無人水下航行器全局路徑規劃及有限時間跟蹤控制
2022-04-02 23:10:22滕建平梁霄陶浩龔俊斌曲星儒
上海海事大學學報 2022年1期
滕建平 梁霄 陶浩 龔俊斌 曲星儒
摘要:為解決復雜航行環境下無人水下航行器(unmanned underwater vehicle, UUV)路徑規劃及跟蹤控制問題,提出一種考慮避障的全局路徑規劃策略及實現有限時間精確路徑跟蹤的控制方法。基于改進人工勢場法得到一條可跟蹤且避免碰撞的全局路徑,為UUV實現精確路徑跟蹤奠定基礎。
引入Serret-Frenet坐標系,并設計用于路徑規劃的視線(line-of-sight,LOS)制導方法。基于非奇異終端滑模控制設計UUV控制律,確保系統誤差可以在有限時間內趨近于零。基于李雅普諾夫穩定性理論證明所設計控制系統的穩定性,仿真實驗驗證了所設計的UUV路徑規劃及跟蹤控制方法的有效性。路徑規劃模塊與路徑跟蹤模塊有效結合更加符合實際UUV工作環境的需要,具有重要的實際意義。
關鍵詞:
無人水下航行器; 全局路徑規劃; 跟蹤控制; 人工勢場法; 非奇異終端滑模
中圖分類號:? U674.941; U664.82
文獻標志碼:? A
Global path planning and finite-time tracking control of
unmanned underwater vehicles
TENG Jianping1, LIANG Xiao1, TAO Hao2, GONG Junbin2, QU Xingru1
(1.Naval Architecture and Ocean Engineering College, Dalian Maritime University, Dalian 116026,
Liaoning, China; 2.China Ship Research and Design Center, Wuhan 430064, China)
Abstract:
To solve the problem of path planning and tracking control of unmanned underwater vehicles (UUVs) in complex navigation environment, this paper presents a global path planning strategy considering obstacle avoidance and a control method to realize finite-time accurate path tracking. Based on the improved artificial potential field method, a global path that can be tracked and avoid collision is obtained, which lays the foundation for the accurate path tracking of UUVs. The Serret-Frenet coordinate system is introduced and the line-of-sight (LOS) guidance law is designed for the path planning. The UUV control law is designed based on the non-singular terminal sliding mode control, which can ensure that the system error converges to zero within a finite time. The stability of the designed control system is proved based on the Lyapunov stability theory, and the simulation results show the effectiveness of the designed path planning and tracking control method. The effective combination of the path planning module and the path tracking module is more in line with the needs of the actual UUV working environment, which has important practical significance.
Key words:
unmanned underwater vehicle; global path planning; tracking control; artificial potential field method; non-singular terminal sliding mode
0 引 言
無人水下航行器(unmanned underwater vehicle, UUV)在水文調查、海洋勘探、救助打撈作業中有非常重要的應用,近年來UUV路徑規劃及跟蹤成為研究熱點。然而,由于UUV自身的水動力特性復雜,各個自由度之間耦合性強,同時還受到不確定的水下環境(如海流、波浪等)的干擾,UUV系統具有較強的非線性、耦合性以及模型不確定性[1-2]。
目前,模糊控制法[3-4]、遺傳算法[5]、人工勢場法[6-9]等智能優化算法被廣泛應用到路徑規劃中。林政等[3]考慮障礙物所有分布情況設計模糊推理規則表,使航行器能夠根據環境變化調整航速,增強了航行器對未知、復雜環境的適應能力。考慮海洋環境的特殊性對航行器路徑規劃的影響,YAO等[5]對遺傳算法中的變異因子進行改進,規劃出最優的路徑。YANG等[9]針對人工勢場法目標不可達問題,通過引入相對速度和相對距離來改進勢場函數。gzslib202204031033跟蹤控制問題作為構建UUV系統的基礎,近年來已成為各國學者研究的熱點,并取得了豐富的研究成果[10]。目前,常見的跟蹤控制方法有反步控制[11-12]、神經網絡控制[13]、滑模變結構控制等[14-15]。LAPIERRE等[11]針對水下航行器的水平面路徑跟蹤問題,基于虛擬向導建立路徑跟蹤誤差方程,基于反步法設計艏向控制器。邊信黔等[14]采用滑模變結構控制方法進行水下航行器路徑跟蹤控制器設計,并考慮了航行器模型參數不確定性和海流干擾的影響,減小了輸出反饋控制的穩態誤差和超調問題。霍宇彤等[15]引入Serret-Frenet局部坐標系和視線(line-of-sight, LOS)制導律,將路徑跟蹤的位置誤差鎮定轉換為視線角誤差鎮定,并通過引入徑向基函數(radial basis function, RBF)神經網絡和積分滑模面,設計動力學路徑跟蹤控制器。高劍等[16]利用非線性系統級聯的方法,將三維直線跟蹤系統誤差模型分解為一個獨立的垂直面運動系統和一個受垂直面運動擾動的水平面運動系統,級聯系統不需要設計整個系統的李雅普諾夫函數,控制律設計更加簡潔。王宏健等[17]針對欠驅動水下航行器的三維直線路徑跟蹤問題,引入虛擬向導建立了三維航跡誤差模型,合理選擇控制器參數,消除了非線性項,簡化了控制器設計步驟。
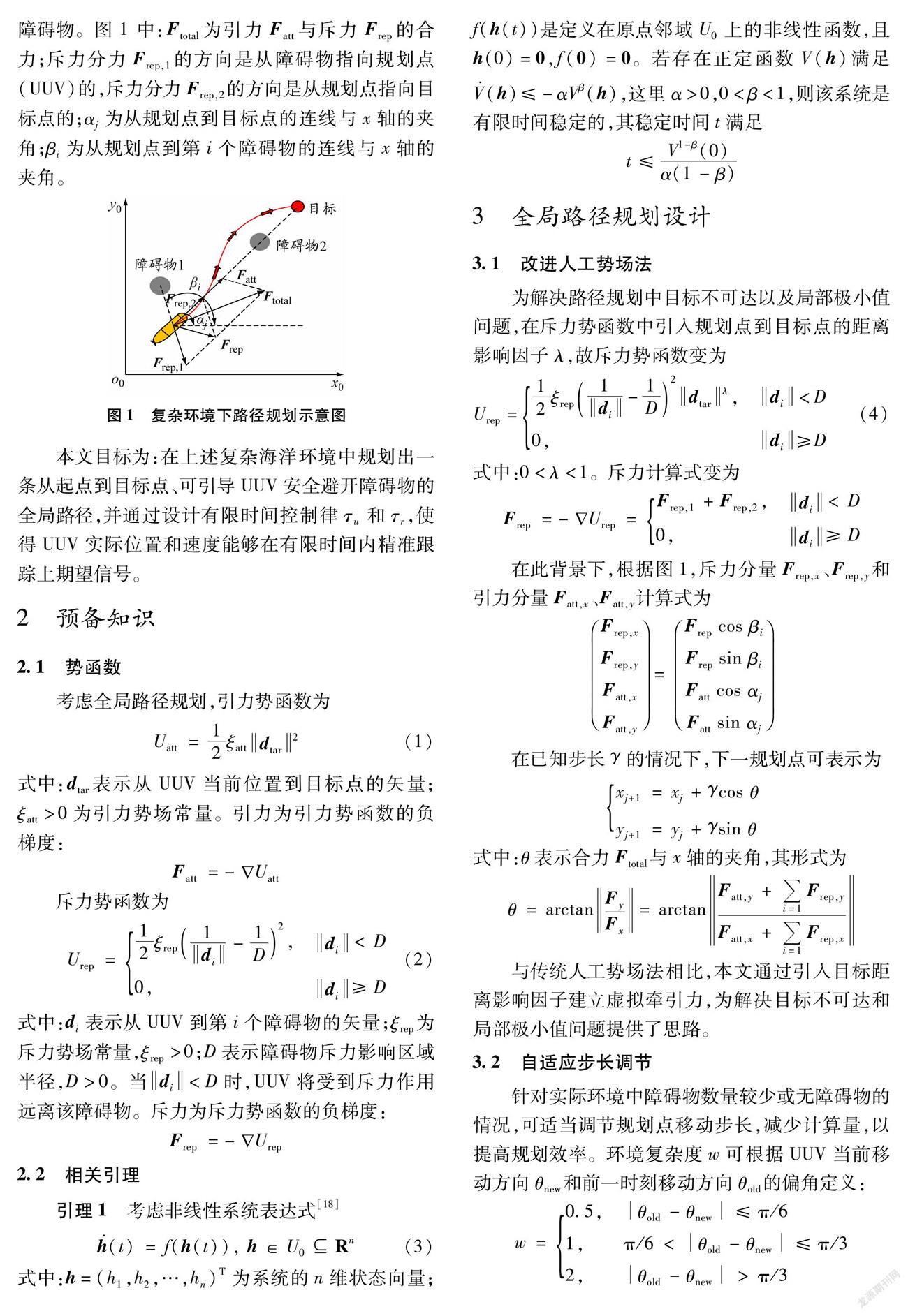
鑒于此,本文在傳統人工勢場法的基礎上,引入目標點距離影響因子以避免出現局部極小值和目標不可達問題,考慮路徑規劃的復雜度,設計自適應步長調節,實現復雜海洋環境下的路徑規劃;其次通過引入Serret-Frenet坐標系,設計基于路徑規劃的LOS制導方法,以免UUV距離期望路徑過遠而無解。考慮模型參數攝動問題,基于非奇異終端滑模設計全局有限時間控制律,確保系統誤差在有限時間內收斂到零。基于李雅普諾夫穩定性理論證明所設計控制系統的穩定性,仿真實驗表明所設計的UUV路徑規劃及跟蹤控制方法的有效性。
5 仿真實驗
為驗證路徑規劃及控制策略的有效性,選取文獻[20]的UUV進行仿真實驗。
全局路徑規劃中:初始位置為A0(31 m,34 m),目標位置為Atar(900 m,930 m);
障礙物位置分別為O1(400 m,400 m),O2(500 m,590 m)和
O3(800 m,800 m);路徑規劃參數ξatt=8,ξrep=3,D=35 m,γ=0.8 m。
UUV期望速度為ud=1 m/s;初始狀態為x(0)=0,y(0)=5 m,Ψ(0)=120°,u(0)=0,v(0)=
0,r(0)=0;控制器參數設置為μ1=0.5,p1=7,q1=5,σ1=3.5,μ2=1,μ3=2,p2=7,q2=5,σ2=10。模型參數存在10%的攝動,仿真結果見圖3~10。
從圖3可以看出,基于改進的勢場法得到了一條全局避障路徑。圖4給出UUV跟蹤上述規劃路徑的行為曲線。由圖4可見,本文設計的有限時間控制律可以實現快速、精確的路徑跟蹤控制。由圖5和6可以看出誤差出現在起點以及路徑切換的位置。圖7為縱向跟蹤和橫向跟蹤誤差曲線,其中誤差不為零且波動的情況主要是由規劃路徑的切換造成的。
除位置跟蹤外,本文在前進推力和偏航力矩控制律下,實現了速度和艏向角跟蹤。由圖8和9可知,所設計的控制律輸出狀態平緩,系統收斂于期望值。由圖10可以看出,控制輸入曲線較為平滑,抖振較小,均在執行機構作業范圍內,其間出現的較小波動主要是由路徑切換造成的,滿足實際要求。
6 結 論
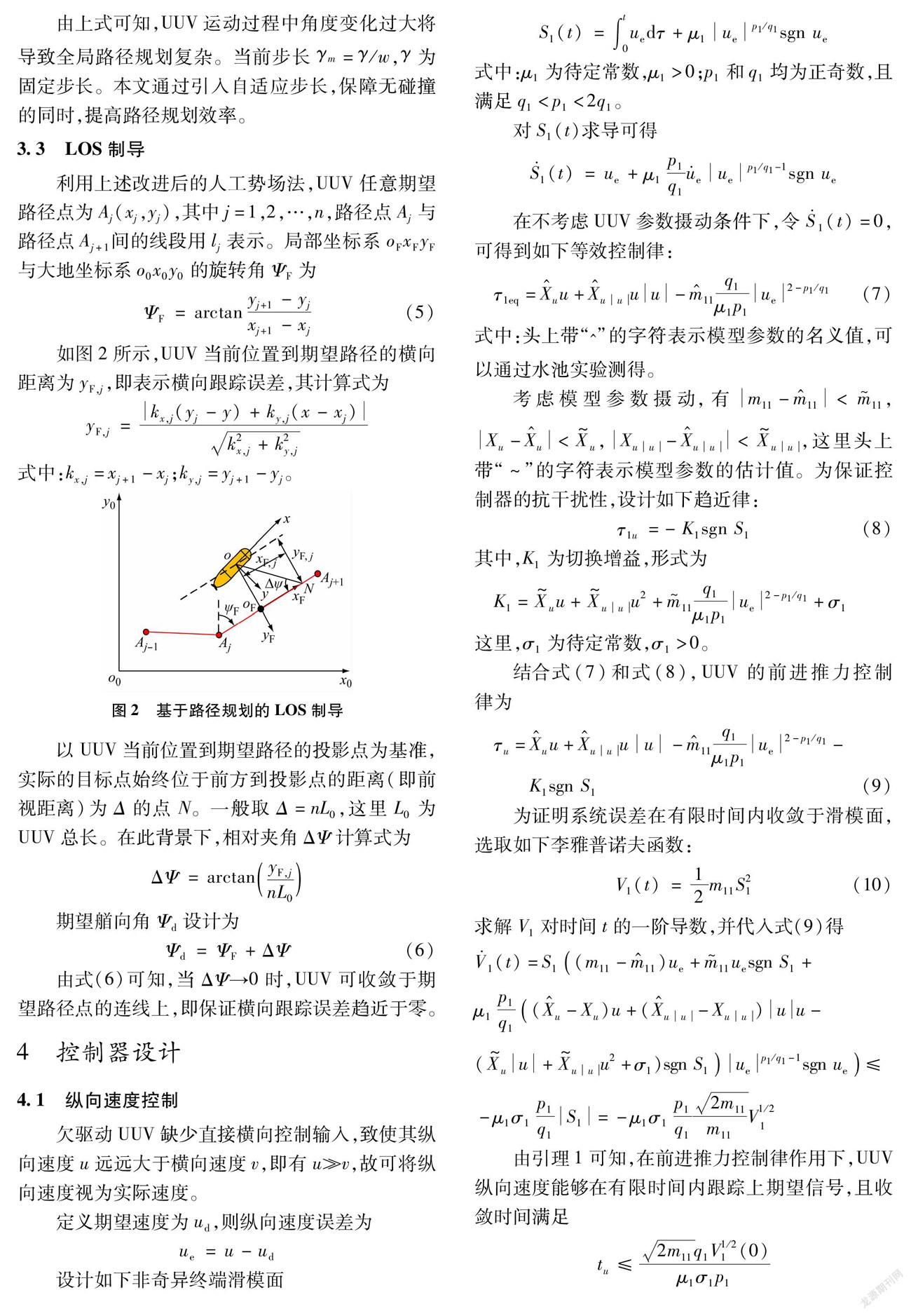
本文在無人水下航行器(UUV)路徑規劃的基礎上,研究UUV路徑跟蹤控制問題。設計一種自適應人工勢場法,減少多余的路徑點,為UUV實現路徑跟蹤奠定基礎。為使UUV精確跟蹤基于人工勢場法規劃出的路徑,引入Serret-Frenet坐標系,并設計基于路徑規劃的視線(LOS)制導方法。基于非奇異終端滑模控制設計UUV控制律,確保系統誤差可以在有限時間內趨近于零。最后基于李雅普諾夫穩定性理論證明所設計控制系統的穩定性,仿真實驗驗證了所設計的UUV路徑規劃及跟蹤控制方法的有效性。本文側重于路徑規劃與路徑跟蹤控制的銜接,路徑規劃及跟蹤控制的方法相對較為基礎,還需進一步改進。如何克服艏向角出現的跳變問題以及優化研究方法將是下一步的工作重點。
參考文獻:
[1]李碩, 劉健, 徐會希, 等. 我國深海自主水下機器人的研究現狀[J]. 中國科學: 信息科學, 2018, 48(9): 1152-1164. DOI: 10.1360/N112017-00264.
[2]鐘宏偉, 李國良, 宋林樺, 等. 國外大型無人水下航行器發展綜述[J]. 水下無人系統學報, 2018, 26(4): 273-282. DOI: 10.11993/j.issn.2.96-3920.2018.04.001.
[3]林政, 呂霞付. 基于改進模糊算法的水面無人艇自主避障[J]. 計算機應用, 2019, 39(9): 2523-2528. DOI: 10.11772/j.issn.1001-9081.2019020317.
[4]LIANG X, QU X R, WANG N, et al. Three-dimensional trajectory tracking of an underactuated AUV based on fuzzy dynamic surface control[J]. IET Intelligent Transport Systems, 2020, 14(5): 364-370. DOI: 10.1049/iet-its.2019.0347.
[5]YAO P, ZHAO S Q. Three-dimensional path planning for AUV based on interfered fluid dynamical system under ocean[J]. IEEE Access, 2018, 6: 42904-42916. DOI: 10.1109/ACCESS.2018.2861468.gzslib202204031033[6]LIANG X, QU X R, HOU Y H, et al. Distributed coordinated tracking control of multiple unmanned surface vehicles under complex marine environments[J]. Ocean Engineering, 2020, 205: 1-9. DOI: 10.1016/j.oceaneng.2020.107328.
[7]李沛倫, 楊啟. 基于改進人工勢場法的水下滑翔機路徑規劃[J]. 艦船科學技術, 2019, 41(7): 89-93. DOI: 10.3404/j.siin.1672-7649.2019.04.17.
[8]姚鵬, 解則曉. 基于修正導航向量場的AUV自主避障方法[J]. 自動化學報, 2020, 46(8): 1670-1680. DOI: 10.16383/j.aas.c180 219.
[9]YANG X, YANG W, ZHANG H J, et al. A new method for robot path planning based artificial potential field[C]//2016 IEEE 11th Conference on Industrial Electronics and Applications. IEEE, 2016: 1294-1299. DOI: 10.1109/ICIEA.2016.7603784.
[10]QU X R, LIANG X, HOU Y H, et al. Path-following control of unmanned surface vehicles with unknown dynamics and unmeasured velocities[J]. Journal of Marine Science and Technology, 2020, 26: 395-407. DOI: 10.1007/s00773-020-00744-3.
[11]LAPIERRE L, SOETANTO D. Nonlinear path-following control of an AUV[J]. Ocean Engineering, 2007, 34: 1734-1744. DOI: 10.1016/j.oceaneng.2006.10.019.
[12]LAPIERRE L, JOUVENCEL B. Robust nonlinear path-following control of an AUV[J]. IEEE Journal of Oceanic Engineering, 2008, 33(2): 89-102. DOI: 10.1109/JOE.2008.923554.
[13]周佳加, 嚴浙平, 賈鶴鳴, 等. 改進規則下自適應神經網絡的UUV水平面路徑跟隨控制[J]. 中南大學學報(自然科學版), 2014,
45(9): 3021-3028.
[14]邊信黔, 程相勤, 賈鶴鳴, 等. 基于迭代滑模增量反饋的欠驅動AUV地形跟蹤控制[J]. 控制與決策, 2011, 26(2): 289-292, 296. DOI: 10.13195/j.cd.2011.02.132.bianxq.024.
[15]霍宇彤, 郭晨, 于浩淼. 欠驅動AUV三維路徑跟蹤RBF神經網絡積分滑模控制[J]. 水下無人系統學報, 2020, 28(2): 131-138. DOI: 10.11993/j.issn.2096-3920.2020.02.003.
[16]高劍, 李勇強, 李璐瓊, 等. 基于航路點跟蹤的AUV回收控制[J]. 火力與指揮控制, 2013, 38(8): 103-106.
[17]王宏健, 陳子印, 邊信黔, 等. 欠驅動水下航行器三維直線航跡跟蹤控制[J]. 控制理論與應用, 2013, 30(4): 443-453. DOI: 10.7641/CTA.2013.20359.
[18]WANG N, SUN Z, JIAO Y H, et al. Surge-heading guidance based finite-time path-following of underactuated marine vehicles[J]. IEEE Transactions on Vehicular Technology, 2019, 68(9): 8523-8532. DOI: 10.1109/TVT.2019.2927893.
[19]WANG N, KARIMI H R, LI H Y, et al. Accurate trajectory tracking of disturbed surface vehicles: a finite-time control approach[J]. IEEE/AEME Transactions on Mechatronics, 2019, 24(3): 1064-1074. DOI: 10.1109/TMECH.2019.2906395.
[20]REPOULIAS F, PAPADOPOULOS E. Planar trajectory planning and tracking control design for underactuated AUVs[J]. Ocean Engineering, 2007, 34: 1650-1667. DOI: 10.1016/j.oceaneng.2006.11.007.
(編輯 賈裙平)
收稿日期: 2020-11-18
修回日期: 2021-06-25
基金項目: 國家自然科學基金(51879023);海洋防務技術創新基金(JJ-2020-701-02)
作者簡介:
滕建平(1994—),男,山東煙臺人,碩士研究生,研究方向為海上無人系統,(E-mail)tengjp@163.com;
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
領導決策信息(2018年50期)2018-02-22 06:17:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34