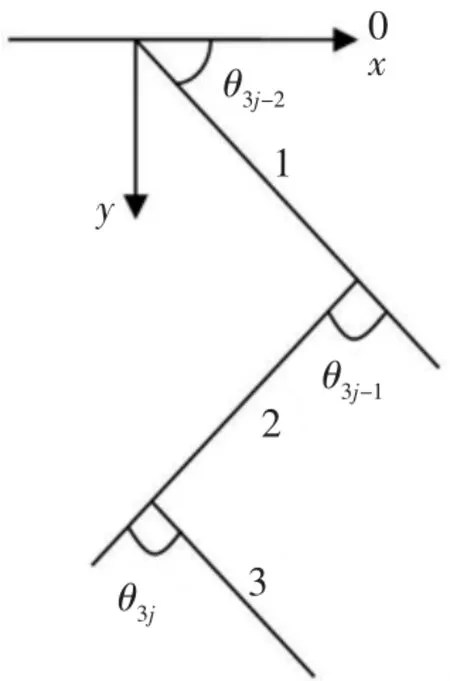
圖2 單肢結(jié)構(gòu)簡(jiǎn)圖
其中構(gòu)件1和構(gòu)件0的連接處為髖關(guān)節(jié),構(gòu)件1和構(gòu)件2的連接處為膝關(guān)節(jié),構(gòu)件2和構(gòu)件3的連接處為踝關(guān)節(jié)。定義θ3j-1、θ3j-2、θ3j等四肢各關(guān)節(jié)的傾斜角度(其中j為爬壁機(jī)器人四肢的數(shù)量)。為方便起見(jiàn),假設(shè)爬壁機(jī)器人系統(tǒng)四肢各關(guān)節(jié)長(zhǎng)度相等為l,質(zhì)量相等為m′,同時(shí)引入qi=θi(i=1,2,…,15)作為廣義坐標(biāo),并用廣義坐標(biāo)表示直角坐標(biāo)。
那么,爬壁機(jī)器人的股骨相對(duì)于身體的質(zhì)心坐標(biāo)可用廣義坐標(biāo)表示為:
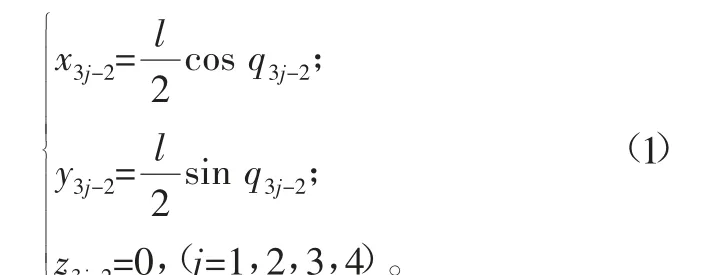
脛骨相對(duì)于身體的質(zhì)心坐標(biāo)可用廣義坐標(biāo)表示為:

1.2 爬壁機(jī)器人機(jī)身動(dòng)力學(xué)分析
接下來(lái)研究運(yùn)動(dòng)過(guò)程中爬壁機(jī)器人機(jī)身中心位置坐標(biāo)及速度變化。
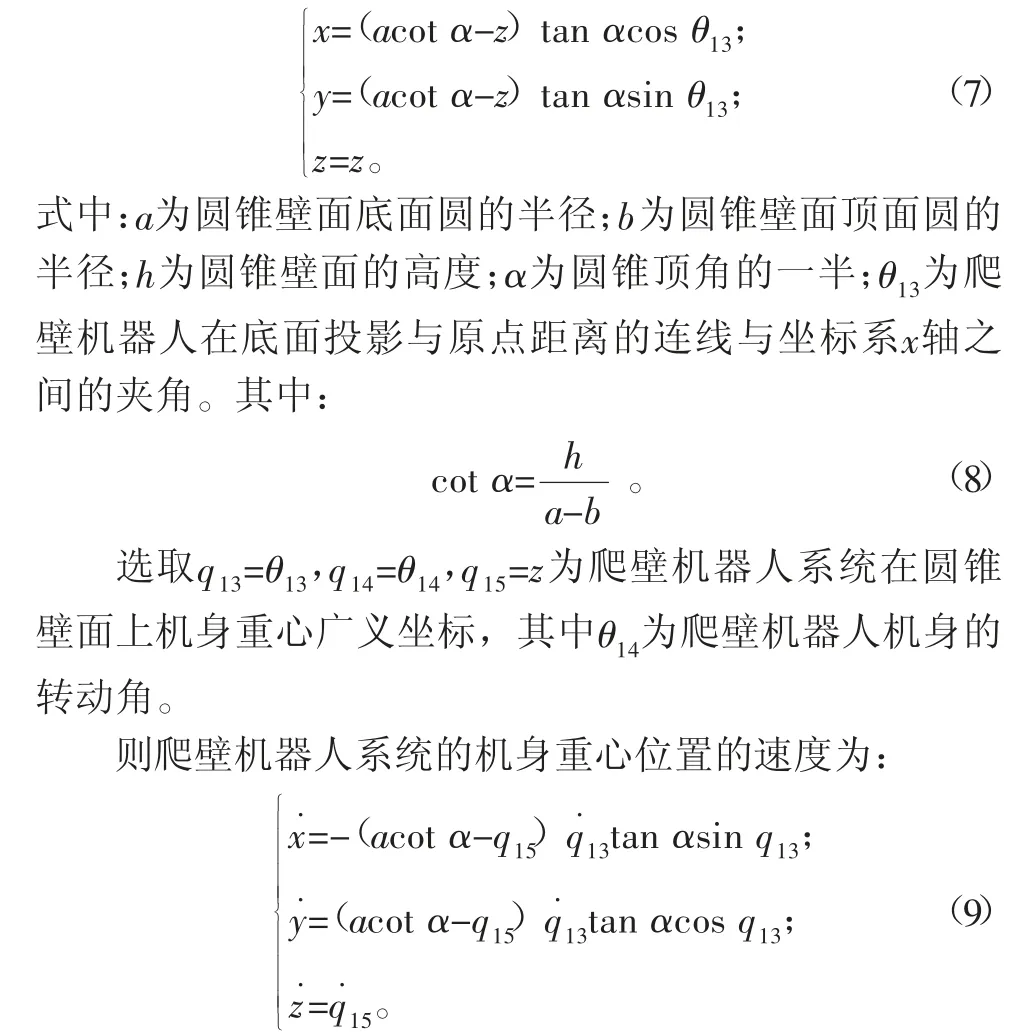
爬壁機(jī)器人的工作環(huán)境一般為豎直的平面、圓柱面和圓錐面等,本文基于圓錐壁面的工作環(huán)境下討論,因?yàn)閳A錐壁面較其他壁面復(fù)雜,所以只要解決了爬壁機(jī)器人在圓錐壁面上的運(yùn)動(dòng)學(xué)原理,那么在其余工作環(huán)境下的運(yùn)動(dòng)學(xué)問(wèn)題也就迎刃而解。現(xiàn)將爬壁機(jī)器人的工作壁面的圖形簡(jiǎn)要畫(huà)出(如圖3)。
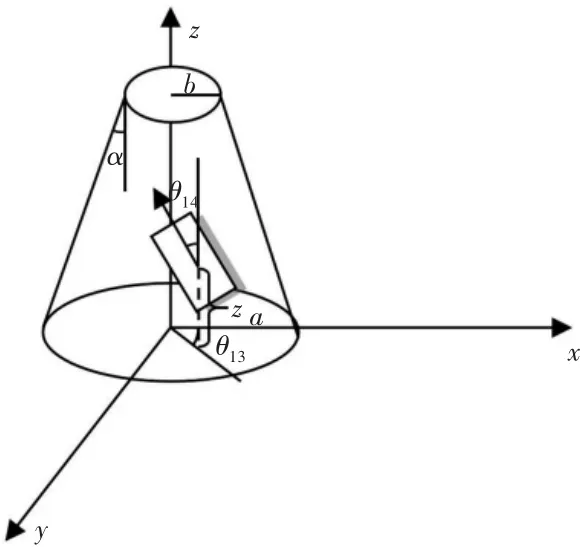
圖3 爬壁機(jī)器人工作壁面簡(jiǎn)圖
在地面中心創(chuàng)建一個(gè)固定的笛卡爾坐標(biāo)系{x,y,z},則在圓錐壁面工作環(huán)境下,爬壁機(jī)器人的質(zhì)心位置根據(jù)幾何學(xué)可用下面的公式表示:
1.3 爬壁機(jī)器人系統(tǒng)動(dòng)力學(xué)分析
設(shè)爬壁機(jī)器人在攀爬過(guò)程中不發(fā)生側(cè)滑,只存在靜摩擦,可以得到非完整約束條件為

2 爬壁機(jī)器人系統(tǒng)的運(yùn)動(dòng)微分方程
2.1 爬壁機(jī)器人系統(tǒng)的Routh方程
采用Lagrange乘子法,得到非完整爬壁機(jī)器人系統(tǒng)的運(yùn)動(dòng)微分方程,即Routh方程為:
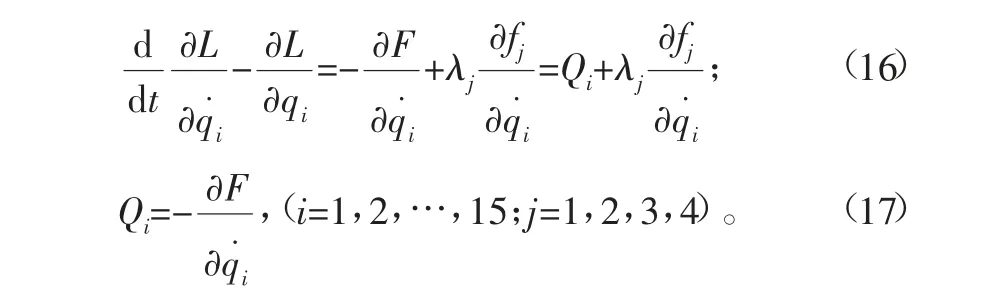
式中:Qi=Qi(t,q,q˙)為非完整爬壁機(jī)器人系統(tǒng)的非勢(shì)廣義力;F為爬壁機(jī)器人4條腿各關(guān)節(jié)之間的摩擦耗散函數(shù),假設(shè)爬壁機(jī)器人系統(tǒng)腳掌與地面之間的平動(dòng)和轉(zhuǎn)動(dòng)的摩擦因數(shù)分別為μ1和μ2,因此爬壁機(jī)器人系統(tǒng)的摩擦耗散函數(shù)為
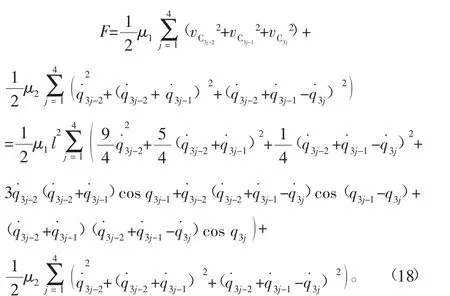
其中,vc3j-2、vc3j-1、vc3j分別為爬壁機(jī)器人系統(tǒng)中四肢各關(guān)節(jié)中心位置的速度。
2.2 爬壁機(jī)器人系統(tǒng)的Lagrange方程
設(shè)系統(tǒng)(16)非奇異,即det(?2L/?q˙s?q˙k)≠0(s,k=1,2,…,15),則由式(10)和式(16)可求出所有λj=λj(t,q,q˙),(j=1,2,3,4),式(16)便可寫(xiě)為

式中:

式中,Λi為廣義約束反力。
式(19)為非完整爬壁機(jī)器人系統(tǒng)方程式(10)和式(16)相應(yīng)的完整系統(tǒng)的運(yùn)動(dòng)微分方程,即Lagrange方程。
3 爬壁機(jī)器人系統(tǒng)的廣義Lagrange算例
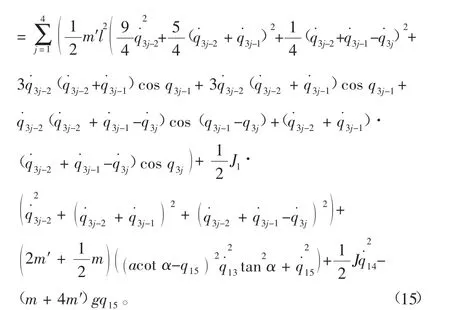
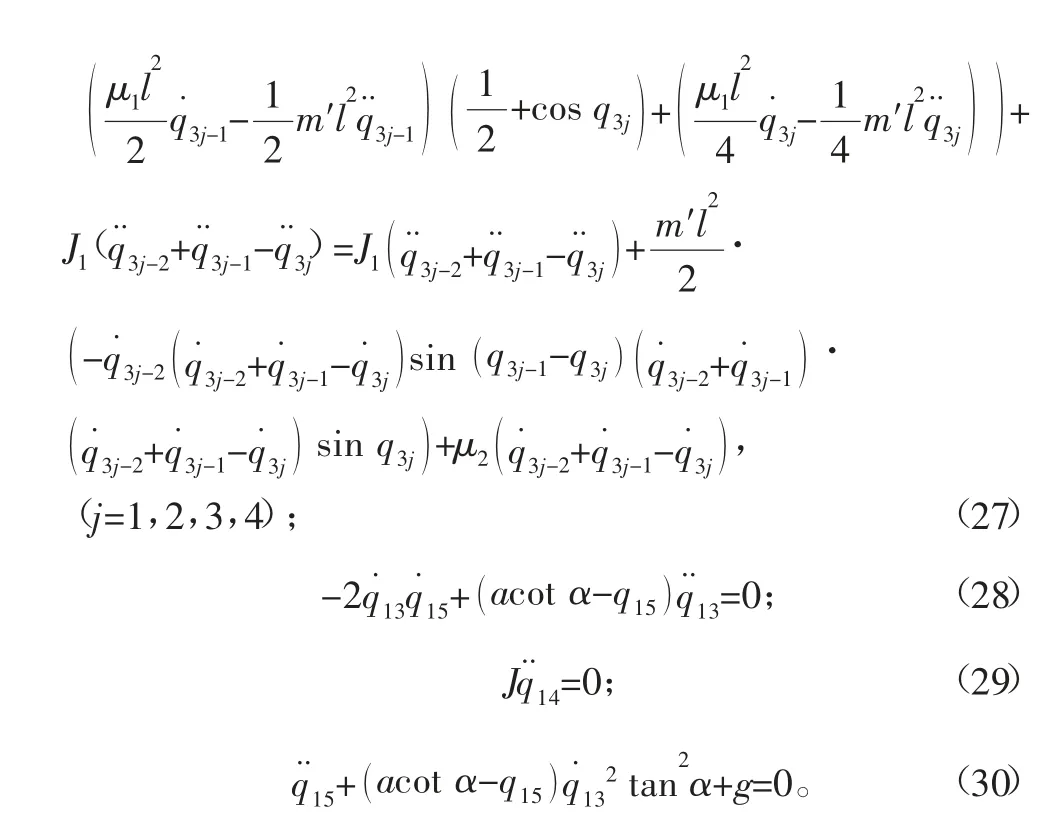
通過(guò)以上討論,已經(jīng)得出非完整爬壁機(jī)器人系統(tǒng)在圓錐壁面上的Lagrange函數(shù)及非完整爬壁機(jī)器人系統(tǒng)Routh方程式(16)和相應(yīng)完整系統(tǒng)的Lagrange方程式(19)。現(xiàn)給出圓錐壁面上具體的廣義Lagrange方程。將式(10)、式(15)、式(18)代入式(16)得:


4 結(jié)論
本文將Lagrange力學(xué)法引入到四足式爬壁機(jī)器人系統(tǒng),根據(jù)爬壁機(jī)器人系統(tǒng)運(yùn)動(dòng)過(guò)程分析了爬壁機(jī)器人系統(tǒng)的動(dòng)能、勢(shì)能及所受的非完整約束,給出爬壁機(jī)器人系統(tǒng)的Lagrange函數(shù)并建立了該系統(tǒng)廣義Lagrange方程。在最后給出爬壁機(jī)器人系統(tǒng)廣義Lagrange算例,求出在圓錐壁面上非完整爬壁機(jī)器人的Lagrange乘子(24),得到非完整爬壁機(jī)器人系統(tǒng)相應(yīng)完整爬壁機(jī)器人系統(tǒng)的運(yùn)動(dòng)微分方程即Lagrange方程。利用Lagrange力學(xué)方法研究四足式爬壁機(jī)器人系統(tǒng)更為簡(jiǎn)便,形式上也具有較高的統(tǒng)一性。
在本文取得成果的基礎(chǔ)上,可以引入Lie群分析法,建立該系統(tǒng)的對(duì)稱(chēng)性理論,得到相應(yīng)守恒量,從而得出爬壁機(jī)器人系統(tǒng)的運(yùn)動(dòng)規(guī)律。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32