
佛山地鐵車輛全自動運行模式下智能運維的探索
2022-04-09 19:59:32黃健
機電工程技術 2022年2期
黃健




摘要:通過對全自動運行、智能運維等相關規范、文獻的研讀,結合相關技術行業內應用情況及發展情況,分析佛山地鐵車輛專業全自動運行模式的主要配置,并由此形成智能運維系統配置建議。此外,還總結了車輛全自動運行及智能運維的聯系,展望了車輛全自動運行、智能運維發展方向及需提前謀劃的事項。主要結論為:創新性地結合車輛全自動運行模式功能要求,在分析車輛全自動運行主要配置的同時,有針對性地分4大模塊提出了車輛智能運維設備配置建議,以實現關鍵設備的實時狀態監測、故障預測、故障預警、應急處置等,進一步提高了車輛專業全自動運行模式下的安全性、可靠性,總結了兩者相輔相成、協同降低維護成本的關系。
關鍵詞:佛山地鐵;車輛;全自動運行;智能運維
中圖分類號:U231.6
文獻標志碼:A
文章編號:1009-9492f 2022) 02-0177-05
0 引言
近年來,隨著大數據、數據中臺、云計算、邊緣計算、CBTC等技術發展,地鐵行業全白動運行及車輛智能運維相關技術發展迅猛。軌道交通全自動運行( FullyAutomatic Operation,FAO)是基于現代計算機、通信、控制和系統集成等技術實現列車運行全過程自動化的新一代軌道交通控制系統,是進一步提升現有基于通信的列車運行控制 ( Communication-based Train Control,CBTC)系統的安全性和效率的國際公認發展方向[1-3]。預計到2023年我國將有19座城市擁有40條全白動運行線路,共計1 200 km,全自動運行模式將逐漸成為后續地鐵建設的主流。車輛智能運維研究也是近年的研究熱點,各大地鐵公司均有不同程度應用相關設備,相關設備技術可靠性、監測準確性逐漸提升,并逐步形成相關行業規范。
全自動運行技術及智能運維作為行業發展趨勢,兩者相輔相成,全自動運行技術進一步為智能運維設備的應用提供了平臺,智能運維則是全自動運行技術可靠性、安全性等方面的重要補充。全自動運行技術與設備智能運維技術具有相同的技術特點,即均體現技術的智能化、自動化、信息化,探討全自動運行模式下的智能運維具有重要意義[4]。目前國內對全自動運行車輛主要配置、車輛智能運維均有不少研究,但兩者統籌考慮的相關研究還比較少。本文以佛山地鐵新一輪規劃建設為例,結合車輛全白動運行、車輛智能運維的特點及發展趨勢,通過對相關規范、文獻的研讀,了解相關技術行業內應用情況及發展情況,討論分析在全自動運行模式下車輛智能運維的定位及功能需求,以使車輛智能運維與全自動運行模式更好地相結合,以期在新線規劃、籌備階段更好地統籌考慮車輛智能運維架構及配置。
1 城市軌道交通傳統運行模式及設備運維模式分析
根據國際標準IEC 62290[5]的定義,軌道交通自動化等級共分為5個等級,分別是COAO、COAI、COA2、COA3、GOA4。自動化等級的定義是基于軌道交通列車運行中所完成規定功能對運營人員和系統的責任分配。其中COAO、COA1為非自動運行模式;COA2為半自動運行;COA3為有人值守下列車自動運行(DTO);COA4為無人值守下的列車自動運行(UTO)。
傳統的城市軌道交通應用最廣泛的運營模式為ATO駕駛模式,即COA2等級。在該模式下,司機在駕駛室內對電客車狀態及線路軌道情況進行監控,并進行必要的故障處理、應急處置。傳統的城市軌道交通運行模式在運營組織靈活性、運營能力、運營成本、司機勞動強度等方面均存在不足。傳統的城市軌道交通車輛運維模式采用的是計劃性檢修加故障維修的方法,是基于檢修規程周期性地開展車輛檢修工作,列車狀態及故障監控、報警是利用列車列控系統實施的。傳統的城市軌道交通車輛運維模式缺少全生命周期跟蹤及關鍵部件實時狀態監控、預警等功能,因此運營設備易出現過修、欠修及應急事件等狀況。同時,由于設檢修主要是由作業人員按照檢修規程進行主動檢測,受作業人員身體和精神狀態的影響,也易發生漏檢、錯檢等情況[6]。
2 佛山地鐵車輛全自動運行主要配置分析
根據國際標準IEC62267[7],不同自動化等級對列車運行的基本功能需求有所差異。如表1所示,IEC62267對自動運行的基本功能主要包括保證列車安全運行、駕駛列車、監控軌道、監控乘客上下車、列車運行、緊急情況的檢測與處理等6部分。保證列車安全運行、駕駛列車功能在COA2等級下已由ATP、ATO實現,下面將重點討論監控軌道、監控乘客上下車、列車運行、緊急情況的檢測與處理等4種功能需求下車輛的關鍵技術。
2.1 監控軌道
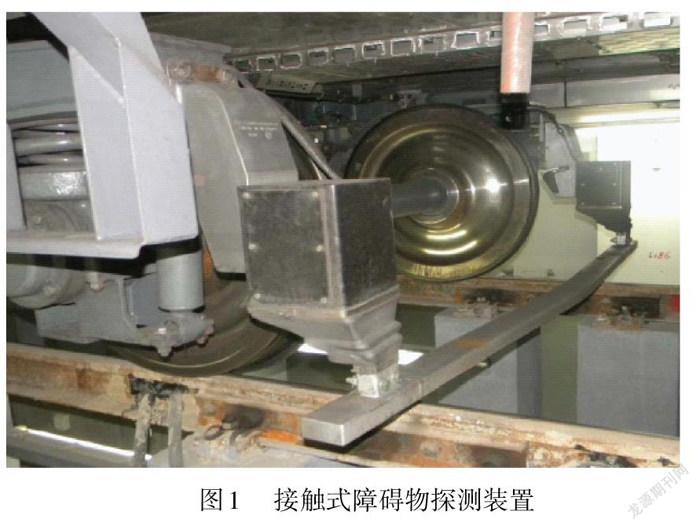
車輛前端和末尾配備障礙物探測裝置,該配置為全自動運行車輛標準配置。目前該裝置主流采用被動式、接觸式系統,通過壓力敏感裝置探測列車兩端的障礙物,如圖1所示。當探測到障礙物時,列車會立即觸發緊急制動,同時信息將實時發送至OCC,由車輛調度采取處置措施。
但該接觸式系統仍存在較大局限性,在監控范圍、監控及時性等方面仍不能完全替代人工,因此目前集成雷達、激光、紅外等綜合探測手段的非接觸式系統仍在持續開發,各家地鐵也在積極調研非接觸式系統發展情況,并在設計階段充分考慮、預留非接觸式系統的條件。
2.2 監控乘客上下車
該功能在車輛專業主要考慮車門故障情況的應對,主要涉及車門狀態丟失、車門故障隔離站臺門、再關車門控制3種場景。
2.2.1 車門狀態丟失
列車運行在線路任意位置,車輛采集到列車車門狀態丟失時,車載VOBC將狀態丟失信息發送至OCC,并聯動VMS。場景情況為:(1)在區間或進站過程中檢測到列車車門狀態丟失,列車繼續運行進站精確停車,列車在站臺停穩后,打開車門和站臺門后不關閉,待車輛調度、乘客調度根據故障信息、CCTV監控情況或與車站人員溝通核實情況后后再執行后續處理;(2)列車在站臺準備啟動出站時,采集到車門狀態丟失時,車載TCMS立即實施緊急制動。
2.2.2車門/站臺門故障對位隔離
即車門與站臺門故障對位鎖定功能。當列車個別/多個車門故障隔離后,本列車停站時對應站臺門應能保持鎖閉不參與停站的開、關門作業。相應地,當列車車門/屏蔽門故障隔離或切除后,本列車繼續運行至前方車站停站時對應的站臺門應白動隔離,保持鎖閉不參與列車停站的開、關門作業。同時,其他站臺門的開、關作業不受影響。
場景情況為:(1)當車門故障并隔離或切除后,聯動車載PIS,觸發故障車門上方的顯示屏,提示此門不打開,紅色指示燈亮起,并對故障車門進行列車廣播;(2)列車TCMS將車門故障信息發送給車載VOBC,VOBC反饋到中心ATS系統,并在行調、車輛調ATS工作站顯示車門故障報警信息;(3)列車進出站時車載VOBC與CI聯動,確保對位隔離功能的實現。如圖2所示。
2.2.3 再關車門控制
當車門因夾人夾物或其他因素導致開閉車門3次后仍不能關閉時,列車通過車輛TCMS向車載VOBC發送進入防夾狀態信息,并聯動VMS,車門保持打開不關閉,OCC遠程通過站臺、車內攝像頭確認或聯系車站T作人員現場確認安全后,遠程再執行關閉車門指令或由車站人員按壓站臺上的強制關門按鈕進行關門。
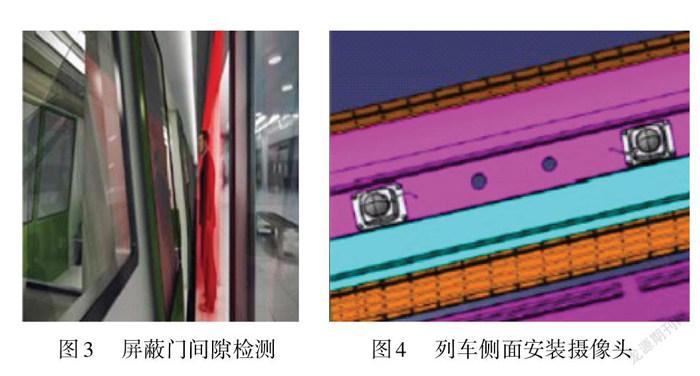
此外,在監控乘客上下車功能上,有的城市應用屏蔽門障礙物檢測系統,該系統主要采用紅外、雷達或攝像頭技術,如圖3所示;也有地鐵在列車側面安裝一定數量攝像頭用于監視車門和站臺門之間異物、人員的情況,攝像頭具備圖像識別功能,如圖4所示。
2.3 列車運行
該功能在車輛專業主要考慮以下3點。
(1)車輛應支持遠程及本地休眠喚醒功能。
(2)列車在喚醒時,應與信號配合共同完成上電自 檢、靜態測試,并宜完成動態測試。
(3)車輛休眠時,應具備蓄電池狀態上傳到控制中心功能;當發生蓄電池欠壓,應向OCC報警提示。列車喚醒模塊所需的電源應保持24h不間斷供電,列車連續休眠一定天數后,仍能確保喚醒列車,并保證一定的額外冗余容量。
2.4 緊急情況的檢測與處理
該功能在車輛專業主要考慮以下7點。
(1)配備脫軌檢測裝置,該裝置通常與障礙物檢測合設。
(2)每輛車客室內配置客室緊急操作、呼叫裝置,如圖5-6所示,當客室內發生火災等特殊情況時,乘客可利用該裝置觸發報警,TCMS處置報警信息且上傳到控制中心,同時聯動車載VMS并上傳到OCC,乘客調度可遠程通過與乘客溝通。
(3)車輛實時監督車輛相關設備的工作狀態,對車輛制動系統故障、障礙物檢測激活、客室緊急手柄激活、車門狀態丟失、車輛火災等影響列車運行安全的情況進行防護,TCMS處置事件信息并上傳到OCC;系統自動處理或由控制中心遠程人工處理,并聯動車載VMS、車載PIS系統,并向乘客廣播。
(4)對電氣柜門、司機臺蓋板、緊急疏散門蓋板、滅火器等可由列車TCMS監控,當車輛在運行中電氣柜門或蓋板打開時,向TCMS和OCC傳輸報警,聯動VMS,并在司機臺及OCC的屏上顯示。
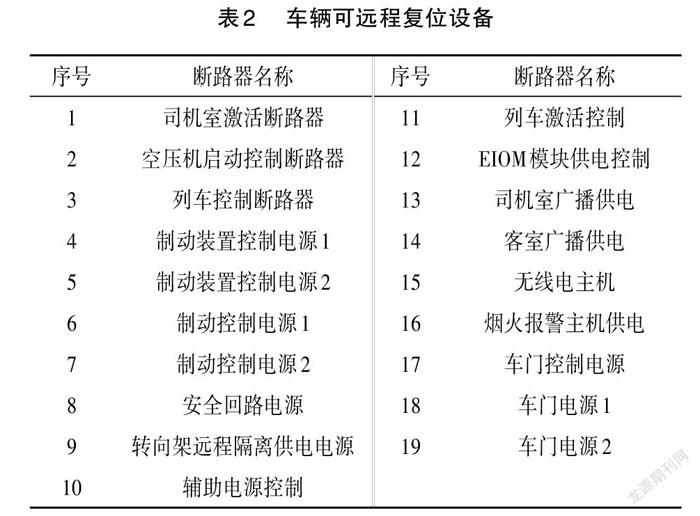
(5)支持遠程復位設備、遠程旁路故障功能;根據軌交協發布的《中國城市軌道交通全自動運行系統技術指南(試行)》建議可遠程復位設備如表2所示。
(6)具備轉向架制動遠程切除、停放制動遠程操作功能,并設置安全措施,保證全列車緊急制動滿足可保證的緊急制動率。
(7)具備受流裝置遠程操作功能,可實現全列或分組進行受流裝置的操作,TCMS處置相關故障信息且上傳到OCC。
3 佛山地鐵車輛智能運維主要配置分析
與傳統運維模式相比,智能運維系統在保障城市軌道交通安全可靠運營的基礎上能夠最大限度地降低運維成本,符合環境可持續發展的戰略要求[8]。國內城市軌道交通企業在探索智能化維保策略的過程中已取得一些成果(如優化修程、拉長計劃性維修的時間間隔),但大多數公司仍以試點測試為主,尚未形成批量化的實際應用案例[9]。佛山地鐵考慮因應全自動運行模式特點及需要,批量化應用智能運維。
佛山地鐵車輛智能運維配置主要基于兩點考慮:(1)針對上述全自動基本功能,通過實時監測重點設備狀態、長期大數據統計分析,實現故障預測、故障提前介入,形成專家庫系統等目標,以提高設備可靠性、安全性;(2)結合全自動運行,通過對設備全壽命周期的監測,部分檢查及測量工作的機器補充、替代等方式,降低運維成本。
佛山地鐵車輛智能運維體系如圖7所示,主要考慮如下。
(1)在途車輛綜合檢測系統。主要包括:①各子系統的檢測,主要基于系統原有診斷功能,部分加裝傳感器,集成在運維平臺對其關鍵數據進行統計分析;②走行部系統、弓網監測系統、蓄電池檢測系統,為安全重要設備監測系統,是對全自動運行的重要補充,且相關監測系統在行業內應用較廣泛、成熟,建議全自動運行線路列車可全覆蓋配置;③數據集成采集系統,功能為對各子系統監測數據進行集成采集,并進行故障前期診斷。
(2)軌旁車輛綜合檢測系統。主要包括:①360°車輛外觀檢測、輪對尺寸檢測、踏面缺陷動態圖像檢測、巡檢機器人(試點)可作為人工作業的補充,是降低運維成本的主要手段;②車輛運行品質在線檢測、車下設備溫度檢測、受電弓檢測、車輪探傷等設備,對列車運行狀態進行監測,保障列車動力學性能、車下設備溫度、受電弓、輪對狀態正常。其中,巡檢機器人目前仍處摸索階段,技術仍不成熟,可作為試點,并在設計階段預留供電條件。
(3)車輛檢修管理信息系統。與地鐵公司自身生產運作系統管理系統應做好功能區分,生產運作系統管理系統主要側重于物資、資產、工單、工器具,并兼有數據庫功能;車輛檢修管理信息系統則偏重于車輛自身個性化需求,如洗車安排、受電弓檢查安排、普查整改模塊、技術通知單模塊、架大修模塊等。
(4)地面智能運維平臺。通過對在途車輛綜合檢測系統、軌旁車輛綜合檢測系統、車輛檢修管理信息系統輸入的數據進一步實現車輛狀態監控、故障報警、應急處置、故障診斷、故障預警、故障預測、運維決策支持、RAMS分析、LCC分析等功能。地面智能運維平臺整合并使各子檢測系統數據實現互聯,并利用大數據、數據中臺等手段進行數據挖掘,從而實現車輛狀態及數據的統一展示、分析、決策。智能運維不能單一地追求高技術含量,還要兼顧先進性和成熟度,以信息化為基礎,強化頂層設計,梳理系統架構,合理搭建系統平臺[10]。此外,在其他全自動運行線路,也有試點構架失穩監測、車體平穩性監控、限界巡檢等監測設備。
4 結束語
佛山地鐵在車輛全白動運行、智能運維方面進行了積極探索,結合相關技術資料分析了車輛全自動運行模式下的主要配置,并以此作為主要依據,即結合全自動運行需求、特點,提出了車輛智能運維設備配置的建議。在項目的規劃階段創新統籌考慮車輛全白動運行與智能運維的關系,以此作為相關設備的配置依據。通過全自動運行及智能運維系統的建設,提高車輛的整體安全性、可靠性,實現車輛檢修的智能化、車輛全生命周期的管理,降低維護成本。未來佛山地鐵將緊跟相關技術發展情況,進一步優化車輛相關設備配置,優化車輛維修體系、管理體系。
綜上,總結及展望如下。
(1)全自動運行模式下智能運維系統相輔相成,密不可分。除全自動運行標配的障礙物檢測系統外,在行業規范內,走行部在線監測、受電弓在線監測、蓄電池在線監測等設備也被建議在全白動運行線路的車輛上配置。可以預見,隨著設備的成熟,相關設備在未來將會進一步納入全白動運行標配范圍。
(2)密切關注非接觸式障礙物檢測系統、車車通信、WiFi6、限界巡檢、數據中臺等技術發展。全自動運行及智能運維作為行業發展方向,隨著基礎技術的發展,相關技術必有更長遠的發展,因此須緊跟新技術發展,進一步完善相關設備配置體系。
(3)結合既有線路相關智能運維設備安裝、調試、運用情況,為全面推廣相關重點在線監測做好準備。通過全面引入在線監測分析系統,對轉向架、受電弓、牽引輔助、車門等影響行車的關鍵設備進行全生命周期管理,提升運營設備安全性、可靠性。
(4)因應全自動運行及智能運維帶來的檢修模式、人員體系變化,需及早謀劃。在全自動運行及智能運維模式下,對檢修人員的傳統檢修能力要求有所弱化,但對智能設備應用維護、軟件數據分析等要求有所提高。此外,檢修人員還需承擔部分正線保障職能。
(5)基于車輛智能運維系統進行設備狀態修的探索。隨著設備智能運維技術的發展,在大數據中心的支持下,可對設備運行狀態進行實時監控、故障預測與設備劣化趨勢判斷,進而實現設備在線實時故障診斷、運用狀態全面分析、劣化設備提前預警[11]。
(6)數據云平臺的應用。佛山地鐵云平臺建設除管理領域外,也規劃涉及生產領域、智能運維領域,旨在解決各專業數據孤島問題。但在如何使數據相互聯動、共同分析決策等方面仍需進一步研究。
(7)結合智能運維設備,提前謀劃全自動運行場景設計。場景文件既需要體現運營的理念與需求,又需要反映出系統中的各設備功能和崗位設置的依據以及系統之間聯動的邏輯[12]。全自動運行場景除全自動運行行業規范常規的40多個場景外,各大地鐵公司因應自身公司架構、人員、管理體系等不同,細化、補充了部分場景,因此有必要結合實際情況,充分考慮所配置的智能運維設備的定位、作用,對場景進行優化、完善。
參考文獻:
[1]郜春海,王偉,李凱,等.全自動運行系統發展趨勢及建議[J].都市快軌交通,2018(1):51-57.
[2]王偉.面向互聯互通的全自動運行系統[J].鐵路技術創新,2016(4):56-60.
[3]閏宏偉,燕飛,城市軌道交通全自動運行系統及安全需求[J].都市快軌交通。2017,30(3):50-55.
[4]張黎璋.東莞地鐵設備智能運維系統分析[J].城市軌道交通研究,2019(9):160-167.
[5] IEC-62290-1-2006. Urban Cuided Transport Management andCommand/control Systems Part l:System Principles and Fun-da-mental Concepts[S].
[6]李崗.地鐵車輛智能檢修可行性研究[J].山東工業技術,2018(9):60.
[7] IEC-62267: 2009. Automated Urban Cuided Transport(AUGDSafetyRequirements[S].
[8]劉述芳.城市軌道交通關鍵設備智能運維系統初步建構[J].設備管理與維修,2018(增刊1):22.
[9]劉丙林,朱佳,李翔宇.城市軌道交通車輛智能運維系統探索與研究[J].現代城市軌道交通,2019(6):16-21.
[10]胡佳琦,上海市軌道交通車輛智能運維系統研究與應用[J].現代城市軌道交通,2019 (7): 5-9.
[11]陳建.基于故障預測與健康管理的高鐵信號設備維護技術研究[J]中國鐵路,2015(3): 16.
[12]譚文舉,楊衛峰,廖云,等.城市軌道交通全自動運行系統設計及場景分析[J].機車電傳動。2019(4):112-115.
