自動駕駛車流對區域規劃路網密度的影響分析
2022-04-13 11:51:30李子輝李美玲冉晉朱香敏
公路與汽運 2022年2期
關鍵詞:區域
李子輝, 李美玲, 冉晉, 朱香敏
(1.山東建筑大學 山東高校重點實驗室道路與交通工程實驗室, 山東 濟南 250101;2.山東省交通科學研究院, 山東 濟南 250102;3.山東高速股份有限公司, 山東 濟南 250101)
自動駕駛汽車與人工駕駛汽車混合行駛,若不考慮自動駕駛汽車的影響,不僅會對交通安全造成威脅,還會帶來交通擁堵、能源及環境等問題。Ioannou P.對自動駕駛車輛、半自動駕駛車輛和手動駕駛車輛對道路交通安全和效率的影響進行了分析;Bose A.等分析了自動駕駛、手動駕駛車輛行駛在同一車道時對交通流特性及環境的影響;馬麗娜運用元胞自動機對不同交通條件下無人駕駛、手動駕駛交通流特點進行了分析;陳廣宇等基于元胞自動機交通流模型構建人工駕駛汽車及配有自動巡航系統(ACC)車輛的運動規則,研究混合ACC車輛與人工駕駛汽車的交通流模型;陳麗燁對自動駕駛汽車規模化運營后城市道路交通規劃與基礎設施設計面臨的問題和挑戰進行了分析。
在路網規劃階段,表征交通供給的主要有路網形式、路網密度和路網級配,其中路網密度是最重要的量化指標。在進行區域路網規劃時,可將自動駕駛車流的影響轉化為自動駕駛車流的加入對路網密度的影響。該文基于供需平衡思想構建考慮自動駕駛車流的路網密度模型,針對具體場景進行參數標定,分析自動駕駛車流對區域規劃路網密度的影響。
1 模型構建
自動駕駛汽車的運行機理與人工駕駛汽車存在較大差異,主要表現在環境感知、規劃決策和應急避險等方面(見表1)。

表1 自動駕駛與人工駕駛汽車運行機理的差異
1.1 模型引入
確定合理路網規劃密度的方法有經驗類比法、指標計算法、供需平衡法和交通仿真法。這里選用供需平衡法,參考文獻[10],考慮土地資源利用、城市規模及城市人口標準、工作崗位經營規模和車輛擁有量,構建以交通供需平衡、道路用地面積控制、干道網密度約束、支路密度約束、路網等級結構和路網各等級周轉量為約束條件,以路網周轉量最大及道路建設投資最少為目標的道路網密度模型。為提高城市交通服務水平,在該模型的基礎上加入自動駕駛車流,改變部分參數取值,同時考慮過境交通比例,構建考慮自動駕駛車流的路網密度模型。
1.2 目標函數
路網密度模型中的目標函數是使所研究區域內部各級道路的交通供應總量最大,即道路網各等級道路周轉量總和最大,表達式如下:
(1)
式中:V為道路網總周轉量(pcu·km/h);Qi為第i類道路的周轉量(pcu·km/h);i表示城市道路種類,分別為快速路、主干路、次干路和支路;Ci為第i類道路單條車道的可能通行能力(pcu/h);αi為第i類道路的平均飽和度;βi為第i類道路的交叉口折減系數;γi為第i類道路的車道綜合折減系數;Ni為第i類道路的平均機動車車道數;Li為第i類道路的里程(km)。
1.3 約束條件
道路交通供給應高于或等于城市交通需求,其平衡條件為:
(2)
式中:D1為區域內交通需求(pcu·km/h);D2為過境交通需求(pcu·km/h)。
區域路網規劃中還需考慮城市道路面積控制、合理干路網密度和各級道路合理級配等條件,參考文獻[7],依據研究區域實際位置確定各種約束條件:
(3)
式中:di為各等級道路寬度(km);Li為各等級道路長度(km);S為研究區域面積(km2);Amax為區域道路面積率上限值(%);L2、L3分別為研究區域內主干路、次干路長度(km);εg為合理干路網密度(km/km2);L4為研究區域內支路長度(km);εz為合理支路網密度(km/km2)。
2 自動駕駛車流對模型參數的影響分析
2.1 可能通行能力
可能通行能力是指在實際道路和交通條件下,1條車道或1條道路某一路段的通行能力。在交通流中未加入自動駕駛車流(自動駕駛車流占比=0)時,根據CJJ 37—2012《城市道路工程設計規范》,單條車道的可能通行能力見表2。加入自動駕駛車流后,在單車道通行能力影響因素中,交通條件(指交通特征,包括交通流的交通組成、交通量及車道分布、方向分布等)發生變化。不同自動駕駛車輛占比下單條車道的可能通行能力Ci見表2。自動駕駛車輛占比為20%時對通行能力影響不大,不予考慮。
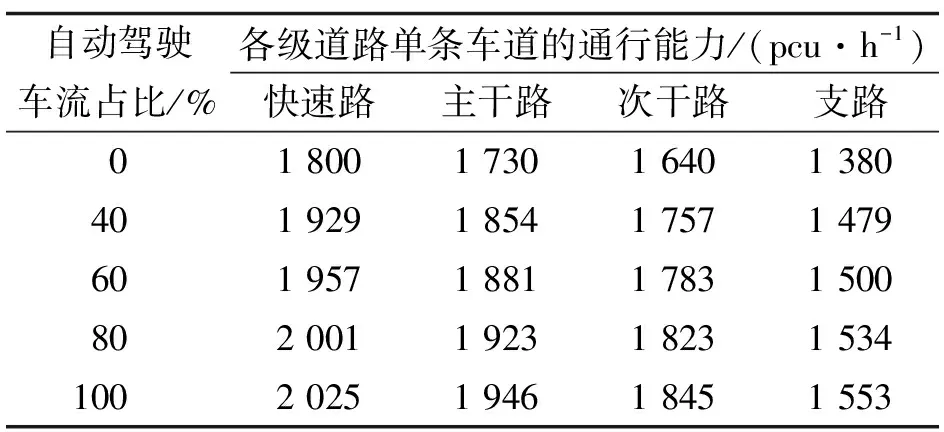
表2 單條車道的可能通行能力
2.2 出行方式占比
出行方式占比通過研究區域所在城市的出行調查獲得,若為新規劃區域,則根據該區域的交通發展模式確定。
根據濟南市2018年居民出行調查結果,公交車、小汽車、出租車的出行占比分別為21.16%、 15.74%、1.08%。將自動駕駛車輛在私家車和出租車中所占比例從0~100%每隔20%取一個值,由于出行方式占比與各級道路通行能力存在聯系,不考慮自動駕駛車輛占比20%時各類交通方式的劃分,只研究0、40%、60%、80%、100%自動駕駛車輛占比下的情況(見表3)。
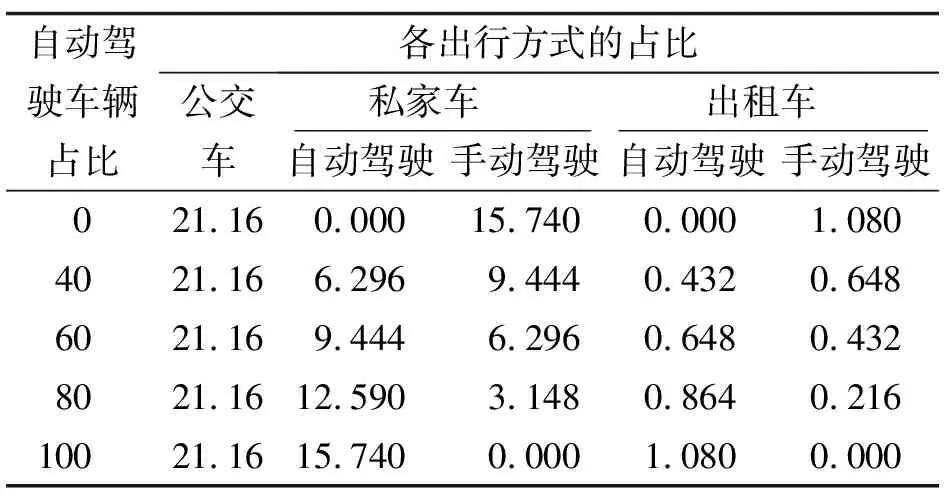
表3 不同自動駕駛車輛占比下各出行方式的占比 %
2.3 平均載客數
區域內的主要交通工具有自動駕駛汽車、非機動車、公交車、私家車、出租車和單位班車,根據CJJ 37—2012《城市道路工程設計規范》中換算系數參考值,假定自動駕駛車輛作為私家車和出租車使用,公交車、私家車(自動駕駛)、私家車(手動駕駛)、出租車(自動駕駛)、出租車(手動駕駛) 的換算系數為3∶1∶1∶1∶1。
車型的平均載客數通過所在城市交通調查獲得,公交車、私家車、出租車的平均載客數分別為30、1.67、2.2 人/車,平均載客數取私家車2人/車、出租車2 人/車。
3 研究場景構建與參數標定
選取濟南市某區域作為研究場景標定計算參數,分析加入自動駕駛車流后合理道路網密度與等級結構。
3.1 場景簡介
圖1為濟南市某區域地塊原型。選取1 km2作為研究范圍,區域內采用方格網狀布局,地塊功能分為商業金融、商務辦公、行政服務及配套的居住和公共設施,主干路布置在區域外圍,次干路布置在區域中心和外圍,支路布置在區域內部。抽象處理后得到的高密度開發布局形式見圖2。

圖1 濟南市某區域用地原型
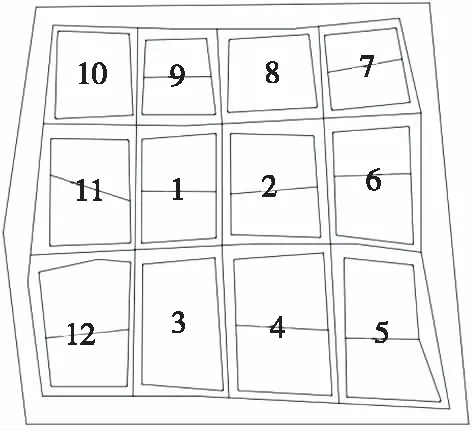
1~12為區域編號
3.2 研究場景參數標定
研究場景參數分為路網密度原模型中的參數,加入自動駕駛車流后改變的3個參數,分別為自動駕駛車輛平均載客數、不同自動駕駛車輛占比下出行方式占比和道路通行能力作用下部分參數取值發生的變化。針對該算例,各可變參數的初始值如下:道路面積率上限值Amax取25%;主干路、次干路、支路的寬度分別為40、20、17 m;干路網密度不小于3 km/km2;支路網密度不小于6 km/km2;各出行方式的占比見表3;研究區域范圍為1 km2,各車型平均出行距離約為0.6 km。
運用考慮自動駕駛車流的路網密度模型計算高密度開發區域的合理路網密度。首先計算區域交通出行總量,結果見表4;然后以自動駕駛車流占比為40%時通行能力為例,將所標定的參數帶入模型進行計算,得到合理路網密度與等級結構。
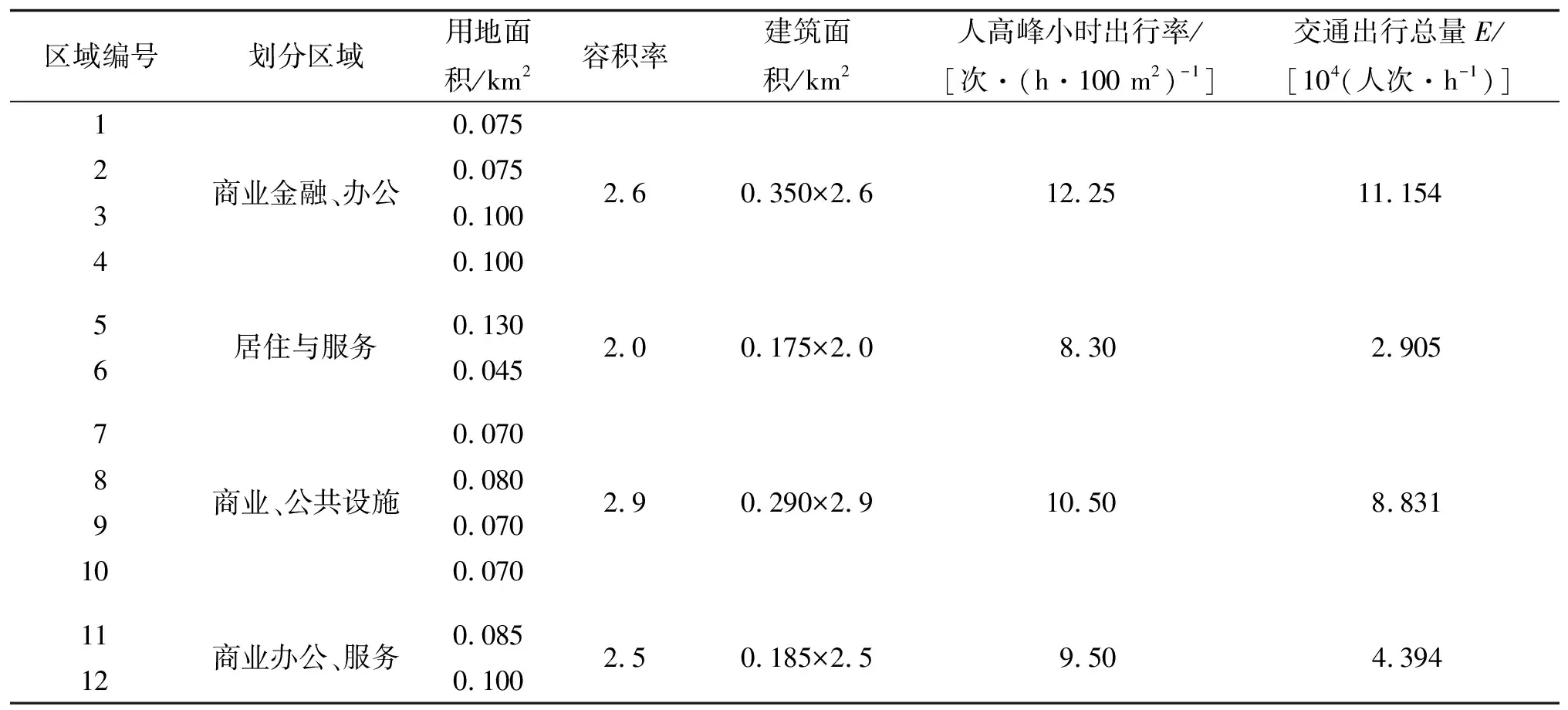
表4 各功能區域交通需求計算結果
研究區域的出行總量E=27.284×104人次/h,該區域為高密度、高強度開發的商務、金融服務區,在高峰小時會吸引大量交通流,區域內道路主要是服務于出行起終點為商務區的交通量,該模型計算時只考慮區域內交通,不考慮跨境交通,即D=D1。將上述參數代入式(1),得到該區域的交通需求總量D=66 725 pcu·km/h。路網密度模型的目標函數及約束條件為:
maxV=3 274.54L2+1 288.06L3+463.68L4
利用MATLAB工具箱里的linprog函數對模型進行求解,結果見表5。
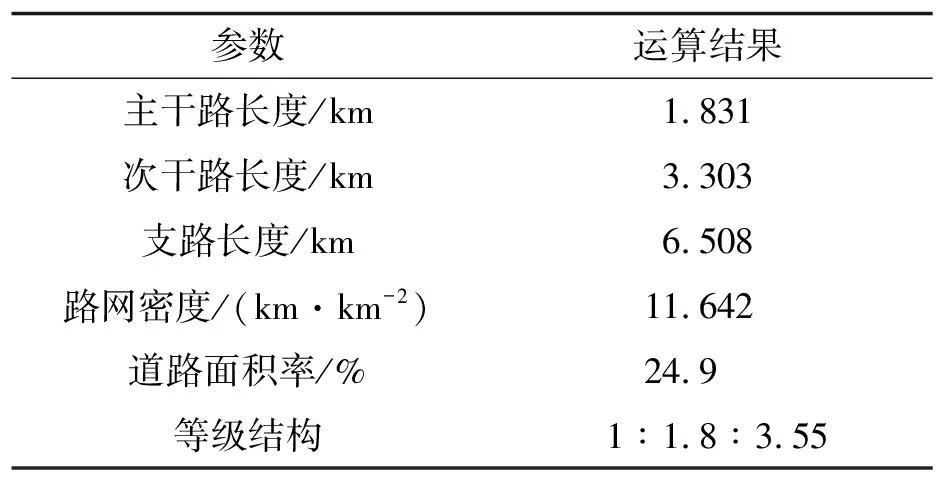
表5 路網密度模型的運算結果
4 參數改變時路網密度變化規律分析
根據模型的初值運算結果,分析路網密度對自動駕駛車輛平均載客數、不同自動駕駛車輛占比下出行方式占比和道路通行能力3個參數變化的敏感性。在各級道路服務水平下,道路通行能力隨著自動駕駛車輛出行方式占比的變化而改變,可把它們放在一起考慮。以自動駕駛車輛平均載客數作為第一組參數,自動駕駛車輛出行方式占比和各級道路通行能力作為第二組參數,分別固定這2組參數,探究另一組參數變化時路網密度的變化規律。
4.1 不同自動駕駛車輛出行方式占比和道路通行能力時路網密度的變化
固定自動駕駛車輛平均載客數,分析自動駕駛車輛不同出行方式占比和道路通行能力對路網密度的影響。公交車、私家車(自動駕駛)、私家車(手動駕駛)、出租車(自動駕駛)、出租車(手動駕駛) 的平均載客數分別取30、1.17、1.67、1.7、2.2人/車,即取私家車(自動駕駛)1人/車、私家車(手動駕駛)2人/車、出租車2人/車,不同自動駕駛車輛占比下各級道路通行能力和各出行方式占比的變化分別見表3、表2,模型運算結果見表6。
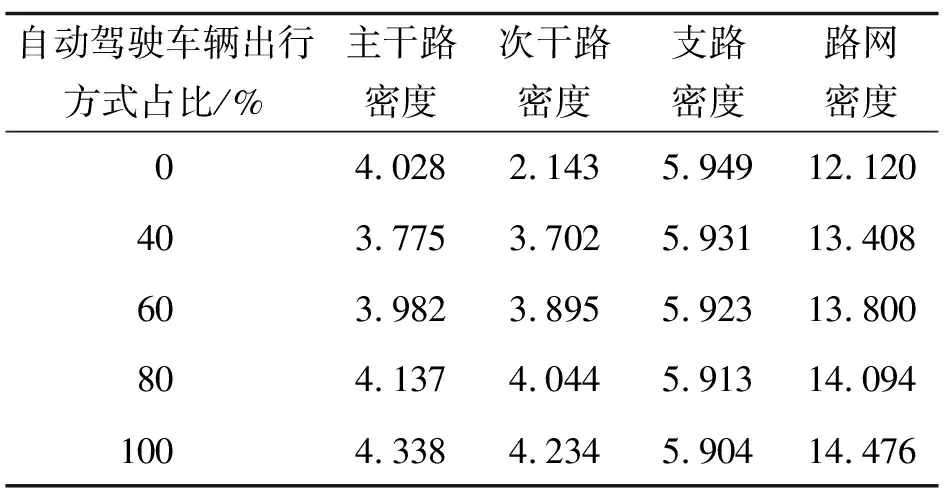
表6 不同自動駕駛車輛出行方式占比下 各級道路和路網密度 km/km2
由表6可知:在自動駕駛車輛平均載客數不變的情況下,隨著自動駕駛車輛出行方式占比和各級道路通行能力的增大,次干路密度增大,主干路和支路密度基本不變,路網密度呈遞增趨勢。
4.2 不同自動駕駛車輛平均載客數時路網密度的變化
固定自動駕駛車輛出行方式占比和各級道路通行能力,分析不同自動駕駛車輛平均載客數對路網密度的影響,探究自動駕駛車輛平均載客數如何取值更有利于區域路網規劃和城市發展。
由于不確定未來自動駕駛車輛的規格及政府會采取何種管理政策,對平均載客數設定以下3種情況:工況1為自動駕駛車輛平均載客數小于手動駕駛車輛平均載客數;工況2為自動駕駛車輛平均載客數與手動駕駛車輛平均載客數相同;工況3為自動駕駛車輛平均載客數大于手動駕駛車輛平均載客數。
固定自動駕駛車輛出行方式占比為40%時各類車輛出行占比和各級道路通行能力及服務水平,分析自動駕駛車輛平均載客數發生變化時路網密度,結果見表7。
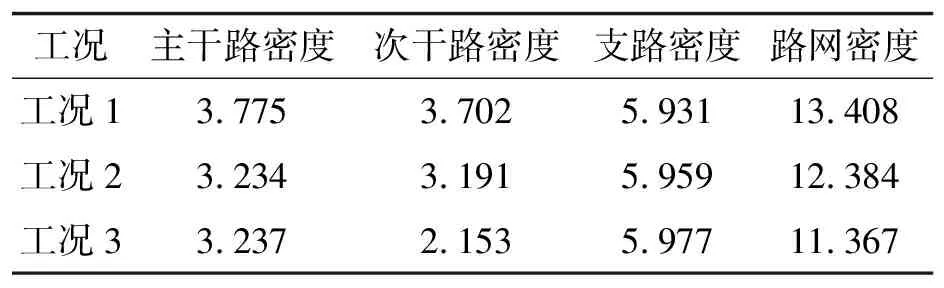
表7 不同自動駕駛車輛平均載客數下各級道路和路網密度 km/km2
由表7可知:在自動駕駛車輛出行方式占比和各級道路通行能力不變、各級道路交通服務水平一致的條件下,隨著自動駕駛車輛平均載客數的增大,次干路密度減小,主干路和支路網密度基本不變,路網密度呈遞減趨勢。
5 結論
(1) 影響區域路網密度的主要參數為自動駕駛車輛平均載客數、自動駕駛車輛出行方式占比和道路通行能力。
(2) 在自動駕駛車輛平均載客數不變的情況下,隨著自動駕駛車輛出行方式占比和各級道路通行能力的增大,次干路密度增大,主干路和支路密度基本不變,路網密度呈遞增趨勢。
(3) 在自動駕駛車輛出行方式占比和各級道路通行能力不變、道路交通服務水平一致的條件下,隨著自動駕駛車輛平均載客數的增大,次干路密度減小,主干路和支路密度基本不變,路網密度呈遞減趨勢。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
