基于神經網絡PID 算法控制的禽舍液體混合系統研究*
2022-04-07 03:42:40趙海霞王少豪付天帥
計算機與數字工程 2022年3期
趙海霞 王少豪 尹 權 付天帥
(青島科技大學機電工程學院 青島 266061)
1 引言
隨著社會的快速發展,人們生活水平的提高,對雞類產品的需求也越來越多,但是現有養雞場的添加混合供水操作方法明顯不適用于大規模的現代化養殖,添加劑、水的添加都需要相關工作人員親力親為,隨著小雞的長大及夏季的來到,水的消耗量會迅速增加,這就需要專門的工作人員進行此項工作,工作人員的勞動強度被極大的增加,費時費力,為了減少這類情況的發生,本設計以STC89C52RC 單片機為控制核心,多個輔助單元為支撐通過多學科融合設計了一種基于的智能混合液體系統,該系統用流量傳感器來檢測注入混合罐水和添加劑的含量,來確保注入水和添加劑含量的精度,使用液位傳感器來檢測液位,當液位傳感器檢測到混合液降至指定液位時,重新向混合罐內注水并循環以上過程。當添加劑不足時蜂鳴器響,報警系統工作。以上過程都由傳感器全程監測并在LCD1602上顯示,可以讓用戶清晰地知道注入水和添加劑的含量。
2 系統總體方案的設計
本設計主要包括軟件和硬件兩個部分,軟件中以Keil uVision4 的51 版本進行編程,硬件中STC89C52RC 單片機為控制核心,此外還要有多個檢測模塊、執行模塊、電源模塊以及人機交互系統,由軟硬件之間協調配合,實現液體混合。檢測模塊主要由液位檢測模塊、流量檢測模塊兩個部分,執行模塊由電機驅動模塊和電磁閥組成,輸出模塊由顯示裝置和報警裝置組成。總體設計框圖如圖1所示。
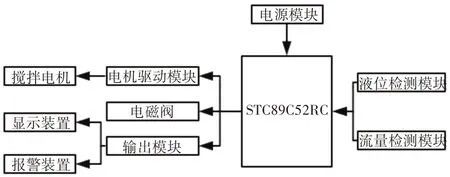
圖1 系統總框架圖
3 系統硬件設計
3.1 電源模塊
電源是整個系統的動力源,為系統的正常運行提供保障,是模塊平穩運行的重要基礎,在本系統中的控制模塊和檢測模塊的工作電壓為5V 直流電,而生活電壓一般為220V 交流電。因此首先我們需要將220VAC 處理為5VDC,主要通過降壓、橋式整流、電容濾波、穩壓等一系列方式達到目的。具體電路圖如圖2所示[1]。
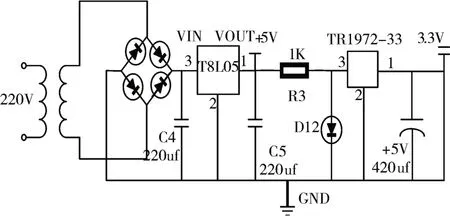
圖2 電源電路圖
3.2 單片機控制模塊
根據本系統的需要,選用STC89C52RC 微控制器為本系統的控制核心,STC89C52RC 是一款具有高性能、低功耗且具有8K 字節系統可編程Flash 存儲器,操作簡單方便快捷,適用于本系統的控制工作。單片機控制電路如圖3所示[2]。
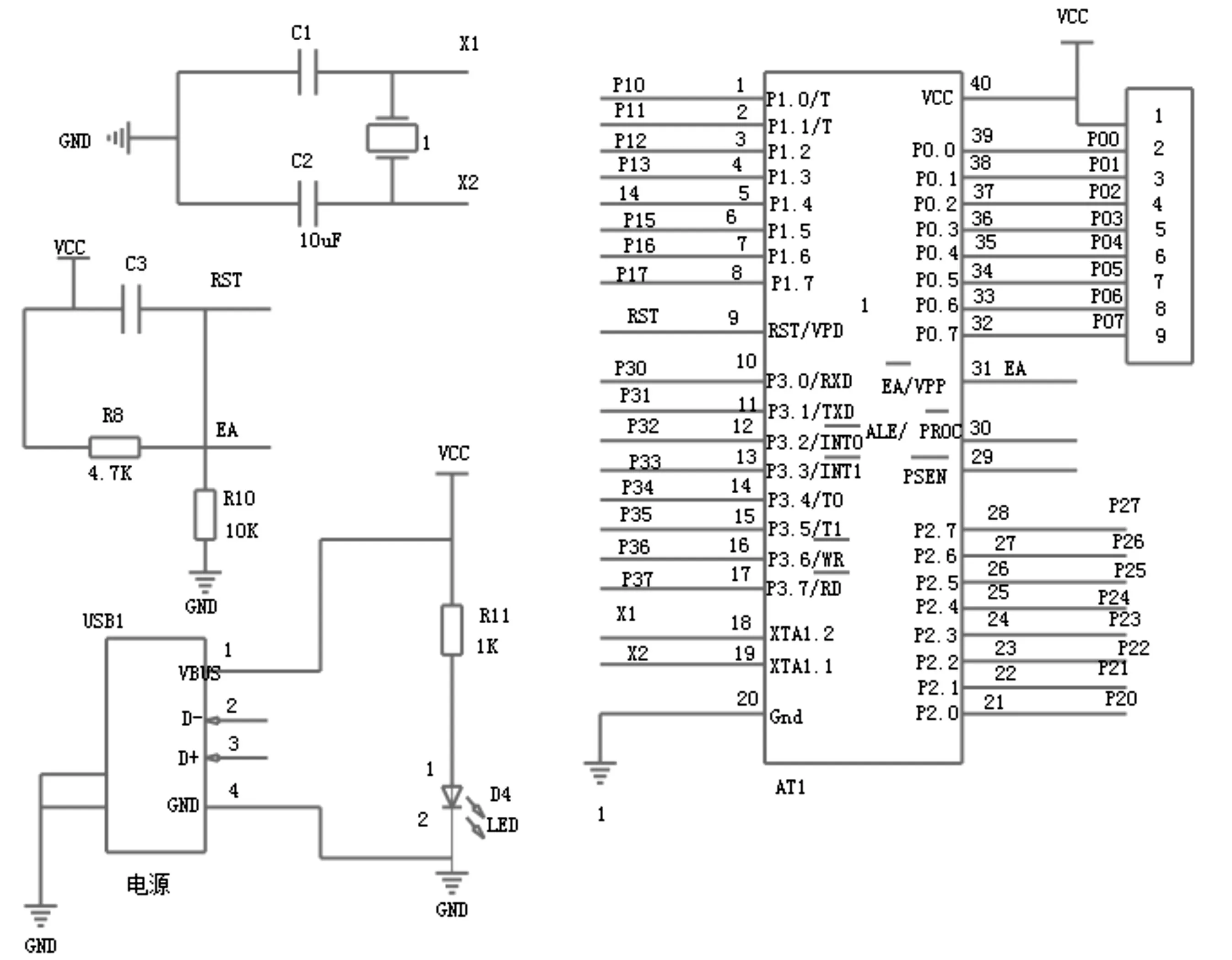
圖3 STC89C52控制電路
3.3 流量檢測模塊
在本設備中我們需要將水和添加劑按照一定的比例混合,因此我們需要流量檢測模塊對所需添加的水和添加劑和含量進行檢測。本設計選用液體渦輪流量計,本流量計可以用來測量水油等各種液體體積流量,并且具有小、輕、精的特點。此外還可以搭配定量控制箱,通過流量計通過流量計提供流量信號給單片機控制模塊,在單片機中設定需要的定量值,當注入水的含量達到設定的液位高度時,注水電磁閥關閉注入添加劑的電磁閥開啟,到達水和添加劑設定比例時自動關閉電磁閥。
3.4 液位檢測模塊
在本設備中需要往混合罐中添加的主體有兩個,并且需要按照比例進行混合,只有一個流量傳感器控制流量,在流量傳感器出現故障時,會出現流量無法控制的尷尬場景,因此本設計采用液位檢測傳感器進行容錯,限制設置注入水的最高液位和混合液的最高液位,即使流量傳感器出現故障也可以最大程度地保障水和添加劑的比例混合,由于是容錯裝置,所以精度不需要很高,在本設計中選用較為傳統的電阻式液位傳感器,這種傳感器價格較低,精度方面也可以滿足需要。該傳感器的輸出電壓在0~5V之間隨著液位高度的變化而產生對應的電壓波動,控制系統可以根據傳感器的輸出電壓判斷出相應的液位高度[3],當注入水的含量達到設定的液位高度時,注水電磁閥關閉,注添加劑的電磁閥開啟,到達水和添加劑設定比例時電磁閥關閉。
3.5 電機驅動模塊
本設備要求使水與添加劑完全攪拌混合,因此在混合罐內設置的攪拌機用于使液體充分混合,在設備正常運轉時進水裝置以及攪拌器都需要電機驅動,一般來講定量控制液體進入混合罐中伺服電機是最好的選擇,但是本著節約成本的原則,本設計采用步進電機和L293D 驅動器驅動[4]可以實現同樣的目的。
3.6 輸出模塊
輸出模塊部分由報警裝置和顯示裝置兩部分組成,本設計采用LCD1602 液晶進行人機交互界面的顯示控制,它是一款點陣型液晶模塊[5]。在電子表、汽車、空調等電子領域廣泛應用,可以將混合罐中的液位信息、注水和添加劑的流量信息如數反映在液晶顯示屏上,可以更加直觀地觀察到設備的工作狀態。報警裝置提供報警功能,在傳感器出現故障以及添加劑液位不足時報警,蜂鳴器發出警報。液晶顯示電路原理圖如圖4 所示[6]。
4 系統軟件設計
本系統所采用的編程軟件為Keil uVision4 的51版本[7~8],該程序可以在線仿真調試,能夠方便快捷地編寫所需程序。主程序流程圖如圖5所示。
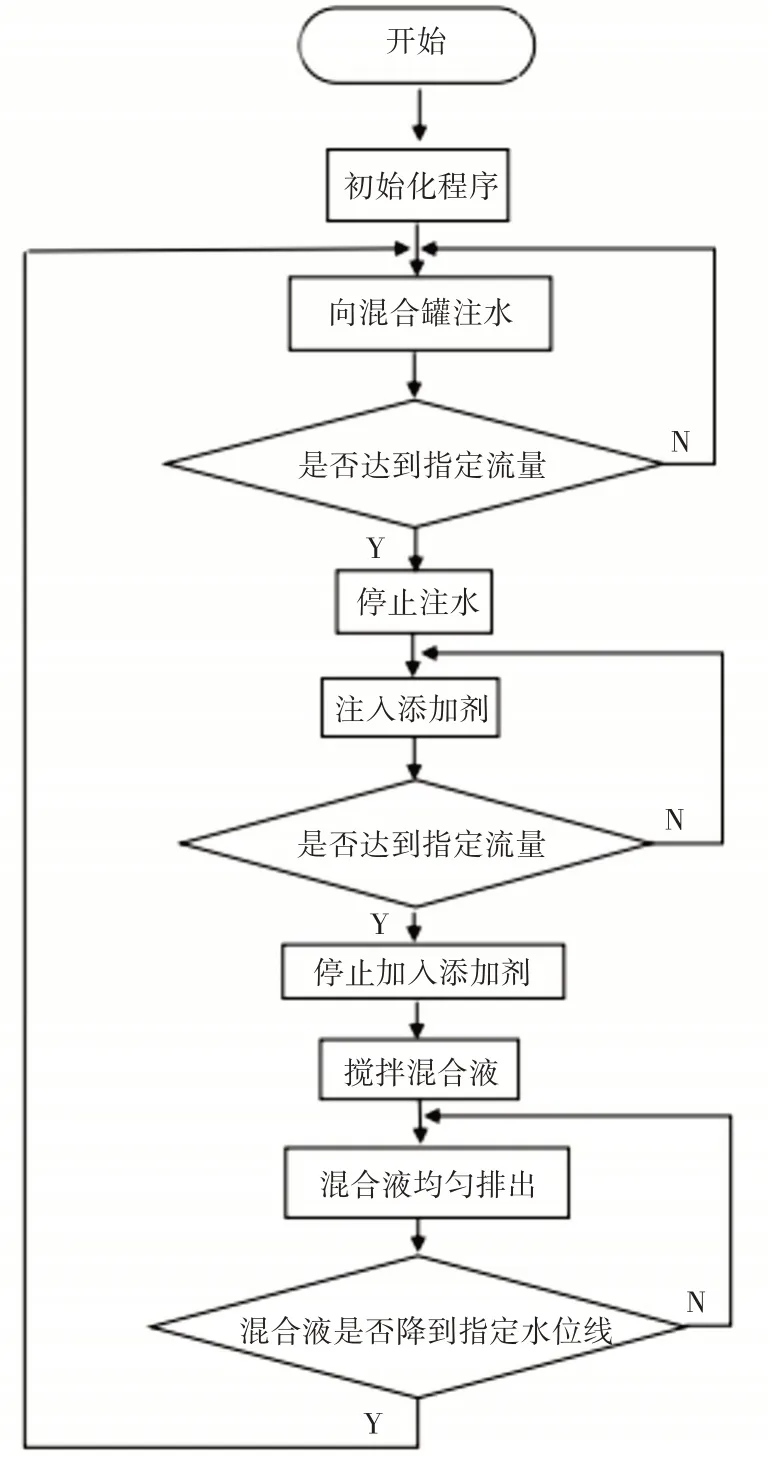
圖5 主程序流程圖
對程序進行初始化設計,然后由儲水罐向混合罐內注水,此時流量檢測模塊開始工作,檢測注入混合罐水的流量數據,流量傳感器將檢測到的數據經過處理后傳遞給單片機STC89C53RC 并實時顯示在液晶顯示屏上,當達到指定水流量時停止水的注入,并開始向混合罐內加入添加劑,當達到添加劑所需容量時,停止注入添加劑,啟動攪拌電機使混合液攪拌均勻,然后輸送到各個雞舍,當液位傳感器檢測到混合液降至指定液位時,重新向混合罐內注水并循環以上過程。當添加劑不足時蜂鳴器響,報警系統工作。以上過程都由傳感器全程監測并在LCD1602上顯示,可以讓用戶清晰地知道注入水和添加劑的含量。
此外,該設備還用到定時器中斷功能,混合罐需要每隔一段時間進行一次清洗,保持混合罐的清潔以保證混合精度以及小雞的健康。
5 供水系統控制
在本設計中,在往混合罐中注水和添加劑的過程中,電磁閥的出水口為非線性狀態,并且在檢測液位的過程會有較大的滯后性,在進行數學模型的建立時,必然后帶來精確度不足[9]的缺陷,為了減少甚至消除這種滯后性帶來的影響,需要選擇合適的算法。傳統意義上的PID 調控算法有很好的可靠性和魯棒性,但缺點也很明顯具有很大的超調量值,所以我們為了提高供水系統的控制精度,點這里采用神經網絡PID進行禽舍液體混合控制。
5.1 PID控制系統
對比例控制方法而言,傳統PID 算法是最為簡易也是最為常見的的一種控制算法,其控制原理如圖6所示。
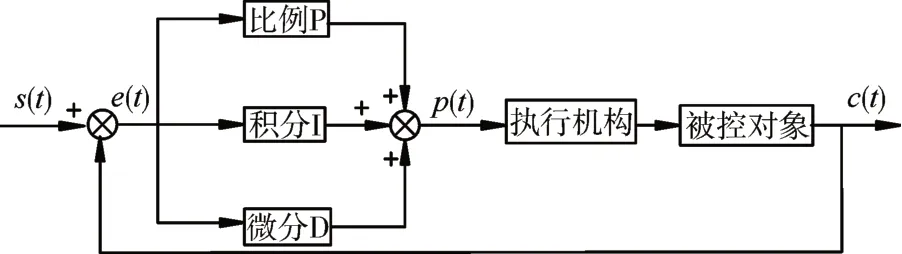
圖6 PID控制原理圖
上圖中,c(t)-輸出響應;s(t)-輸入信號;并引入負反饋和輸入信號。PID是由比例(P)、積分(I)、微分(D)所構成的控制器,該PID 控制器為線性操控,依據r(t)和y(t)來搭建偏差e(t)的表達式,即

將t時刻的實際輸出值與設定值的偏差e(t)輸入這三個部分進行計算可以得到控制量p(t),即:

其中,Kp為比例放大系數,TI為積分時間,TD為微分時間。
對于本系統而言,儲料罐中混合液的液位處于一個波動變化的狀態,所以我們需要對液位的高度變化進行實時的監測,并把所采集的信息送入PID控制臺,然后根據采樣時刻的偏差值來運算,所以要對控制量p(t)進行離散化處理[10]。處理之后的表達式為:

5.2 神經網絡PID控制系統
神經網絡PID 算法將神經網絡算法和PID 算法相結合,由于神經網絡算法是模仿人大腦思維方法的數學模型,因此需要通過對樣本值加以訓練與掌握進而能夠適應環境的改變,而對本系統而言,我們也可以將注水裝置設備作為一個輸出層,直接由神經網絡對輸出的電壓值作為樣本加以練習。得到最佳的控制樣本,對PID 控制算法的P、I、D 三個參數進行修正。神經網絡PID 控制系統結構框圖如圖7所示。
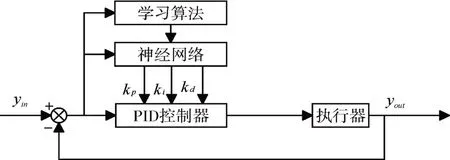
圖7 神經網絡PID控制原理框圖
神經網絡算法設計實現過程如下[15~16]:
設輸入網絡的數學表達式為

輸出層表達式為

這里三個輸出分量分別對應于PID 控制算法中三個可調節控制參數,即:

輸出層激活函數為

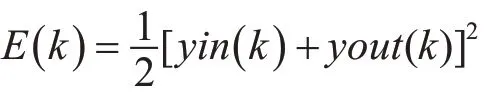
性能指標函數為
由此可得輸出的訓練算法為

其中:
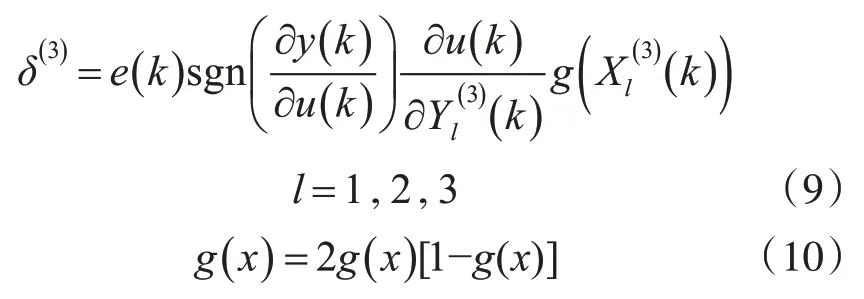
這樣,就可以完成對該系統的神經網絡算法的訓練,使其能夠適應液位變化情況,從而達到更高的控制精度。
6 結語
在系統開發過程中,運用STC89C52 作為本設計的控制單元,并且運用傳感器技術,實現傳感器檢測和控制單元的對接,更好地實現了智能化控制,采用神經網絡PID 控制算法,使得進水裝置控制精度和抗干擾性都有了很大的提高。確保所需添加的水和添加劑達到預期的含量,在家禽養殖生長飲用水的添加上具有廣泛的前景和實用性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
