基于無人機多光譜影像的土地利用分類方法研究
2022-04-19 13:33:00孫玉琳
新疆農機化 2022年2期
孫玉琳,黃 宇,2※,李 偉,張 卓
(1.無錫譜視界科技有限公司,江蘇無錫 214142;2.南京農業大學農業高光譜技術創新實驗室)
0 引言
土地利用變化是全球變化研究的重要因素,是可持續發展研究的熱點[1]。土地利用分類是了解土地覆蓋類型,進一步研究農作物產量預估、樹種分類識別[2]、水體變化監測的基礎。由人類活動造成的土地利用變化是區域乃至全球氣候變化的重要驅動力[3]。因此,土地利用分類受到廣泛的關注。
隨著遙感技術的發展,遙感影像數據被廣泛應用于土地利用分類中。陳磊士[4]等人基于Landsat8 與Sentinel-1A 影像使用卷積神經網絡和BP 神經網絡2 種分類算法對融合前后的遙感影像進行土地利用分類信息提取,其總體分類精度和Kappa系數分別為85.8091%和0.8124。肖艷[5]等以吉林省長春市部分區域為研究區,基于Landsat8遙感影像,在多尺度分割的基礎上,提取影像對象的光譜、紋理、形狀和空間關系特征,使用SVM分類器對研究區進行土地利用分類,總體分類精度和Kappa 系數分別為85.88%和0.8036。
然而,衛星影像容易受天氣影響,且成本高、分辨率低。近年來,無人機遙感由于其操作簡單、成本低、分辨率高且受天氣影響小等特點,迅速成為遙感監測的重要手段。劉舒[6]等基于超高分辨率的無人機影像,采用隨機森林算法對吉林省農耕區進行土地利用分類,總體精度最高達到了98.04%,Kappa系數為0.980。Akar[7]基于無人機影像對土爾其市區和農村兩個研究區進行土地利用分類,總體分類精度達到了93.33%。本研究以安徽省廣德市西莊村為研究對象,采用8種監督分類方法對研究區進行土地利用分類,對比不同分類方法的分類效果。通過對比不同分類方法在同一分類條件下的適用性,探討無人機多光譜影像在土地利用分類方面的潛力,為采用無人機多光譜影像進行土地利用分類提供方法參考。
1 材料與方法
1.1 研究區域
研究區域位于安徽省宣城市廣德市西莊村,地理位置為東經119°29′,北緯30°57′。屬暖溫帶與亞熱帶過渡區,季風明顯,四季分明,春暖多變、夏雨集中、冬季寒冷。該研究區的植被、水體、建筑用地較多。
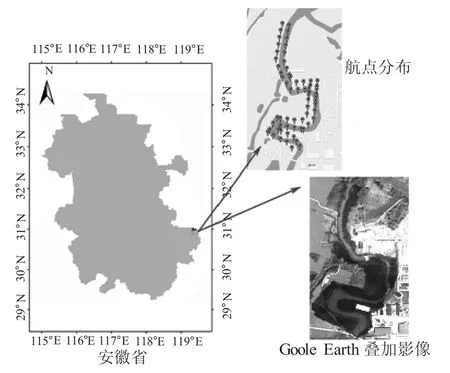
圖1 研究區分布
1.2 無人機多光譜影像獲取
采用無錫譜視界科技有限公司研發的大禹Specvision-W(圖2)無人機光譜成像系統進行數據采集。

圖2 大禹Specvision-W 無人機多光譜成像系統
大禹Spe-cvision-W 無人機光譜成像指數分析系統可實現實時飛行實時監測指標,多光譜相機參數見表1。數據采集時間為2021年10月22日,天氣為陰天,無人機飛行高度為150 m,航向重疊度于旁向重疊度均為60%。

表1 大禹Specvision-W 無人機多光譜成像系統主要性能參數
1.3 數據預處理
大禹Specvision-W 無人機高光譜數據預處理主要包括去馬賽克、圖像配準、去串擾、反射率校正以及圖像的拼接。圖像去馬賽克、配準、去串擾以及反射率校正集成在相機中完成,圖像拼接主要在Agisoft PhotoScan軟件中完成[8],主要過程為導入需要拼接的影像圖片以及POS信息,在此基礎上提取點云、網格和DEM,最終生成正射影像。預處理流程如圖3。
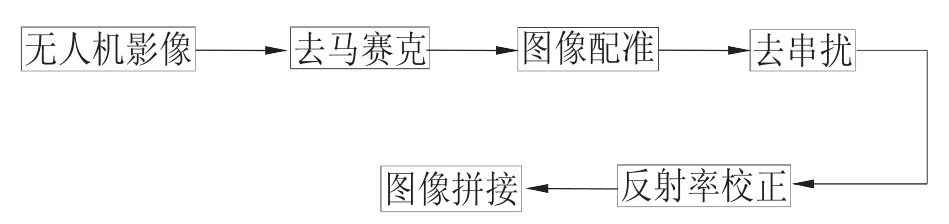
圖3 無人機影像預處理流程
1.4 分類方法
遙感影像的分類方法眾多,根據是否具有先驗知識分為監督分類和非監督分類,在實際的影像分類中,不同分類方法的適用性存在差異[9]。本研究采用監督分類方法中的最小距離法、馬氏距離法、最大似然法、神經網路、波譜角、決策樹、支持向量機、隨機森林8 種分類方法進行土地利用分類,對比不同分類方法的分類效果。
1.4.1 最小距離法與馬氏距離法
最小距離法和馬氏距離是常用的監督分類方法中計算分類距離的方法,基本原理為求一個已知類別向量和一個未知類別向量之間的距離,并將未知類別向量歸屬到距離最小的已知類別向量中。具有計算速度快、方法簡單的優點[4]。
1.4.2 最大似然法
最大似然法通常應用于兩類或者多類判別中,其基本原理為假設遙感影像每個波段中每個類的分布是正態分布,計算遙感數據中待分類樣本在所有類別中的歸屬概率,依據歸屬概率最大原則對分類樣本進行判別[10]。分類過程中最大似然法依據貝葉斯判決準則建立非線性判別函數集[11]。
1.4.3 波譜角
波譜角分類方法的基本原理是將多個波段的波譜響應作為矢量,通過未分類光譜與參考光譜間的夾角進行像元匹配分類,夾角越小未分類像元與參考像元越相似[12]。波譜角分類法由Kruse 于1993 年提出[13],研究證明,波譜角分類方法對波譜相似的林地和耕地分類效果較好[14]。
1.4.4 決策樹
決策樹是一種通過訓練樣本進行歸納學習,建立決策樹或決策規則,然后使用決策樹或決策規則對數據進行分類的方法。決策樹由不同的節點組成。每個節點只能有一個父節點和兩個或多個子節點。節點之間通過分支相互連接,每個內部節點對應一個測試屬性或屬性組,每個屬性組對應不同的可能屬性值。決策樹分類方法具有層次結構清晰、運算簡單、處理速度快等特點[15]。
1.4.5 支持向量機
支持向量機(Support Vector Machine,SVM)最初由Comes&Vapnick 于1936 年[16]提出,這是機器學習的里程碑。SVM本質是一種統計學習算法[17],是一種線性和非線性均使用的算法。SVM作為監督分類算法,其核心是尋找最小化結構風險,即將不同類別的樣本無差錯分類的同時,保證各樣本間具有最大分類間隔。SVM 的最優分類面取決于支持向量,因此,在遙感影像分類中,核心是根據各類別的訓練樣本和約束條件,選取最優支持向量,并基于支持向量構建超平面(最優分類面)。SVM最初用于二分類,根據兩類樣本計算超平面[18]。SVM判別函數為:

公式中xi為支持向量,x為未知向量,f(x)就是支持向量機分類器,在形式上類似于一個神經網絡,其輸出的結果是若干中間層節點的線性組合,而每一個中間層節點對應輸入樣本與一個支持向量的內積,因此也被叫做支持向量網絡分類結果。
1.4.6 隨機森林
隨機森林(Random Forest,RF)算法是由Breiman[19]等人于2001 年首次提出的,是在決策樹的基礎上提出的一種學習算法,其核心是多個決策樹集成的分類算法。相比其他機器學習算法,隨機森林在運算量沒有顯著提高的前提下提高了預測精度[20,21]。隨機森林算法的原理是在原始樣本中利用自主抽樣隨機抽取N 個樣本,對每個樣本進行決策樹建模,在此基礎上集成多棵決策樹的預測,通過每棵決策樹的投票結果得出預測結果。其中,隨機森林分類是由很多決策樹分類模型組成的組合分類模型,且參數集是獨立同分布的隨機向量[22]。
1.5 樣本選取
通過對安徽省廣德市土地利用情況進行調查,結合研究區的無人機多光譜影像、0.1 m 空間分辨率的輔助攝像頭圖像以及Goole Earth 影像,利用實地調查資料以及目視解譯法選取訓練樣本集和驗證樣本集。依據《土地利用現狀分類》(GB/T21010-2007)[23]標準中的一級分類,確定研究區的土地利用分類類別為建筑用地、林地、耕地、水體、裸地5 類。本研究選取不同地類樣本點共計15 000個,分別以2:1 的比例將各類樣本分為訓練樣本和驗證樣本。訓練樣本和驗證樣本的選取采用隨機模式,確保訓練樣本和驗證樣本服從同一分布。
1.6 精度評價
采用混淆矩陣對分類結果進行評價,確定分類結果的精度以及可靠性。構建混淆矩陣是目前遙感影像分類中最常用的一種量化分類精度方法[24],研究利用驗證樣本,基于最小距離法、馬氏距離法、最大似然法、波譜角、神經網絡、決策樹、隨機森林、支持向量機的分類結果,采用混淆矩陣對土地利用分類精度進行評價。評價指標為生產者精度(PA)、用戶精度(UA)、總體分類精度(OA)和Kappa 系數[25]。公式如下:
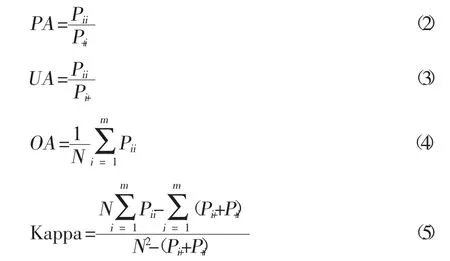
式(2)~(5)中Pii為混淆矩陣第i行第i列的樣本數;Pi+和P+i分別為混淆矩陣第i行和第i列的樣本總數;N為樣本總數;m為土地覆蓋類型。
2 結果與分析
2.1 不同地類光譜分析
研究提取不同地類的光譜曲線各2 000條,求其平均值,作為不同地類的光譜曲線(圖4)。從圖中可以看出機載多光譜數據不同地類之間光譜曲線存在一定的差異,特別是在500nm、600nm以及750nm范圍。光譜曲線的差異為采用光譜特征信息對土地利用進行分類提供了基礎。

圖4 大禹Specvision-W 無人機多光譜成像系統
2.2 不同分類方法分類結果分析
為了對比分析不同分類方法對機載多光譜數據地物分類性能的影響,研究采用最小距離法、馬氏距離法、最大似然法、波譜角、神經網絡、決策樹、隨機森林、支持向量機等8 種分類方法對安徽省廣德市研究區進行土地利用分類,8 種分類方法的分類結果如圖5。分析8 種分類方法的分類結果,各地類在空間上表現出相對一致性。8種分類方法分類結果中建筑用地主要位于研究區的中部且分布區域較少。林地遍布整個研究區,主要分布在研究區的中下部。水體貫穿整個研究區域,分布范圍僅次于林地。耕地在西北部以及西南部有分布,裸地主要分布于建筑用地附近,位于研究區域的東北部。8 種分類方法中支持向量機、隨機森林、決策樹、最大似然法分類方法各地物的類別分布范圍一致性較高,馬氏距離法、神經網絡、最小距離法分類結果具有破碎現象,地類分布范圍相對一致性較差。
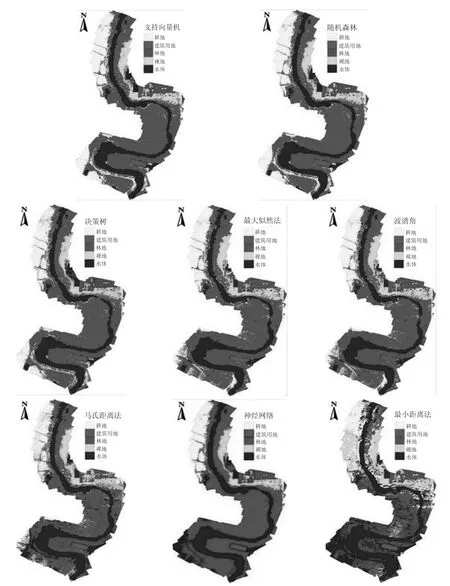
圖5 8 種分類方法分類結果對比
研究采用訓練樣本進行分類,在得到土地利用分類結果的基礎上,采用驗證樣本對分類結果及進行檢驗。精度檢驗可以表明土地利用分類效果的可靠性。下表為不同分類方法生產者精度(表2)、用戶精度(表3)、總體精度以及kappa系數(表4)。表2中,隨機森林、支持向量機和決策樹分類法的各地類的生產者精度均在95%以上,其中支持向量機分類法中水體和建筑用地的生產者精度達到了100%。最大似然法各地類的生產者精度也達到了80%以上,波譜角與最小距離法的生產者精度較差,最小距離法耕地的生產者精度僅為39.83%。
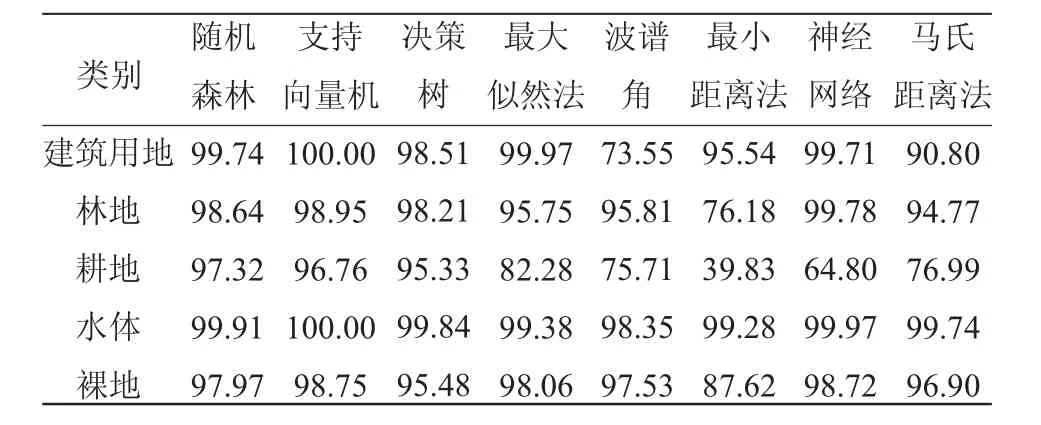
表2 不同分類方法生產者精度(PA)(單位:%)
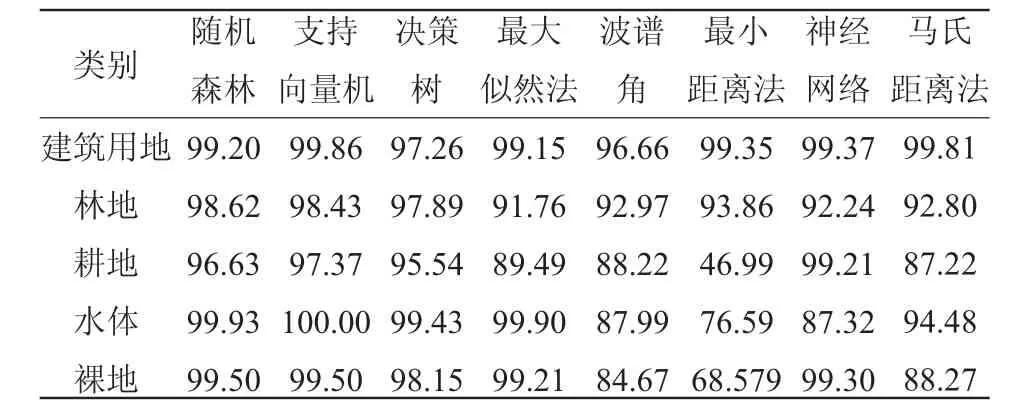
表3 不同分類方法用戶精度(UA)(單位:%)
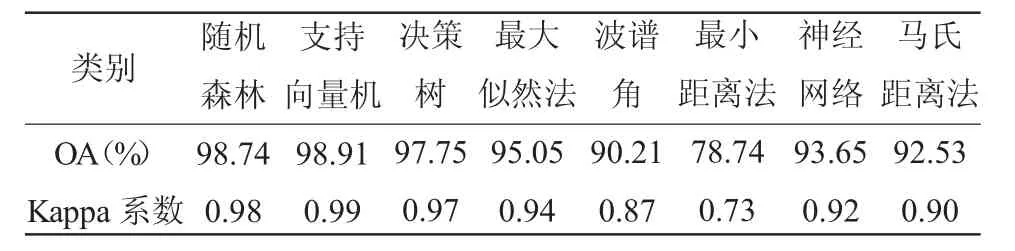
表4 不同分類方法總體分類精度(OA)和Kappa 系數
表3 中,隨機森林、支持向量機和決策樹的用戶精度最高,均達到了95%以上,其次是最大似然法,最大似然法的用戶精度均達到了89%以上,神經網絡和馬氏距離法各地類的用戶精度也達到了87%。
表4中,支持向量機土地利用分類的總體分類精度最高,達到了98.91%,kappa 系數為0.99。土地利用分類結果圖中隨機森林和決策樹分類法分類結果與支持向量機分類結果具有一致性,隨機森林的總體分類精度為98.74%,kappa 系數為0.98,決策樹的總體分類精度為97.75%,kappa系數為0.97。其次是最大似然法,總體分類精度為98.05%,kappa系數為0.94。神經網絡和馬氏距離分類法分類精度均為93%左右,kappa 系數分別為0.92、0.90。波譜角分類法的總體分類精度為90.21%,kappa 系數為0.87,最小距離法的總體分類精度最低僅為78.74%,kappa系數為0.73。
3 結論
本研究以安徽省廣德市西莊村為研究對象,通過機載無人機多光譜數據結合Goole Earth 影像以及無人機自帶的0.1 m 的RGB 影像,采用最小距離法、馬氏距離法、最大似然法、波譜角、神經網絡、決策樹、隨機森林、支持向量機分類法對研究區進行土地利用分類,結果表明:(1)機載多光譜數據由于其極高的空間分辨率以及較高的光譜分辨率,能夠很好地提高土地利用分類的精度;(2)對比不同的分類方法,隨機森林、支持向量機、決策樹以及最大似然法的分類精度較高,分類精度高于最小距離法20%左右。由此可見,基于無人機多光譜數據進行土地利用分類,隨機森林、支持向量機、決策樹分類法適用性更好,最小距離法和馬氏距離法適用性最差。
土地利用分類一直是城市建設規劃、水體變化監測、森林樹種識別等研究的關鍵,本研究所得結論為基于無人機多光譜影像數據的土地利用分類的方法提供了借鑒,進一步發揮了無人機多光譜技術在土地資源可持續發展利用方面的優勢。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
少兒科學周刊·少年版(2015年3期)2015-07-07 21:00:00