六自由度平臺動力學(xué)前饋柔順控制研究
2022-03-29 02:18:48徐海遠(yuǎn)張紅彥
中國機(jī)械工程 2022年6期
關(guān)鍵詞:模型
倪 濤 徐海遠(yuǎn) 李 東 張紅彥
1.燕山大學(xué)車輛與能源學(xué)院,秦皇島,0660042.吉林大學(xué)機(jī)械與航空航天工程學(xué)院,長春,130022
0 引言
現(xiàn)有的裝配機(jī)器人大多是串聯(lián)關(guān)節(jié)機(jī)器人[1-2],但串聯(lián)機(jī)器人承載能力小,一般只能應(yīng)用于小型、輕型零件的裝配[3-4]。與傳統(tǒng)的串聯(lián)機(jī)器人相比,Stewart平臺具有剛度大、負(fù)載能力強、精度高等優(yōu)點[5-6],在大型部件的裝配和航天對接領(lǐng)域應(yīng)用越來越廣泛[7]。在裝配過程中機(jī)器人的末端執(zhí)行器會與環(huán)境接觸,機(jī)器人的運動會受到空間的限制[8-9],因此,需要在控制機(jī)器人位置的同時還要考慮對機(jī)器人與環(huán)境接觸時相互作用力的控制[10-12]。
柔順性是指機(jī)器人在與環(huán)境接觸時能夠?qū)ν獠孔饔昧Ξa(chǎn)生自然順從的能力。針對機(jī)器人的柔順控制,CHEAH等[13]設(shè)計了一種力/位置混合控制方法,該方法將機(jī)器人末端受到的約束力和位置分開控制,進(jìn)行力控制的關(guān)節(jié)不再參與位置的控制,同時參與位置控制的關(guān)節(jié)也不再參與力的控制,從而實現(xiàn)同時控制機(jī)器人末端位置和接觸力的目的。SONG等[14]提出了一種工業(yè)機(jī)器人智能控制方法,它可以跟蹤磨削工藝中工件的形狀以及接觸力不連續(xù)變化,根據(jù)測量數(shù)據(jù)精確控制機(jī)器人的磨削運動。KRONANDER等[15]綜合考慮阻抗控制過程中,剛度、阻尼以及阻尼的時間倒數(shù)等阻抗參數(shù)對機(jī)器人控制系統(tǒng)穩(wěn)定性的影響,提出一種剛度系數(shù)和阻尼系數(shù)可變的阻抗控制方法,仿真結(jié)果表明,該方法增加了系統(tǒng)的靈活性。以上柔順控制方法需要將力/扭矩傳感器安裝在機(jī)械手的末端執(zhí)行器、關(guān)節(jié)或底座上,通過傳感器感知機(jī)器人受到的力,將力偏差作為系統(tǒng)的輸入量,調(diào)整機(jī)器人的位姿。然而,精密的傳感器價格昂貴, 此外,在機(jī)器人關(guān)節(jié)處安裝力傳感器會使關(guān)節(jié)剛度減小,限制機(jī)械手的有效載荷能力和操作環(huán)境。
由于使用傳感器檢測外力具有一定的局限性,相關(guān)學(xué)者提出了無傳感器柔順控制方法。LEE等[16]通過監(jiān)測電機(jī)電流來估計碰撞引起的外部力矩,提出了一種不需要任何傳感器的碰撞檢測方法。DUTTA等[17]提出了一種應(yīng)用在六自由度R-S-S(旋轉(zhuǎn)-球形-球形)結(jié)構(gòu)的并聯(lián)機(jī)械手上的無傳感器主動柔順控制方法,該方法僅基于執(zhí)行器電流反饋估計關(guān)節(jié)扭矩,設(shè)計了一種三層級聯(lián)阻抗控制器,大大節(jié)省了成本。
考慮到在機(jī)器人末端安裝傳感器會使機(jī)器人的承載能力減小,機(jī)器人的制造成本也會大大增加,因此為了解決這個問題,本文在不使用任何外力/力矩傳感器的情況下,提出一種基于摩擦補償?shù)牧杂啥绕脚_柔順控制方法。采集伺服電機(jī)編碼器的數(shù)據(jù),利用庫侖摩擦模型和黏性摩擦模型對伺服電動缸的摩擦力進(jìn)行估算,并通過實驗確定各電動缸的摩擦參數(shù)。最后提出了一種動力學(xué)前饋控制方法,實驗結(jié)果表明該方法在六自由度平臺柔順控制中有效且可靠。
1 理論模型建立
1.1 運動學(xué)模型
本文所研究的Stewart并聯(lián)六自由度平臺是一種6-UPS結(jié)構(gòu)。平臺電動缸與動平臺通過球鉸連接,與固定平臺通過萬向節(jié)連接。點ai和bi(i=1,2,…,6)表示球形接頭和萬向節(jié)的中心。
固定坐標(biāo)系Bxyz和移動坐標(biāo)系Px′y′z′如圖1所示,x軸是b1b2的中垂線,z軸垂直于固定基座的平面,y軸由右手定則確定。x′軸是a1a2的中垂線,z′軸向上并垂直于移動平臺的平面,y′軸由右手定則確定。

圖1 Stewart平臺結(jié)構(gòu)圖Fig.1 Structure diagram of Stewart platform
定義廣義坐標(biāo)向量q=(x,y,z,φ,θ,φ)T,其中,(x,y,z)表示移動坐標(biāo)系{P}相對于固定坐標(biāo)系{B}的位置,(φ,θ,φ)表示移動坐標(biāo)系{P}相對于固定坐標(biāo)系{B}的空間姿態(tài)[18]。
為了避免奇異位置在平臺正常工作的情況下出現(xiàn),可以采用Z—X—Z歐拉角的坐標(biāo)變換順序,即移動坐標(biāo)系Px′y′z′相對于固定坐標(biāo)系Bxyz的姿態(tài)可以通過繞z′軸旋轉(zhuǎn)φ角度,然后繞x′軸旋轉(zhuǎn)θ角度,最后繞z′軸旋轉(zhuǎn)φ角度得到。移動坐標(biāo)系{P}相對于固定坐標(biāo)系{B}的旋轉(zhuǎn)矩陣可以表示為
BRP=
(1)
式中,c表示cos函數(shù),s表示sin函數(shù)。
(2)
(3)
(4)
(5)


圖2 坐標(biāo)系分配[20]Fig.2 Coordinate system assignment[20]
1.2 動力學(xué)模型
選擇拉格朗日方程作為Stewart平臺的動力學(xué)方程[21-23]:
(6)
τ=(fx,fy,fz,τφ,τθ,τφ)T
(7)
(8)
(9)

設(shè)Fd=(f1,f2,…,f6)T表示電動缸伸縮桿的驅(qū)動力矢量,則τ和Fd之間轉(zhuǎn)換關(guān)系為
τ=(J-1)TFd
(10)
式(6)表示末端姿態(tài)的廣義向量q的動力學(xué)方程,把它轉(zhuǎn)換到關(guān)節(jié)空間中,有
(11)
Ml(l)=JTM(q)J
(12)
(13)
Gl(l)=JTG(q)
(14)
2 基于摩擦補償?shù)膭恿W(xué)前饋控制
2.1 摩擦模型
Stewart平臺的摩擦包括電機(jī)的摩擦和滾珠絲杠與螺母接觸面相對運動的摩擦。在研究電動缸運動的摩擦力時,可以把這兩部分摩擦力作為一個整體來研究。動態(tài)摩擦模型雖然能較準(zhǔn)確地描述摩擦特性,但它具有摩擦參數(shù)多、辨識困難等特點,不適合實際應(yīng)用。表達(dá)摩擦的經(jīng)典模型之一是庫侖摩擦模型,并且?guī)靵瞿Σ聊P瓦M(jìn)一步發(fā)展為由庫侖摩擦、黏性摩擦和Striebeck摩擦組成的靜摩擦模型[24]。本文采用圖3中的庫侖和黏性摩擦模型,該模型簡化了低速的非線性區(qū)域,對高速區(qū)域使用黏性摩擦模型可以更準(zhǔn)確地描述摩擦力與速度的線性關(guān)系[25]。

(a)庫侖摩擦 (b)黏性摩擦
庫侖摩擦和黏性摩擦數(shù)學(xué)模型用公式表示為
(15)
(16)
式中,F(xiàn)f為總摩擦力;Fc為庫侖摩擦力;fv為黏性摩擦系數(shù);v為滾珠絲杠與螺母之間的相對速度;P為滾珠絲杠的導(dǎo)程;ωm為電機(jī)的角速度,由于沒有減速機(jī),滾珠絲杠的角速度等于電機(jī)的角速度。
溫淑煥[26]將電機(jī)的轉(zhuǎn)動慣量和滾珠絲杠的轉(zhuǎn)動慣量合并,建立了滾珠絲杠在運動過程中考慮摩擦的運動學(xué)模型:
(17)
式中,Td為電磁轉(zhuǎn)矩;Jm、JL分別為電機(jī)的轉(zhuǎn)動慣量和滾珠絲杠的轉(zhuǎn)動慣量;Tvf、Tcf、TL分別為伺服運動系統(tǒng)的黏性摩擦力矩、庫侖摩擦力矩和滾珠絲杠的負(fù)載力矩。
系統(tǒng)的受力力矩T與受力F之間關(guān)系如下:
(18)
式中,η為滾珠絲杠的傳動效率。
2.2 動力學(xué)前饋控制
柔順控制主要用于機(jī)器人與環(huán)境相互作用的工作場合,可以減少機(jī)器人與環(huán)境之間的接觸力,保證機(jī)器人工作過程的安全性和可靠性[27]。在實際應(yīng)用中,柔順運動平臺的速度較小,一般可以忽略科氏力和離心力的影響,此時只要補償了平臺自身的重力和摩擦力,平臺就可以跟隨外力進(jìn)行柔順運動。

Fd=Gl(l)=JTG(q)
(19)
在力矩模式下,可以通過伺服電機(jī)的編碼器獲得電機(jī)的轉(zhuǎn)角。將電機(jī)轉(zhuǎn)角代入正運動學(xué)公式,得到Stewart平臺的末端位姿,然后將平臺末端的位姿信息代入逆動力學(xué),得到6個電動缸的驅(qū)動力Fd,最后計算出電機(jī)的重力項力矩TG。TG和Fd之間的關(guān)系可通過式(18)得到。動力學(xué)前饋控制器的總體框圖見圖4,其中,Te為PID控制器根據(jù)位置偏差計算的力矩值。

圖4 動力學(xué)前饋控制框圖Fig.4 Control framework for dynamic feedforward

(20)
當(dāng)平臺向下運動時,電機(jī)的驅(qū)動力矩Tm為
(21)
式中,Kp、Ki、Kd分別是比例系數(shù)、積分系數(shù)和微分系數(shù);e(k)為期望的電動缸的長度與當(dāng)前實際電動缸的長度的差值。
本文提出的柔順控制方法利用PID控制律對關(guān)節(jié)的位置進(jìn)行控制,實現(xiàn)對末端位姿的精確跟蹤,此外由于采用了PID控制方法,可以使平臺在力消除后回到初始姿態(tài)。式(4)用于計算6個電動缸的速度,當(dāng)受到外力作用時,平臺的位置會發(fā)生微小的變化,動力學(xué)模型和摩擦模型描述了該位置的轉(zhuǎn)矩,反饋作用于電機(jī)。平臺受到外力時會順應(yīng)外力移動。
3 實驗
為了驗證所提出的Stewart平臺動態(tài)前饋控制算法,搭建了實驗平臺系統(tǒng),實驗系統(tǒng)示意見圖5。

圖5 實驗系統(tǒng)示意圖Fig.5 Schematic of experimental system
實驗系統(tǒng)采用Stewart平臺作為驅(qū)動機(jī)構(gòu)。驅(qū)動電動缸的電機(jī)為INVT的SV-ML08-0R7G-2-1A0-100X,額定轉(zhuǎn)速為3000 r/min,采用CANET-8E-U通信板進(jìn)行數(shù)據(jù)傳輸,滿足同步性和實時性的要求。最后,采用ISV-DA200伺服驅(qū)動作為實時控制系統(tǒng),實現(xiàn)更精確的定位和與CAN板的連接。系統(tǒng)的性能指標(biāo)如表1所示。

表1 Stewart平臺性能指標(biāo)
實驗一是對摩擦參數(shù)進(jìn)行辨識,采用離線參數(shù)辨識方法。以電動缸1為例,將無外部負(fù)載的電動缸拆下并水平放置。在位置控制模式下,從低到高等間隔發(fā)出速度指令(-10~10 rad/s),然后在系統(tǒng)穩(wěn)定運行時通過編碼器反饋值讀取電磁轉(zhuǎn)矩,此時獲得的電磁轉(zhuǎn)矩近似等于摩擦轉(zhuǎn)矩。當(dāng)電機(jī)工作時電磁轉(zhuǎn)矩不是一個固定的數(shù)字,因此,當(dāng)電動機(jī)以一定速度運動時,有必要收集盡可能多的數(shù)據(jù),并找出這些數(shù)據(jù)的平均值作為該速度下的電磁轉(zhuǎn)矩。電動缸實際測量的摩擦力矩離散數(shù)據(jù)如圖6所示。用最小二乘法對測量的離散數(shù)據(jù)進(jìn)行線性擬合,可以求得直線的斜率和截距。直線的斜率表示黏性摩擦系數(shù),截距表示庫侖摩擦力矩。參數(shù)辨識結(jié)果如表2所示。

圖6 離線摩擦參數(shù)辨識Fig.6 Off-line friction identification
第二個實驗在力矩模式下進(jìn)行,分析電機(jī)轉(zhuǎn)矩誤差。給定沿z軸的正弦位置信號輸入,分別采集6臺電機(jī)的力矩反饋數(shù)據(jù)。從收集的數(shù)據(jù)中減去重力產(chǎn)生的力矩和摩擦力矩,結(jié)果如圖7所示。結(jié)果表明,1、3、6缸電機(jī)力矩控制偏差均值為0.1 N·m,2、4、5缸電機(jī)力矩控制偏差均值為0.2 N·m,電機(jī)力矩誤差值主要與摩擦轉(zhuǎn)矩識別的精度有關(guān),其次與動力學(xué)參數(shù)的準(zhǔn)確性和電動缸的機(jī)械變形有關(guān)。

(a)電動缸1力矩補償曲線 (b)電動缸2力矩補償曲線 (c)電動缸3力矩補償曲線
動力學(xué)前饋控制對六自由度平臺的摩擦項和重力項進(jìn)行了補償,平臺受到外力時會沿著力的方向移動。一旦外力被移除,動力學(xué)前饋控制將產(chǎn)生收縮軌跡,使Stewart平臺返回到受力前的初始位姿。為了驗證這種柔順運動,進(jìn)行了以下實驗。圖8顯示了x軸方向的水平力作用在上部平臺上時,在動力學(xué)前饋控制過程中電動缸1、3、5的實際扭矩。該圖可分為三個階段:①力矩控制模式的靜態(tài)狀態(tài),發(fā)送給電機(jī)的轉(zhuǎn)矩消除了Stewart平臺的重力和摩擦力,反饋力矩約為零;②柔順階段,對末端執(zhí)行器施加外力時,末端執(zhí)行器將沿所施加力的方向順應(yīng)地移動;③恢復(fù)階段,當(dāng)力被撤去時,Stewart平臺會恢復(fù)到原始狀態(tài)。
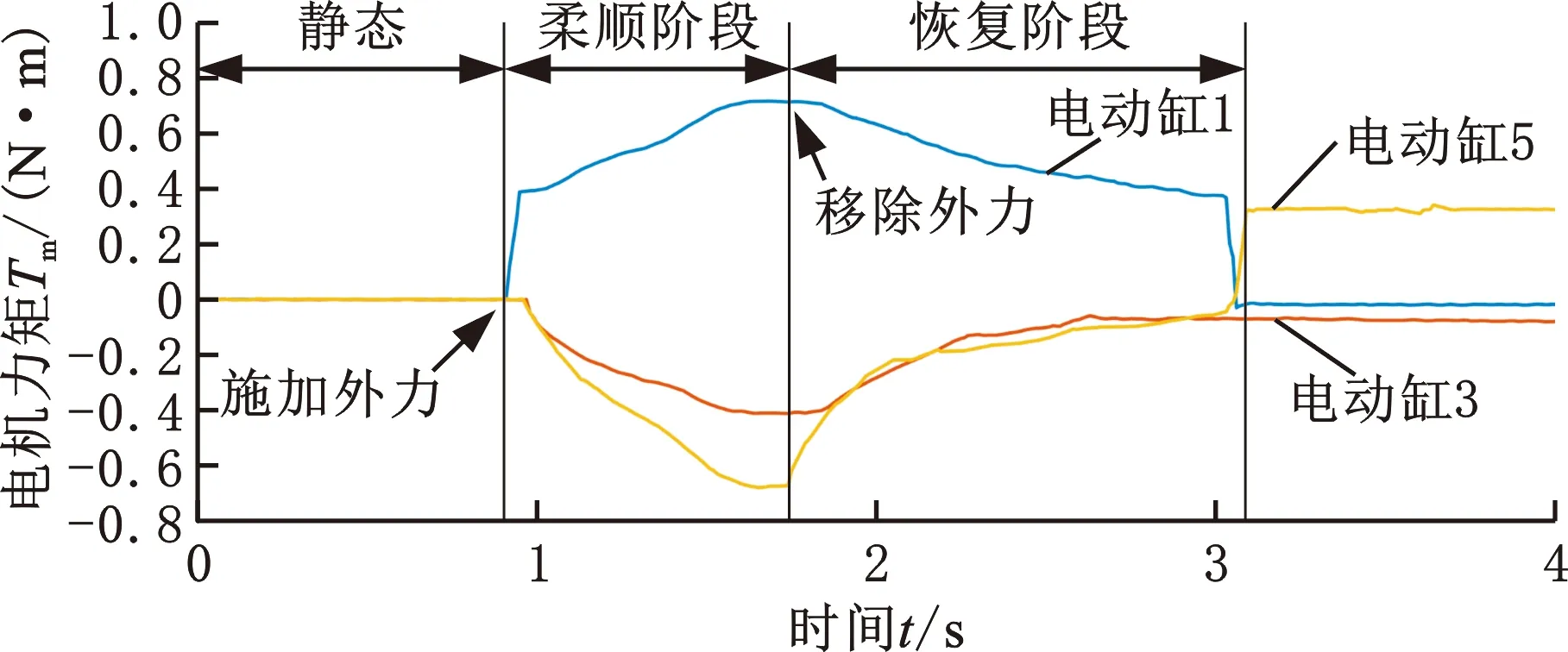
圖8 柔順控制期間的電動缸1,3,5力矩Fig.8 Joint 1,3,5 torques during compliant control
根據(jù)圖1所示的Stewart平臺結(jié)構(gòu),當(dāng)動平臺向x軸方向移動時,電動缸1收縮,電機(jī)的力矩為正,電動缸3、5伸長,電機(jī)的力矩為負(fù)。
使用圖5所示的實驗裝置,通過在Stewart平臺上施加外力來驗證柔順運動的準(zhǔn)確性。在上平臺施加沿x軸方向的水平外力,實驗的完整步驟如圖9a所示。收集每個電動缸的伸長量,通過運動學(xué)計算上平臺中心點的坐標(biāo)。由圖9b可以明顯看出,上平臺中心點的位置沿力的方向移動,當(dāng)力被移除時,它會返回到原來的位置,驗證了所提方法的正確性。施加沿x軸方向的水平外力,則沿x軸方向的偏移最大,y軸方向的跟蹤誤差在0.01~0.02 m范圍內(nèi),z軸方向的跟蹤誤差在0.005~0.01 m范圍內(nèi)。

(a)柔順控制操作連續(xù)步驟照片
4 結(jié)論
本文提出了一種基于摩擦補償?shù)腟tewart平臺柔順控制策略。首先在離線狀態(tài)下,利用庫侖摩擦模型和黏性摩擦模型估計出各個電動缸的摩擦力,然后在整體動力學(xué)模型中補償平臺的重力和摩擦力,提出了一種動力學(xué)前饋控制方法,使機(jī)器人在不使用任何力傳感器的情況下就能夠在外力作用下柔順地運動。通過實驗測量出了電動缸的摩擦模型,并驗證了柔順控制的有效性。串聯(lián)機(jī)器人一般不適用于大型工件的裝配,而在并聯(lián)機(jī)器人上安裝高精度傳感器成本較高,所提出的動力學(xué)前饋柔順控制方法可以發(fā)揮重要作用,減少運動過程中突然的剛性碰撞所造成的危害。后續(xù)將考慮如何提高摩擦估算模型的精度,以提高平臺的穩(wěn)定性。此外,還要對實際裝配過程中受力情況進(jìn)行深入研究,達(dá)到柔順裝配。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
