無人機三維激光掃描在地表沉降的監測研究
2022-04-06 02:10:34李彬彬秦海超
北京測繪 2022年3期
李彬彬 王 笑 秦海超
(1. 雄安城市規劃設計研究院有限公司,河北 保定071700;2. 建設綜合勘察研究設計院有限公司,北京 100007)
0 引言
由于受礦產開發、地下水過度消耗以及其他人為或自然因素變化等多種原因影響,近年來地表沉降甚至塌陷現象頻發[1]。據統計,僅2019年,我國就發生地面塌陷事件121起,2020年增加到183起,造成了嚴重的財產損失,并危險到人民生命安全。由此可見,地表沉降監測已成為當前社會生活中的一項重要任務,且這項任務的工作量在逐年增大,精度要求也越來越高[2]。
當前,可用于地表沉降監測的技術手段有很多,而三維激光掃描是近年來在該領域逐步成熟的一項新技術,其測試精度較高且操作簡便。與此同時,隨著無人機技術的發展,將無人機作為掃描儀器的搭載平臺,能夠大幅提升監測的范圍和效率[3]。基于無人機的三維激光掃描技術,與傳統的機載(有人駕駛飛機)、車載和手持系統相比具有獨特的優勢:一是其監測范圍較大,且飛行路線不受地形限制,可實現對目標區域的全覆蓋監測;二是無人機受客觀環境因素的影響很小,能夠在高危險和高污染區域使用;三是隨著無人機技術的不斷發展,其應用成本越來越低廉,已經具備大范圍普及使用的條件。基于此,本次研究采用無人機三維激光掃描技術對地表沉降情況進行監測,通過掃描得到的數據和資料,對地表不同時期的形態進行三維表面建模,并通過模型配比,提取地面沉降的特征和數據信息[4],從而有效掌握地表變化情況,并為下步針對性治理以及安全措施制定提供可靠的數據支持[5]。
綜上而言,基于無人機的三維激光掃描技術,具有測量精確度高、獲取數據全面且速度快等優勢,這在地表沉降監測工作量越來越大的當前,無疑是提供了一種高效率、低成本、易普及的監測方式,具有一定的工程借鑒意義。
1 基本原理及流程
將無人機作為三維激光掃描的應用平臺,有效融合了無人機遙感與三維激光掃描兩項技術,其可以對目標區域進行全方位掃描。通過機載三維激光掃描儀的高精度慣性制導系統,可以實時獲取無人機的飛行軌跡以及飛行姿態等參數,且在無GPS信號時,該系統可通過激光測距系統實現主動避障,本次研究所使用的無人機及機載設備的主要參數如表1所示。

表1 本次研究所使用的無人機及機載設備主要參數
一般來說,使用無人機三維激光系統進行掃描前,需要先進行實地踏勘,收集目標區域的高程、區域面積等基礎資料,并規劃飛行路線、飛行高度,根據任務需要設定掃描分辨率。為保證建模質量,應當確保足夠的覆蓋范圍和重疊度,以確保對目標區域進行全方位無死角的覆蓋監測。之后通過機載激光掃描系統,以一定的分別率對目標區域進行全面掃描,目前常用的測距方式是脈沖測距法,該方法是通過激光器發射激光脈沖,脈沖遇到障礙物后反射,通過測量時間和發射角度即可計算出目標的位置及距離,以此得到目標點位的三維空間坐標。通過掃描得到的數據和資料,可以獲取目標區域的表面密集點的三維坐標數據,即點云數據,從而達到整體測量的目的。總體而言,基于無人機的三維激光掃描方法為非接觸測量,可測量面積大,數據采樣率和采集精度較高,采集過程為全數字化采集,約束條件較少。基于無人機的三維激光掃描流程如圖1所示。
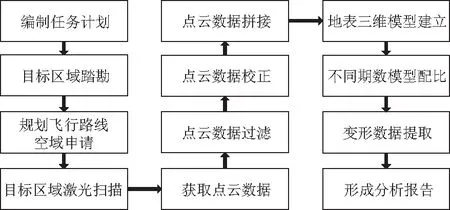
圖1 無人機三維激光掃描的基本流程
2 數據處理
采用無人機三維激光掃描技術的主要目的是為了快速且準確地獲取目標區域的三維坐標數據,而數據的處理過程將直接影響到后期建模效果以及綜合分析的準確性[6],本次研究采用小波神經網絡方法對數據進行優化處理。
2.1 點云數據處理
獲取點云數據后,需要進行拼接、濾波、抽稀及分割等操作[6]。由于三維模型的構建需要將所有點云數據都被整理到同一坐標系下,因此首先進行點云數據拼接,這需要對每個掃描單元設置標靶,并且要滿足相鄰兩個單元的重疊區域至少有3個以上標靶的條件,這樣就可以通過標靶的強制疊合,使相鄰掃描單元的點云數據被統一到同一坐標下。在這個過程中,一般需要求解出以下三個參數[7]:尺度參數、平移及旋轉參數,通常采用七參數配準以及迭代最近點等算法。之后進行濾波,在三維掃描過程中,難免會出現噪聲,這可能導致在建模過程中出現誤差[8]。這些噪聲一般是由儀器本身誤差、測量對象以及天氣等其他偶發因素造成的,在建模前進行去噪處理十分必要,對應處理方法如下:對于儀器誤差產生的噪聲,需要提前調試設備,設置合理的參數,并采取平滑或濾波的方式進行處理;對于測量對象自身因素產生的噪聲,一般通過調整掃描距離或調整分辨率方法進行處理;對于天氣、動物等其他偶發因素造成的噪聲,必須通過人工處理方式進行剔除,可以采用中值濾波、平均濾波或標準高斯法濾波等方法進行處理。最后進行數據抽稀及分割,點云數據的拼接必然會產生數據的重疊和冗余,這會導致后續數據處理工作量增大[9],可以優選保留必要的數據點而剔除多余的數據點,可采用最小預知法、均勻網絡法等方法進行冗余數據簡化,使得在滿足測量精度要求的前提下,盡可能減少數據運算量進而提高建模效率;數據分割的目的是將具有相同屬性的數據點劃分到同一個區域內,劃分的標準是根據幾何或拓撲關系的屬性而定,將數據進行合理地分割,能夠有效提升建模的準確度和效率性。
2.2 小波神經網絡方法
小波神經網絡的基本原理是使用小波元替代神經元,它可以通過仿射變換,從而使網絡系數與小波變換相結合。小波變換提供了一個時間與頻率接口,它將信號拆解為一系列小波函數,最后將其疊加。其中ψ(t)是一個基本小波函數,它的傅里葉變換公式為
(1)

之后將任一基本小波函數進行位移變換(設為n),并在不同的尺度h下與需要分析的信號x(t)進行內積,其計算公式為
(2)
式中,h是伸縮因子;τ是時刻值;n是平移因子;x(t)是待分解的信號。
本文研究采用多貝西(Daubechies)小波函數,該函數已被證明在模擬復雜的非線性函數時,其在收斂速度、擬合精度以及容錯能力等方面功能強大,這對于地面沉降情況的模擬分析來說,具有很強的適用性。
小波神經網絡在復雜非線性函數的模擬方面,已被證明要優于反向傳播(back propagation, BP)神經網絡,設:輸入和輸出向量分別為xk和yi;隱含層到輸出層的權值和輸入層到隱含層的權值分別是wij和wjk;隱含層的伸縮和平移參數分別是pj和qj;輸出向量yi的對應輸出為dj;隱含層和輸出層的神經元個數分別為a、b、N;E為誤差函數,其學習過程為
在小波神經網絡訓練開始之前,隨機確定閾值和權值,然后進行誤差的計算及逆向反饋,經過反復訓練直到滿足設定條件為止。
3 地面模型建立及精度分析
3.1 模型建立
實驗區域位于遼寧省某市廢棄礦場地表,該區域由于多年的礦產開采,地下已探明的采空區多達18處。本次研究,選取了其中沉降位移較為嚴重的一片區域,區域代號SDT-12,根據以往礦場開發數據,該處地下采空區體積約為12×104m3。研究中采取無人機三維激光掃描與傳統架站式三維激光掃描兩種方式進行比對,同時為驗證模型的有效性,設立了6個水準測量點位與模型數據進行對比。兩種監測方法的掃描結果如圖2所示。可以看到,對于傳統架站式三維激光掃描技術而言,在該區域的東北角及東南角由于地勢原因無法有效布設測試設備,因此造成了點云缺失或稀疏。
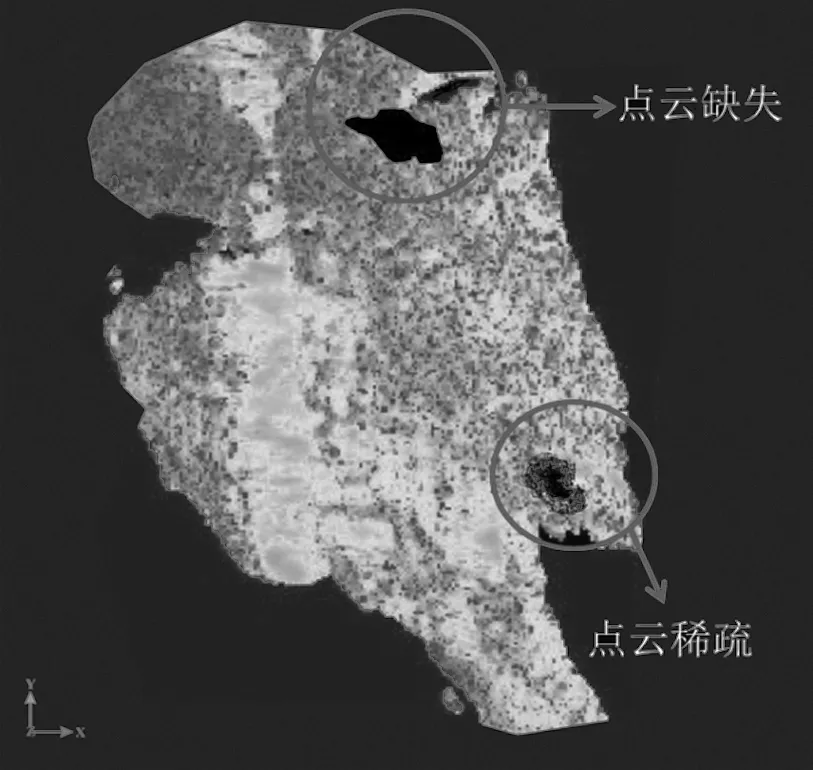
(a)架站式設備獲取點云數據
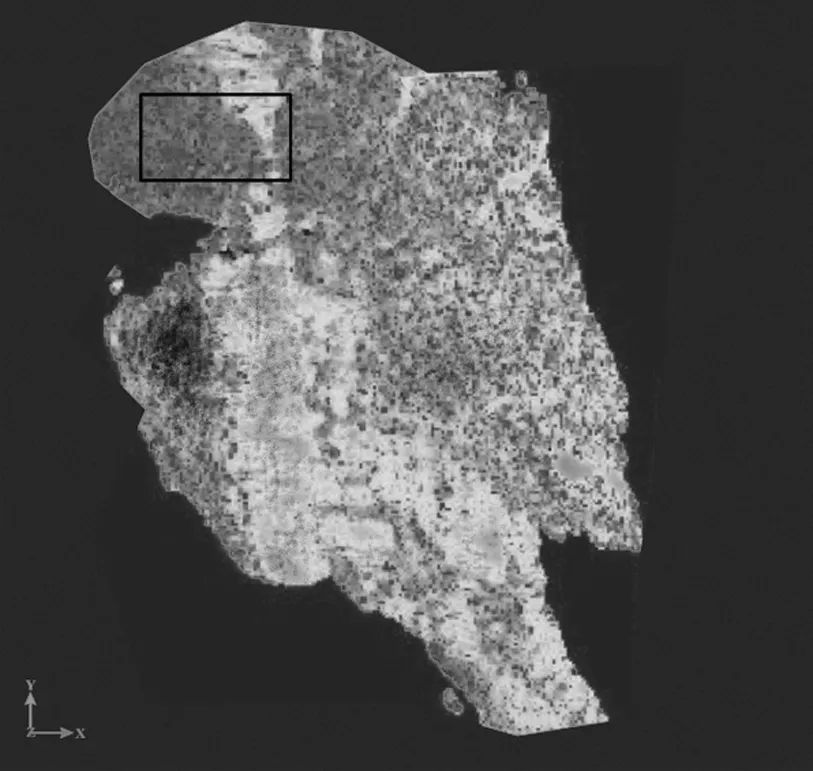
(b)無人機三維激光掃描獲取點云數據
本文中,選取該區域西北方向一矩形地域建立三維模型并進行沉降數據提取,即如圖2(b)中西北角方框中的區域,模型建立過程中的小波神經網絡訓練參數設置如表2所示。

表2 小波神經網絡訓練參數設置
分別建立Ⅰ期模型(數據于2020年9月獲取)和Ⅱ期模型(數據于2021年8月獲取),如圖3所示。為便于對比,圖中z坐標是海拔高度,x坐標和y坐標是以截取的矩形形狀的一角為原點構建。可以看出,三維表面模型較為直觀地反映地表的基本形態,同時可以直接對模型中的點位進行三維坐標提取。
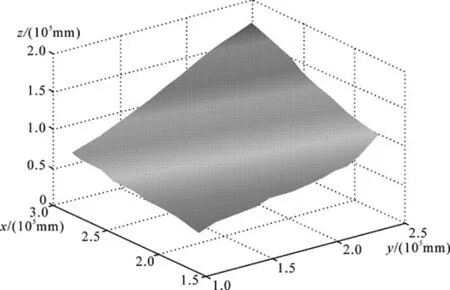
(a)Ⅰ期模型

(b)Ⅱ期模型
3.2 沉降情況分析
將Ⅰ期和Ⅱ期模型放入同一個坐標系中,可對兩期地表形態進行對比,并計算出兩期數據的高程的差值,即得出沉降值Δh,從而能夠直觀地對變形情況進行觀察及分析。兩期地表形態的沉降模型如圖4所示。

圖4 地表下沉情況模型圖
通過對比及數據提取,可以發現該區域的沉降趨勢明顯,沉降位置主要位于該區域的東北角,最大沉降量達到1 372 mm;而該區域東南角略有抬升,最大上升位移161 mm。通過計算得出,該區域平均沉降量為673 mm。按照地質災害災變等級劃分[10],該處地表沉降規模屬于中型沉降,危險性方面屬于中等危險型。
3.3 精度分析
對于小波神經網絡點云數據曲面擬合的精度,通過對兩期模型的60個測試點位的模擬值和真實值進行對比計算,均方根誤差控制在5.37~6.14 mm的較低區間,最大相對誤差均小于0.02%,具體情況如表3所示。為驗證建模精度,此次實驗還設置了6個水準對比點,均為Ⅲ級臨時性水準點,且這6個點全部為不參與建模的精度對比點,受地形限制基本按照2×3的模式進行布點,其中4個點位于交叉道(路)口,2個點位于臨時建筑物旁側。將提取的點云高程數據與6個水準測量數據進行對比,兩期監測數據與水準數據的誤差控制在7 mm以內,如表4所示。可以看出,該方法較為準確地反映了地表的變化情況,監測模型是可靠的。
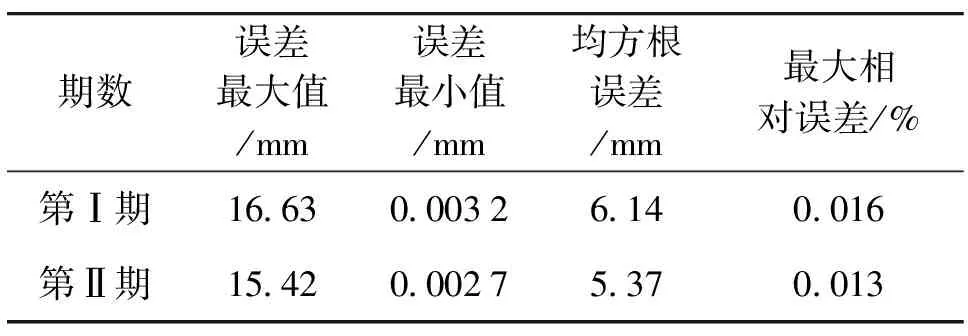
表3 曲面擬合精度

表4 點云測試數據與水準測量數據對比 單位:mm
4 結束語
基于無人機的三維激光掃描技術,能夠對目標區域進行全面、高效且精確的掃描,與傳統監測方式相比較,其監測速度更快、獲取的數據也更完整;再者,對于存在地表沉降情況的危險區域而言,該技術無須測試人員進入危險區域布設設備,在安全性上也要優于傳統監測手段。總的來說,該方法測量誤差控制在合理范圍以內,具有較強的實用性和可靠性,提供了一種精確且有效的監測手段,對于高效便捷地開展地表沉降監測工作具有一定的現實意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
