大型垂直升船機智能傳動控制體系關鍵技術及應用
2022-04-02 01:37:57桂遠乾曹陽唐勇
人民長江 2022年2期
關鍵詞:智能化
桂遠乾 曹陽 唐勇




摘要:大型垂直升船機是大江大河上水利水電樞紐的關鍵通航設施。
隨著三峽、亭子口、構皮灘等水利樞紐升船機的投入運行,新一代升船機傳動技術已發展到智能傳動控制階段。綜述了大型垂直升船機中應用的相關傳動控制技術:柔性制動的機電液一體化自感應控制技術、機械軸同步電機出力均衡和自動找點停車的多機構協同交互自適應控制系統、保持機構最佳運行狀態的基于人工神經網絡自學習技術、基于復雜系統協同運行流程規則的控制流程監控和系統安全自決策技術。實踐表明:采用該智能傳動控制體系,升船機成套設備運行可靠率超過了99.5%。相關經驗可供類似工程升船機系統設計借鑒。
關鍵詞:垂直升船機; 傳動控制; 智能化; 自適應; 人工神經網絡
中圖法分類號: TV736
文獻標志碼: A
DOI:10.16232/j.cnki.1001-4179.2022.02.018
0引 言
中國江河眾多,內河航運發達,在升船機建設方面,無論是數量和規模都居世界前列。其中丹江口150 t級(大壩加高后改造為300 t級)移動式鋼絲繩卷揚式垂直升船機和下水式鋼絲繩卷揚斜面升船機是中國最早投運的升船機[1],隔河巖第一、二級升船機是中國最早開始建設并首次招標的大中型全平衡鋼絲繩卷揚式垂直升船機[2-3],2016年建成投運的長江三峽水利樞紐齒輪齒條爬升式升船機是中國最早開始研究、當今世界上規模最大、技術最復雜的升船機,其他諸如彭水、亭子口、向家壩、構皮灘等升船機,也于近些年投入運行使用。
升船機的運行控制涉及機械、電氣、計算機、水利工程等多學科的融合,其控制工藝非常復雜。從最早的丹江口升船機,到三峽升船機,再到最近幾年投入運行的構皮灘升船機、亭子口升船機,其傳動控制水平也在不斷的提升[4]。新一代升船機傳動技術已形成以知識工程為核心,以自感應、自適應、自學習和自決策為顯著特征的智能傳動控制體系[5]。
大型垂直升船機智能傳動控制體系主要包括機電液一體化自感應控制技術、機械軸同步電機出力均衡和自動找點停車的多機構協同交互自適應控制系統、根據機構運行效果的評價自動改進控制算法的自學習技術、以多機構協同運行的流程規則實現控制流程監控和判斷的自決策等關鍵技術。
1機電液一體化自感應控制技術
升船機中許多機構運行采用液壓傳動和控制,最重要的有主提升機的液壓制動系統。垂直升船機主提升機和驅動機構安全制動系統是升船機運行控制與安全保證體系的重要環節。安全制動系統一般由安全制動器、工作制動器、液壓泵站、現地電氣控制單元、主拖動電機轉速檢測裝置、液壓泵站壓力檢測裝置以及連接升船機傳動協調控制站的網絡通訊模塊等組成,其中工作制動器和安全制動器是驅動系統的重要組成部分。
在正常工況下,安全制動系統與電氣傳動和控制系統配合,完成驅動系統的正常啟動和制動程序。當升船機運行過程中遇失電等事故工況時,電力拖動系統已不能進行正常制動,此時主機需由安全制動系統實施緊急停機制動[6]。傳統控制采用工作制動器或安全制動器分級或全壓上閘,制動力不可調,存在載荷沖擊。“柔性制動”技術采用速度閉環反饋控制[7],根據外載大小、方向無級調節制動力,可將船廂減速度控制在設計允許范圍,避免了載荷沖擊。
“柔性制動”的核心技術是建立了主提升機構的智能感應,對于傳感器檢測的信號,通過柔性制動的控制算法自動準確識別電機制動處于發電還是輕載電動工況,并根據不同的工況實施閉環控制。
柔性制動控制系統中,制動運算模型根據預先測得的電機負載力矩ML和減速器高速軸角加速度εg0,計算所需的發電工況或輕載電動工況制動力矩Mgb:
Mgb=ML+Iεg0(1)
式中:對于發電工況,ML為正值;對于輕載電動工況,ML為負值;I為驅動系統轉動零部件相對于電機軸的總等效轉動慣量的1/4。
電液比例閥輸出的液壓系統油壓計算公式為
pg1=NηS-MgbnημRbS(2)
式中:N為一套制動單元對制動盤施加的最大正壓力總和;η為考慮液壓管路沿程壓力損失的效率值;Rb為工作制動器制動圓半徑;S為制動器油缸有桿腔面積;μ為制動頭與制動盤接觸的摩擦系數;n為單臺工作制動器的制動單元數目。
在所施加的制動摩擦力矩作用下,驅動系統電機的實際轉速降低為
ωm1=ωm0-Δωm1(3)
式中:ωm0為緊急制動實施之前的電機測量轉速,Δωm1為第一次采樣時間間隔內電機測量轉速減少量。電機通過速度編碼器測量轉速,并傳送至安全制動器液壓控制泵站現地LCU的制動模型運算器,通過與給定理論轉速曲線的比較以及“閉環反饋PI調節控制律”,計算出電磁閥的輸出壓力和電壓的增量值,將該電壓增量值作為電液比例閥控制電壓的偏差給定輸入信號,實現安全制動器的速度偏差反饋控制。
“柔性制動”技術的特點是自動感應設備的狀態,將檢測信號經過特殊算法處理后,作為控制系統的輸入條件。自感應是自適應、自學習和自決策技術實現的基礎。
2多機構協同交互自適應控制系統
垂直升船機船廂驅動機構一般采用多單元多電動機分散驅動、機械軸剛性聯接的機械傳動方案,是一個多軸聯動的機械系統。該系統包括了龐大的機械軸系、各類齒輪傳動設備,以及船廂內所載的船舶與水體,因此被控對象是一個復雜的多變量、多子系統相互耦合的復合傳動系統。
為保證垂直升船機安全運行,電氣傳動與控制主要技術難點有:
(1) 流體負載下的船廂平衡。船廂內的水體對運行速度和行程變化比較敏感,速度和行程的突變會引起船廂水體波動甚至船廂失穩,進而使得每個驅動點上所受的力失衡,危及船廂內船舶安全。為了避免流體負載下的船廂失衡,要求主拖動系統的啟制動過程平緩、運行平穩。
(2) 多電機運行同步。同步軸的扭轉變形和機械傳動系統間隙對傳動存在影響,在船廂升降運行過程中會造成同步軸的扭振,破壞傳動系統的穩定。受同步軸的剛性系數、慣量和長度等因素的影響,每個驅動點的受力情況在動態時是不完全一樣的,同步軸變形及機械振蕩都可能引起系統的位置偏差。因此,主拖動系統需要進行位置同步控制、均衡多單元傳動裝置的出力(輸出轉矩、負荷)、抑制同步軸扭振,保持4個驅動點的同步運行。
(3) 自動找點動態對接停車。為了實現承船廂平穩運行和準確停位,要求提升機的電氣傳動系統能平滑無級調速和按5或3階段速度圖運行,并適應運行時上下游航道水位的快速變化,預測水位的變化率,尋找適當的減速點和準確的停機點,保證承船廂與航道對接時水位差在要求的范圍內。
垂直升船機主拖動方案采用了虛擬主驅動點的多變量約束、多閉環耦合的自適應控制方案。根據承船廂運行行程、速度、加速度、上下游目標位置、承船廂水深、當前承船廂位置等多項關鍵輸入信號,在冗余配置的傳動控制站中創建“速度同步”“位置跟隨”“力矩均衡”等智能閉環控制模塊構成的虛擬主驅動點模型,獲得虛擬主驅動點的速度給定、加速度給定、位置給定曲線以及力矩給定等最優控制目標,并能根據驅動機構的動態特性,調整結構參數,構建機械同步軸多電機自適應電氣傳動控制系統[8]。原理框圖見圖1。
“電氣行程同步”閉環控制策略的核心技術是獨立控制各驅動單元電機,在正常運行時同步軸不傳遞扭矩。該技術適應“工”形機械同軸聯動的機械系統(見圖2)[9],為使機械同步軸在正常運行工況中不承擔力矩負荷,需要控制多臺電動機在“工”形同步軸聯軸器間隙的微小區間進行“電氣行程同步”控制,使4個驅動點在任何時刻都處在同一個高程上(即在同一水平面上),實現承船廂平緩起制動和恒定速度水平狀態垂直升降運行。
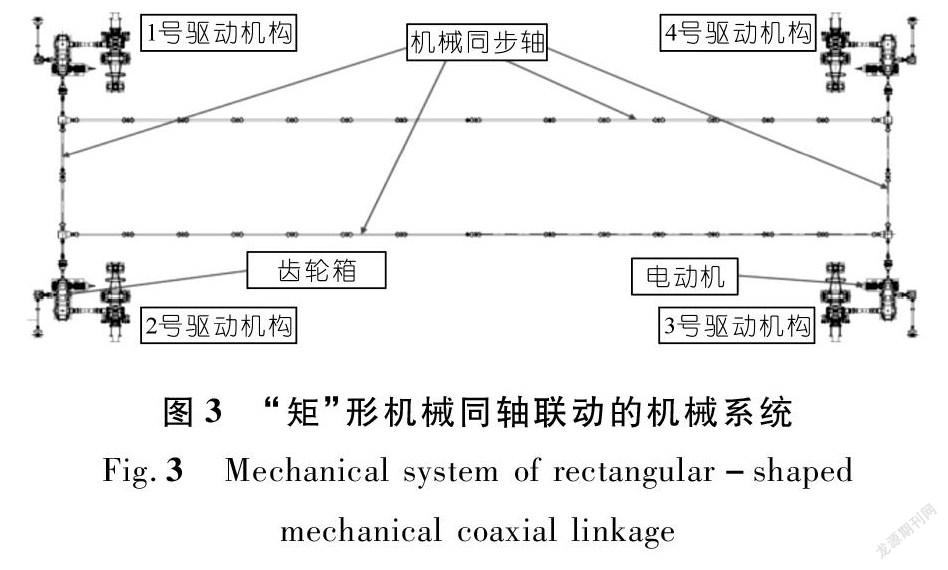
“電氣出力均衡”閉環控制策略的核心技術是控制所有電機的出力和速度一致。正常運行時允許同步軸上存在一定扭矩,該技術適應“矩”形機械同步軸聯動的機械系統(見圖3),“矩”形同步軸不僅能強制4個驅動小齒輪同步運行,還能夠在任意一臺電動機退出工作時保證驅動系統繼續運行至閘首對接位置。
升船機運行監控系統是一種采用多機協同交互控制技術的計算機監控系統。根據升船機各機械設備布置的特點和運行監控功能的需求,設置現地控制站。船廂傳動控制站完成對主提升系統的控制,閘首控制站和船廂控制站完成上下游水位檢測、船廂水深的檢測和調節、船廂門的安全操作、以及船舶安全進出船廂的監測。流程控制站協調各控制系統之間分工合作,分析各現地運行狀態和環境數據,進行通航過壩運行流程控制,運行過程中尋找適當的減速點和準確的停機點,實現停航流程控制、緊急保護流程控制、故障處理流程控制。
為實現升船機主驅動機構多電機同軸的行程、速度、力矩等同步,電氣傳動系統各驅動單元的電氣傳動裝置需進行協同控制[10],并根據機械同步軸的特性調整控制策略和參數,主動適應主驅動機構動特性的變化,使主驅動機構始終運行在最優狀態。
3基于人工神經網絡的自學習技術
承船廂是船舶過壩的載體,在船廂運動過程中,其電氣控制設備通過控制船廂門來保證船廂水深,實現船廂水域和上下游水域的連通,在升船機安全運行中發揮重要作用[11]。
承船廂與閘首密封對接的閘門采用雙缸液壓啟閉機控制。基于電液比例技術的閘門油缸同步控制系統充分利用電液比例技術控制精度高、頻響快的優點,在升船機閘門油缸液壓系統中加入比例閥及相關控制閥件,對通過比例閥的流量進行微調,實現油缸行程動態實時糾偏,滿足同步控制的要求[12]。
為保證閘門全行程過程中左右油缸行程偏差要求,通過對雙缸行程偏差趨勢的分析,進一步增加了閘門水封擠壓度、閘門運行噪聲級別和閘門運行振動級別這些關鍵數據的檢測和觀測,構建起全面和準確的閘門狀態感知。
通過引入雙缸偏差值變化趨勢的分析,對雙缸液壓啟閉機比例調節閥電氣控制參數進行調整。具體方法是:實時跟蹤左右兩個油缸活塞桿的行程之差,根據糾偏條件多次調整糾偏電壓比例放大系數,根據單位時間內油缸行程偏差差值變化的大小調整糾偏電壓值的大小,使得糾偏電壓與油缸行程偏差差值關聯,并根據糾偏效果的程度分級控制糾偏電壓值。該方法糾偏效果明顯,糾偏函數關系式易于PLC編程實現,使閘門運行平緩穩定,大幅減少停機頻率,從而保證了閘門可靠運行[13]。
將基于人工神經網絡的雙缸液壓閘門啟閉機油缸行程誤差補償方法應用于閘門調試運行過程中。利用儀器檢測或人工觀測的方式判定閘門在啟閉運行過程中的位置、振動和噪聲等閘門運行狀態的關鍵數據,并輸入到神經網絡誤差補償模型。該模型的輸出端為油缸行程補償值,將此誤差值疊加到實測油缸行程值中,生成新的油缸行程值。閘門電氣控制系統按照新生成的油缸行程值調節整定比例調節閥的電壓值,使左右油缸運行速率發生變化,兩缸行程差隨之變化,進而調整閘門在門槽中的狀態,以最佳軌跡運行[14]。
神經網絡與誤差補償流程見圖4。
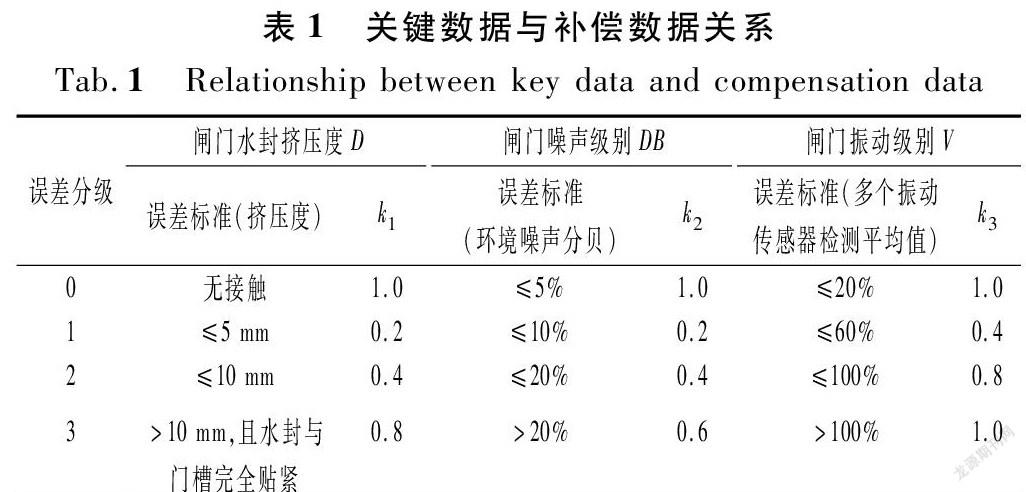
閘門運行狀態關鍵數據與油缸行程值的映射關系通過閘門水封擠壓度補償系數k1、噪聲補償系數k2、閘門振動補償系數k3體現:
h=k1k2k3ΔHC(4)
式中:k1、k2、k3的取值分別與閘門水封擠壓度D、閘門噪聲級別DB、閘門振動級別V的誤差分級標準一一對應,如表1所列,ΔHC為左右油缸行程偏差值。
建立初始BP人工神經網絡模型,將采集的關鍵數據輸入BP人工神經網絡模型,獲得油缸行程補償值h。將油缸行程補償值h輸出至閘門電氣同步糾偏控制系統,采集閘門狀態的關鍵數據。重復上述步驟,進行人工神經網絡訓練,獲得閘門運行最佳軌跡。
通過檢測和觀測單個閘門的運行狀態,評估控制策略和參數的正確性和優良度。經過網絡學習,形成單個閘門的控制參數和策略,并固定在程序中。控制系統自學習能力是在自適應基礎向人工智能邁進的關鍵一步。
4復雜系統運行安全自決策
升船機運行過程是嚴格的流程控制過程,各運行機構間有嚴謹的邏輯關系。按照事先的設計,升船機從某種初始狀態到結束狀態所實施的一系列動作過程包括:初始化流程、上行過壩運行流程、下行過壩運行流程、停航流程、緊急保護流程和故障處理流程等六大流程。
為確保船舶通過升船機時人、機、船的安全,在升船機的研究、設計、設備制造、軟件編制等各個階段,對升船機的設備與系統、部位與整體、關聯裝置與機構等之間的安全因數進行了分析、歸納、數據融合[15-16]、總結和故障推演[17]。按照潛在性故障對升船機運行影響的大小,
建立了升船機運行故障4級分類標準:
其中一級最高,四級最低。一級故障是可能導致升船機出現重大安全事故,必須進行承船廂驅動系統緊急制動,或者上下閘首臥倒小門和承船廂門緊急關閉的故障。
為杜絕一級故障的發生,除正常停機和快速停機的工況外,設計還采用了承船廂驅動系統緊急制動、其它機構緊急停機操作的“緊急停機”、緊急關閉升船機上下閘首工作門、臥倒小門及承船廂門操作的“緊急關門”運行工藝。
通過對升船機運行的速度、位置、機械受力、機構間隙等運行狀態的感知,系統提出并給定了運行速度超限、受力超限、間隙超限等故障的操作判定條件。
“緊急停機”命令發出后,要求系統的各控制站能同時執行“緊急停機”命令,對于由多現地控制站組成的升船機計算機監控系統,“緊急停機”命令采用“連環群發”方式發出。即:首先接收到“緊急停機”命令的控制站,在執行緊急停機的同時,自動生成一個緊急停機信號“E1”,并以廣播的方式發送到系統中的其他所有控制站,直至升船機完全停止。通過對操作運行人員的行為分析,在升船機多個部位設立“緊急關門”和“緊急停機”硬按鈕,當出現危及升船機運行安全狀況時,可立即停止升船機運行和應急關閉上下閘首臥倒小門及船廂門。
將升船機的運行流程、故障分析和故障判定條件編輯成專家知識庫。計算機監控系統專門設立了1 套獨立于運行控制系統之外的升船機安全系統,即以1臺安全可編程邏輯控制器(PLC)為核心,以分布式I/O為分支,設置傳感器獨立采集關鍵信號,感知升船機的運行狀態,通過固化在安全PLC的專家知識庫,對升船機的運行狀態進行監察、預警和故障判定。
流程監控安全網與運行控制網是分離的,通過計算機監控主機實現數據跨越,實現了控制系統與安全管理系統的有機融合。
升船機運行安全自決策系統的核心技術是將傳動控制設備的參數、機械機構的狀態、運行流程的邏輯和專家的風險評估有機結合,控制主機根據安全策略能自主決策,發出基于運行安全的控制命令。在工程實踐中,升船機運行安全決策系統將逐步實現人主機輔、人機協商、機主人輔等智能控制方式。
5應用效果
智能柔性制動技術不僅適用于全平衡齒輪齒條爬升式垂直升船機驅動系統,同時也適用于全平衡鋼絲繩卷揚式垂直升船機。三峽升船機船廂最大偏載水深緊急制動試驗完成了船廂正常水深、船廂偏載水深+4 cm、+8 cm、+12 cm、-6 cm、-10 cm上行和下行過程中,不同速度下的緊急制動試驗。緊急制動時相關試驗數據、液壓系統工作制動器制動油壓、驅動系統速度曲線及同步軸扭矩最大值均在設計允許范圍以內,制動一致性,制動加速度和滑移距離均滿足設計要求。
多機構協同交互自適應控制技術已在三峽升船機成功應用。自投入運行以來,8臺電動機均正常運行,4個驅動點間的最大行程偏差約為0.15 mm,任意2臺電動機退出運行時4個驅動點間的最大的行程偏差始終控制在規定的2 mm范圍內。
基于人工神經網絡自學習的閘門控制技術已獲得兩項發明專利[13-14],并在水利工程大型閘門控制和調試中予以應用。為升船機運行安全提出的流程控制和杜絕一級故障采用的緊急停機措施已納入GB 51177-2016《升船機設計規范》。
采用上述技術的大型齒輪齒條爬升式升船機,投運3 a內運行廂次14 970次,共計發生75次設備停機故障,成套設備運行可靠率為99.5%[18]。
6結 語
隨著智能傳動控制體系的建立,在升船機實際運行中將會產生海量的運行數據和報表。為進一步提高運行效率和挖掘通航潛能,運行管理單位可在原有控制平臺上進一步優化,從海量數據中清洗、篩選和挖掘出隱藏信息,保證升船機大型裝備的運行和健康狀態數據的準確度,通過機器學習和大量實際運行的訓練數據,進一步實現升船機狀態診斷和健康管理的智能運維,確保升船機安全高效運行。
參考文獻:
[1]袁達夫,邵建雄,朱雄,等.湖北水電機電及金屬結構[M].武漢:長江出版社,2015.
[2]曹陽,李瑩,唐勇.隔河巖升船機電力拖動及計算機監控系統設計[J].人民長江,2000,31(10):88-91.
[3]王婷婷,蘭欽.升船機運行監控系統的發展[J].艦船電子工程,2018,38(6):10-13.
[4]段波,張生權.垂直升船機電力拖動與控制設計研究[J].人民長江,2009,40(2):88-90.
[5]譚建榮,劉振宇,徐敬華.新一代人工智能引領下的智能產品與裝備[J].中國工程科學,2018,20(4):35-43.
[6]廖樂康,于慶奎,黃發濤.清江隔河巖升船機主提升安全制動系統設計[J].人民長江,2004,35(4):20-22.
[7]廖樂康,唐勇.升船機多液壓站柔性智能制動技術[J].人民長江,2020,51(8):151-157.
[8]秦雅嵐,唐勇.垂直升船機多軸多電機機械同步出力均衡控制技術的研究與應用[J].中國水運,2011,11(1):106-108.
[9]紐新強.大型齒輪齒條爬升式升船機[M].北京:科學出版社,2021.
[10]屈斌.三峽升船機電氣行程同步控制設計[J].人民長江,2016,47(23):69-75.
[11]雷念芳.垂直升船機船廂門控制過程實現[J].艦船電子工程,2006,26(3):94-96.
[12]宋遠卓,倪佳,付強.升船機主提升油缸同步控制系統研究及應用[J].華電技術,2014,36(7):10-15.
[13]曹陽,邵建雄,易先舉,等.雙缸液壓閘門啟閉機比例調節閥電氣控制參數的調整方法:201410781775.7[P].2016-03-30.
[14]曹陽,盧愛菊,邵建雄,等.基于人工神經網絡的雙缸液壓閘門啟閉機油缸行程誤差補償方法:201710058781.3[P].2018-10-16.
[15]石曉俊,王虎軍.升船機計算機監控系統中多傳感器數據融合方法研究[J].中國水運,2014,14(8):93-95.
[16]盛旭軍,胡永國,梅華峰.淺析升船機承船廂行程檢測方法[J].水利建設與管理,2009,29(9):57-58.
[17]段波,董博文.三峽升船機卷揚提升方案安全保障措施研究[J].紅水河,2002,21(4):61-63.
[18]金鋒.齒輪齒條爬升式升船機驅動系統運行可靠性分析[J].水運工程,2021(2):90-92.
(編輯:胡旭東)
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年13期)2021-07-28 07:14:34
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國儲運(2019年5期)2019-05-15 09:37:40
能源(2018年10期)2018-12-08 08:02:52
汽車觀察(2018年10期)2018-11-06 07:05:08
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國公路(2017年12期)2017-02-06 03:07:25