自主移動機器人動態避障軌跡規劃方法
2022-04-06 08:35:24邱少林
科學技術創新 2022年8期
邱少林
(安徽博研信息科技有限公司,安徽 蕪湖 241000)
自主移動機器人作為機器人領域的熱門研究對象,正在引起極大的關注。移動機器人可應用于倉儲物流、醫療、服務等多個領域[1],但通常需要面臨復雜的工作環境,在這些場景中,移動機器人需要規劃出一條連接起點和目標點的連續無碰撞軌跡,被稱為軌跡規劃問題[2-3]。
先進的軌跡規劃方法是移動機器人領域研究的關鍵技術[4],不同于路徑規劃[5],軌跡規劃需要考慮路徑約束、環境無碰撞約束以及機器人運動學約束等約束與要求,根據路徑與約束,生成一系列包含位置和速度信息的位姿序列,使機器人從起始位姿安全運動到目標位姿。在無法獲得完整環境信息或者環境中存在動態障礙物時,移動機器人需要對環境變化做出實時反應[6]。
本文提出一種基于時間彈性帶的速度求解與避障聯合機制的軌跡規劃方法,應用于阿克曼結構的類車機器人。考慮并優化TEB 多種約束條件,保證類車機器人在動態環境下具有緊急避障能力。建立工作空間勢場求解機器人速度,提高運動舒適性。分別在靜態和動態環境下進行仿真實驗,分析該方法的優越性。
1 TEB 算法


最終軌跡由位姿信息與時間間隔信息組成,表示為:

TEB 通過最小化目標函數得到最優軌跡,其中 γn是約束函數的權重系數,f(P)是各個約束目標函數之和。約束目標函數將在下文提出。最終TEB 算法優化結果為:

2 速度求解
建立工作空間勢場U,規劃機器人速度。工作空間勢場由目標點吸引勢場U1,障礙物排斥勢場U2以及動態障礙物勢場U3組成。基于工作空間勢場,建立求解機器人速度的函數:

其中,μ 是速度-勢場轉換系數,v 是速度。
3 約束目標
目前,還需要對移動機器人加速度a 和轉向角α(t)進行實時控制:u(t) =[a, α(t)]。移動機器人實時運動狀態由式(7)表示,β (t)是機器人后軸中心轉向角度,L 為機器人軸距。


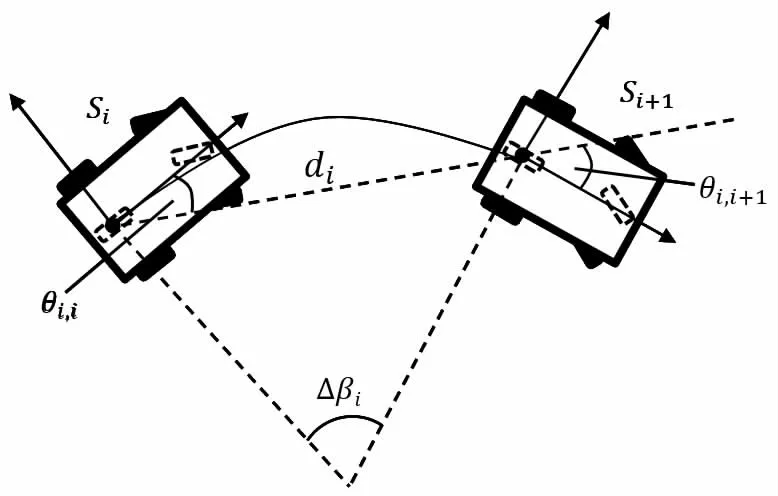
圖1 移動機器人轉向示意圖

通過移動機器人自身傳感器確定障礙物的位置,位置信息不斷更新。引入障礙物約束函數:

時間最優要求所有位姿之間的時間間隔盡量最小化,以最短的時間到達目標點,提高效率。時間最優約束為:

在任何時刻的轉彎半徑R(t)不能小于最小轉彎半徑Rmin。轉彎半徑約束為:

為使機器人到達目標點時速度為0,設置目標點加速度約束:

4 實驗分析
本節為驗證所提方法的有效性并測試其在特殊方面的優越性,分別進行靜態實驗和有動態障礙物的動態試驗。
如圖2 所示,靜態場景實驗結果表明,NTEB 可以規劃出合理的運動軌跡,而且對速度的控制具有良好的運動舒適性,相比于TEB 整體運動時間縮短30%,速度相對變化減少50%。表明NTEB 運動規劃方法具有更好的穩定性,同時提升了移動機器人運動效率。
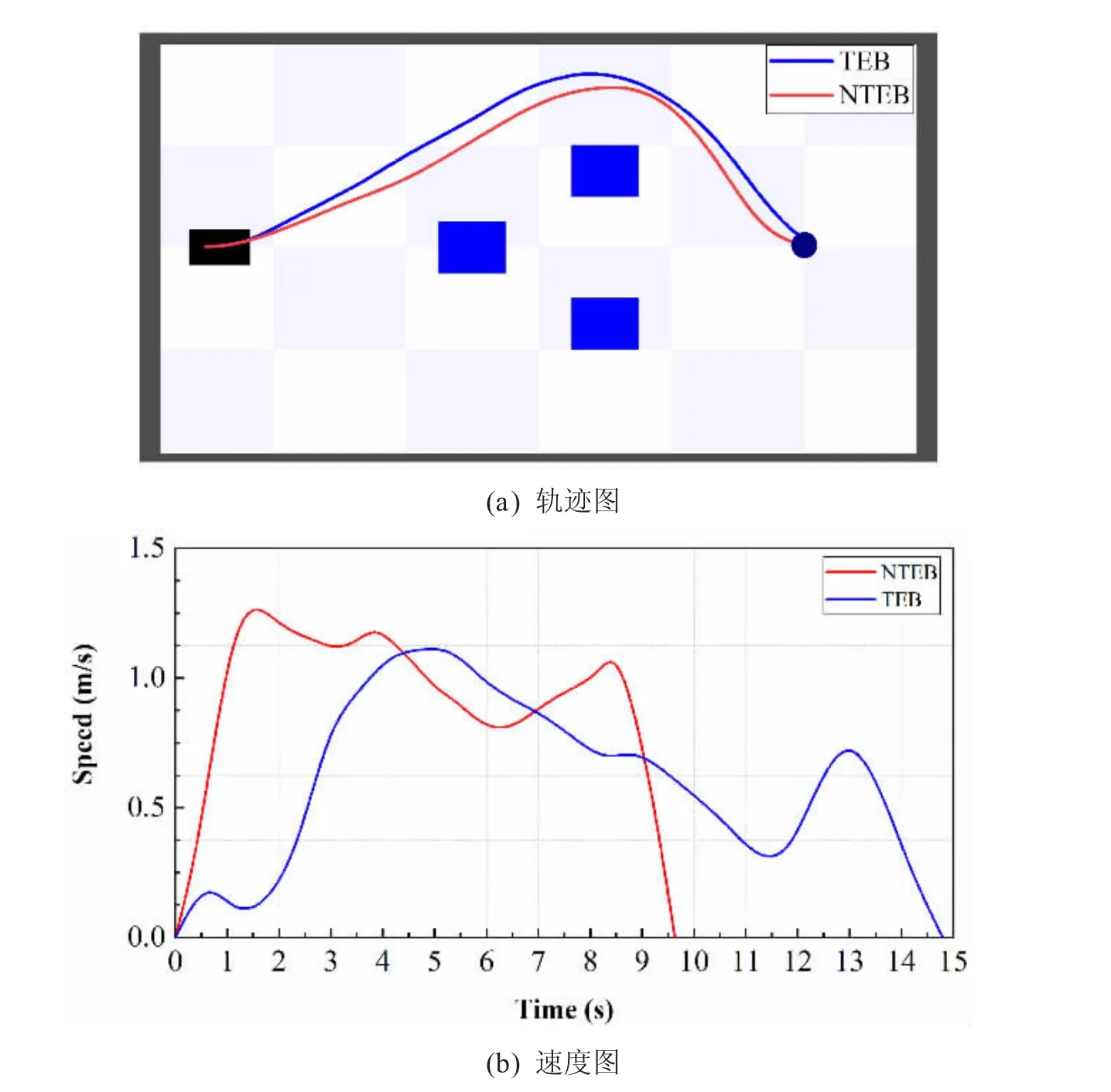
圖2 靜態場景實驗結果
如圖3 所示,動態場景實驗證實了NTEB 在動態避障方面的效果,所建立的代價地圖檢測區域有效執行了應對動態障礙物的避障策略,確保機器人在緊急情況下具有相應的應急處置能力,尤其在動態障礙物初始時刻不可見的情況,移動機器人依然安全平穩運行,提高運動安全性。

圖3 動態場景實驗結果
5 結論
本文提出一種基于時間彈性帶的軌跡規劃方法,用于求解移動機器人動態避障問題。軌跡規劃需要考慮環境中不確定障礙等因素,因此該方法包含機器人運動速度、運動狀態、障礙物等多種約束條件。結合多種約束條件,完成從起始點到目標點的無碰撞軌跡規劃,移動機器人實現平穩無碰撞運動。實驗結果表明,該方法具有優越的運動學特性和良好的避障規劃效果。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:21
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28
智能系統學報(2015年4期)2015-12-27 09:38:35