天問一號火星探測器EDL過程自主導航技術
2022-03-25 02:49:10李茂登黃翔宇郭敏文胡錦昌劉旺旺王曉磊徐李佳王云鵬
宇航學報 2022年1期
李茂登,黃翔宇,徐 超,郭敏文,胡錦昌,趙 宇,劉旺旺,王曉磊,徐李佳,王云鵬,郝 策
(1.北京控制工程研究所,北京 100094;2.空間智能控制技術重點實驗室,北京 100094)
0 引 言
火星探測是深空探測的熱點之一,研究火星的磁場、大氣、氣候以及地質、地貌等,對于研究火星的形成和演化,探索生命的起源等具有重大的科學意義。中國首顆火星探測器天問一號通過一次發射實現了火星環繞、著陸和巡視的全部目標。火星進入、下降和著陸過程(Entry, descent, and landing, EDL)是火星著陸探測任務最為關鍵的階段,該階段直接影響任務的成敗。火星EDL過程分為氣動減速、傘降減速和動力減速三個階段,其中氣動減速段包括攻角配平段和升力控制段,主要利用火星大氣進行減速并飛向預定開傘點。這一階段從著陸巡視器(后文簡稱為著陸器)進入大氣層(高度約為125 km)開始,到打開降落傘為止。在這期間,著陸器利用氣動外形進行減速控制,期間要經受嚴酷的氣動加熱和過載環境考驗,為了保護著陸器免受惡劣環境的影響,需要將著陸器安裝在防熱罩內。在傘降減速段,著陸器將借助傘的作用力進一步減速,并拋掉防熱大底(簡稱大底)。一旦減速至降落傘的穩降速度,則拋掉降落傘(又稱背罩),轉入動力減速段。在動力減速段,軌控發動機開始工作,進行主動減速控制并規避傘-背罩組合體和地形障礙,最終以預定的速度和姿態軟著陸于火星表面。
著陸器制導、導航與控制(Guidance, navigation, and control, GNC)分系統是負責實施EDL過程任務的主要分系統,通過多種減速機制,控制著陸器以預定的姿態和速度著陸于火星表面。火星EDL過程時間緊(僅7~10 min)、所有動作不可逆、環環相扣,受地-火大通信延時(此時火星距離地球約3×10km,地火雙向通信時延長達36 min)的影響,GNC分系統需要實現完全自主決策和控制。而準確可靠的自主導航估計是實現完全自主決策和控制的基本前提。火星EDL過程為動力飛行過程,因此其自主導航主要依賴于基于慣性測量單元(Inertial measurement unit, IMU)的慣性自主導航。慣性自主導航系統在進入火星大氣前進行位置、速度和姿態初始化,然后利用IMU的三軸陀螺和加速度計分別測量著陸器的慣性角速度和非引力加速度,再結合引力模型,可以對慣性狀態進行解算。受初始條件、IMU測量誤差以及動力學模型的影響,慣性導航的誤差會隨著時間累積而發散。此外,慣性導航也難以獲取相對火星表面的狀態信息。這就需要借助相對導航敏感器對慣性導航誤差進行修正,并提供相對于火星表面的精確狀態。由于大底的遮擋作用,這些相對導航敏感器只有在拋掉大底以后才開始工作。可供選擇的成熟敏感器有測距測速敏感器和成像導航敏感器,其中測距測速敏感器一般僅對高度和速度進行修正,無法提供水平位置的精度估計,成像導航敏感器可以實現三維位置、速度以及姿態的修正。顯然,和成像導航敏感器相比,測距測速敏感器難以滿足定點著陸任務的需求,但是其技術相對成熟,星上計算量相對較小,無需事先存儲高精度的地形地圖,是現有絕大多數深空探測任務著陸階段的主流導航方式。對于月球、火星大天體探測任務而言,除了美國的火星2020任務采用了基于成像導航敏感器的地形匹配導航技術,其余探測任務都無一例外的采取的是IMU配以測距測速的導航方式。天問一號是中國首次實施的火星探測任務,著陸目標是保障安全著陸,而非定點著陸,因此天問一號探測器在充分繼承了中國嫦娥工程的導航方案基礎上,采取的是慣性導航/慣性導航+測距測速修正的導航方案,其中在拋大底以前僅依賴于純慣性導航,拋大底后采取的是慣性導航+測距測速修正。應當指出的是,盡管天問一號探測器沒有采用地形匹配導航,但是它仍然需要借助于成像導航敏感器去選擇安全著陸點,進行自主避障,并實現相對著陸點的相對導航,這和嫦娥系列的月球軟著陸任務也類似。
火星EDL過程的大動態、強不確定性給導航系統的設計帶來了新的挑戰。首先,由于開傘(馬赫數大于1.4)存在喘振現象(降落傘在第一個充氣載荷峰值后,將持續出現一系列載荷峰值,將這個反復出現載荷峰值的動力學過程稱為喘振),誘發著陸器很大的角速度和角加速度,導致慣性導航姿態確定性能下降,甚至可能超過陀螺量程導致導航姿態基準丟失。其中姿態誤差超差可能會帶來著陸時的側翻風險,姿態基準丟失則會帶來事件觸發錯誤任務失敗的嚴重后果。此外,火星EDL過程大動態過程會給測距測速敏感器的性能、波束可用性帶來一定影響;火星環境先驗知識的匱乏性可能會導致測距測速敏感器實際性能與設計性能不一致;大底、背罩等多運動體的不規則特性也會給測距測速敏感器帶來影響。文獻[4,18]研究了基于測距測速修正的月球軟著陸自主導航方法,文獻[19-21]研究了基于圖像匹配的火星軟著陸自主導航。但是上述文獻均未考慮火星EDL過程的大動態、強不確定性帶來的挑戰。針對上述挑戰和需求,天問一號探測器實現了EDL過程的高容錯強自主著陸導航,具備能夠應付大不確定性的魯棒能力,具備對多故障的高容錯能力,具備能夠應付姿態基準丟失的強自主能力,實現了準確可靠的狀態估計。本文則對天問一號探測器火星EDL過程自主導航方案及算法設計進行研究。
1 導航系統方案與組成
1.1 導航坐標系


該坐標系的原點在火心處,指向J2000地球平赤道面法線,軸與地心指向J2000歷元地球平春分點方向的向量平行,與,構成右手直角坐標系。

該坐標系的原點在火心處,指向火星北極軸,指向J2000火星平赤道面與火星本初子午線交點,與,構成右手直角坐標系。

該坐標系的原點為著陸器的質心,指向當地橢球的法線方向,在當地橢球切平面內指東,與,構成右手直角坐標系。

該坐標系的原點為著陸平臺下表面的幾何中心,在著陸器接觸火星表面時垂直于著陸平臺下表面指向上方,位于著陸平臺下表面內,指向火星車駛離方向,與,構成右手直角坐標系。該坐標系用來描述著陸器的姿態和導航敏感器的安裝。
1.2 導航敏感器
火星EDL過程的導航敏感器主要包括:慣性測量單元、測距測速敏感器和避障敏感器。其中避障敏感器由光學導航敏感器和多功能避障敏感器組成,用于安全著陸區和安全著陸點選取,并未參與閉環導航解算,因此這里不做詳細的說明。本節僅對前兩種導航敏感器進行說明。
2)測距測速敏感器:測距測速敏感器在拋大底以后開始工作,用于測量相對火星表面的距離和速度,確保著陸精度和安全。火星著陸器配備了兩套測距測速敏感器:一套微波雷達和一套相控陣雷達。這兩套敏感器可以同時提供距離和速度測量信息,其中微波雷達有4個波束組成,4個波束均工作;相控陣雷達由9個波束組成,在火星EDL過程中只有4個波束工作。星上會根據當前導航周期內的導航狀態,選擇下一個導航周期的工作波束,并發出工作波束指令。
1.3 導航算法結構
天問一號探測器在火星EDL過程采取的是慣性導航/慣性導航+測距測速修正的導航方案,其中在拋大底以前由于測距測速敏感器無法工作,因此這一階段采用的是純慣性導航;拋大底以后測距測速敏感器開始工作,用于對慣性導航狀態提供修正。
由于全狀態的不完全可觀性,傳統的測距測速修正算法僅對慣性導航的高度和速度進行修正,不對慣性姿態進行修正。火星EDL過程制導與控制所關注的導航信息主要為相對火星表面的高度、相對火星表面的垂向速度和水平速度、垂向姿態、水平姿態等。這些導航信息都無一例外的和著陸器的姿態信息有關。相比于月球軟著陸過程,火星EDL過程的傘降段動態大、過載高,嚴重制約了慣性導航的定姿精度,甚至可能帶來陀螺飽和導致導航姿態基準丟失的現象。如果慣性導航姿態誤差較大,則會帶來較大的導航計算誤差,可能帶來著陸時的水平速度超差而誘發側翻事故;如果發生陀螺飽和現象,則會發生姿態基準丟失現象,從而導致慣性導航和敏感器計算出的高度和速度信息均有誤,后果極其嚴重,可能會錯誤進行事件觸發或實施錯誤控制,導致著陸任務失敗。針對上述風險,天問一號著陸器在嫦娥三號著陸器導航框架的基礎上,設計了基于慣性測量單元和測距測速雷達的導航基準重構算法、引力方向修正算法。天問一號探測器EDL過程的導航算法結果如圖1所示,整個算法結構由前臺和后臺兩部分組成,其中前臺為正常的慣性導航和慣性導航+測距測速修正算法,后臺導航利用慣性測量單元和雷達重新確定引力方向。如果多個陀螺出現飽和導致姿態基準丟失,則利用確定的引力方向重新建立導航基準,對慣性導航進行重新初始化,確保導航給出的高度、垂向速度和水平速度大小無誤;如果未出現導航基準丟失的情況,則用后臺確定的引力方向和慣性導航給出的引力方向進行監測和比對,在必要時進行引力方向修正,提高垂向姿態估計精度,進而提高導航其它狀態的估計精度。這種分布式平行式導航結構受啟發于嫦娥四號的導航框架,其優勢在于前、后臺導航計算相互獨立、解耦,互不干擾。應當指出的是嫦娥四號探測器的前后臺導航框架主要用于測距測速故障檢測,提高引入修正數據的可靠性,而天問一號著陸器的前后臺導航框架的主要作用在于對姿態進行修正。

圖1 天問一號探測器EDL自主導航架構
2 慣性導航
在兩器(著陸器和環繞器)分離前的幾分鐘,上注地面測控給出的著陸器位置和速度,著陸器初始姿態由星敏感器確定。自那一刻起,著陸器姿態由陀螺和星敏感器聯合確定,位置和速度由高階軌道動力學外推得到,其中加速度計用于對非引力加速度進行補償。在大氣進入前一分鐘左右,由于火星的遮擋作用導致星敏感器不再可用,這時候開始進行慣性導航外推。
火星EDL過程動態較大,圓錐效應和劃槳效應明顯,為了盡可能的對圓錐效應和劃槳效應進行補償,天問一號探測器采用的是基于四子樣的大動態慣性導航算法。上文說過,天問一號探測器配備了6個陀螺和加6個加速度計,在進行導航外推前先對陀螺和加速度計進行基于平衡方程的故障檢測算法,挑出3個陀螺和3個加速度計用于外推。IMU的故障檢測和選取算法繼承自嫦娥系列著陸器。
3 導航參數解算
從進入到火星大氣到拋大底這段時間,慣性導航主要用于制導與控制以及開傘、拋大底等關鍵事件的觸發。涉及到的參數計算有馬赫數、升阻比和阻力加速度估計。忽略風速的影響,馬赫數的計算公式如下:
(1)
式中:∈為火星的自轉角速度,為常矢量;對于=[,,]∈,()由下式給出:
式中的和分別為慣性導航系統給出的位置和慣性速度;為當地音速,計算公式如下:

(2)
其中,為火星大氣絕熱指數,為通用氣體常數,為火星大氣絕對溫度,具體數值根據表格插值得到,為火星大氣平均分子摩爾質量。
升阻比和阻力加速度估計用于氣動減速過程的制導,阻力加速度大小的計算公式如下:
(3)


(4)
從而可以由式(3)和式(4)計算得到升阻比。
4 測距測速修正
在傘降段拋掉大底以后,測距測速敏感器開始工作,可以提供相對火星表面的波束方向視向距離和速度測量。其中速度測量可以對慣性導航的三維速度進行修正,距離測量對橫向位置不敏感,因此僅進行高度方向的修正。
4.1 測距修正
測距修正的動力學方程由下式給出:
(5)

測距敏感器有多個波束,第個波束的觀測模型可以寫作

(6)


(7)


(8)


(9)
對于式(5)和(9)組成的動力系統,其測量更新方程可以由下式給出
(10)
其中,()和()ver分別為第個測距波束對應的高度和垂向速度修正量,為修正前導航計算的高度,()∈為濾波增益矩陣。由式(5)和(9)組成的系統為定常系統,()采用的是穩態卡爾曼濾波的增益矩陣,并根據高度、測量噪聲以及地形起伏擬合得到。
考慮到測距敏感器能夠提供多個波束的測距信息,因此修正時需要進行融合修正。如果兩個或兩個以上的測距波束有效且滿足引入修正條件,則采用融合加權修正的方法。融合后的高度修正公式如下:

(11)

給定,慣性位置的更新方程如下:

(12)
其中,上標-、+分別表示修正前和修正后的慣性位置,為了書寫方便,上式中忽略了上標。
4.2 測速修正


(13)


(14)
將式(14)代入到式(13)中可以得到


(15)


(16)
而測速敏感器第個波束的觀測方程為

(17)

由式(16)和式(17)可以得到第個波束的速度修正公式如下

(18)

式(18)給出了單個波束的速度修正公式,在實際飛行的時候有多個波束可用,因此需要對多個波束的修正進行融合實現導航速度的三維修正。對于多個波束可用的情形,如果可用波束均共線,則只能沿著這些波束的共線方向修正,如果所有可用波束均共面,則只能在共面內進行修正,否則可能會帶來濾波發散問題。對于火星著陸器,由波束的安裝可知不存在波束共線的情形。但是由于相控陣敏感器的工作波束不固定性,可能存在波束共面的情形。針對這一情形,建立等效波束的概念。不管可用的實際波束是幾個,如果有3個不共面的有效波束,則其等效波束(記為)個數為3;如果所有有效波束均共面,則等效波束個數為2;如果只有1個有效波束可用,則其等效波束個數為1;否則,等效波束為0。具體的判據如下:當可用的有效波束個數≥3的時候,記這些波束指向組成的矩陣為

(19)

具體的修正策略如下:如果=0,則不進行修正;如果=1,則只沿著有效波束方向進行修正;如果=2,則只在波束構成的平面進行修正;如果=3,則進行三維速度的修正。
4.3 測距測速引入修正判斷
在上述兩節中提及到(),()用于表征是否引入修正的標識符。天問一號探測器采取了多種邏輯對引入修正進行了判斷,其中:第一道邏輯是測距測速敏感器給出的標識符為有效;第二道邏輯是利用故障檢測算法對測距觀測量、測速觀測量進行故障檢測和選取,其中天問一號探測器提出了基于中位數的測距多波束故障檢測與選取、基于決策推理和平衡方程的自適應構型多波束測速故障檢測與選取算法(限于篇幅限制,將在另外的文章中給出詳細算法),可以實現多個波束的故障檢測、隔離和剔除;第三道邏輯是將測距、測速觀測量與導航值進行對比,只有在兩者的誤差量小于一定閾值的時候才引入修正,這樣可以實現對測距、測速野值的有效剔除。嫦娥三號著陸器采取的是固定系數的修正判斷,火星EDL過程中,飛行過程動態大,一方面可能會導致修正前的慣性導航誤差較大,另外一方面可能會導致修正前期可用波束少的情況。為了盡可能的進行修正,引入修正判斷閾值不易過小。但是過大又可能會導致修正判斷條件不起作用,有引入野值波束的風險,從而帶來慣性導航拉偏的情況。一旦慣性導航被野值拉偏,則后續正常波束可能難以被引入,風險極大。針對這一風險,天問一號探測器提出了基于波束修正個數監測的自適應比對閾值方法,提高了系統魯棒性。對于測距敏感器而言,在以下條件滿足的時候()=1:
|Δ-Δ|≤Δ+||
(20)
式中:Δ,Δ分別表示測距敏感器和系統導航值在同一時間區間內的高度差,Δ和均為常數,為測距比對自適應放大系數,默認值為1.0。如果連續若干個周期引入測距修正的波束過少,則放大至2倍,直至引入測距修正的波束個數恢復正常時才將置為默認值。如果式(20)不滿足,則()=0。
對于測速敏感器而言,如果

(21)
則()=1,否則()=0。式(21)中為設置的門限,為測速自適應放大系數,默認值為1.0,如果連續若干個周期引入測速修正的波束過少,則放大至2倍,直至引入測速修正的波束個數恢復正常時才將置為默認值。
5 基于IMU和測距測速敏感器的導航基準重構或引力方向修正

(22)
將第個測速波束的觀測方程(17)重寫作

(23)



(24)


(25)


(26)

(27)
因此可以構造四元數Δ,如下

(28)
則姿態修正方程如下

(29)

6 飛行結果
天問一號探測器于2021年5月15日4時18分進行兩器分離,歷經約3小時飛行后,到達火星EDL過程的大氣進入點,經過約9分鐘的氣動減速、傘降減速、動力減速和著陸緩沖,于7時18分成功軟著陸于火星烏托邦平原南部的目標著陸區。其中星上導航的起始時刻為降軌前11分鐘,其位置和速度由地面注入,姿態由星敏確定得到。自此至大氣進入前的著陸器的姿態由陀螺和星敏聯合確定得到,位置和速度由高階軌道動力學外推得到。在大氣進入點的導航位置和速度見表1。

表1 火心J2000坐標系下的大氣進入點軌道參數
圖2和圖3給出了火星EDL過程的狀態曲線,其中0時刻表示大氣進入時刻,氣動減速段、傘降減速段和動力減速段用+號隔開,分別歷時281.335 s,169.472 s和89.60 s。在自大氣進入到拋大底13 s后引入測距測速修正,在導航高度為10 m的時候停止測距測速修正。在停止修正的時刻,導航與測距之間的對比誤差優于0.07 m,與測速之間的對比誤差優于0.084 m/s,最終的著陸狀態為水平速度小于0.16 m/s,垂向速度大小為1.68 m/s,垂向姿態誤差小于0.1°。

圖2 高度曲線
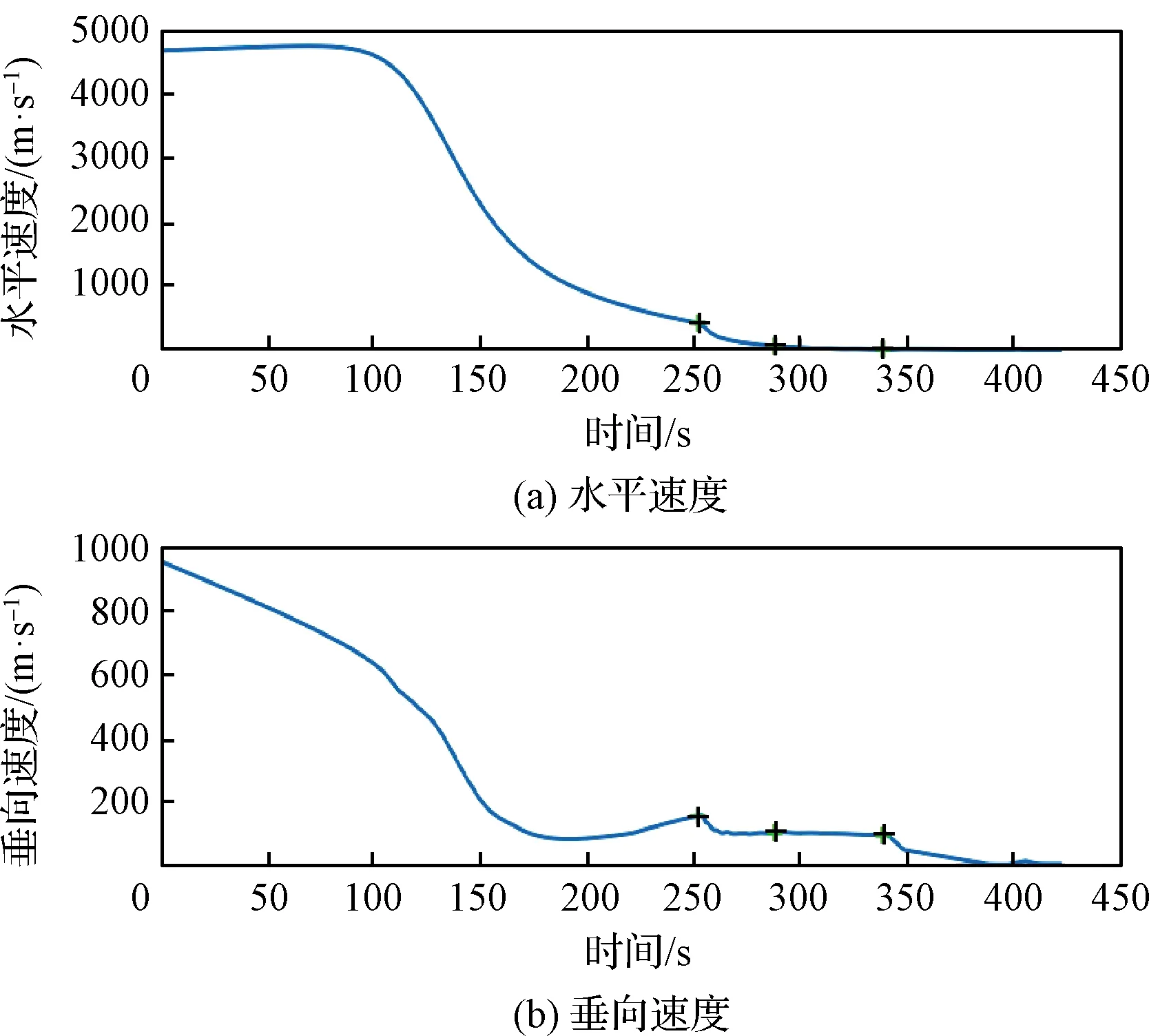
圖3 水平速度和垂向速度
從飛行結果看,天問一號自主導航系統圓滿完成了預定任務。在著陸時刻,導航相對于測定軌數據之間的絕對位置為1.4055 km。
7 結 論
本文研究了中國首顆火星探測器天問一號的火星進入、下降和著陸(EDL)過程的自主導航技術。天問一號的EDL過程自主導航充分繼承了中國嫦娥三號著陸器基于慣性測量單元的測距測速修正導航方案和中國嫦娥五號返回器的純慣性導航,其中基本導航框架繼承自嫦娥三號著陸器。在EDL前期,由于大底的遮擋作用,僅采用慣性測量單元進行慣性導航,在后期采用慣性測量單元+測距測速修正。和地球返回過程相比,火星EDL過程需要在開傘以后仍然實施主動控制,保障著陸狀態;而火星大動態及不確知性強的氣動減速和傘降過程是月球軟著陸所沒有的。為了應付火星復雜EDL過程,天問一號探測器配備了高度冗余的測距測速敏感器。為了提高導航系統的可靠性,天問一號探測器設計了適應星上計算能力的多波束測距測速故障檢測、隔離與選取算法、基于波束修正個數監測的比對閾值自適應算法;為了提高導航系統對大動態的適應能力,天問一號探測器設計基于慣性測量單元和測距測速敏感器的導航基準重構算法、引力方向修正算法。這些算法與方案保障了天問一號探測任務的著陸圓滿成功。
