兩種偽距IFB模型在多系統(tǒng)融合精密單點定位中的性能分析
2022-03-29 03:15:40熊永良秦星敏
大地測量與地球動力學(xué) 2022年4期
趙 班 熊永良 秦星敏
1 西南交通大學(xué)地球科學(xué)與環(huán)境工程學(xué)院,成都市犀安路999號,611756
精密單點定位(PPP)技術(shù)[1]僅采用單臺接收機即可獲得高精度位置參數(shù),具有精度高、不受地理位置限制等特點,還可以提供額外參數(shù)用于物理、氣象等其他方面研究[2]。目前全球衛(wèi)星系統(tǒng)主要有GPS、GLONASS、Galileo和BDS,由于測站分布和衛(wèi)星星座幾何分布存在差異,各衛(wèi)星系統(tǒng)在定位精度和收斂時間方面表現(xiàn)各不相同,為得到穩(wěn)定精確的坐標,融合多系統(tǒng)的PPP應(yīng)運而生。多數(shù)研究選擇忽略偽距IFB誤差或按照頻率號的一次線性函數(shù)估計載波IFB[3-6]。Zhou等[7]總結(jié)各衛(wèi)星系統(tǒng)的最優(yōu)偽距IFB模型,但僅對GLONASS單系統(tǒng)和GPS/GLONASS組合系統(tǒng)進行分析。同時大多數(shù)研究采用的組合觀測值會放大噪聲誤差,也無法對其他參數(shù)進行估計。
因此,本文提出多系統(tǒng)非差非組合PPP函數(shù)模型,對兩種IFB模型在不同衛(wèi)星組合模式下的定位精度和收斂速度進行統(tǒng)計分析。
1 多系統(tǒng)融合PPP的函數(shù)模型
線性化后不同衛(wèi)星系統(tǒng)的偽距和載波觀測方程可表示為:
(1)
(2)
為方便理解,通常對符號進行如下定義:
(3)

由于在PPP中已使用基于無電離層模型計算的精密衛(wèi)星鐘差產(chǎn)品,因此其提供的衛(wèi)星鐘差產(chǎn)品包含衛(wèi)星端UCDs的線性組合[8]。將式(3)代入式(1)和式(2)可得:
(4)
(5)
2 系統(tǒng)偏差I(lǐng)SB
在進行多系統(tǒng)融合PPP時,需要考慮不同衛(wèi)星系統(tǒng)間的系統(tǒng)偏差I(lǐng)SB,ISB可看作為不同衛(wèi)星系統(tǒng)接收機鐘差的差異[6],需要選擇一個衛(wèi)星系統(tǒng)作為基準。例如以GPS為基準,則GLONASS衛(wèi)星的ISB參數(shù)為:
(6)

3 兩種偽距IFB模型
3.1 第一種偽距IFB模型
第一種模型是對每個GLONASS衛(wèi)星估計一個IFB參數(shù):
(7)

(8)

3.2 第二種偽距IFB模型
第二種模型是用頻率號的一次線性函數(shù)來估計偽距IFB參數(shù):
(9)

(10)

4 兩種偽距IFB模型性能分析
為研究兩種偽距IFB模型在多系統(tǒng)融合PPP中的性能,隨機選取52個MGEX測站在2020-04-09~15期間的數(shù)據(jù)(采樣間隔為30 s)進行分析。在進行數(shù)據(jù)解算時發(fā)現(xiàn)有些測站大部分歷元搜索到的GLONASS衛(wèi)星個數(shù)小于4,在數(shù)理統(tǒng)計上無意義,因此僅對G/R、R/B、R/E、G/R/B、G/R/E、R/B/E和G/R/B/E等衛(wèi)星組合模式進行性能評定。將不同組合估計的坐標與IGS周解坐標[10]進行對比,獲得E、N、U三個方向上的坐標殘差,并分析不同組合模式在靜態(tài)和動態(tài)條件下采用不同偽距IFB模型對定位精度和收斂時間的影響。
4.1 靜態(tài)定位精度分析
圖1和圖2為不同組合模式下兩種偽距IFB模型在靜態(tài)條件下的定位精度。從圖中可以看出,兩種偽距IFB模型的定位精度在3個方向上大致相當。在E方向上,R/B、R/B/E組合第二種模型的精度略優(yōu)于第一種模型,其他組合精度相當;在N方向上,R/B組合第二種模型的精度略優(yōu)于第一種模型,其他組合精度相當;在U方向上,R/B、R/E、R/B/E第二種模型的精度略優(yōu)于第一種模型,其他組合精度相當。綜上所知,在衛(wèi)星數(shù)量較少的情況下,第一種偽距IFB模型的參數(shù)個數(shù)多于第二種模型,從而使定位精度降低。
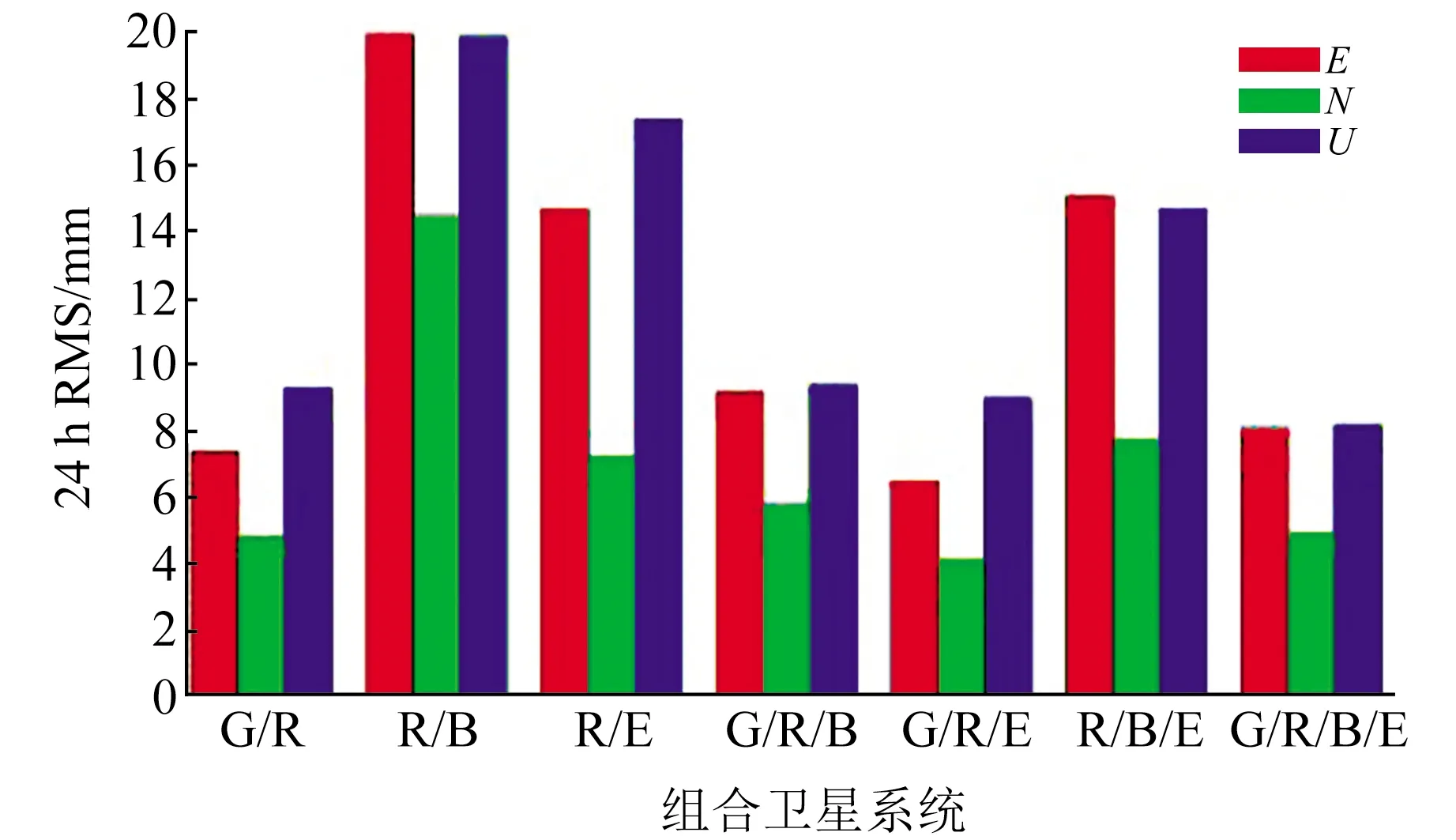
圖1 第一種IFB模型靜態(tài)定位結(jié)果
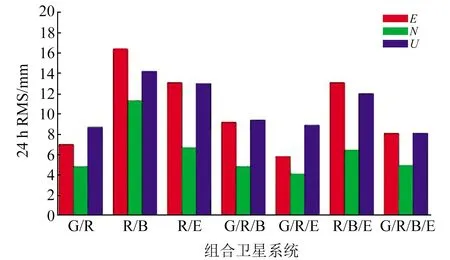
圖2 第二種IFB模型靜態(tài)定位結(jié)果
4.2 動態(tài)定位精度分析
圖3和圖4為不同組合模式下兩種偽距IFB模型在動態(tài)條件下的定位精度。通過對比可知,在N方向上,第二種IFB模型的定位精度比第一種模型提升約21%;在E方向上,R/E組合第二種模型的定位精度優(yōu)于第一種模型;在U方向上,R/E、R/B、R/B/E組合第二種模型的定位精度優(yōu)于第一種模型。其他組合在E、U方向上定位精度大致相當。
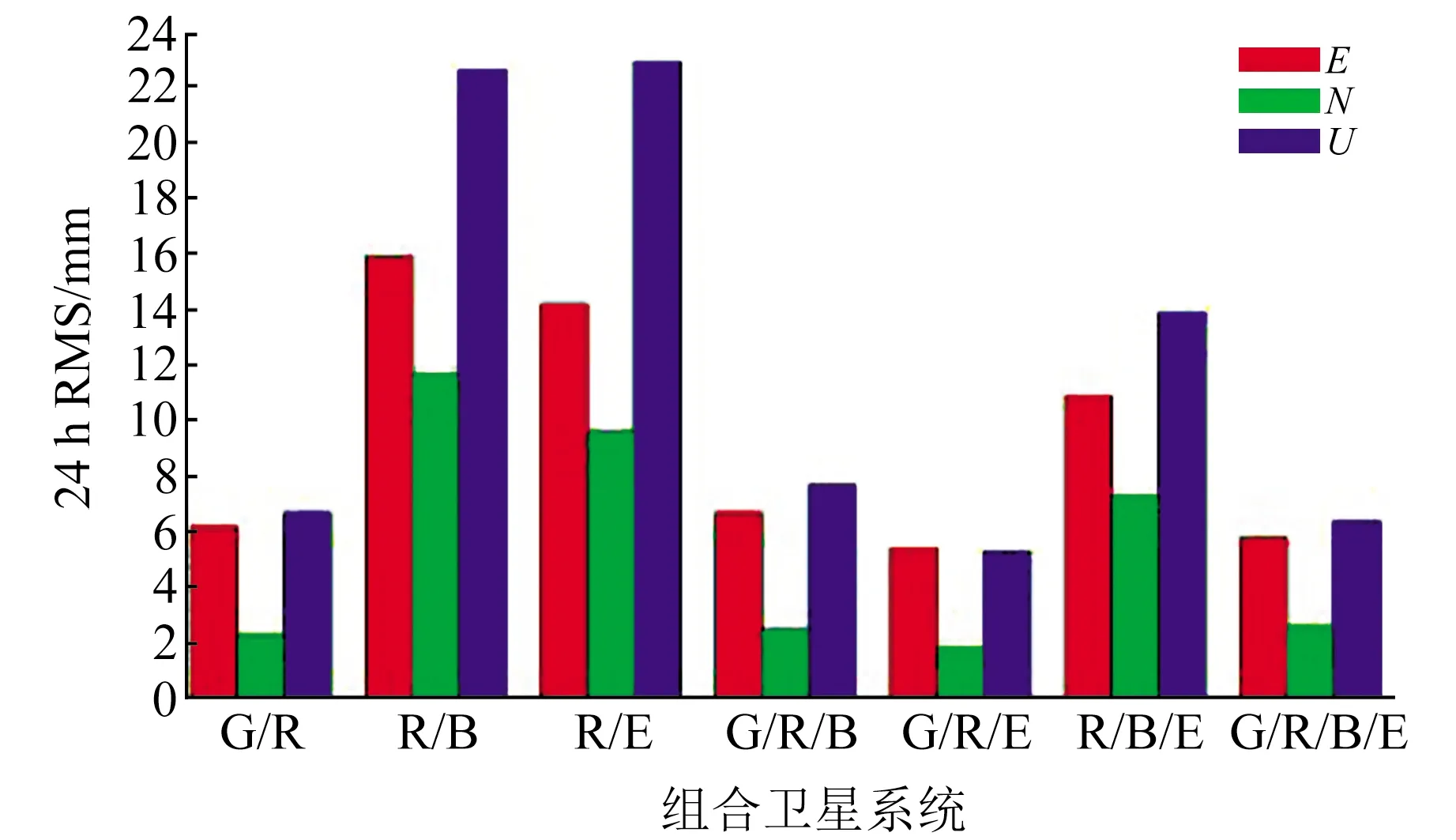
圖3 第一種IFB模型動態(tài)定位結(jié)果
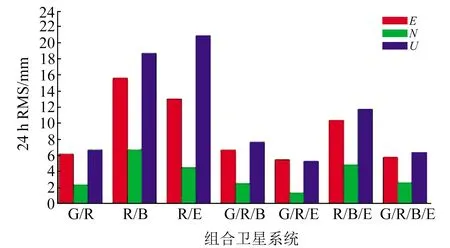
圖4 第二種IFB模型動態(tài)定位結(jié)果
4.3 收斂速度分析
為評估兩種偽距IFB模型在多系統(tǒng)融合PPP中的收斂速度,將收斂時間定義為:68%和95%的總測站在3個方向上均達到一定精度并在隨后的一段時間內(nèi)保持穩(wěn)定所需的時間。靜態(tài)條件下3個方向上精度達到0.03 m并在隨后至少20個歷元內(nèi)保持穩(wěn)定的歷元時間為收斂時間,動態(tài)條件下3個方向上精度達到0.1 m并在隨后至少20個歷元內(nèi)保持穩(wěn)定的歷元時間為收斂時間。表1~7(單位min)分別為G/R、R/B、R/E、G/R/B、G/R/E、R/B/E和G/R/B/E在靜態(tài)和動態(tài)條件下3個方向上的收斂時間。
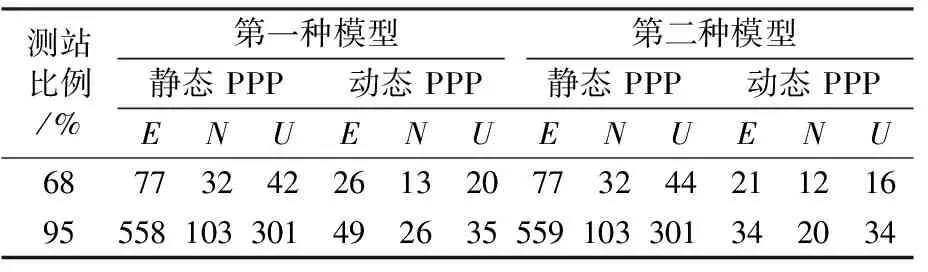
表1 G/R收斂時間
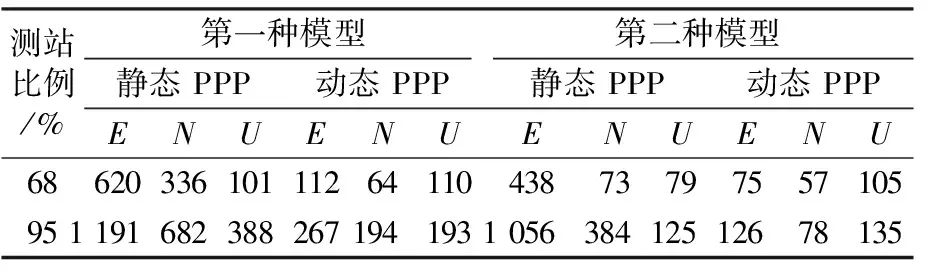
表2 R/B收斂時間
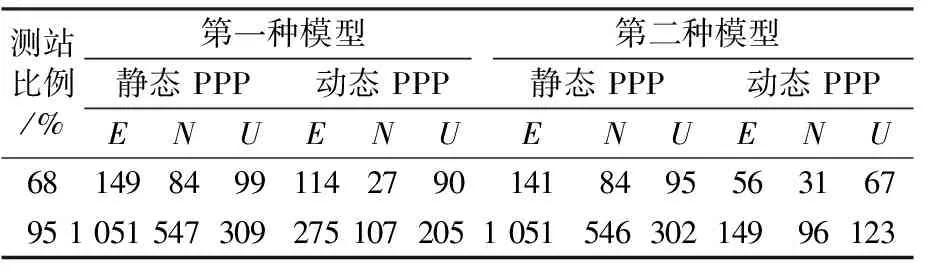
表3 R/E收斂時間
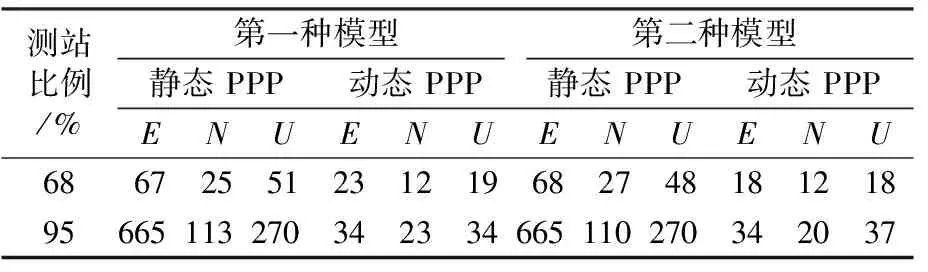
表4 G/R/B收斂時間
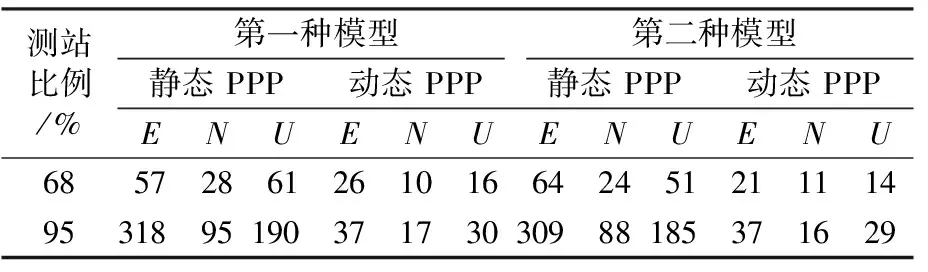
表5 G/R/E收斂時間
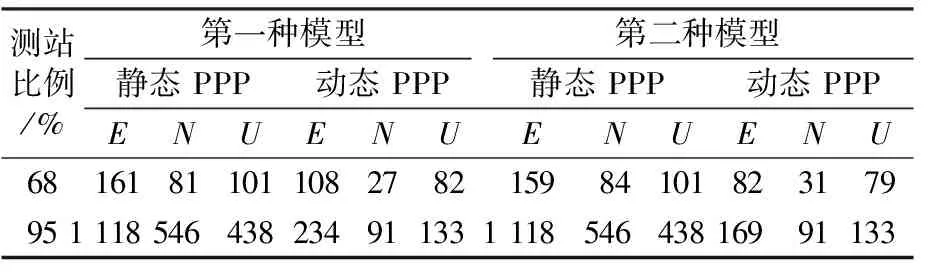
表6 R/B/E收斂時間
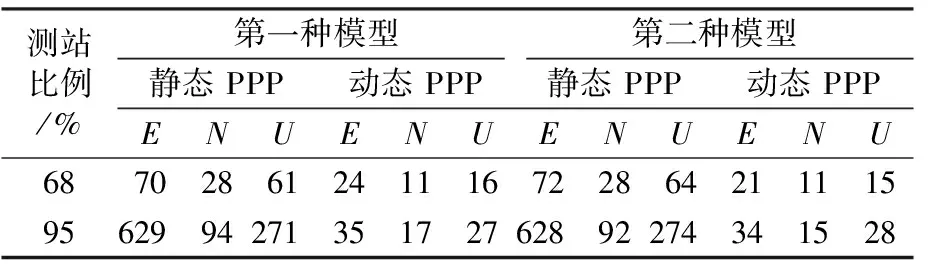
表7 G/R/B/E收斂時間
由表1~7可知,在包含GPS星座的組合中,第一種模型在部分方向的收斂速度略快于第二種模型,但提升幅度有限。原因可能為GPS衛(wèi)星在全球分布較廣,每個歷元能觀測到的GPS衛(wèi)星數(shù)目較多且隨時間變化較小。但其他不包含GPS衛(wèi)星的組合在動態(tài)條件下第一種模型的收斂速度普遍比第二種模型慢,且部分方向的收斂速度相差巨大。原因主要為第一種偽距IFB模型包含大量被估參數(shù),并且該組合的衛(wèi)星會受到地域、時間等因素影響,每個歷元觀測到的可用衛(wèi)星數(shù)量變化很大,數(shù)值解不穩(wěn)定。
5 結(jié) 語
1)靜態(tài)條件下,兩種偽距IFB模型在3個方向上定位精度相當;動態(tài)條件下,兩種偽距IFB模型在E、U方向上精度相當,第二種IFB模型能夠提高N方向上定位精度,提升幅度約為21%。
2)兩種模型在不同衛(wèi)星組合模式下的收斂速度略有不同。包含GPS星座的組合在靜態(tài)和動態(tài)條件下第一種模型的收斂速度在部分方向上略快于第二種模型,但提升效果有限;不包含GPS星座的組合第一種模型的收斂速度在3個方向上普遍比第二種模型慢,且部分方向的收斂速度相差巨大。
3)兩種偽距IFB模型在3個方向上均可達到設(shè)定精度,但第一種模型會增加被估參數(shù)的個數(shù),這在數(shù)值運算中會影響解算精度,特別是在觀測方程較少的情況下。因此從模型簡易程度、定位精度和收斂時間等方面考慮,第二種偽距IFB模型要優(yōu)于第一種偽距IFB模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45