氣動人工肌肉外骨骼機器人位置跟蹤控制
2022-04-20 01:52:22趙智睿肖計春劉明芳郝麗娜
液壓與氣動 2022年4期
趙智睿, 張 航, 肖計春, 劉明芳, 李 醒, 郝麗娜
(1.東北大學 機械工程及自動化學院, 遼寧 沈陽 110819;2.東北大學 流程工業綜合自動化國家重點實驗室, 遼寧 沈陽 110819;3.東莞理工大學 電子工程與智能化學院, 廣東 東莞 523808)
引言
外骨骼機器人作為一種人機結合的可穿戴裝備,體現了控制工程、生物工程、機電工程以及人工智能領域中諸多技術的高度集成[1]。近年來,外骨骼機器人在生產生活以及醫療康復等領域具有諸多應用前景:一方面,外骨骼機器人可以輔助健康的穿戴增強其耐力和負載能力;另一方面,外骨骼機器人可以輔助具有運動障礙的患者和老年人進行有針對性的康復訓練以及恢復其部分運動功能[2-3]。傳統的外骨骼機器大多采用電機、液壓等驅動方式,可以為穿戴者提供較大的輔助力或力矩[1-3]。為了減輕本體質量,降低使用風險,一些機器人選擇以氣動人工肌肉(Pneumatic Artificial Muscle,PAM)作為驅動器[4-5]。PAM作為一種直線型氣動元件,由外部的剛性編織網和內部的柔性橡膠套管組成,具有結構簡單、自重輕、輸出力/自重比與生物肌肉相似、柔順性高等優點[6-8]。因此,使用PAM作為外骨骼機器人驅動器可以有效降低外骨骼機器人的本體質量,提高關節柔順性,減小了因意外而對穿戴者造成傷害的風險性。
在控制方面,PAM的力學模型較為復雜。不同于電機和液壓驅動系統,決定PAM輸出力的主要因素(即內部充氣壓力、橫截面積與收縮率)之間符合非線性關系,各參數之間存在耦合[7]。其內部橡膠套管和外部編織網之間的摩擦以及橡膠材料固有的周期性松弛特性則進一步增加了PAM的控制難度[8]。而對于外骨骼系統而言,使用PAM則意味著對外骨骼機器人動力學模型引入更多未知的擾動項和未建模項,增加了控制器對外骨骼機器人實現位置跟蹤的難度。此外,考慮外骨骼機器人系統的結構參數存在一定范圍的攝動,因此依賴于對實驗數據進行在線或離線辨識獲得的動力學模型往往結構復雜,參數的精度有限[9-11]。
針對上述問題設計了一種雙層控制結構,用于實現外骨骼機器人的關節位置跟蹤。其上層控制器以動力學模型為基礎,引入了自適應律和滑模控制器降低了控制器受參數不準確和未知擾動的影響。底層控制器則利用無模型方式建立了氣動肌肉輸出力閉環系統,實現了底層控制與上層控制的協同一致。最后,設計了仿真實驗和穿戴實驗,對上述方法進行驗證。
1 上層控制器設計
為實現外骨骼機器人的關節位置跟蹤控制,依據動力學模型設計了上層控制器計算關節驅動力矩。上肢外骨骼機器人的動力學模型見式(1)[9]:
(1)
式中,τδ—— 外部干擾力矩
τh—— 穿戴者對外骨骼關節處施加的相互作用力矩
G—— 外骨骼機器人的重力矩
u—— 控制律
τd—— 包含系統的未建模項以及擾動項
對于式(1),M0和C0為估計的動力學參數。由于該值與真實參數之間存在偏差,即存在ΔM和ΔC。該式可進一步整理為式(2):
(M0+ΔM)-1u
(2)
e1=x1-x1d
(3)
(4)

γ—— 虛擬控制量
e2的導數為:
(5)
(6)
其導數為:
(7)

(8)
其導數為:
(9)

(10)
對于未知外部干擾項τδ,τh和G均可以通過實際測量后進行補償;針對未知項τd,相關研究表明,對于上肢外骨骼機器人系統,存在一個正數Γ≥0,使其大于|τd|[12]。因此,利用一階滑模控制器以提高系統的魯棒性[13]。最終,上層控制器的控制律見式(11)。
(11)
設s=e2,將式(11)重新帶入式(9)中,可整理為:
(12)
當s>0,式(12)可改寫為:
(13)
當s<0,式(12)可改寫為:
(14)
因此,所設計的控制器可以滿足外骨骼機器人系統的穩定性要求。
2 底層控制器設計
圖1a為一種基于模型的典型控制結構。其中,氣動人工肌肉的力學模型主要包含2種:三單元模型(唯象模型)和準靜態模型(物理模型)[14-16]。然而,2種模型結構都較為復雜,參數較多[17]。本研究則利用無模型方法直接對外骨骼機器人的關節力矩設計了閉環控制器,在外骨骼機器人的關節處安置了電子測力計,測量并計算實際的關節驅動力矩值。在此基礎上,設計了PI型反饋控制器,使用高速開關閥調整氣動人工肌肉的充氣和放氣狀態控制氣動肌肉的輸出力[18]。如圖1b所示,通過構建力矩閉環,提供足夠的關節驅動力矩達到外骨骼機器人的期望力矩。執行器的控制律見式(15),其中fPWM為高速開關閥的動作頻率。
(15)
式中,τd和τ代表期望和實際的關節力矩,P和I為比例系數和積分系數。
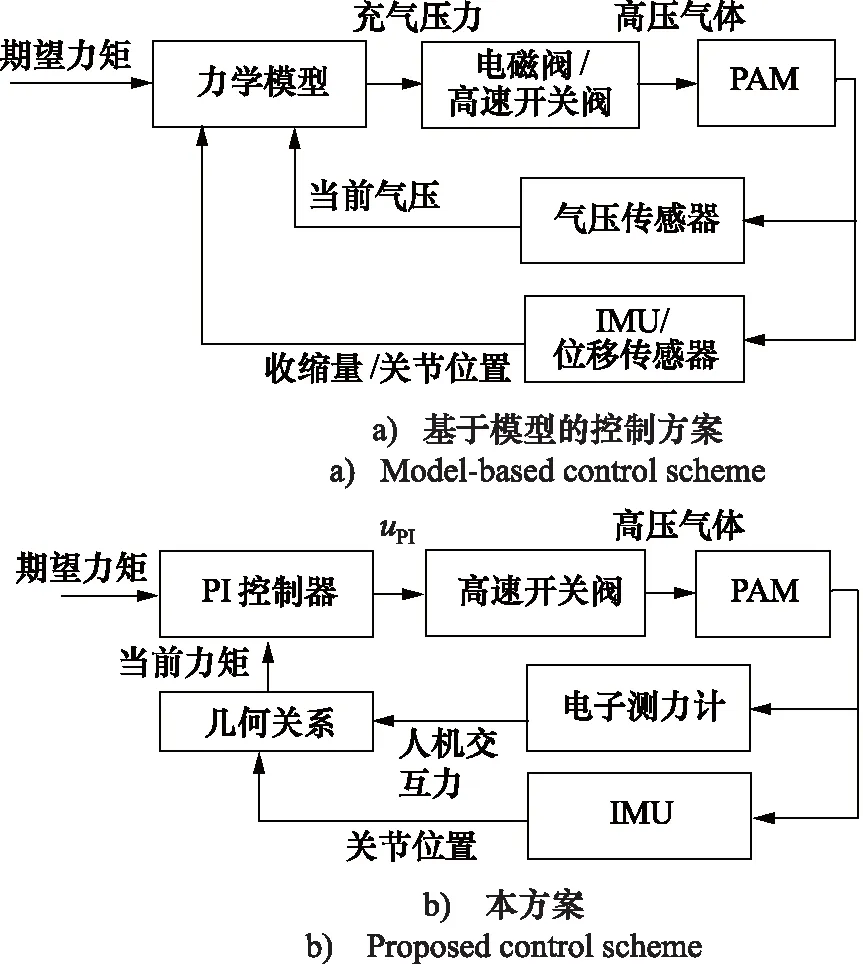
圖1 底層控制器設計方案Fig.1 Scheme of PAM control
關節力矩的測量方案如圖2所示,其中,拉伸彈簧的一端固定于外骨骼機器人的前臂,另一端通過連接環固定于電子測力計。拉伸彈簧僅用于補償關節旋轉后造成的位移,而定滑輪則用于約束拉伸彈簧的移動方向。電子測力計測量得到的彈簧拉伸力與力臂相乘后可視為關節力矩。為方便設計和制備,將力反饋裝置的安裝距離設為l1=l2=l。電子測力計的初始值為F0,關節驅動力矩的計算法則見式(16):
(16)
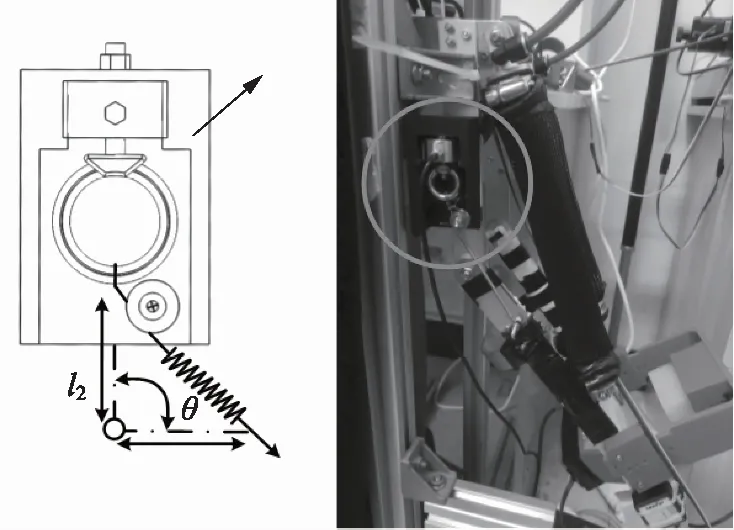
圖2 關節力矩測量方案Fig.2 Scheme of joint torque measurement
由于系統為并聯結構,外骨骼機器人的關節剛度由氣動肌肉的剛度與彈簧剛度共同決定。因此,為了降低彈簧對系統動力學性能的影響,其剛度應遠低于氣動肌肉系統的初始剛度值(6500~8000 N/m[19])。在制作過程中,考慮到彈簧振動對測量結果的影響,對比了2種不同剛度的彈簧并進行如下測試:實驗對象為2根相同長度(70 mm),剛度分別為180 N/m 和 300 N/m的拉伸彈簧;實驗平臺為肘關節外骨骼機器人。該機器人在肘關節處存在1個自由度,其大臂端和小臂端由2根收縮型PAM相連(長度280 mm,直徑35 mm,單根最大輸出力100 N)。使用的電子測力計量程為30 N(蚌埠傳感器系統工程有限公司,JLBM-1-3 kg),動態測量誤差為0.01,經測量安裝位置的最大等效力臂為50 mm。期望的關節力矩見式(17):
(17)
底層控制器取P為2000,I為80,關節驅動力矩跟蹤結果見圖3。實驗結果表明,采用300 N/m和180 N/m收縮彈簧的設計方案其底層控制器的均方根誤差分別為0.020 N·m和0.042 N·m。均方根誤差的計算見式(18),其中d代表期望值。因此,采用300 N/m收縮彈簧的方案更接近傳感器的測量精度0.015 N·m(30×0.05×0.01),可以滿足控制要求:
(18)
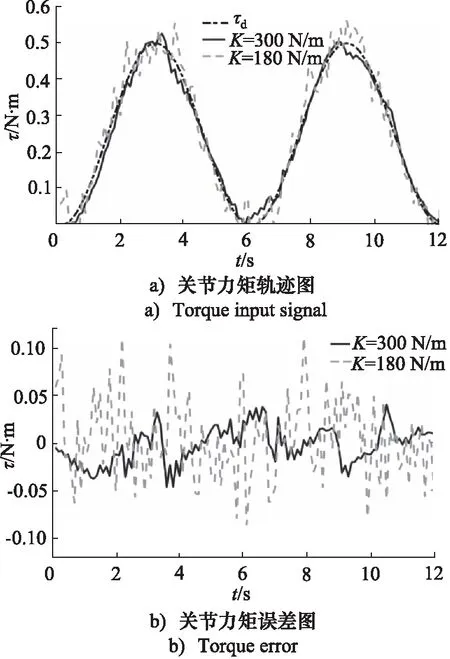
圖3 底層控制器力矩跟蹤測試Fig.3 Results of torque feedback loop
3 仿真與實驗
3.1 外骨骼運動仿真實驗
為驗證本研究所提控制算法的有效性,利用MATLAB 2016b設計了仿真實驗。參考軌跡設定為0.6 sin(0.2πt)。動力學模型簡化為式(19),其中mLl1sin(θ)視為仿真系統的未建模項以及擾動項。模型的相關參數見表1,控制器的參數見表2。控制器中使用的動力學參數與仿真系統的動力學參數之間均存在偏差。將PID控制器作為對比的控制方案(PID整定可根據Ziegler-Nichols法,首先將積分、微分系數置0,然后調節比例系數,再根據經驗和結合實際情況適當放縮微分和積分系數,最終取比例系數為25,積分系數為10,微分系數為12.5),仿真結果見圖4。其結果表明,在相同外部干擾下,使用本研究所提控制器,其均方根誤差為6.68e-5 rad,最大誤差為9.8e-3 rad,小于PID控制器的均方根誤差(2.4e-4 rad)和最大誤差(1.1e-2 rad)。因此,所述控制器在外部干擾下具有更好的跟蹤效果:
(19)
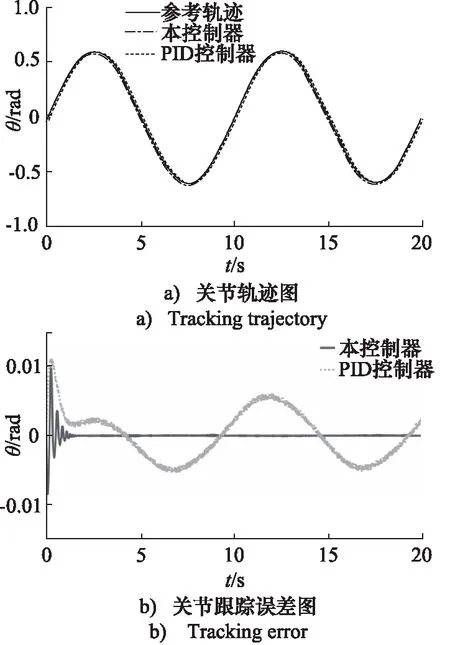
圖4 位置跟蹤仿真Fig.4 Tracking performance of simulation
3.2 外骨骼穿戴實驗
為進一步驗證所設計的外骨骼機器人控制系統及控制算法的性能,設計并完成了穿戴實驗。選取1名身高為180 cm,質量75 kg,年齡為25歲的健康成年男性作為實驗對象,穿戴外骨骼機器人進行肘關節屈曲/伸展動作位置跟蹤控制。所設計的實驗分為兩組,第一組采用PID位置跟蹤控制器,第二組采用本研究設計的位置跟蹤控制器。
如圖5所示,控制系統分為上層的模型參考自適應控制器和底層的關節力矩控制器。上層控制器(即上位機)根據慣性傳感器、人機交互力傳感器反饋的外骨骼機器人的關節角度值和相互作用力矩計算外骨骼機器人的關節輸出力矩。底層控制器(即Arduino和驅動電路板)將得到的關節輸出力矩作為期望值,經PI算法實時調整實際關節輸出力矩。外骨骼機器人的關節運動參考軌跡由上位機指定,表達式見式(20)。該軌跡保證了起始位置為0 rad,運動周期為6 s,幅值為0.6 rad。
(20)
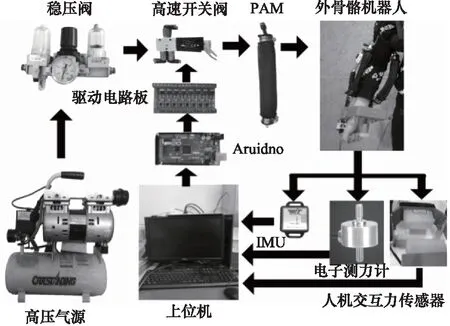
圖5 實驗設備Fig.5 Experimental setups
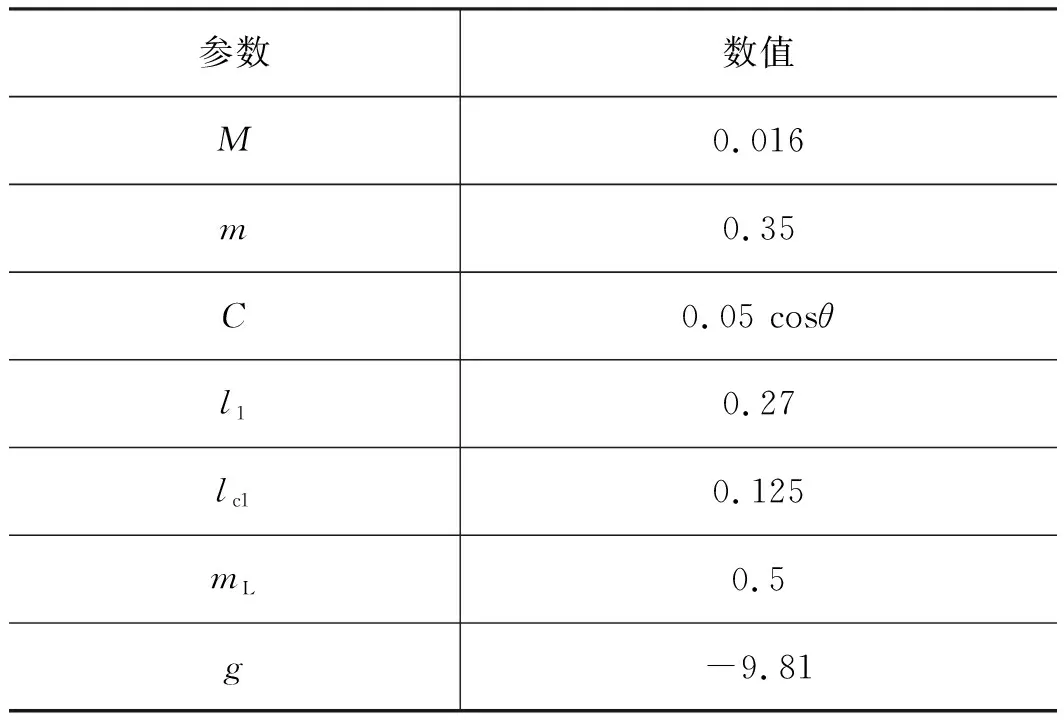
表1 仿真系統動力學模型參數表Tab.1 Parameters of dynamic model
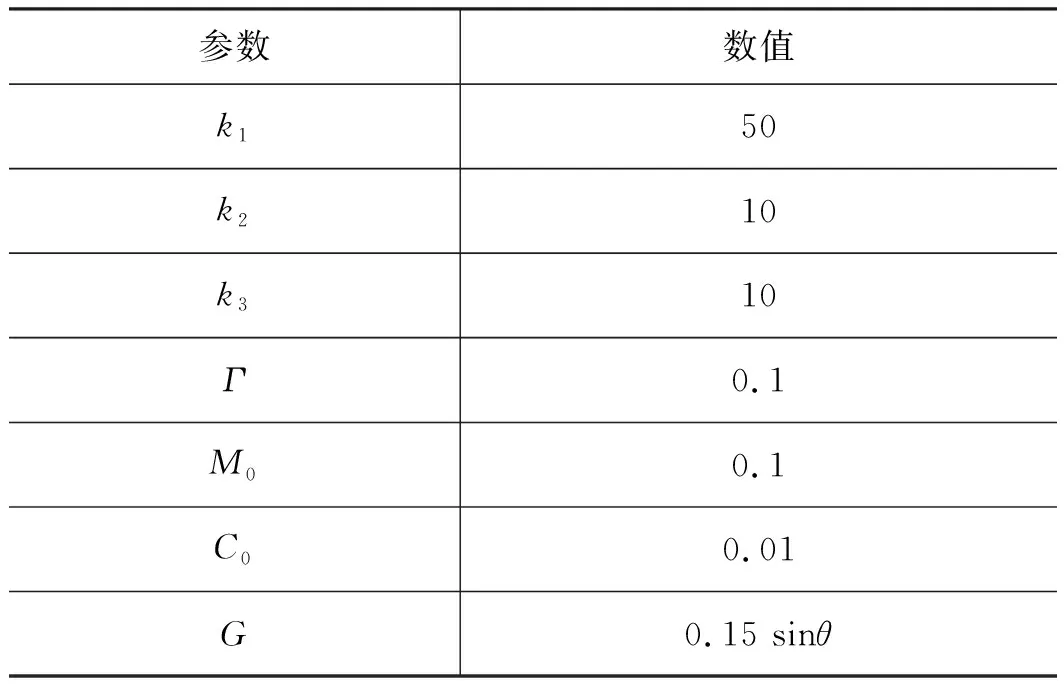
表2 仿真系統控制器參數表Tab.2 Parameters of proposed controller
圖6為實驗過程中的人機接觸力測量值。兩組實驗的接觸力曲線趨勢一致且最大值相似(4.21 N和4.48 N)。因此,兩組實驗可認為是在近似相同的條件下采用不同的控制器進行同樣的跟蹤任務。圖7為兩種控制器的跟蹤效果,其中PID位置跟蹤控制器的設計過程見相關文獻[20]。經實驗驗證,本研究提出的控制器的控制效果優于PID控制器,其中PID控制器的最大跟蹤誤差和均方根誤差分別為0.831 rad和0.036 rad,而本研究提出的控制器則為0.514 rad和 0.024 rad。 因此,與PID位置控制器相比,本研究所提控制方法更適合于完成外骨骼機器人的關節位置跟蹤任務。
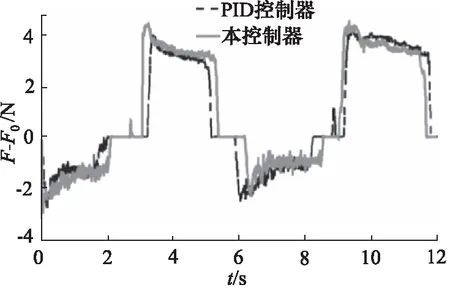
圖6 人機接觸力Fig.6 Human-robot interactive force
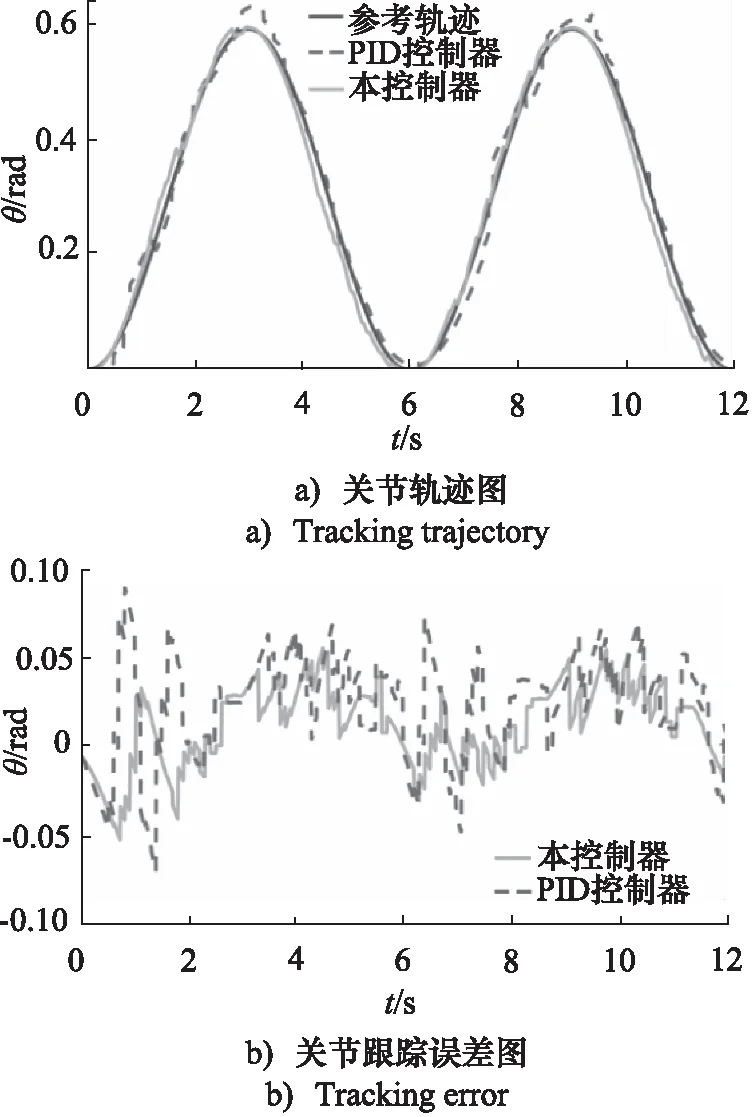
圖7 外骨骼穿戴實驗Fig.7 Results of wearable experiment
4 結論
(1) 設計了基于動力學模型的外骨骼機器人關節位置控制器,并結合了自適應算法和滑模控制方法增加了控制器的魯棒性。仿真實驗和穿戴實驗結果表明,所提出的控制方法實現了氣動人工肌肉外骨骼機器人的關節位置跟蹤任務。
(2) 針對以氣動人工肌肉作為外骨骼關節驅動器的機器人系統,設計了基于PI控制方法的底層力矩控制器,避免了氣動人工肌肉的復雜建模過程。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
