攝影測量與工程測量的結合應用分析
——攝影全站儀+數碼攝影機
2022-04-07 09:08:56寧艷雷
工程與建設 2022年1期
寧艷雷
(龍口市經緯城市規劃技術服務有限公司,山東 煙臺 264000)
0 引 言
在工程相關領域發展逐步呈現現代化趨勢的背景下,早期的獨立攝影測量技術在應用中的優勢已無法體現,要從核心技術層面提升工程測量的精度,應在進行測量作業時對接兩種測量方法,并將對應測量設備進行融合使用,實現對測量成果精度與質量的提升。
1 結合方案設計
1.1 構建攝影測量與工程測量共線方程
為了實現兩者在測量作業中的有效結合,需要在作業前,根據兩種測量設備的作業需求,構建對應的共線方程,以此種方式,確保測量結果指向性的統一化[1]。在使用全站儀進行測量時,可將鏡頭指向的正北方向作為工程測量坐標體系的初始化位置[2]。測量中坐標系的對接過程如圖1所示。
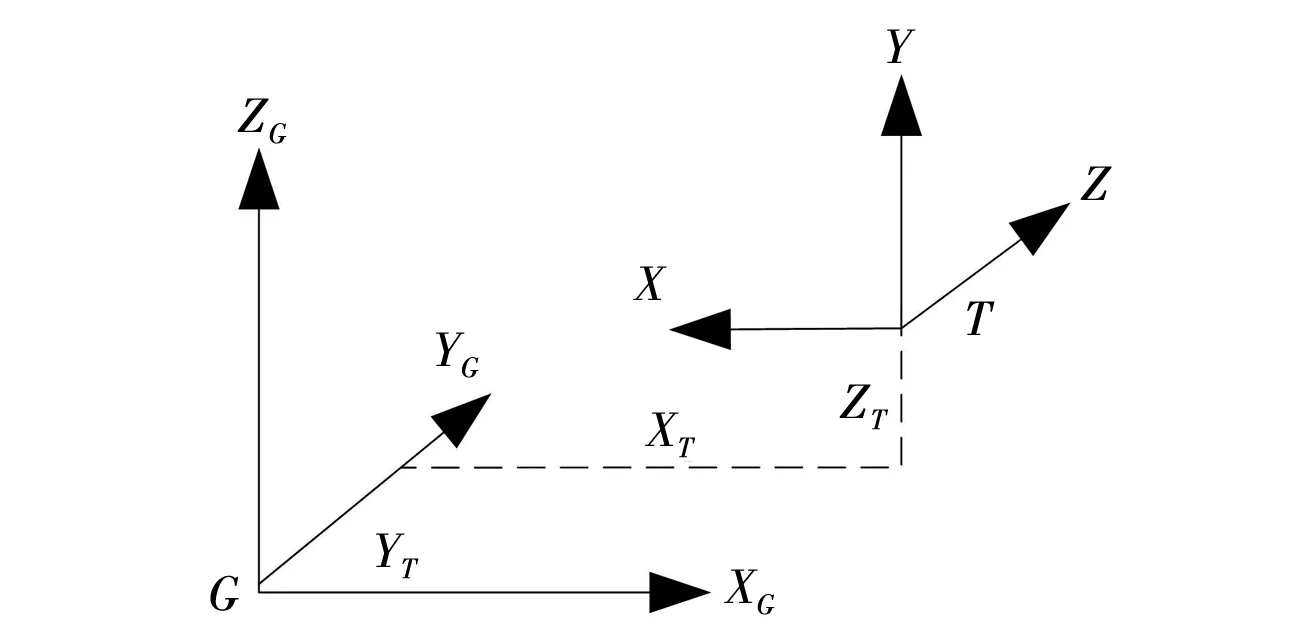
圖1 攝影測量與工程測量坐標系的對接
根據圖1中坐標系的空間位置,進行對應坐標點關系的描述,如公式(1)所示:
(1)
其中數碼攝影機的坐標(x,y,-f)與攝影全站儀的坐標(X,Y,Z)有下述關系:

(2)
式中:α為全站儀測量的水平角度;β為攝像測量傾斜角度;λ為測量中全站儀水平位移量;R為測量中攝像鏡頭的正交矩陣。將公式(1)與公式(2)進行合并處理,可以得到一個針對攝影測量與工程測量的共線方程,方程表達式如下:

(3)

(4)
式中:I1~I3為空間正交系數;m1~m3為線性觀測值;s1~s3為旋轉聯合系數。根據上述計算公式,完成共線方程的構建。
1.2 基于攝影全站儀的無接觸測繪
在完成共線方程的構建后,對基于全站儀的無接觸測量方案進行設計,可將此過程中的兩者集成劃分為兩種方案,分別為直接連接方案、攝像機中CCD成像芯片與全站儀連接方案[3]。在實際測量時,根據測量任務需要,采用laval 54—5564型號攝影全站儀對其進行無接觸測繪。此型號設備具有100萬超清像素,在使用過程中,可直接將其與集成在全站儀中的望遠鏡進行對接,測量中設定其同步水平角度為α,垂直角度為β。
為了確保測量中的作業需求,將成像芯片與影像傳感器直接對接,可根據其中一臺攝像機的偏置寬角構成CCD相機,另一臺集成在望遠鏡成像系統中[4]。其中,后者應與望遠鏡進行同軸處理。在進行測量過程中的目標點匹配操作時,還可以同步實現對目標點周圍物體的測量。
1.3 數碼攝影機偏置量確定與校驗
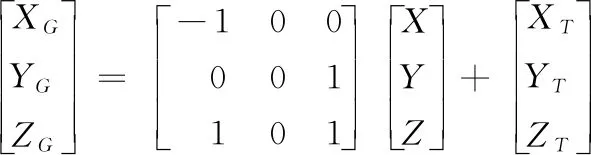
由于數碼攝影機與攝影全站儀的光學系統不在同一個軸結構上,在將兩種測量方法應用到相同測量任務當中時,需要對其偏置量進行確定。同時,為了確保最終得出的測量結果精度符合測量需要,還需要對偏置量進行校驗[5]。已知在全站儀當中包含三種坐標系,分別為地面坐標、全站儀坐標和攝影機坐標。根據數碼攝影機的測量習慣,將三個坐標均設置為固定的右手坐標系。在各個坐標系都不重疊的條件下,將其相互之間存在的差異作為數碼攝影機的偏置量,如圖2所示。
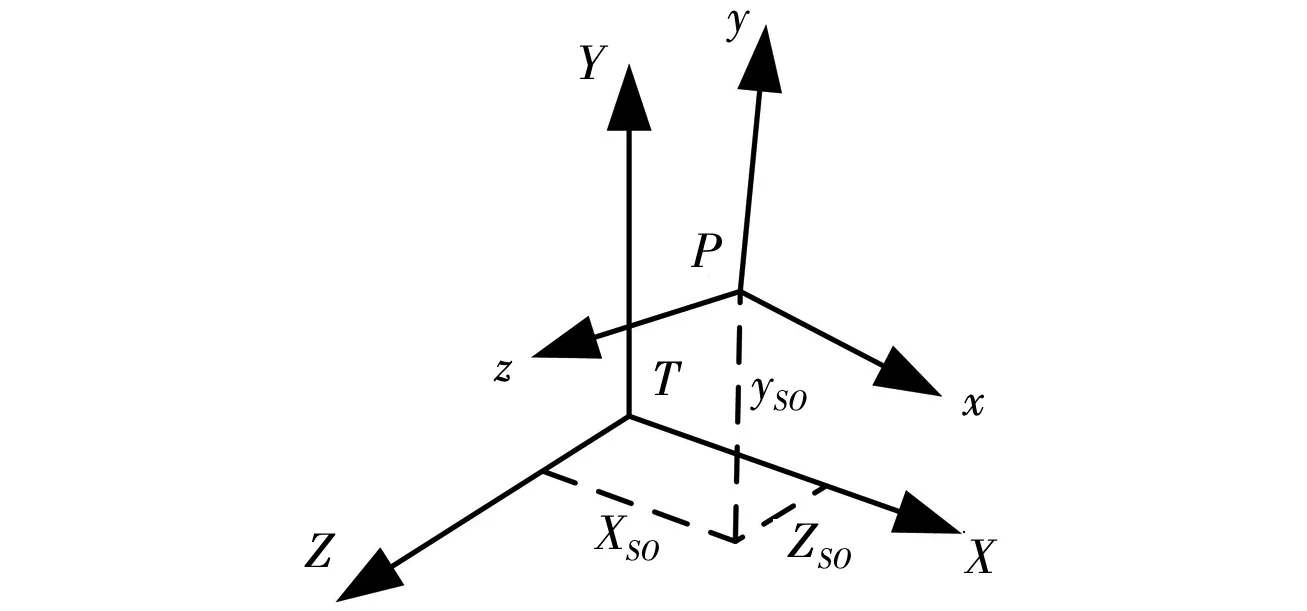
圖2 數碼攝影機偏置量off-set示意圖
圖2中,數碼攝影機偏置量為off-set:Xso,Yso,Zso。當將數碼攝影機安裝在全站儀上時,此時off-set數值為常數,利用該數值可以實現對偏置量的在線檢驗,以此確保數碼攝影機的測量位置準確,為后續測量提供高精度條件。
2 應用效果分析
2.1 實驗準備
根據上述設計的兩種測量任務的結合方案,將其代入到某工程建設項目當中,分別按照本文結合方案、單一攝影全站儀測量和單一數碼攝影機測量共三種測量方案,對該工程建設項目中的各個測量對象的參數進行獲取,通過比較三種測量方法與實際測量對象真實數值之間的誤差,實現對三種方案測量精度的對比和驗證。已知該工程建設項目為辦公樓建筑,分別在該辦公樓建筑上隨機選擇五個公共點作為測量目標,表1為五個公共點的真實空間坐標數值對照表。
表1 辦公樓建筑五個公共點真實空間坐標數值對照表
在表1中真實數據的基礎上,分別完成三種方案的測量,并將其各個公共點測量結果與表1中數據進行對比,按照如下公式,計算得出各個方向上的測量誤差值:
(5)
式中:ua、ub和uc分別為橫軸坐標、縱軸坐標和空間坐標上的測量誤差;a、b、c分別為公共點的真實空間坐標;a′、b′、c′分別為通過某一測量方案得出的測量結果空間坐標;n表示為測量次數。
再根據公式(6),計算得出最終測量方案的測量結果誤差值:
u=ua+ub+uc
(6)
式中:u為最終的測量誤差結果。同時,為了確保實驗結果的客觀性,實驗中所用的攝影全站儀和數碼攝影機均選擇相同型號,其中攝影全站儀選用TrimbleSX 10型號,該型號攝影全站儀的測角精度為0.5″,測距精度為棱鏡模式 標準 1 mm,自動水準補償器精度為0.5″ (0.15 mgon),測程為棱鏡模式單棱鏡 1 m。數碼攝影機選用OI405EOS 70D型號,該型號數碼攝影機的傳感器類型為LiveMOS。
2.2 應用結果記錄與分析
在完成實驗前的準備工作后,將上述計算結果以圖像的形式展現,并方便對其應用效果進行對比,得到如圖3所示的實驗結果。
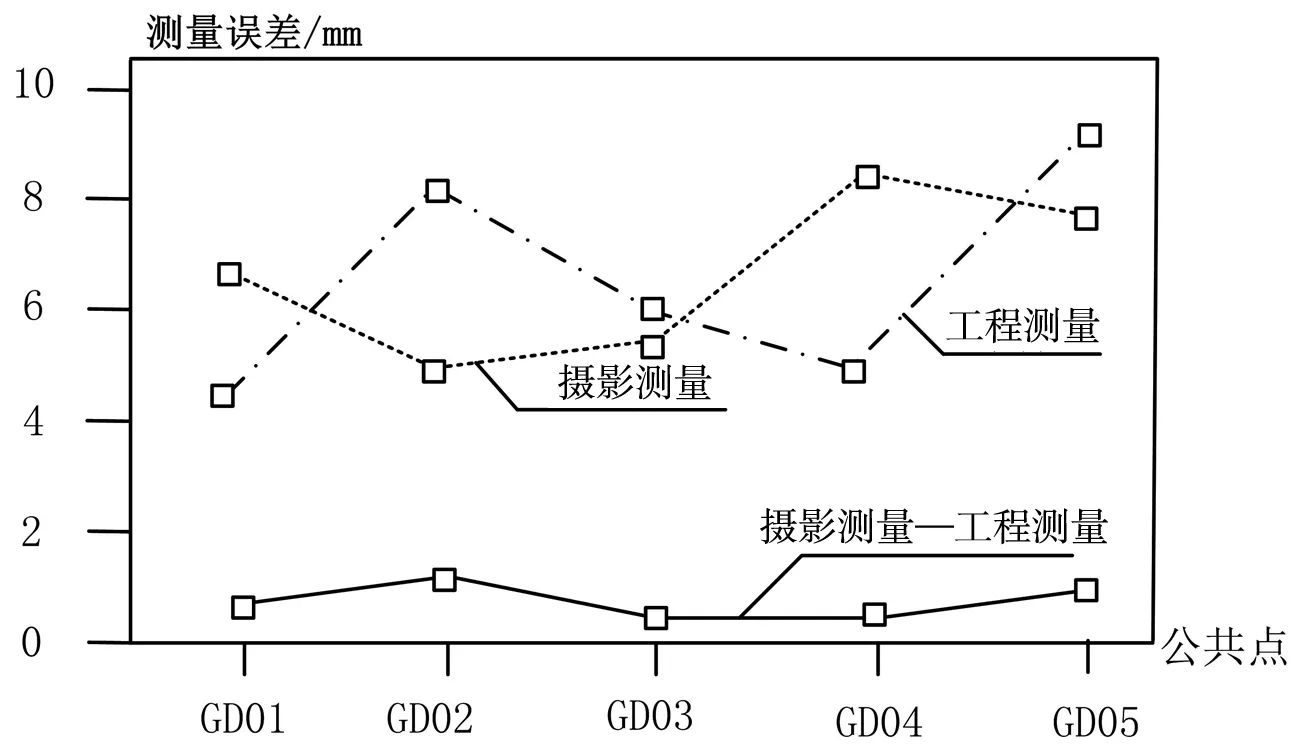
圖3 三種方案測量結果誤差對比
對圖3實驗結果做進一步對比可以得出,本文提出的結合方案在實際應用中針對各個公共點的測量誤差均小于2.0 mm,而單一采用攝影測量和單一采用工程測量的測量方法的測量誤差最大均超過了8.0 mm。因此,通過上述實驗能夠證明,本文提出的測量方案能夠有效降低對各個測點的測量誤差,從而提高最終測量結果的精度,可為后續工程建設與施工提供更加可靠的數據依據。
3 結束語
在完成對工程測量中結合方案的設計后,通過將此方案與傳統方案進行對比的方式,證明了本文提出的結合方案在實際應用中具有準確度更高的優勢。
兩者的融合在真正意義上實現了測量過程的無接觸作業,也不需要于測量前在現場布置較多的標志點。總之,相關此方面內容的研究,截至目前,仍屬于一個較為新興的研究領域,在一定程度上為工程測繪作業的實施開辟了新的研究領域。但要真正地將本文設計方案在市場內進行推廣,還需要在后期的研究中,深入分析測量領域的理論知識,包括如何使用全站儀進行標準校驗、如何將指定控制點中的三角測量延伸到控制片等。在后續的設計中,將針對此方面展開進一步的研究,以實現對本文設計方案的完善。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
太空探索(2016年6期)2016-07-10 12:09:06
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54
