直升機磁流變座椅懸架緩沖系統模糊控制器設計
2022-04-02 05:08:12韓錦聿
重慶大學學報 2022年3期
劉 靜,浮 潔,韓錦聿
(重慶大學 光電技術教育部重點實驗室,重慶 400044)
直升機在發生事故迫降或墜毀時,飛行員或乘員的脊柱和骨盆會因地面傳遞到身體的沖擊總力而受到嚴重的傷害,甚至威脅生命安全[1-2],抑制沖擊載荷能夠減少駕駛員在墜機事故中脊柱骨折和截癱的風險,提高乘員的生存率[3]。座椅懸架是保護乘員安全的最后一道屏障,受到越來越多的關注。相比于傳統的減振、隔振等應用,直升機座椅懸架面臨沖擊速度高、時間短的挑戰。目前,最常見的座椅懸架緩沖器(耗能器)分為被動、半主動和主動形式。鋁蜂窩耗能器、金屬結構變形耗能器、機械式彈簧耗能器[4]等參數固定不能適應乘員質量、沖擊速度或沖擊能量的變化,緩沖性能有限[5]。主動緩沖著陸系統存在[6]驅動能量需求大、設計復雜等問題。基于磁流變材料的半主動耗能器通過改變輸入電流(或磁場)來實現阻尼力的自適應調節,具有響應快、功耗低等優點,在減振和緩沖應用中具有廣闊的發展前景及工程應用價值[7]。
對于材料和結構確定的磁流變耗能器,緩沖性能的優劣由控制算法決定,通過設計合適的控制算法找到最優的力 位移曲線,在實現沖擊能量吸收最大的同時避免阻尼力峰值過大對人體的傷害,實現保護人員和設備安全的目的。目前基于磁流變器件的半主動控制算法,主要針對振動或者低速沖擊問題[8],而對于直升機墜毀中的高速緩沖控制問題的研究尚少。如何實現“軟著陸”目標,即充分利用有效行程使承載著乘員的座椅系統安全著陸成為了控制策略設計的目標。有學者采用恒定阻尼力控制,以輸出人體能承受的最大載荷耗散沖擊能量,雖然可以保證人體承受的加速度低于傷害限,但不能充分利用磁流變耗能器的行程,無法有效地實現“軟著陸”[9]。有學者采用“軟著陸”控制策略并結合落錘的狀態進行反饋控制,仿真試驗驗證控制策略的可行性和有效性[10],但是該方法主要應對的不是直升機這種高速沖擊問題。還有學者研究了賓漢數(Bingham number,BN)控制[8,11-14],通過在沖擊初始階段設置BN 來實現軟著陸的目標,但是該方法存在可控范圍小,無法對高速沖擊進行有效抑制的問題。為了克服使用BN 控制時的不足,有學者將BN 控制擴展開發了最小持續時間減速暴露控制[15],該方法雖然拓寬了緩沖抑制的速度范圍,但是在低速下控制力過大,易引起人體的不適感。
模糊控制(fuzzy control,FC)是以模糊集合論、模糊語言和模糊邏輯推理為基礎的一種智能控制方法。通過語言規則將專家經驗知識融入到控制器設計中,可以描述任意的非線性關系,且不依賴于系統精確的數學模型、魯棒性強,具有巨大的應用潛力[16]。為此,文中基于單自由度座椅系統模型及其運動方程,提出了魯棒性強且不依賴數學模型的模糊控制方法,基于系統沖擊響應特性及磁流變耗能器的工作原理確定了模糊控制器的輸入反饋量,以“軟著陸”為目標設計了控制規則。最后基于數值仿真方法以人體極限載荷為標準評估了模糊控制下緩沖效果,并與恒定總力控制和恒定屈服應力2種控制方法進行了對比。
1 單自由度剛性乘員模型
單自由度剛性乘員模型是一個針對固定質量乘員建立的單自由度線性模型,如圖1所示,將人體和坐墊看成一個整體,由座墊承載的有效質量為M。基于牛頓動力學定律可知人體在緩沖過程中承受的加速度大小為

圖1 直升機座椅懸架單自由度模型Fig.1 Single-degree-of-freedom model of helicopter seat suspension

式中:Z¨0代表直升機座椅座墊的加速度響應;磁流變座椅懸架輸出的總力F D(t)由2個部分組成,分別為粘滯阻尼力和可控庫侖力FMR(t)(磁流變材料的屈服應力)。粘滯阻尼力與耗能器的活塞速度有關:

式中:c為耗能器阻尼系數;(t)分別代表座墊和機艙地板的速度。
假設乘員以及機艙地板從墜落到落地前都以相同的速度下降,即二者之間不具有相對運動,因此數值分析的初始條件為

考慮磁流變耗能器的可控范圍,文中所用磁流變耗能器阻尼系數取800 N·s/m,其行程為40.6 cm(16英寸)[11-13],與文獻[17]中的座椅參數設置相同。
2 模糊控制器的設計
2.1 控制目標
為了保證直升機實現“軟著陸”,本研究中設計的控制器的控制目標為:①充分利用磁流變耗能器有效行程(16英寸);②行程用完的同時系統速度降至0;③控制結束后系統加速度也降為0以避免速度波動,即控制目標滿足

式中,tf代表控制終止的時刻。
2.2 模糊控制器的設計
基于磁流變耗能器直升機座椅懸架單自由度模糊控制系統框圖如圖2所示。模糊控制器的第一個輸入反饋量選取的是坐墊與機艙地板之間的相對位移,另外一個輸入反饋量選取的是坐墊與機艙地板的相對速度,給模糊控制器實現平臺輸出提供反饋,經過模糊規則與模糊推理計算得到磁流變耗能器作用到座墊及人體的總力。
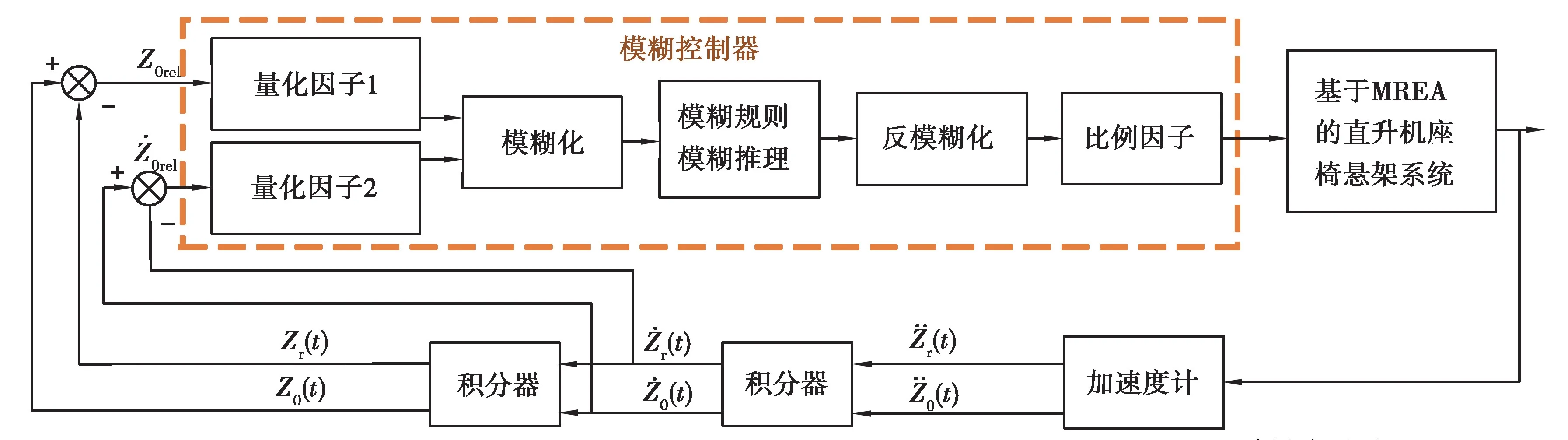
圖2 基于磁流變耗能器直升機座椅懸架單自由度模糊控制系統框圖Fig.2 Block diagram of single-degree-of-freedom fuzzy control system for helicopter seat suspension based on MREA
2.2.1 模糊化
根據模糊控制器“軟著陸”的控制目標及沖擊特點,模糊控制器的輸入反饋量分別選擇為負載與地面的相對位移和相對速度,經量化因子轉換到輸入論域[-C,C]內,坐墊與地板的相對速度和相對位移(即磁流變耗能器行程使用量)可以通過計算得到:


量化因子的取值為

式中:k1和k2分別對應負載與地面的相對位移和相對速度的量化因子;A1和A2分別為負載與地面的相對位移和相對速度的峰值;C1和C2為模糊控制器2個輸入量的論域范圍。
由于過多的語言變量將增加系統的復雜度和計算量,而較少的語言變量將使系統精度降低,故選取NB,NM,NS,ZO,PS,PM,PB 7個模糊語言變量對輸入隸屬度函數進行描述,其中NM,NS,ZO,PS,PM采用三角形隸屬度函數,NB和PB采用高斯型隸屬度函數。每個輸入變量的論域均被隸屬度函數劃分為具有重疊區域的相鄰間隔,既保證了控制過程中的靈敏度,又保證了控制過程中的穩定性。利用所設計的輸入隸屬度函數將負載與地面的相對位移和相對速度的輸入量精確值轉化為相應的模糊量Z和V,由于數值分析取Z軸向上為正,在沖擊過程中,座板與機艙地板的相對速度和相對位移均向下,即取值為負,因此其對應的論域設置為[-7,0],輸入隸屬度函數如圖3(a)和圖3(b)所示。
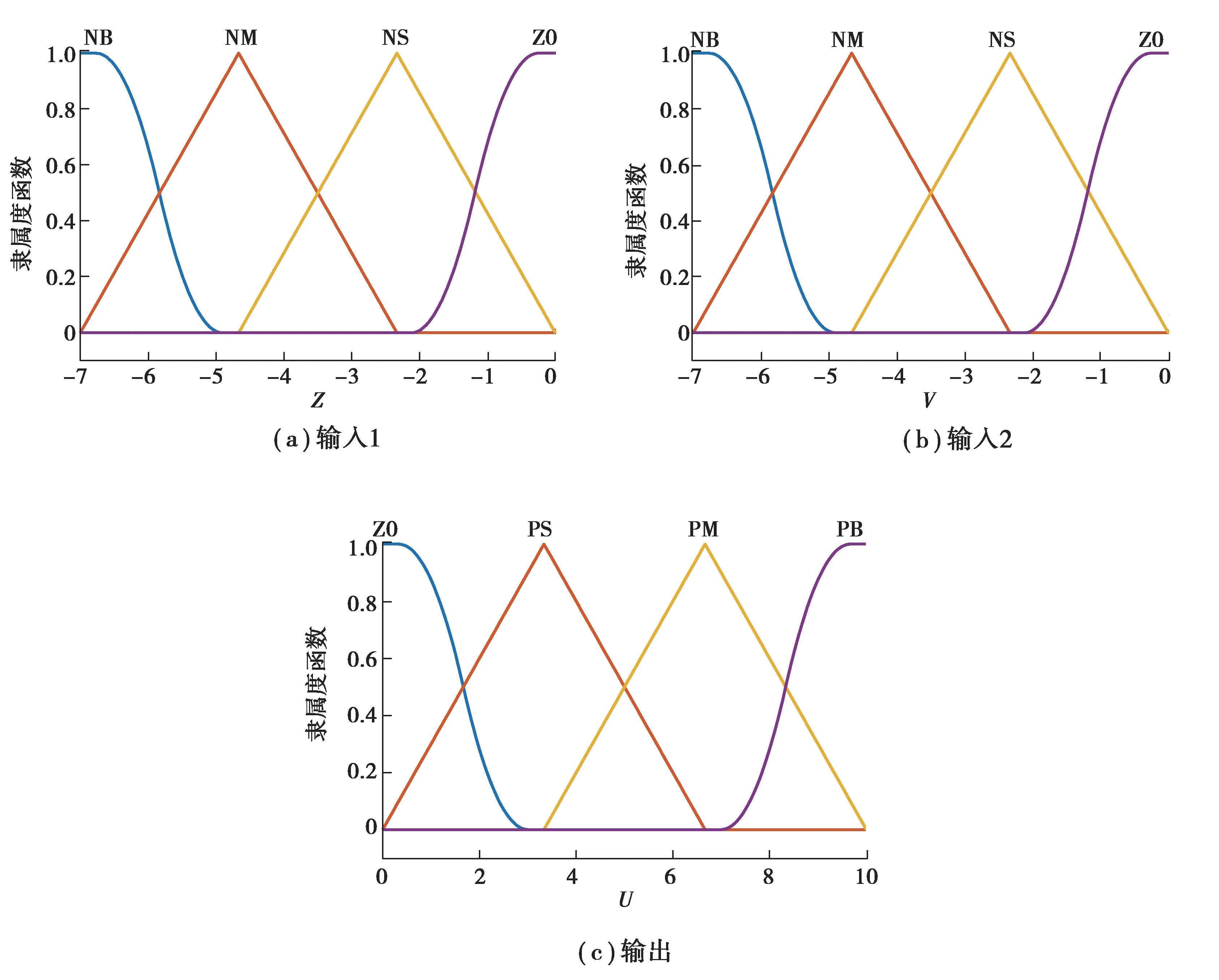
圖3 模糊控制器隸屬度函數Fig.3 Degree of membeship
2.2.2 模糊規則及模糊推理
基于方程(1)及磁流變耗能器的工作原理,所確定的模糊控制規則如表1所示,共包含25條模糊規則。模糊規則通常由一系列關系詞連接而成,為了實現耗能最大又要避免輸出的控制總力峰值太大超出人體傷害限制14.5 g[18],模糊規則設計思想是實現“平臺效應”,由于控制總力中的分量粘滯阻尼力與速度成正比,在相對速度峰值處模糊控制器輸出的力就應該小,可表述為:
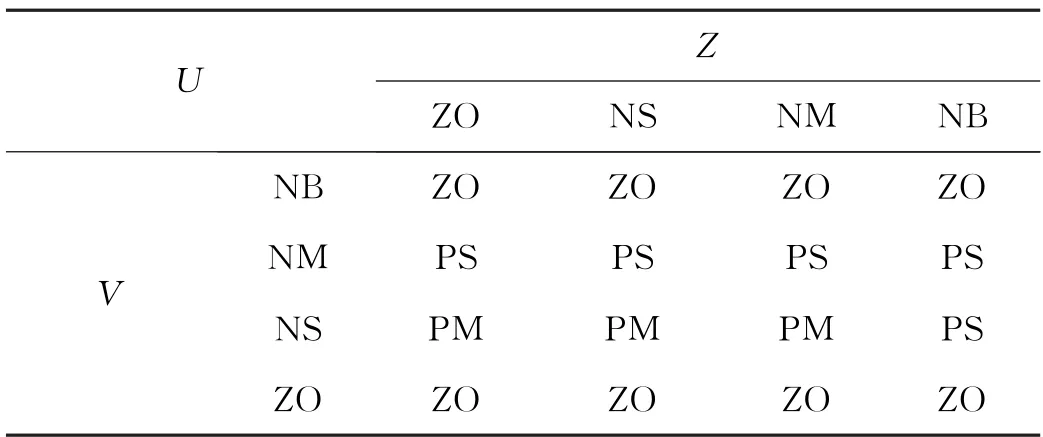
表1 模糊規則的設計Table 1 Design of fuzzy rules
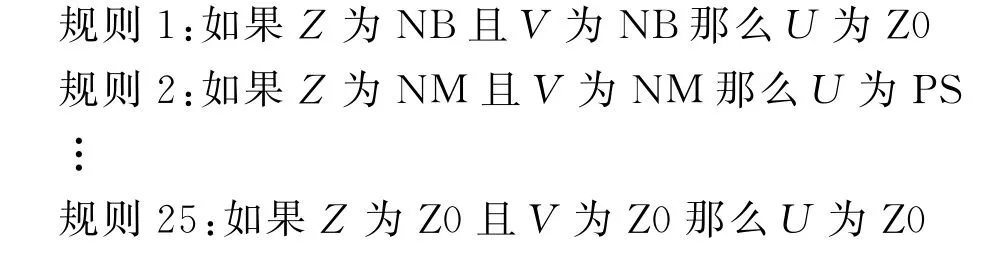
式中,U為控制器的輸出值所對應的模糊子集。文中采用Mamdani推理算法,根據輸入模糊量,通過模糊規則和模糊推理得到模糊控制量。
2.2.3 反模糊化
通過模糊推導所得到的控制量是模糊量,為了實現實際控制,需利用輸出隸屬度函數將輸出值的模糊量U轉化為相應的精確值u,其輸出隸屬度函數如圖3(c)所示,文中所采用的反模糊化方法為常用的重心法。精確值u經比例因子k3進行縮放,即為直升機座椅懸架所輸出的可控庫侖力FMR(t)為
FMR(t)=u·k3。
以上根據直升機沖擊特點及磁流變耗能器的工作原理,設計了模糊控制器的結構與控制規則,為了進一步分析模糊控制器的緩沖控制效果,此外還設計了2種線性控制器——恒定總力控制和恒定屈服應力控制,并采用數值仿真分析方法進行了對比分析。
2.3 恒定總力控制器
恒定總力控制器輸出一個恒定的控制總力,其由兩部分力組成:粘滯阻尼力和可控庫侖力。根據上述的控制目標進行恒定總力控制器(total force constant controller,TFCC)設計,一定存在一個恒定總力FD(TFCC)可用盡懸架有效行程時完全吸收對應確定沖擊速度下的沖擊能量:

根據式(8)可得到對應不同速度下所需要的恒定載荷大小,據此設計一個總力恒定控制器,那么就可以計算出對應的可控庫侖力為

2.4 恒定屈服力控制器
恒定屈服應力控制是指在恒定電流下磁流變材料輸出一個恒定屈服應力。根據這個思想設計了恒定屈服應力控制器(yield stress constant controller,YSCC)。其控制目標與TFCC的控制目標一致,該控制器對應不同的沖擊速度輸出一個恒定的屈服應力FMR(YSCC),再加上粘滯阻尼力即為懸架系統輸出控制總力,根據能量守恒定律可得

結合式(8)和式(10)可知對應不同下沉速率下的FMR(YSCC)大小。
3 控制仿真對比與分析
為了驗證所設計的控制器的緩沖效果,基于式(1)中沖擊模型,選擇質量為70.4 kg的第50%男性乘員[19]在6~12 m/s不同沖擊速度下進行模糊控制器作用下的Matlab/Simulink控制仿真。最后分別與恒定總力控制、恒定屈服應力控制下的緩沖效果進行對比,依據標準傷害指標評估3種控制器的控制效果。
3.1 仿真結果
圖4~圖6給出了6、9、12 m/s沖擊速度下3種控制器對應的輸出總力F D(t)響應曲線、相對速度響應曲線、沖擊位移z0rel(t))響應曲線、磁流變耗能器輸出的力 位移曲線。
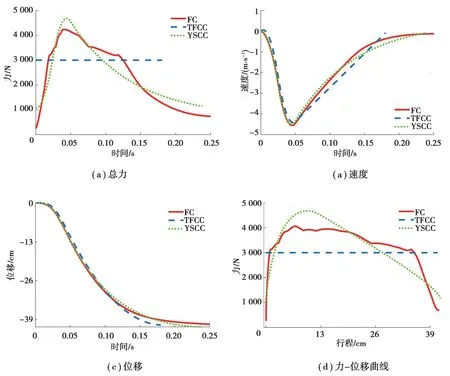
圖4 6 m/s下3種控制器的仿真結果Fig.4 The simulation results of three different controllers at 6 m/s
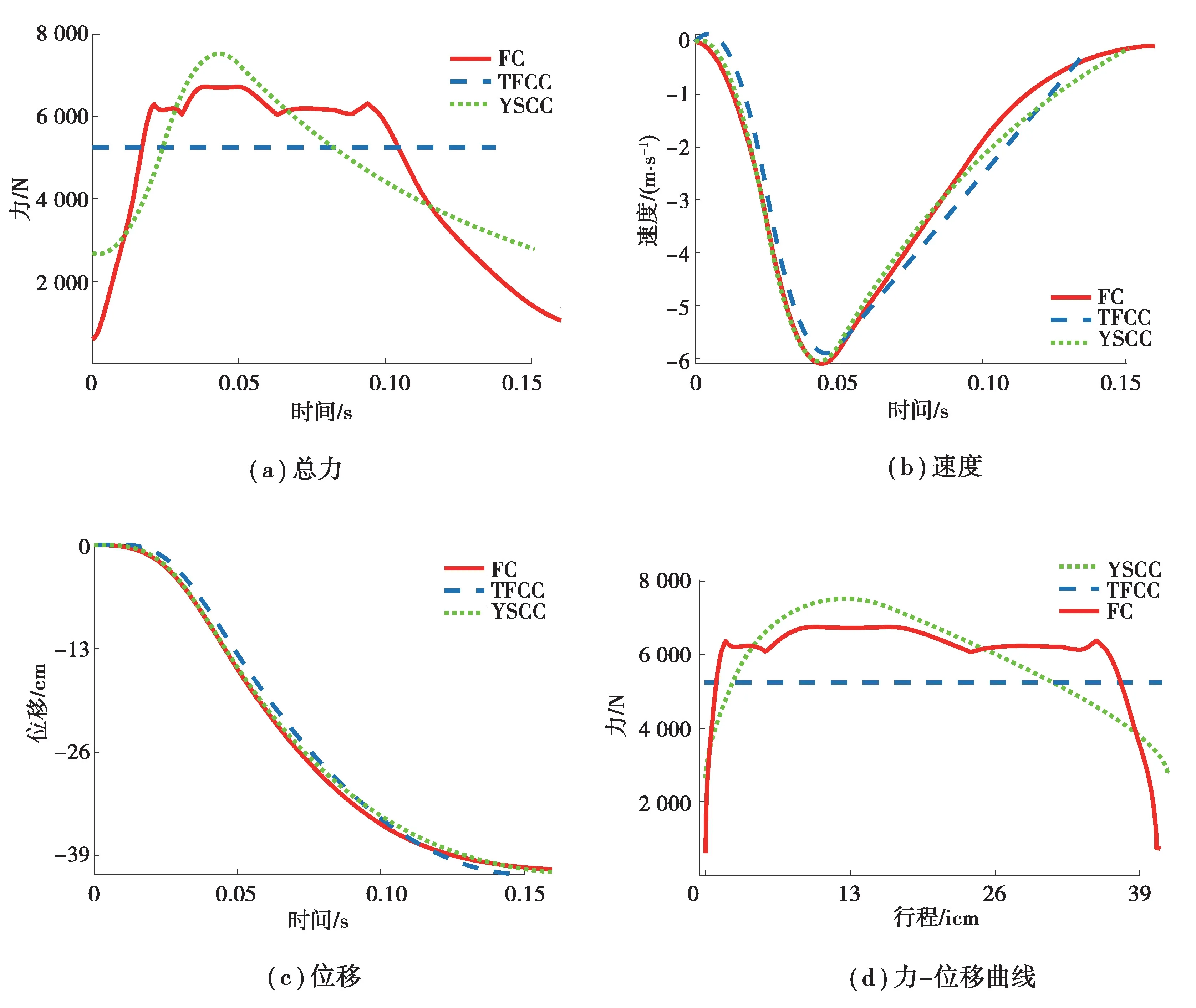
圖5 9 m/s下3種控制器的仿真結果Fig.5 The simulation results of three different controllers at 9 m/s
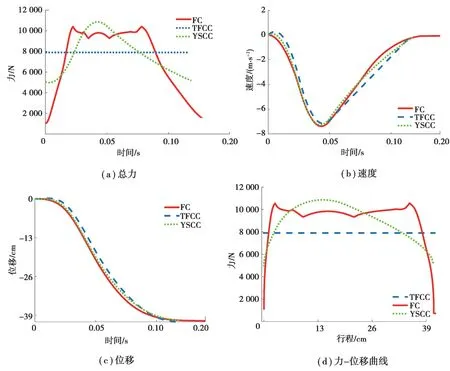
圖6 12 m/s下3種控制器的仿真結果Fig.6 The simulation results of three different controllers at 12 m/s
隨著沖擊速度的增大,3種控制方法輸出的控制總力峰值也增大,其人體相應加速度峰值也增大,此外在行程充分用完的同時系統速度均降為0,從控制總力 位移曲線圖可以看出,TFCC 輸出的控制力峰值最小,其次是FC,最大的是YSCC。分析不同方法對應不同速度下的控制過程可以發現:
1)TFCC控制全程輸出的是恒定的總力,在不同沖擊速度下坐墊的加速度響應遠小于傷害限14.5g。但是在行程充分用完且系統速度降為0時,系統沒有一個動態調整的過程,導致加速度在控制結束時不為0,因此有二次反彈的危險,可能對人造成不適甚至二次傷害,無法實現“軟著陸”目標。
2)YSCC最大加速度值14.4g出現在12 m/s的沖擊條件下,接近傷害限14.5g。但存在一個和TFCC一樣的問題:在控制結束時系統加速度不為0,因此有速度發生波動,也無法實現“軟著陸”目標。
3)FC擬合出的控制力 位移曲線分3個階段:上升期、平臺期、下降期。上升期可以迅速地將控制力提升,平臺期可較好的維持一個大小穩定的控制力,避免了出現尖峰導致身體承受加大的加速度,下降期的調整過程可以將加速度也降至0左右,避免了系統速度由于加速度波動而反彈的現象,可實現“軟著陸”的控制目標。
4)對于單自由度緩沖系統模型來說,由于傳遞到人體的加速度與控制總力峰值成正比,因此TFCC 控制作用下傳遞到人體的加速度最小。但是從控制方法的可實現性來說,以上2種恒定線性控制器過于理想化,實際中難以實現,因此僅作為模糊控制器的設計參照。
3.2 對比與分析
動態極限總力是根據乘員在撞擊過程中可以承受的最大垂直允許總力(即耗能器的總沖程力和座椅懸架中的粘滯阻尼力)確定的。文中選擇了14.5g的極限系數來評估第50%男性乘員受傷程度。換句話說,耗能器的總力峰值為不超過座墊及其承載的人體有效質量總和的14.5倍。
從圖7可以看出3種控制器幾乎都用盡了有效沖程,在這個基礎上,比較在不同速度下分別利用3種控制器后人體相應的加速度峰值,對3種控制方法進行對比評價。

圖7 3種控制器的位移Fig.7 Displacement of three different controllers
從圖8中3種控制器對應不同速度下人體的加速度響應對比可以知道,TFCC 輸出恒定總力大大降低了輸出控制總力峰值,能將傷害降到最低,其次控制效果較好的是FC,YSCC輸出的恒定屈服應力疊加了粘滯阻尼力,加速度峰值出現在相對位移的峰值處,相比另外2個控制器,其生物響應最大,但是三者在6~12 m/s的沖擊速度下,均未超出14.5g。
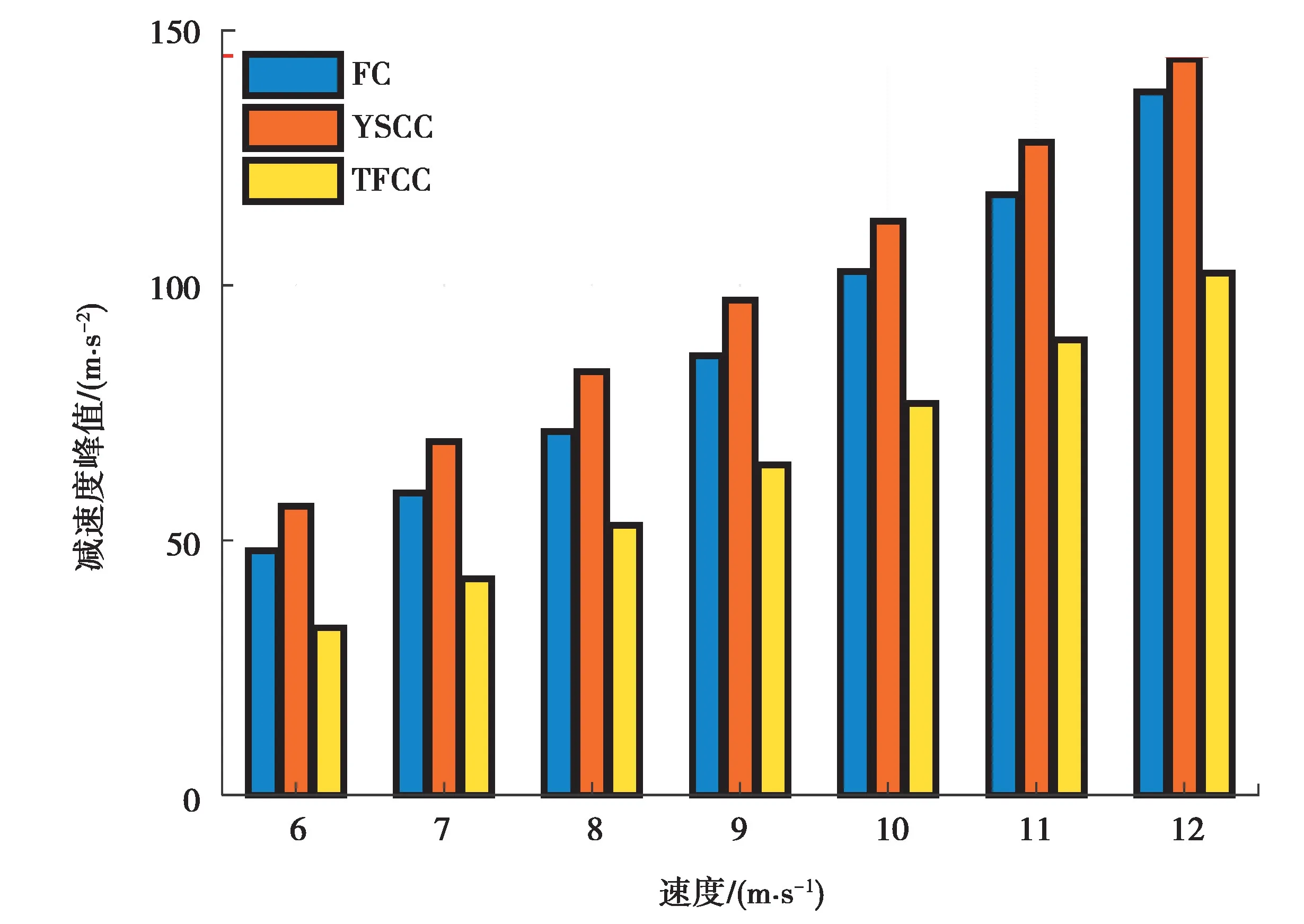
圖8 6~12 m/s沖擊速度下3種控制器對應的人體減速度峰值Fig.8 Peak deceleration of three different controllers under 6~12 m/s
從圖9給出的對應不同速度下3種控制器在控制終止時系統加速度的大小的對比圖可以看出:在行程終點處,TFCC和YSCC還保持著一個較大的力,系統加速度不為0,此外以上2種控制器均為理想控制器,實際應用中難以實現。FC擬合的力 位移曲線可“達到平臺效應”,且能真正實現“軟著陸”,有效避免行程末端系統加速度不為0帶來的反彈傷害。對比來看,FC更適用于直升機座椅懸架緩沖控制中。
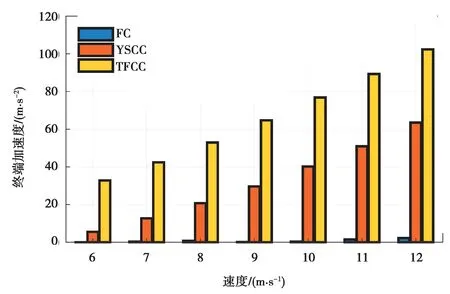
圖9 6~12 m/s沖擊速度下3種控制器對應的系統終端加速度值Fig.9 Terminal acceleration of three control methods under 6~12 m/s
4 結論
針對直升機迫降或墜毀時地面對座椅的沖擊問題,以“軟著陸”為控制目標,分析了應用磁流變耗能器直升機單自由度座椅懸架緩沖系統的緩沖原理及運動方程,并基于分析的理想控制力 位移輸出曲線,提出模糊控制的設計方案,最后以人體加速度峰值為評價指標,分別與TFCC、YSCC 2種控制方法的控制效果和可實現性做了對比。得出以下結論:
1)從控制效果上分析,盡管在沖擊速度6~12 m/s的范圍內3種控制器都能將人體加速度控制在傷害限以內,并且3種控制器在沖程結束時乘員速度都能減小至0,但是TFCC和YSCC在不同初始沖擊速度下無法及時將系統加速度降為0,速度仍有波動,無法同模糊控制器一樣實現“軟著陸”。
2)從可實現性上比較,TFCC、YSCC以過于理想化的恒力為目標,不宜實現,實際緩沖系統中存在很多非線性因素,簡易線性控制器在實際應用中效果往往不佳。
相比之下,模糊控制器可以實現“平臺效應”,控制下降期可以將系統加速度降低至0,進而實現“軟著陸”,因此模糊控制在不同初始沖擊速度下都有更優的綜合控制效果。