減載運(yùn)行雙饋風(fēng)力發(fā)電機(jī)參與系統(tǒng)調(diào)頻的多風(fēng)速段變系數(shù)控制策略
2022-03-28 08:30:38周仙豐王娟娟
自動(dòng)化與儀表 2022年3期
周仙豐,王娟娟
(大連交通大學(xué) 自動(dòng)化與電氣工程學(xué)院,大連116028)
雙饋風(fēng)力發(fā)電機(jī)(doubly-fed induction generator,DFIG)的轉(zhuǎn)子與電網(wǎng)通過功率變換器相連,轉(zhuǎn)子轉(zhuǎn)速與系統(tǒng)頻率完全解耦,無法響應(yīng)系統(tǒng)頻率變化,不利于系統(tǒng)頻率的穩(wěn)定。因此,風(fēng)電機(jī)需要具備類似同步發(fā)電機(jī)一樣的調(diào)頻能力[1]。目前風(fēng)電機(jī)參與系統(tǒng)調(diào)頻的主要控制方式分為轉(zhuǎn)子動(dòng)能控制和減載控制,其中轉(zhuǎn)子動(dòng)能控制包括下垂控制和虛擬慣性控制,減載控制包括轉(zhuǎn)子超速控制和變槳距角控制[2]。對(duì)于最大功率運(yùn)行狀態(tài)的風(fēng)機(jī),轉(zhuǎn)子轉(zhuǎn)速的增大或減小都能降低風(fēng)機(jī)出力,但減速運(yùn)行的風(fēng)機(jī)不利于系統(tǒng)穩(wěn)定,所以一般采用轉(zhuǎn)子超速控制實(shí)現(xiàn)減載[3]。文獻(xiàn)[4]分析了轉(zhuǎn)子超速控制的減載能力,指出其適用范圍受風(fēng)機(jī)最大轉(zhuǎn)速限制;文獻(xiàn)[5]采用變槳距角控制,通過增大槳距角實(shí)現(xiàn)風(fēng)機(jī)的減載運(yùn)行;文獻(xiàn)[6]將轉(zhuǎn)子超速控制和變槳距角控制結(jié)合使用,對(duì)于不同的風(fēng)速采用不同的控制方法,充分利用轉(zhuǎn)子超速和變槳距角控制的優(yōu)勢(shì)。
針對(duì)DFIG 減小系統(tǒng)慣量的問題,文獻(xiàn)[7]提出虛擬慣性的概念,通過在DFIG 功率控制回路中附加虛擬慣性控制環(huán)節(jié)響應(yīng)系統(tǒng)頻率變化,使風(fēng)機(jī)釋放或吸收轉(zhuǎn)子動(dòng)能參與系統(tǒng)調(diào)頻;文獻(xiàn)[8]將下垂控制和虛擬慣性控制結(jié)合進(jìn)行調(diào)頻,但調(diào)頻結(jié)束后轉(zhuǎn)子恢復(fù)原轉(zhuǎn)速吸收有功,易造成頻率二次跌落;文獻(xiàn)[9]采用固定的下垂系數(shù)進(jìn)行頻率調(diào)節(jié),但由于風(fēng)機(jī)的出力和風(fēng)速有關(guān),固定參數(shù)的下垂控制不能充分利用風(fēng)機(jī)的備用容量參與系統(tǒng)調(diào)頻;文獻(xiàn)[10]提出變下垂控制策略,利用優(yōu)化后的下垂系數(shù)對(duì)風(fēng)電機(jī)組進(jìn)行設(shè)定,以此改善其調(diào)頻效果,但并未給出槳距角的計(jì)算方法。
本文將轉(zhuǎn)子超速控制和變槳距角控制相結(jié)合,考慮到風(fēng)能利用系數(shù)和葉尖速比與槳距角間復(fù)雜的非線性關(guān)系,定義減載程度,通過數(shù)值計(jì)算的方法將轉(zhuǎn)速、槳距角、機(jī)械功率和減載程度間的對(duì)應(yīng)數(shù)值求解出來。然后考慮不同風(fēng)速下雙饋風(fēng)機(jī)能達(dá)到固定減載程度所采用的控制方式對(duì)風(fēng)速進(jìn)行分段,并對(duì)下垂系數(shù)和慣性系數(shù)進(jìn)行整定,提出雙饋風(fēng)機(jī)參與系統(tǒng)頻率調(diào)節(jié)的控制策略,并通過仿真驗(yàn)證了控制策略的有效性。
1 DFIG 減載運(yùn)行控制策略
1.1 轉(zhuǎn)子超速和變槳距角控制原理
雙饋風(fēng)機(jī)的風(fēng)輪輸出機(jī)械功率表達(dá)式為
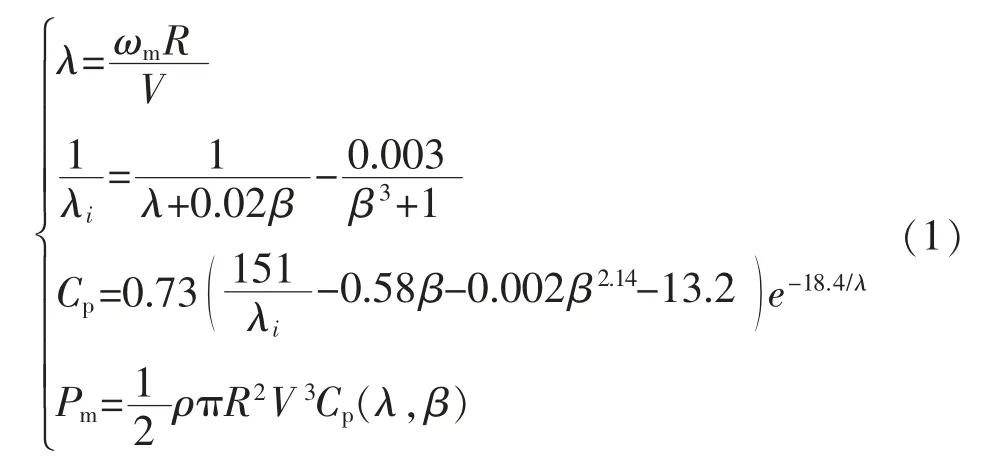
式中:ωm為風(fēng)輪機(jī)械角速度;R為風(fēng)輪半徑;V為風(fēng)速;λ 為葉尖速比;β 為槳距角;Cp為風(fēng)能利用系數(shù);ρ 為空氣密度;Pm為風(fēng)輪機(jī)械功率。
根據(jù)式(1)可知風(fēng)機(jī)的輸出功率主要與風(fēng)速、風(fēng)輪轉(zhuǎn)速和槳距角有關(guān),在某一風(fēng)速Vw0下風(fēng)輪輸出的機(jī)械功率與轉(zhuǎn)速及槳距角的關(guān)系曲線如圖1所示。
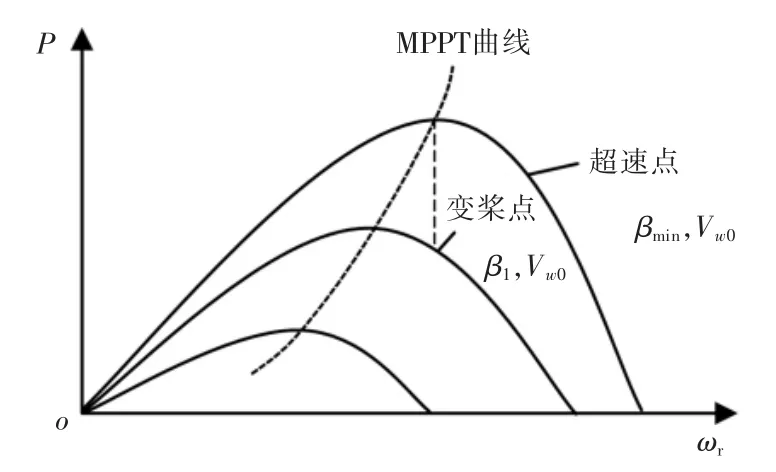
圖1 風(fēng)輪輸出機(jī)械功率與轉(zhuǎn)速和槳距角的關(guān)系曲線Fig.1 Relationship curve between wind turbine output mechanical power and speed and pitch angle
由圖1 可知,當(dāng)雙饋風(fēng)機(jī)運(yùn)行于最大功率輸出模式,即圖中MPPT 曲線時(shí),增大轉(zhuǎn)子轉(zhuǎn)速或槳距角都會(huì)使風(fēng)機(jī)輸出功率下降,從而實(shí)現(xiàn)減載運(yùn)行。
1.2 轉(zhuǎn)子超速和變槳距角控制策略
定義減載程度d%,其表示在任意風(fēng)速條件下,通過轉(zhuǎn)子超速和變槳距角控制使風(fēng)機(jī)發(fā)出當(dāng)前風(fēng)速下(1-d%)的最大輸出功率。風(fēng)輪輸出機(jī)械功率與轉(zhuǎn)速和風(fēng)速的關(guān)系曲線如圖2所示,其中ωmax為風(fēng)機(jī)最大轉(zhuǎn)速;Pmax為風(fēng)機(jī)最大功率;Vw,cut-in為風(fēng)機(jī)最小切入風(fēng)速,Vω2>Vω1>Vω,cut-in;βmin為最小槳距角;ABCD為風(fēng)機(jī)以最大功率跟蹤方式運(yùn)行的功率曲線;A′B′C′D′為風(fēng)機(jī)按d%減載運(yùn)行的功率曲線。
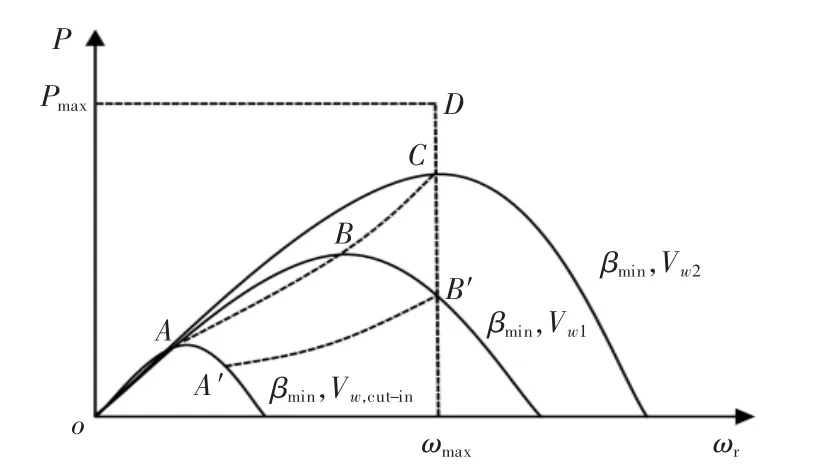
圖2 風(fēng)輪輸出機(jī)械功率與轉(zhuǎn)速和風(fēng)速的關(guān)系曲線Fig.2 Relationship curve between mechanical power output of wind turbine and speed and wind speed
由圖2 可知,風(fēng)速Vw1為風(fēng)機(jī)僅通過轉(zhuǎn)子超速控制實(shí)現(xiàn)d%減載的風(fēng)速上限,其控制區(qū)域?yàn)锳′B′BA。風(fēng)速Vω2為使用轉(zhuǎn)子超速控制方式的最大風(fēng)速,此時(shí)需要結(jié)合轉(zhuǎn)子超速控制和槳距角控制才能實(shí)現(xiàn)d%減載,該模式的控制可行區(qū)域是BB′C。風(fēng)速大于Vω2時(shí),如圖2 中CD區(qū)域所示,此時(shí)受到風(fēng)機(jī)轉(zhuǎn)子最大轉(zhuǎn)速的限制,只能采用變槳距角控制。
本文以2.4 MW 雙饋風(fēng)力發(fā)電機(jī)為例,風(fēng)機(jī)的基本參數(shù)見表2~表5,結(jié)合式(1)便可得到該風(fēng)機(jī)按最大功率模式運(yùn)行下的風(fēng)速—轉(zhuǎn)速和風(fēng)速—功率特性曲線,如圖3所示。
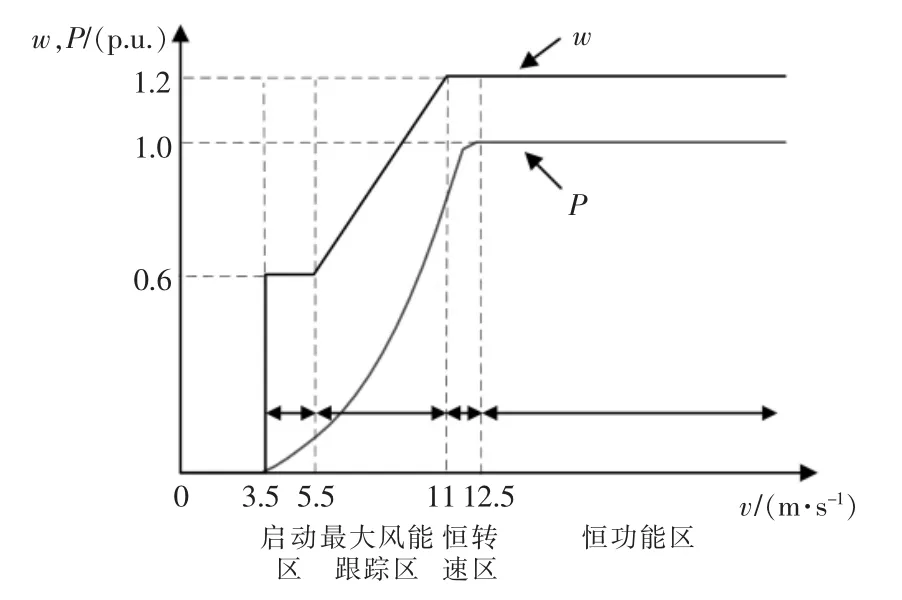
圖3 2.4 MW 雙饋風(fēng)機(jī)轉(zhuǎn)子轉(zhuǎn)速和輸出功率特性曲線Fig.3 Rotor speed and output power characteristic curve of 2.4 MW doubly fed fan
由式(1)可知當(dāng)風(fēng)速一定時(shí),輸出功率Pm主要與風(fēng)機(jī)轉(zhuǎn)速ω 和槳距角β 有關(guān),但Pm,ω 和β 間具有嚴(yán)重的非線性關(guān)系,因此本文采用數(shù)值計(jì)算的方法對(duì)其求解,計(jì)算流程如圖4所示。
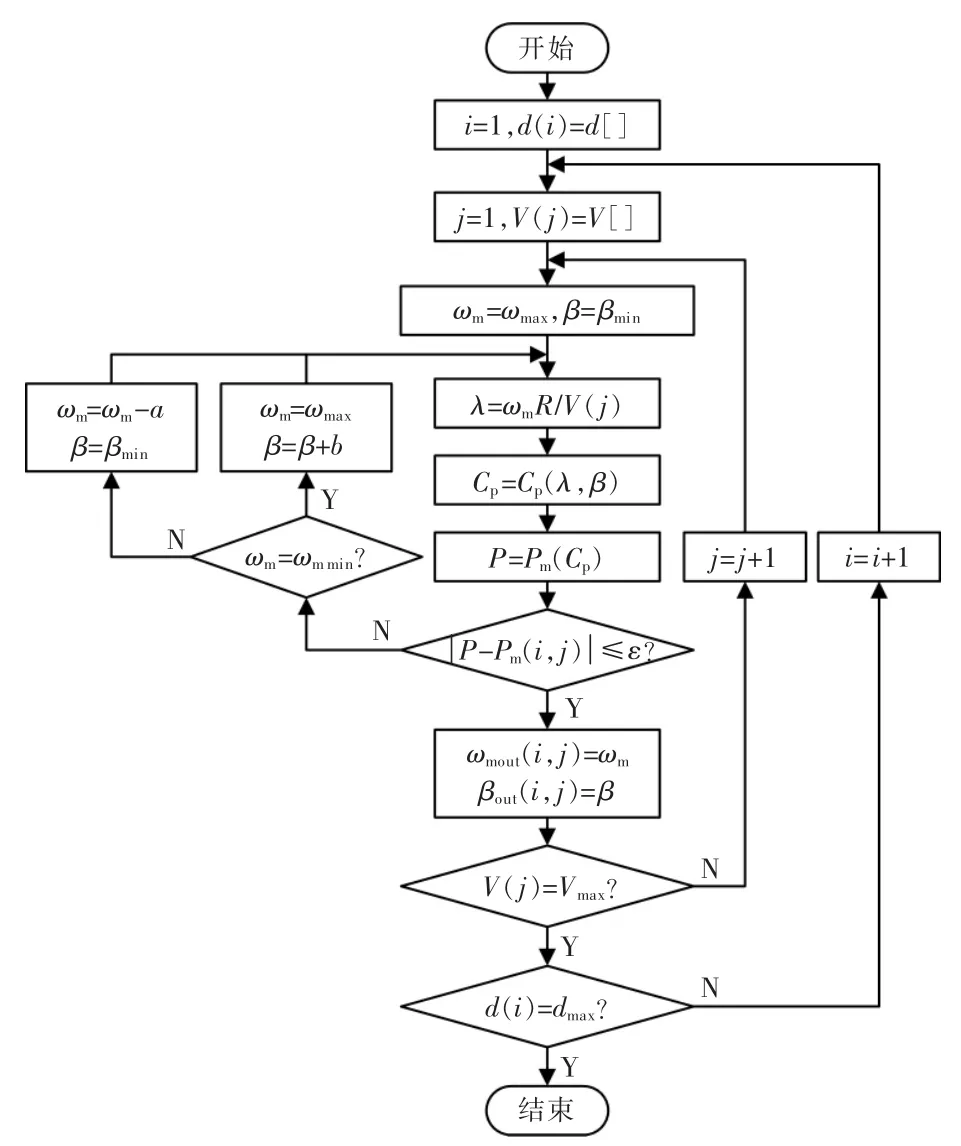
圖4 轉(zhuǎn)速、槳距角數(shù)值計(jì)算流程Fig.4 Numerical calculation flow chart of speed and pitch angle
機(jī)械功率誤差ε 與轉(zhuǎn)速間隔a及槳距角間隔b的取值有關(guān),a和b越小,功率誤差ε 取值越小,計(jì)算結(jié)果越精確。
2 減載風(fēng)電機(jī)組一次調(diào)頻策略
2.1 下垂控制和慣性控制原理
DFIG 的轉(zhuǎn)子通過功率變換器接入電網(wǎng),轉(zhuǎn)子轉(zhuǎn)速和系統(tǒng)頻率解耦,使其不具有調(diào)頻能力,為了使DFIG 能夠響應(yīng)系統(tǒng)頻率的變化,在DFIG 的有功控制環(huán)節(jié)加入下垂控制和虛擬慣性控制來響應(yīng)系統(tǒng)頻率的變化,其基本原理如圖5所示。
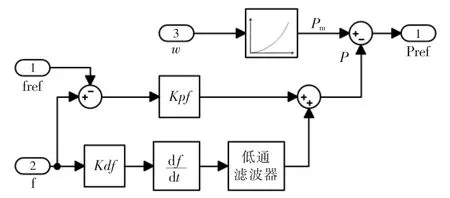
圖5 下垂控制和虛擬慣性控制原理圖Fig.5 Schematic diagram of droop control and virtual inertial control
2.2 下垂控制系數(shù)整定
對(duì)于同步發(fā)電機(jī),其下垂特性為

式中:KG為同步發(fā)電機(jī)的單位調(diào)節(jié)功率;為單位調(diào)節(jié)功率的標(biāo)幺值;PGN為同步發(fā)電機(jī)額定功率;fN為系統(tǒng)額定頻率50 Hz;δG為調(diào)差系數(shù)。
模擬同步發(fā)電機(jī)的雙饋風(fēng)機(jī)下垂特性為

式中:Kpf為DFIG 的單位調(diào)節(jié)功率;為單位調(diào)機(jī)功率的標(biāo)幺值;PWN為DFIG 的額定功率;δw為DFIG調(diào)差系數(shù)。
根據(jù)同步發(fā)電機(jī)的調(diào)差系數(shù)來定義DFIG 的調(diào)差系數(shù)δw為

式中:Pmppt為當(dāng)前風(fēng)速下DFIG 所能發(fā)出的最大功率,Δfw為系統(tǒng)頻率偏差。
綜上可得DFIG 的下垂控制系數(shù)的計(jì)算公式為

2.3 慣性控制系數(shù)整定
同步發(fā)電機(jī)轉(zhuǎn)子機(jī)械角速度為

DFIG 額定運(yùn)行狀態(tài)下轉(zhuǎn)子所儲(chǔ)存的動(dòng)能為
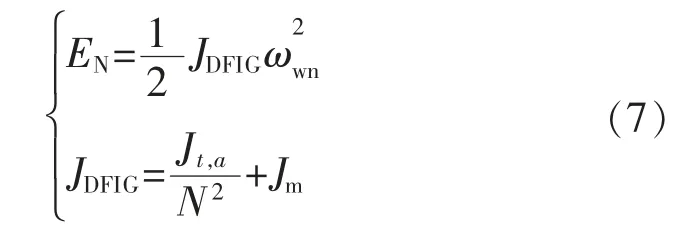
由于DFIG 額定運(yùn)行狀態(tài)下轉(zhuǎn)子的電角速度和同步發(fā)電機(jī)的電角速度不相等,因此需要將DFIG轉(zhuǎn)子儲(chǔ)存的動(dòng)能等值到同步電角速度下,同步電角速度下DFIG 轉(zhuǎn)子儲(chǔ)存動(dòng)能為

聯(lián)立式(7)和式(8)可得DFIG 等效到同步轉(zhuǎn)速下的轉(zhuǎn)動(dòng)慣量為
式中:f為系統(tǒng)頻率;p為極對(duì)數(shù);JDFIG為折算到DFIG 高速軸的等效轉(zhuǎn)動(dòng)慣量;Jt,a為低速軸轉(zhuǎn)動(dòng)慣量;Jm為高速軸轉(zhuǎn)動(dòng)慣量;JN為等值到同步角速度的等效轉(zhuǎn)動(dòng)慣量;N為齒輪箱變速比;ωwn為DFIG 轉(zhuǎn)子額定機(jī)械角速度;ωn為同步角速度。
當(dāng)DFIG 轉(zhuǎn)速變化時(shí),其轉(zhuǎn)子釋放的動(dòng)能為

等值發(fā)電機(jī)組慣性時(shí)間常數(shù)為

聯(lián)立式(10)和式(11)可得
用標(biāo)幺值表示為

由于當(dāng)ω,f取標(biāo)幺值時(shí),其值相等,因此式(13)可變?yōu)?/p>

換算為有名值為

綜上慣性控制系數(shù)的計(jì)算公式為

式中:H為等值發(fā)電機(jī)的慣性時(shí)間常數(shù);SN為DFIG額定容量;PDN為DFIG 額定有功功率;Pdf為慣性控制增發(fā)功率;Kdf為慣性控制系數(shù)。
2.4 DFIG 調(diào)頻控制策略
結(jié)合上文分析,本文將DFIG 參與系統(tǒng)調(diào)頻的控制區(qū)間按風(fēng)速區(qū)段劃分為3 個(gè)區(qū)域,控制方式如表1所示。
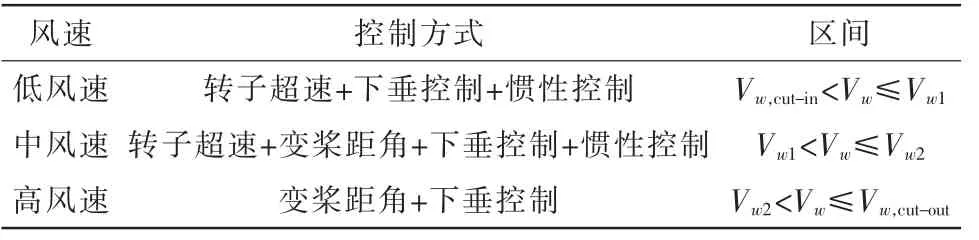
表1 DFIG 調(diào)頻控制方式Tab.1 DFIG frequency modulation control mode
表1 中Vw,cut-in和Vw,cut-out分別為風(fēng)機(jī)運(yùn)行的切入風(fēng)速和切出風(fēng)速;Vw1為低、中風(fēng)速的分界,其值為

Vw2為中、高風(fēng)速的分界,其值由下式計(jì)算

式中:ωmax為DFIG 最大轉(zhuǎn)速;Cpmax為最大風(fēng)能利用系數(shù);λmppt為最優(yōu)葉尖速比。
對(duì)于中風(fēng)速區(qū)DFIG 參與系統(tǒng)調(diào)頻時(shí),優(yōu)先采用轉(zhuǎn)子超速控制,當(dāng)轉(zhuǎn)子超速控制不能滿足調(diào)頻需求時(shí),再采用槳距角控制。
為了便于仿真,本文對(duì)下垂系數(shù)Kpf和慣性系數(shù)Kdf均采用離線方式進(jìn)行求取。對(duì)于下垂系數(shù)Kpf,減載率d%取為10%,頻率偏差Δfw取0.2 Hz,Pmppt可通過最大功率跟蹤模式下的V-Pmppt曲線求得,代入式(1)便可得到V-Kpf特性曲線。對(duì)于慣性系數(shù)可通過同樣的方式求解,由于系統(tǒng)頻率偏差通常不會(huì)超過0.5 Hz,因此f取值范圍為50±0.5 Hz,其它參數(shù)見表2~表5所示,計(jì)算可得f-Kdf特性曲線。
結(jié)合上文分析,DFIG 參與系統(tǒng)頻率調(diào)節(jié)控制策略如圖6所示。其中下垂系數(shù)Kpf和慣性系數(shù)Kdf均由查表所得,最大轉(zhuǎn)速變化率、最大功率調(diào)節(jié)速率和最大槳距角變化率的取值分別為0.5p.u./s,0.3p.u./s 和10°/s,調(diào)頻死區(qū)為50±0.2 Hz,減載率d%為
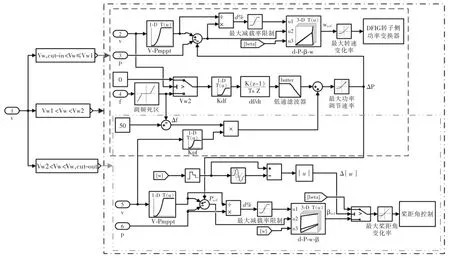
圖6 DFIG 調(diào)頻控制框圖Fig.6 DFIG FM control block diagram

式中:Pmppt為當(dāng)前風(fēng)速下DFIG 能發(fā)出的最大功率;P為DFIG 實(shí)際輸出功率;ΔP為需求的調(diào)頻功率;Pref為DFIG 應(yīng)發(fā)功率。通過查表可得轉(zhuǎn)子轉(zhuǎn)速的理論值,槳距角理論值同理。Vw2為慣性控制選擇模塊,當(dāng)風(fēng)速大于Vw2時(shí),轉(zhuǎn)子轉(zhuǎn)速固定為最優(yōu)轉(zhuǎn)速,慣性控制輸出功率為0。為當(dāng)前轉(zhuǎn)速和滯后轉(zhuǎn)速間的差值,用于判斷中風(fēng)速區(qū)是否啟動(dòng)槳距角控制,當(dāng)大于設(shè)定值時(shí),轉(zhuǎn)子轉(zhuǎn)速變化響應(yīng)系統(tǒng)調(diào)頻;當(dāng)小于設(shè)定值時(shí),轉(zhuǎn)子轉(zhuǎn)速不變,若此時(shí)頻率仍超出調(diào)頻死區(qū)便啟動(dòng)槳距角控制進(jìn)行調(diào)頻。
3 仿真結(jié)果分析
本文利用Matlab/Simulink 搭建了一個(gè)由4 臺(tái)同步發(fā)電機(jī)、1 臺(tái)DFIG 和負(fù)荷組成的仿真系統(tǒng)。其中同步發(fā)電機(jī)的額定功率為2 MW 并帶有調(diào)速器和調(diào)頻器,不設(shè)調(diào)頻死區(qū)。DFIG 的額定容量為2.4 MW,其詳細(xì)參數(shù)如表2~表5所示。
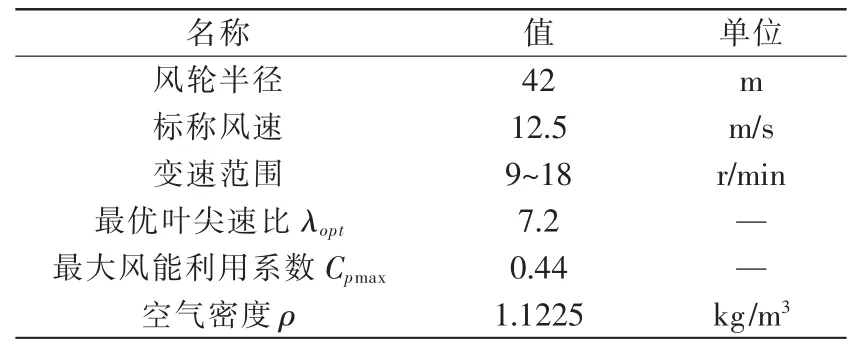
表2 風(fēng)力機(jī)參數(shù)Tab.2 Wind turbine parameters
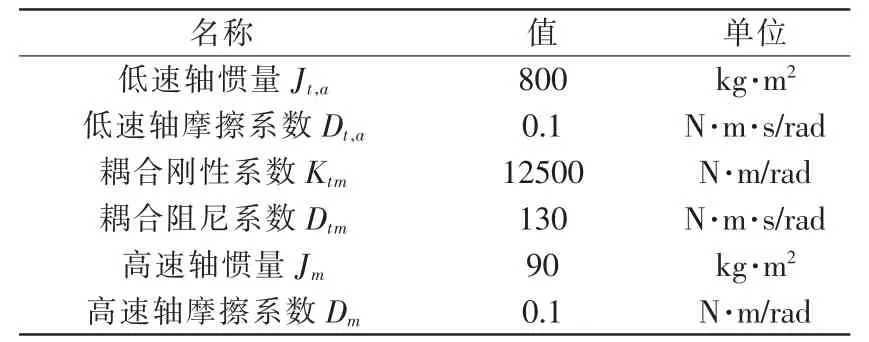
表3 機(jī)械系統(tǒng)參數(shù)Tab.3 Mechanical system parameters
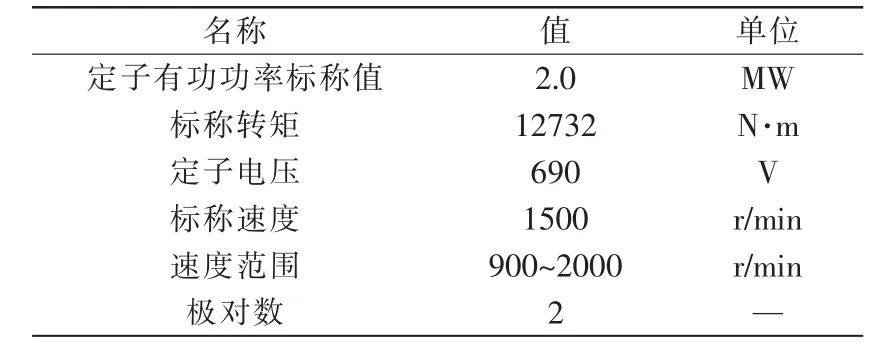
表4 發(fā)電機(jī)的主要特性參數(shù)Tab.4 Main characteristic parameters of generator
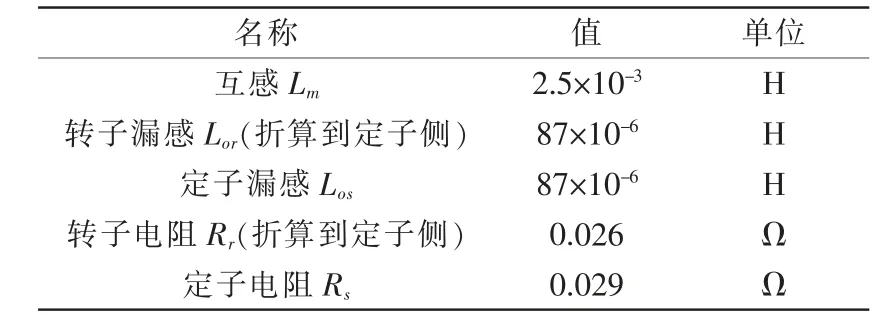
表5 發(fā)電機(jī)等效電路參數(shù)Tab.5 Parameters of generator equivalent circuit
系統(tǒng)初始帶4 MW 負(fù)荷運(yùn)行,10 s 時(shí)系統(tǒng)負(fù)荷增加1.2 MW。考慮不同風(fēng)速區(qū)間DFIG 調(diào)頻的方式不同,選取3 個(gè)具有代表性的風(fēng)速進(jìn)行仿真,仿真結(jié)果如圖7~圖9所示。
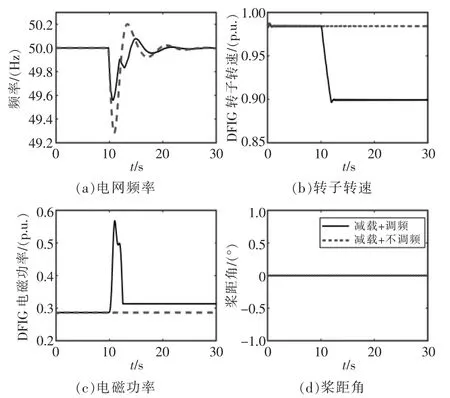
圖7 低風(fēng)速(8 m/s)仿真結(jié)果Fig.7 Simulation results of low wind speed(8 m/s)
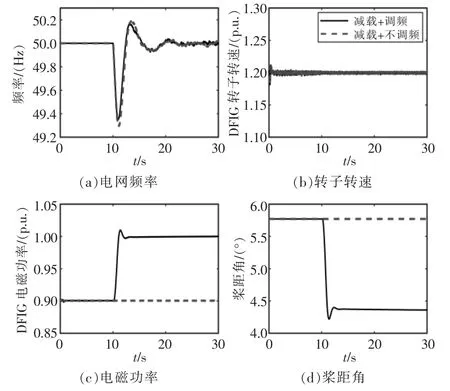
圖9 高風(fēng)速(13 m/s)仿真結(jié)果Fig.9 Simulation results of high wind speed(13 m/s)
由圖7 可知,系統(tǒng)負(fù)荷突然增加且頻率超出死區(qū)頻率時(shí),下垂控制和慣性控制同時(shí)作用,DFIG 轉(zhuǎn)子轉(zhuǎn)速快速下降,風(fēng)輪所捕獲的機(jī)械功率沿減載曲線逐漸上升并釋放轉(zhuǎn)子動(dòng)能,輸出電磁功率快速上升對(duì)系統(tǒng)有功缺額提供暫態(tài)支撐,系統(tǒng)最低點(diǎn)頻率相比DFIG 不調(diào)頻時(shí)有較大提升,當(dāng)轉(zhuǎn)速下降到約0.9 時(shí),此時(shí)轉(zhuǎn)速是風(fēng)速為8 m/s 時(shí)的最優(yōu)轉(zhuǎn)速,不再變化,轉(zhuǎn)子動(dòng)能釋放完畢,不再為系統(tǒng)提供暫態(tài)有功支撐,電磁功率迅速下降至DFIG 穩(wěn)態(tài)運(yùn)行時(shí)輸出的機(jī)械功率值,由于電磁功率的快速下降導(dǎo)致系統(tǒng)頻率二次跌落,此時(shí)DFIG 已達(dá)到當(dāng)前風(fēng)速下所能發(fā)出的最大功率,隨后由同步發(fā)電機(jī)調(diào)頻直至系統(tǒng)頻率回到穩(wěn)態(tài)。
由圖8 可知,系統(tǒng)負(fù)荷增加時(shí),系統(tǒng)頻率、轉(zhuǎn)子轉(zhuǎn)速和電磁功率變化方式和風(fēng)速為8 m/s 相同,區(qū)別在于風(fēng)速為10 m/s 時(shí)DFIG 的備用功率更多,轉(zhuǎn)子轉(zhuǎn)速更大,因此DFIG 參與調(diào)頻時(shí)增發(fā)的機(jī)械功率和轉(zhuǎn)子釋放動(dòng)能提供的電磁功率更多,系統(tǒng)最大頻率偏差減小,當(dāng)轉(zhuǎn)子轉(zhuǎn)速達(dá)到穩(wěn)態(tài)時(shí),系統(tǒng)頻率二次跌落超出調(diào)頻死區(qū),此時(shí)轉(zhuǎn)子轉(zhuǎn)速已達(dá)到最優(yōu)值,風(fēng)輪槳距角開始減小,風(fēng)輪捕獲的機(jī)械功率增加,進(jìn)一步為系統(tǒng)頻率提供支撐。

圖8 中風(fēng)速(10 m/s)仿真結(jié)果Fig.8 Simulation results of medium wind speed(10 m/s)
由圖9 可知,由于此時(shí)轉(zhuǎn)子轉(zhuǎn)速被限制到最大值,不能通過降低轉(zhuǎn)子轉(zhuǎn)速釋放動(dòng)能為系統(tǒng)提供暫態(tài)有功支撐,DFIG 只通過改變槳距角從而改變捕獲的機(jī)械功率來參與系統(tǒng)調(diào)頻,系統(tǒng)頻率最低點(diǎn)下降的最多,但穩(wěn)態(tài)時(shí)DFIG 能夠提供更多的有功功率,減小了同步發(fā)電機(jī)的調(diào)頻壓力。
仿真波形的關(guān)鍵數(shù)據(jù)如表6所示。表中fmin為系統(tǒng)最低點(diǎn)頻率;ΔP穩(wěn)為DFIG 達(dá)到穩(wěn)態(tài)時(shí)的有功功率變化量;ΔP暫為最大暫態(tài)有功功率支撐。
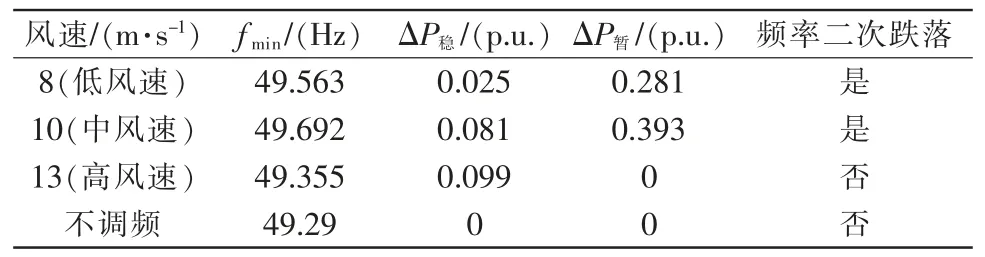
表6 仿真關(guān)鍵數(shù)據(jù)Tab.6 Simulation key data
由表6 可知,DFIG 參與系統(tǒng)調(diào)頻時(shí),系統(tǒng)的暫態(tài)頻率跌落,在中風(fēng)速時(shí)改善最為明顯,低風(fēng)速次之,而高風(fēng)速時(shí)對(duì)暫態(tài)頻率的跌落沒有任何改善,系統(tǒng)達(dá)到穩(wěn)態(tài)時(shí),DFIG 有功功率支撐則為低、中、高風(fēng)速依次增加,符合預(yù)期調(diào)頻效果。
4 結(jié)語
雙饋風(fēng)力發(fā)電機(jī)采用變系數(shù)控制時(shí)能夠根據(jù)風(fēng)速的不同充分利用風(fēng)能響應(yīng)系統(tǒng)的頻率變化,風(fēng)速越大,下垂系數(shù)越大,減載運(yùn)行的雙饋風(fēng)力發(fā)電機(jī)調(diào)頻結(jié)束時(shí)增發(fā)的有功功率越多,減小同步發(fā)電機(jī)組的調(diào)頻壓力。減載控制為雙饋風(fēng)力發(fā)電機(jī)提供了備用容量,能夠有效抑制頻率的二次跌落。慣性控制能夠快速降低轉(zhuǎn)子轉(zhuǎn)速,釋放轉(zhuǎn)子動(dòng)能來響應(yīng)系統(tǒng)頻率變化,改善調(diào)頻效果。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
電網(wǎng)與清潔能源(2015年3期)2015-02-28 16:03:31