地鐵移動測量系統時間基準傳感器性能測試技術研究
2022-04-06 06:16:58鄒祿杰花向紅巢佰崇趙不釩李琪琪
測繪工程 2022年2期
關鍵詞:測量
鄒祿杰,花向紅,巢佰崇,趙不釩,李琪琪
(1.武漢大學 測繪學院,武漢 430079;2.武漢大學 災害監測與防治研究中心,武漢 430079)
地鐵移動測量系統(Subway Mobile Mapping System,SMMS)是一種由多個傳感器集成的軌道測量車[1],它具有快速、動態、高效、安全、精確的優點[2],是移動測量技術在地下軌道交通的一次重要應用[3]。對于SMSS這種多傳感器集成系統來說,由于參與集成的各個傳感器精度不同,其對目標的測量周期不同步,且具有不同的傳輸時延等原因,導致融合中心接收到的不同傳感器的測量數據存在數據異步問題,這些測量數據不能反映目標同一時刻的運動狀態[4]。因此,要使SMMS包含的各種傳感器在動態測量過程中同步工作,必須要給各個傳感器提供一個統一的、高精度的時間基準[5]。目前,在大地測量、地上工程測量、航空攝影測量等能接收GNSS衛星信號的測量領域內,多傳感器集成系統的測量時間基準一般由高精度的GNSS信號[6]來提供。然而,在地下工程測量[7]、隧道測量等無GNSS衛星信號或弱星環境[8]下的測量領域內,需要找到一個穩定、高精度且受外界環境干擾小的時間基準傳感器。
精密晶體振蕩器作為重要的頻率源在通訊、郵電、電子儀器、航空航天、國防軍工等方面具有很廣泛的應用[9],是目前來說比較好的能代替GNSS時間基準的時間基準傳感器。但是,高精度晶體振蕩器提供的時間基準的穩定性和精度仍需要研究,這就需要對高精度晶體振蕩器進行性能測試。目前常用的評估晶振頻率穩定度的方法為量值傳遞法[10],該方法需要選用一個比待測晶振頻率穩定度高 3 倍以上的頻率源作為參考,并且使用高精度的測量設備對待測頻率源進行頻率測量[11]。無論是高穩定度的頻率參考源還是高精度的頻率測量設備,其成本都較高,獲取不便,對常規測試的應用推廣造成了一定的困難[12]。為此,文中設計一個地鐵移動測量系統時間基準傳感器性能測試平臺,利用成本低廉但精度夠高的GNSS秒脈沖信號對待測精密晶體振蕩器進行性能測試,并分析其在地鐵移動測量系統中替代GNSS信號成為時間基準的可行性。
1 時間基準傳感器性能測試方法
1.1 地鐵移動測量系統時間同步方法
在地鐵移動測量系統中,要使各傳感器時間同步[13],需要建立一個時間基準平臺,通過該平臺給系統中其他傳感器發送一個脈沖信號以及一個串口時間數據,其中串口時間數據精確到整秒。待目標傳感器接收到脈沖信號后,在到達脈沖上升沿(也可設置為下降沿)時,將傳感器內部計數器清零并重新計數,并在此時開始工作,從而保證各傳感器同步測量。系統工作一段時間之后,由于不同傳感器工作周期不同、內部計數器精度不同,時間又會產生誤差,此時時間基準平臺會再次發送脈沖和串口時間數據進行校準,以保證系統在長時間工作狀態下也能同步測量。
1.2 高精度晶振性能測試原理
受時間基準同步原理的啟發,將待測晶振看作傳感器頻率輸出源,將GNSS秒脈沖信號看作脈沖信號,利用單片機CPU的計數器功能[14]模擬傳感器內部計數器,進而解算出晶振相較于GNSS信號的誤差。假設以該單片機CPU的最高頻率84 MHz作為計數脈沖,以GNSS秒脈沖1次輸出作為時間間隔,采用上升沿中斷方式(減少計算機的響應時間),若晶振精度與GNSS秒脈沖信號相當,此時CPU上的計數器應該計數84 000 000次。若精度有差距,設單片機CPU計時器在一次GNSS秒脈沖時間間隔內的計時次數為N。那么在1次GNSS秒脈沖時間間隔內晶體振蕩器振蕩頻率精度與GNSS秒脈沖精度誤差S(單位:s)為:
(1)
假如晶體振蕩器連續工作Mh,它與GNSS秒脈沖的精度誤差累積Sm(單位:s)為:
(2)
1.3 高精度晶振性能測試方法
一般來說,對恒溫晶振頻率精度和穩定度影響最大的外界因素就是溫度[15]。文中利用恒溫箱改變測試平臺所處外界溫度環境,研究溫度對恒溫晶振頻率精度和穩定度的影響。測試在地鐵移動測量系統時間基準傳感器性能測試平臺上進行。該平臺由GNSS天線接收器、單片機、接收數據所用計算機以及USR-TCP232-Test串口轉換軟件組成。其中單片機是由GNSS天線模塊、JDWZ25晶振、DOCSC24晶振、單片機CPU以及供電電源等集成,如圖1所示。測試前,一定要保證GNSS接收天線位于戶外寬敞地帶,保證GNSS信號不受干擾。測試時,待測試平臺紅燈閃爍后打開串口軟件,設置好對應參數,開始接收數據。當看到串口數據接收界面有數據顯示后,表示測試平臺能正常工作。利用溫度計記錄下當時的室溫,然后將輸出的數據以文本的形式保存,待實驗數據收集完成后,在記錄表中記錄下實驗相關信息,如日期、試驗開始時間、結束時間、數據文件號等。
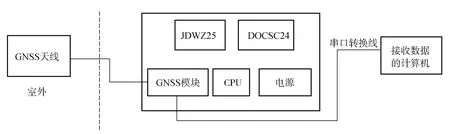
圖1 測試平臺組成圖
1.4 高精度晶振性能評價指標
評估晶體振蕩器性能[16]主要從兩個方面考慮:一是晶體振蕩器振蕩頻率精度;二是晶體振蕩器振蕩頻率穩定度。前者可以通過計算樣本計數值算術平均值與標準值之差,進而計算其與GNSS秒脈沖精度誤差來體現;后者可以通過計算樣本計數值均方差以及誤差分布曲線圖來直觀表達。
由于GNSS秒脈沖信號的精度要比待測晶體振蕩器精度高3個數量級以上,故評估晶體振蕩器振蕩頻率精度只要比較待測晶振精度與GNSS信號精度的接近程度。即比較待測晶振對應的計數值與標準值的差距,記為計數誤差D。由式(1)可知,計數誤差D與精度誤差S的關系為:D越大,S越大,精度誤差越大,晶體振蕩器精度與GNSS秒脈沖精度相差越大,晶體振蕩器精度越低;D越小,S越小,精度誤差越小,晶體振蕩器精度與GNSS秒脈沖精度相差越小,晶體振蕩器精度越高。
評估晶體振蕩器振蕩頻率的穩定度,即評估測試平臺在一段時間內輸出的計數值是否穩定,可用均方根衡量,即:
(3)

2 實驗與分析
一般來說,溫度是晶體振蕩頻率變化的主要因素,為此文中將溫度作為自變量來測試晶體振蕩器的性能,考察晶體振蕩的精度及穩定度,以便選擇合適的高精度晶體振蕩器。文中采用JDWZ25和DOCSC24兩種晶體振蕩器,在室溫和-30~80 ℃溫度環境下進行。-30~80 ℃的環境溫度控制采用的是合肥安科環境試驗設備有限公司的編程式恒溫濕熱試驗箱,它的溫控范圍大概在-70~100 ℃,可以滿足文中實驗要求。
2.1 室內溫度環境下晶體振蕩的性能
選擇室溫大致在20~25 ℃范圍內,每次測試前通過溫度濕度計測量溫度,通過平臺測試獲得兩種恒溫晶振在室溫條件下的大量實驗數據,經過數據處理,其結果見表1。

表1 室溫條件下兩種晶振實驗數據處理結果
由表1可以看出:在室溫條件下JDWZ25晶振的計數誤差要比“DOCSC24晶振小,但JDWZ25晶振的均方差要比DOCSC24晶振大。即在室溫條件下,JDWZ25晶振的精度要比DOCSC24晶振稍高,但穩定性稍差。
2.2 -30~80 ℃實驗環境下晶體振蕩的性能
2.2.1 溫度影響整體性能分析比較
圖2給出了JDWZ25誤差與溫度關系圖。由圖2可以看出:在-20~20 ℃區間內,隨著溫度的不斷升高,JDWZ25恒溫晶振的計數誤差D不斷下降,均方差也大致呈下降趨勢,即JDWZ25振蕩頻率精度和穩定度都在不斷提高;而在20~80 ℃區間內,JDWZ25恒溫晶振的計數誤差D和均方差比較穩定,且數值都保持在很低的水平,即JDWZ25恒溫晶振在常溫或者高溫狀態下振蕩頻率精度很高、穩定性很強,且幾乎不受溫度影響;而在低溫狀態下,JDWZ25恒溫晶振振蕩頻率精度和穩定度隨溫度的降低而降低。

圖2 JDWZ25誤差與溫度關系圖
圖3給出了DOCSC24誤差與溫度關系圖。由圖3可以看出:在-30~80 ℃區間內,隨著溫度的不斷升高,恒溫晶振的計數誤差D一直保持在50附近,均方差保持在1附近,即DOCSC24恒溫晶振無論在低溫、常溫或者高溫狀態下振蕩頻率精度和穩定度都幾乎不受溫度影響。

圖3 DOCSC24誤差與溫度關系圖
2.2.2 特定溫度環境下性能分析比較
為了進一步分析兩種晶振器精度和穩定度與溫度的關系,選擇1個高溫點(60 ℃)、1個室溫點(20 ℃)、3個低溫點(0 ℃、-10 ℃、-20 ℃)進行分析。由于實驗的數據樣本過大且樣本數量無法保持一致,故采用隨機抽樣分析法,各采樣500組數據進行對比分析。
在60 ℃和20 ℃的條件下,DOCSC24晶振的計數誤差穩定在數值51附近上下波動,JDWZ25晶振的計數誤差穩定在數值11附近上下波動。即JDWZ25的振蕩頻率精度要比DOCSC24的”振蕩頻率精度高,見圖4、圖5。

圖4 兩種晶體在60 ℃時精度誤差指標變化圖

圖5 兩種晶體在20 ℃時精度誤差指標變化圖
在溫度為0 ℃的條件下,雖然JDWZ25晶振的計數誤差還是要比DOCSC24晶振的計數誤差小,但是它的計數誤差是在30~40之間波動且波動幅度較大。即在0 ℃的條件下,JDWZ25晶振精度比DOCSC24晶振高,但是與在高溫和室溫條件下相比,精度和穩定度均有較大程度的下滑。DOCSC24晶振還是一如既往的穩定,見圖6。
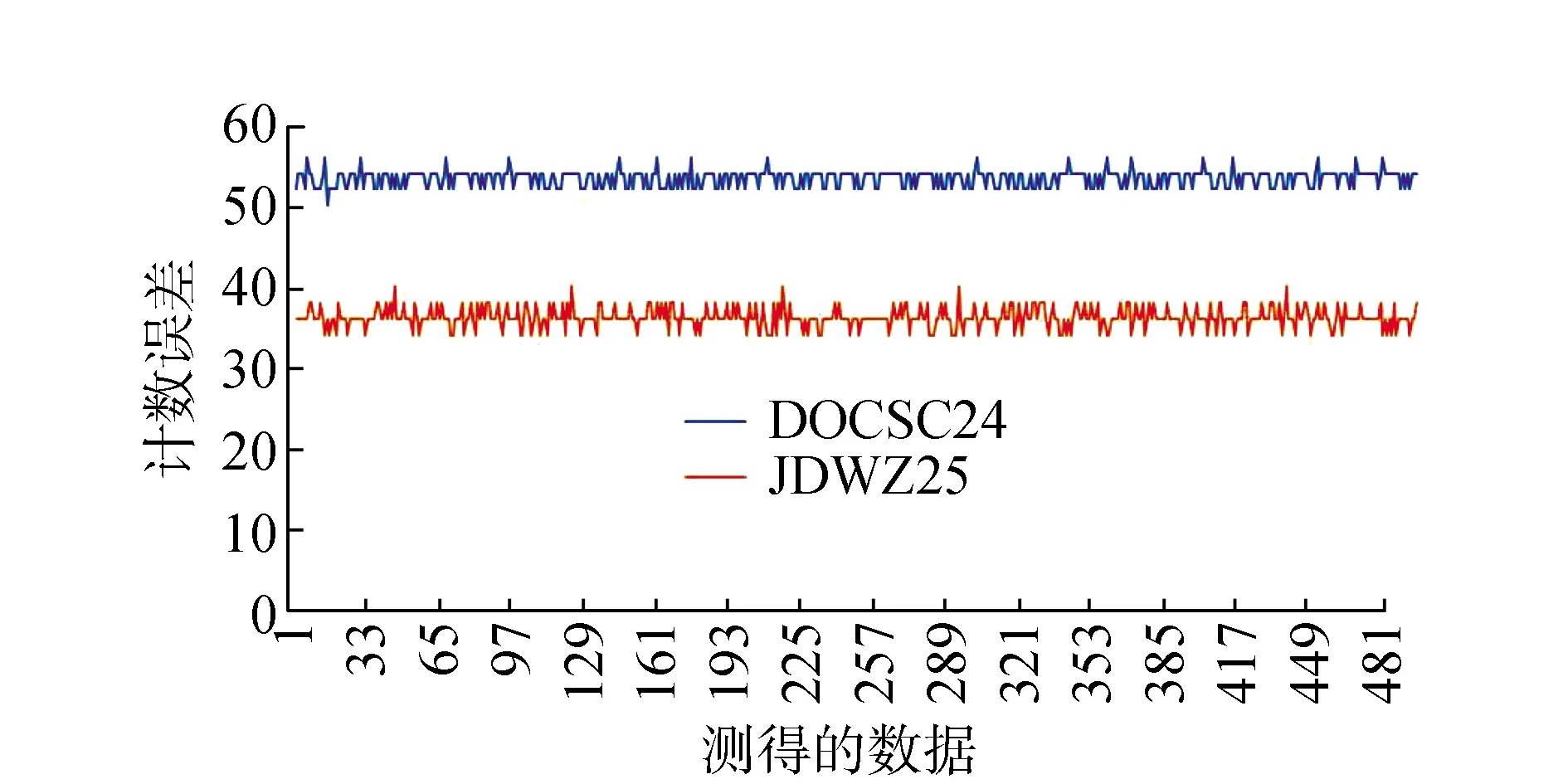
圖6 兩種晶體在0 ℃時精度誤差指標變化圖
在低溫狀態下,JDWZ25的計數誤差要比DOCSC24高,且隨著溫度的降低,二者的差距越來越大,即JDWZ25的振蕩頻率精度要比DOCSC24的振蕩頻率精度低,且隨著溫度的降低,JDWZ25的振蕩頻率精度越來越差,而DOCSC24的振蕩頻率精度則幾乎保持不變,見圖7、圖8。

圖7 兩種晶體在-10 ℃時精度誤差指標變化圖
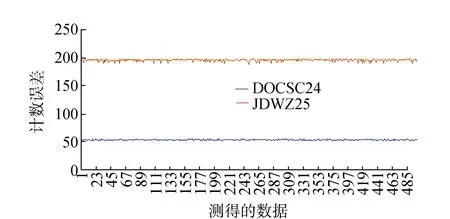
圖8 兩種晶體在-20 ℃時精度誤差指標變化圖
2.3 綜合分析
上面的實驗結果表明:JDWZ25恒溫晶振的振蕩頻率精度在低溫狀態下受溫度影響較大,精度低于DOCSC24;在高溫狀態下,幾乎不受溫度影響,精度高于DOCSC24。而DOCSC24 恒溫晶振的振蕩頻率精度受溫度影響不大。綜合穩定性和精度兩方面,在低溫狀態下穩定性很差的JDWZ25 恒溫晶振顯然不適合作為地鐵移動測量系統的時間基準提供者,而穩定性很好的DOCSC24恒溫晶振在精度方面能否滿足高精度測量的要求,還需對它進一步評估。
根據式(2)可知,晶體振蕩器連續工作Mh,它與GNSS秒脈沖的精度誤差累積為Sm(單位:s),設人推測量車的運動速度為V(單位:m/s),那么晶振工作Mh與GNSS的誤差X(單位:m)為:
X=Sm×V.
(4)
考慮晶體振蕩器連續工作1 h,M=1,推車以1 m/s速度前進,取V=1 m/s,計算可得DOCSC24恒溫晶振在工作1 h之后與GNSS工作1 h的時間誤差以及地鐵移動測量系統工作1 h后各個傳感器測量同一目標位置誤差,見表2。
由表2可以看出:DOCSC24恒溫晶振在1 h內,地鐵移動測量系統各個傳感器測量同一目標與GNSS作為時間基準誤差在2.27~2.31 mm左右,屬于可以接受的范圍。同時,DOCSC24恒溫晶振受溫度影響很小,符合穩定性要求,因此DOCSC24恒溫晶振是可以作為地鐵移動測量系統的時間基準的。

表2 不同溫度條件下DOCSC24測量誤差表
3 結 論
文中設計了一個地鐵移動測量系統時間基準傳感器性能測試平臺。通過JDWZ25和DOCSC24兩種高精度晶振性能測試結果表明:JDWZ25晶振在高溫、室溫狀態下精度和穩定度都表現得十分優良,但在低溫狀態時,精度和穩定度隨溫度的降低劇烈變化,總體呈下降趨勢;DOCSC24晶振在高、室、低溫狀態下都表現得十分穩定,受溫度因素影響很小。且以DOCSC24晶振為時間基準,地鐵移動測量系統各個傳感器測量同一目標與GNSS作為時間基準誤差在2.27~2.31 mm/h左右,屬于可接受的范圍。對比兩種晶振,DOCSC24晶振可以作為地鐵移動測量系統的時間基準。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00