基于關節模塊自由組裝式7 自由度工業機器人
2022-04-06 08:34:46敖冰峰
科學技術創新 2022年8期
鮑 敏 鮑 婕 敖冰峰
(黑龍江職業學院,黑龍江 哈爾濱 150080)
1 7 自由度工業機器人研發背景
習近平總書記在兩院院士大會上表示,機器人是“制造業皇冠頂端的明珠”。其研發、制造、應用是衡量一個國家科技創新和高端制造業水平的重要標志。隨著中國制造2025和工業4.0 的推進,我國已成為世界上最大的工業機器人市場,2020 年,工業機器人人才缺口達到300 萬,2025 年將達450 萬。然而目前全國開設工業機器人專業的大學有300 多所,很多處于起步階段,工業機器人教學儀器設備需求量巨大。但是,現有工業機器人實訓設備成本較高,功能單一,靈活度不高,核心傳動部件也無法滿足高校教學需要。另外,隨著技術日新月異和產品的多樣化,簡易的往復機已經不能滿足形狀各異和復雜工藝的要求。工業柔性機器人應用技術已經不可逆轉地成為了自動化生產線中不可缺少的一個重要環節,仿生機器人研究也成為機器人學的熱點之一,但是由于多年的進化,生物的各關節運動一般難以用機械結構完全實現。近期,國際知名機器人廠商紛紛發布七自由度工業機器人產品,這引發了我們的思考。七軸工業機器人從二十世紀七十年代末逐步發展至今,為工業自動化的推進起到了重要的作用。由于具備其獨特的技術優勢,因此其相關產品動向更值得我們深入研究。
2 7 自由度工業機器人特點
2.1 改善運動特性
機器人運動學中存在著三個問題,這三個問題極大地限制了機器人的運動。
2.1.1 奇怪的配置。當機器人處于奇異位形時,其末端執行器不能沿某一方向運動或施加力矩,因此奇異位形對機器人的運動規劃有很大的影響。
2.1.2 關節位移超限。在實際工作條件下,機器人各關節的角度范圍是有限的,理想狀態是正180 度或負180 度,但很多關節做不到。此外,7 自由度機器人可以避免角速度移動過快,使角速度分布更加均勻。
2.1.3 三是工作環境存在障礙。在工業環境中,在許多場合存在著各種各樣的環境障礙。7 自由度機器人不僅可以改變末端機構的姿態,而且可以改變末端機構的位置。
2.2 改善動態特性
對于7 自由度機器人,利用其冗余自由度不僅可以通過軌跡規劃獲得良好的運動學特性,而且可以通過其結構獲得良好的動力學性能。
7 自由度機器人可以重新分配關節力矩,這涉及到機器人的靜平衡問題,即作用在末端的力可以通過算法來計算。對于傳統的六軸機器人,各關節的受力是確定的,其分布可能不合理。而7 自由度機器人可以通過控制算法來調整各個關節的力矩,使薄弱環節的力矩盡可能小,從而使整個機器人的力矩分布更加均勻合理。
2.3 容錯
當機器人發生故障時,如果一個關節發生故障,傳統的6 自由度機器人將無法繼續工作,而7 自由度機器人則可以通過重新調整故障關節的速度(運動容錯)和重新分配故障關節的扭矩(動態容錯)來繼續工作。
3 基于關節模塊自由組裝式7 自由度工業機器人功能
3.1 不封蓋RV 減速器,國內首創
7 軸工業機器人是最接近人類手臂結構的機器人,本工業機器人產品以7 自由度的高起點出發兼顧3 至7 自由度研發設計,既可以應用于智能工廠代替人工,也可應用于高校機器人教學。有以下6 大特色:(1)關節模塊可實現3-7 軸的靈活拼裝運行;(2)創新開發了核心傳動部件-RV 減速器;(3)為適用不同場合,設計專利底座結構;(4)無線控制,平板電腦示教編程;(5)開發了虛擬仿真互動訓練平臺;(6)與同類產品相比,一機多能,性價比高。
可不封蓋運行的工業機器人系列RV 減速器,能清晰看見內部機構,方便演示工作原理,且能應用于工業機器人關節軸中,用于組建多關節軸機器人,其內部至少三處鏤空,可穿過導線、氣管,不影響減速機正常運轉,為工業機器人傳動機構教學提供強力支撐,填補了此項產品國內空白,見圖1。

圖1 關節模塊減速器拆解狀態
3.2 自由組裝式多軸機器人,面向不同應用
市面上的工業機器人產品結構都是固定自由度,功能單一,利用自研不封蓋運行的RV 減速器、核心傳動機構及機械結構,以關節為單元,可自由拼裝成3 自由度、4 自由度、5自由度、6 自由度、7 自由度機器人。相比較市面上的單一功能的實訓臺,集成了工業機器人教學中幾乎全部的實訓操作項目,一臺實現多臺的功能,見圖2。

圖2 自由組裝3-7 自由度工業機器人形態
3.3 產品采用專利底座設計,方便換裝移動平臺
現有的工業機器人安裝底座通常是固化的,無法進行位置調整,無法適應各種安裝情況,同時缺乏在減震和加固方面的安全性,工作發生碰撞時易傾倒造成設備損壞和人員危險。本機器人底座采用卡槽和門形銷可拆卸結構專利設計,可安裝在移動AGV 小車等多平臺中使用,安裝穩固、可快速切換,方便安裝于不同平臺。
3.4 創新平板電腦示教編程,無線連接、離線仿真編程
機器人除傳統示教器外,創新開發了在平板電腦(或手機)上示教,既實現傳統控制器的功能又可離線仿真編程,無線連接,擺脫線纜束縛,使用方便。
3.5 配套虛擬仿真互動訓練系統,直觀生動
配套開發了虛擬仿真互動訓練系統,能夠在仿真環境下學習機器人結構、組成原理,直觀生動,為高校工業機器人機械結構教學提供支撐。
3.6 一機多能,高性價比
1 臺設備即可實現多方面實訓應用,既可實現多場合工業實際應用,又可完成本體認知、傳動機構認知、示教編程、虛擬拆裝、面向不同應用等5 方面以上實訓教學應用,一機多能。量產價格僅為3 萬元,相比市場上功能單一,價格動輒三五十萬元的7 自由度工業機器實訓設備,性價比優勢明顯。
4 基于關節模塊自由組裝式工業機器人技術參數
七軸機器人包括三個主要部件,機器人本體、控制柜、示教器,所有的編輯工作都在示教器上完成,當作業編輯完成后,點擊下載按鈕,將命令下載到控制柜中的主控板中,切換至運行模式,點擊運行按鈕開始執行下載命令。當遇到不可預知的運動狀態時或危險時,按下急停按鈕,機器人立即停止。
4.1 控制柜
硬件采用48v、24v、5v 電源供電,7 路步進電機驅動器,16 路繼電器,wifi 模塊,儲存模塊、控制按鈕、主控板(stm32f103zet6)組成。
控制柜按鈕布局,見圖3。
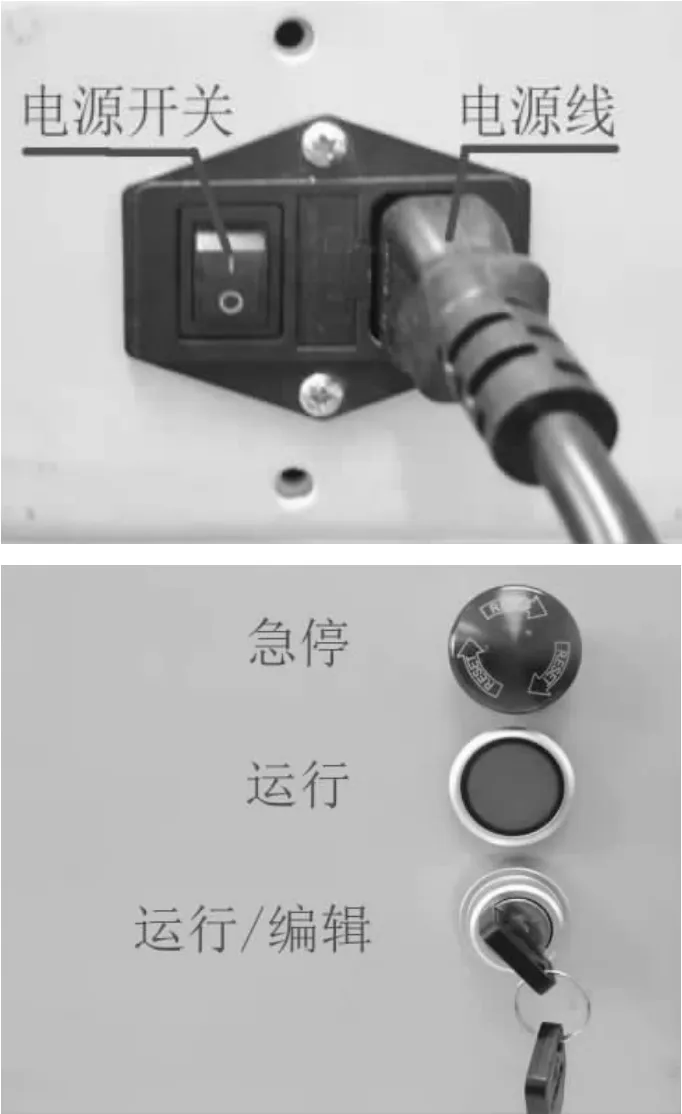
圖3 控制柜按鈕布局
4.2 示教器
軟硬件配置:移動端,安卓5.0 以上版本,分辨率2560*1600,具備wifi 網絡。pc 端,win7、win10 系統,具備wifi網絡。
4.3 開機
連接電源線,確定復位按鈕彈起,撥動電源開關,電源指示燈亮起,待工作指示燈間隔閃爍時,開機完成。
示教器軟件安裝:在安卓平板電腦或安卓手機上安裝7自由度工業機器人示教器控制軟件。pc 機上拷貝七7 自由度示教器軟件到硬盤上。
示教器連接:當7 自由度工業機器人正常開機后,確保模塊開關轉動到編輯模式,查看wifi,選擇HY-001 網絡服務,輸入密碼“12345678”,網絡連接成功后,啟動示教器軟件。當看到菜單頭信息反饋欄中出現主控板的反饋信息時,示教器鏈接成功。
4.4 編輯模式
控制模式選擇開關,擰動到編輯模式,急停開關彈起。
在編輯模式下,示教器可控制機器人姿態、編輯作業等操作。
4.5 示教器功能布局(圖4)
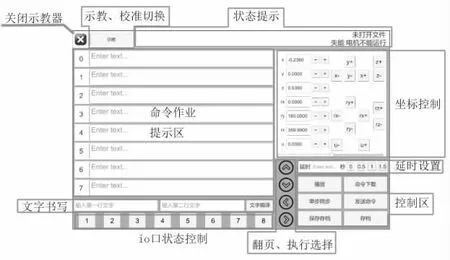
圖4 示教器功能布局
使能:示教器最左測,黃底黑字,寫著使能。當示教操作時,要用一根手指按著使能按鈕,當機器人發生不正常的運動時,松開使能按鈕,機器人立即停止。
關閉示教器:點擊后關閉示教軟件。
示教、校準切換:切換示教模式和校準模式。示教模式下,對機器人進行示教操作,記錄、保存、命令下載等操作。校準模式下,對機器人進行原始狀態校準,使機器人可以在示教模式下正確運行。
狀態提示:提示機器人的當前姿態和狀態信息。
命令作業提示區:記錄和提示作業內容,點擊作業可進行編輯。
文字書寫:機器人寫字功能的文字輸入和編輯執行。
IO 口狀態控制:控制機器人的外部IO 口的狀態。示教器可控制8 個外部IO 端口狀態。
坐標控制:控制機器人的姿態。最上面三組控制按鈕,可控制末端執行器的位置坐標,點擊對應軸控制按鈕,可控制對應軸,沿著軸方向移動。中間三組控制按鈕,控制末端執行器的角度,同樣點擊對應軸旋轉控制按鈕,可控制對應軸,沿著軸方向轉動。最下面一組按鈕,可控制機器人擺臂姿態。最下面的滑動條控制軸的調節速度,默認是中速,向右滑動加速,向左滑動減速。
延時設置:設置當前作業的延時等待時間,機器人在運行時,執行停止等待的時間,主要用途是,外部電路元件(例如:電磁換向閥)運行時需要時間來執行功能,延時功能就是配合外部電路元件的功能執行。
控制區:播放作業、執行示教命令、下載命令、存檔的保存和讀取。
4.6 校準功能布局(圖5)
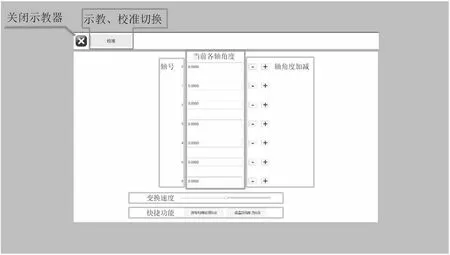
圖5 校準功能布局
校準模式下,對機器人進行原點設置。
軸號:提示各軸編號。
當前軸角度:提示和手動設置機器人的軸角度。
軸角度加減:按鈕方式設置機器人的軸角度。
變換速度:調整按鈕角度設置的速度。
快捷功能:所軸轉動回0 點,機器人各軸,轉動回0 點。設置所有軸為0 點,設置機器人當前位置為0 點。
4.7 運行模式
運行模式選擇開關,擰動到編輯模式,急停開關彈起。點擊運行按鈕,機器人將執行由示教器下載到控制柜中主控板的程序。
4.8 串口命令
通過串口命令,可控制七軸機器人的的所有功能,包括但不限于是示教器的指令控制,方便用戶二次開發,功能擴展。
4.9 軸角度控制:用于調整機器人軸角度
“軸號”=“角度”,“軸號”=“角度”;
例如:0 號軸轉動到10.5 度。 命令:0=10.5;
當需要多個角度聯動時,需要多個角度命令組合發送,多條命令用“,”隔開;
例如:1 號軸轉動到11.3 度,3 號軸轉動到-10 度。命令:1=11.3,3=-10;
4.10 IO 控制
用于控制外部IO 口狀態,開和關,此命令可以和軸角控制命令一同使用,串口命令,最多可控制16 個IO 口狀態。
“IO 編號”=“設置狀態”,“IO 編號”=“設置狀態”;
例如:p1IO 端口狀態設置為開;
命令:p1=1;
4.11 軸角度設置:修改當前軸角度
set:“軸號”=“角度”,“軸號”=“角度”;
例如:設置0,1 軸角度為0;
命令:set:0=0,1=0;
4.12 停止、急停:stop
4.13 急停復位:stop_over
4.14 暫停:pause
4.15 播放、繼續:play
4.16 存儲命令:main:“多行或單行命令”;
命 令 :main:0=10,1=10,p1=1;0=-10,1=-10,p1=0
4.17 讀取存檔數據:get_all
4.18 清空存檔:clear
4.19 設置主控板wifi 設備名和密碼
例如:設置wifi 設備名“HY-001”,密碼“12345678”
命令:ssid:ap_ssid=HY-001,ap_pw=12345678
7 自由度工業機器人是對人手臂的真實還原,隨著工業機器人產業的逐漸成熟,近年來,跨國機器人巨頭們紛紛推出7 軸工業機器人,這種協作機器人是工業機器人的一類,是能夠與人在生產線上協同作戰,充分發揮本體效率及人類智能的新型機器人。成為了工業機器人高端新市場和眾多企業的突破目標,也被視為高端工業機器人的標志。
猜你喜歡
兒童故事畫報·發現號趣味百科(2025年8期)2025-08-23 00:00:00
中華詩詞(2022年6期)2022-12-31 06:41:24
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
少先隊活動(2021年4期)2021-07-23 01:46:22
中國科技論壇(2017年7期)2017-07-25 08:49:53
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
商業評論(2014年9期)2015-02-28 04:32:41
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54