LIDAR 技術在農村房地一體項目中的應用研究
2022-04-20 08:20:24麻萬金
科學技術創新 2022年11期
張 健 麻萬金
(三和數碼測繪地雷信息技術有限公司,甘肅 天水 741000)
農村房地一體項目是一項惠民工程,通過對房屋和宗地進行登記確權,頒發不動產證書,就可以使房屋具有商品性質,可用房屋進行抵押貸款和買賣[1-3]。然而農村房屋不動產測繪,采用傳統方式作業不但效率低、生產成本高、風險高,而且很難按時按點完成確權和頒證[4-5]。為了減少作業成本,提高作業效率,降低作業風險,本文在分析和研究了LIDAR 技術后,提出采用LIDAR 技術進行農村房屋不動產的測繪,并采集宗地、房屋等界址點,丈量多條宗地、房屋邊長,對本文方法生產的地籍圖精度進行檢測。結果表明,采用本文的方法,生產的地籍圖精度能夠滿足甘肅省農村房屋一體確權項目精度要求,且作業效率是傳統作業方式的2-3 倍,生產成本明顯降低,外業工作量明顯減少,使得作業風險有效降低,可以作為一種新的作業方式,用于農村房地一體項目中來。
1 LIDAR 技術
LIDAR 是一種全新的測繪方式,和傳統的攝影測量來說,其獲取的原始數據和后期的算法是不一樣的。LIDAR 是一種集全球定位系統(GPS)、慣性導航系統(INS)和激光三種技術設備于一身的系統[6-8]。其原理依據的是“直線傳播”,即激光器發射一束激光信號,沿著直線進行傳播,在碰到障礙物后,則會沿原路返回,而返回的激光信號則會被接收系統收集。結合傳播速度,激光器所在的位置、姿態和返回的時間,則可以精確計算得到障礙物的空間三維坐標,而發出的激光信號是非常密集的,這樣就可以得到高密度的三維點坐標,即通常說的數字表面模型(DSM)[9-11]。對于建構筑物來說,則可以獲取建構筑物的棱角坐標,通過人機交互的方式,就可以得到地籍圖成果。根據精度要求的高低,在實際作業中,可能需要引入控制點來對LIDAR 成果進行精度校正。目前LIDAR 按照搭載平臺的不同,主要可以分為機載LIDAR 和地面LIDAR,在實際作業中,可以根據任務區的特點進行靈活選取。比如,如果采集的對象主要是地表高程,則一般采用機載LIDAR 方式;采集的對象是建構筑物的立面,則一般采集地面LIDAR 技術。地面LIDAR 又分為車載LIDAR、背包式LIDAR 和手持LIDAR,具體選擇要結合項目需求進行,該技術用于地籍圖制作的流程如圖1 所示。
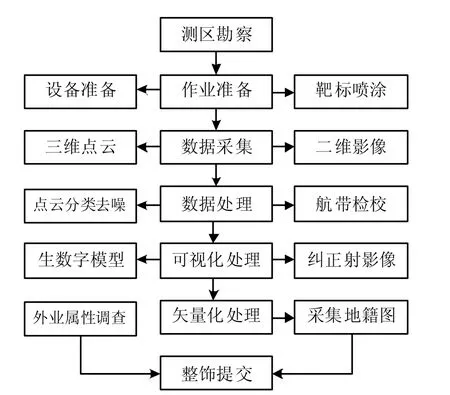
圖1 基于LIDAR 技術的地籍圖制作流程
2 案例分析
本次任務區位于甘肅省天水市某一農村,房屋分散稀疏,且房屋建設因地制宜,地勢坡度大約三十多度,高大樹木較多,采用傳傾斜攝影測量的作業方案,很難獲取分辨率相同的影像,且房屋被樹木遮擋嚴重,后期模型會存在較多變形拉花的地方,不利于后期進行地籍圖的采集。為了提高作業效率,結合本任務區的特點,本次作業選用地面LIDAR 的作業方式進行地籍圖的生產。
2.1 控制測量
為了確保后續成果的精度可以滿足地籍精度要求,本次作業過程中,按照500 米的間距,均勻采集控制點8個,這些控制點的點位均噴涂在建構筑物的立面上,這樣可以有效提高后期成果校正的精度。采集坐標時,先利用GPS-RTK 在靜態條件下測量兩個坐標,然后在已知點上架設全→儀,接著采集噴涂的點位,由于遮擋嚴重,本次采集8 個控制點共設→8 次,采集的成果精度可以達到毫米級精度。利用GPS-RTK 在任務區精度薄弱區域,選擇建構筑物的界址點進行坐標測量,共采集檢測點21 個;利用卷尺測量房屋邊長和宗地邊長,共量測檢測邊15 條,用于后期地籍圖成果的界址點和邊長精度檢測。采集時,使用南方測繪公司最新的RTK 設備,該設備可以自動將傾斜坐標轉換為垂直坐標,避免了桿子傾斜帶來的誤差,提升了采集效率,且使得采集的坐標值更加可靠。
2.2 點云數據采集
本次作業選用中海達的手持SLAM 設備,該設備體積小,輕巧攜帶,且每秒發射激光雷達數量多,可以準確采集建構筑物棱角的坐標,且其格式為通用的las 格式,有利于內業對其進行準確采集。結合設備待電時長,本次作業分為兩次完成,在采集接邊區域時,采集重疊區域較多,里面包含了三個控制點。數據采集完成后,通過人機交互的方式,將采集軌跡展開到lidar-dp 點云處理軟件中,通過查看軌跡,本次作業采集無遺漏,成果可用。在采集點云的同時,利用設備上搭載的相機,同步采集了對應的影像數據,這些影像數據主要用于后期紋理信息的映射和成果的套合。
2.3 點云數據處理
點云數據處理主要包括接邊數據處理和點云濾波去噪,利用8 個控制點,對兩次采集的點云數據進行了校正,利用3 個公共點對接邊區域的點云坐標進行校正,在誤差均小于2cm 后,對兩架次接邊區域的坐標求平均值,作為最終的成果坐標。完成接邊后,利用西安煤航的lidar-dp 特有的濾波算法,對處理后的點云成果進行濾波處理,過濾掉噪點和一些樹木、植被的坐標值,只保留宗地和房屋的三維點坐標,對于因為遮擋嚴重而無法準確得到的三維點坐標,在后期地籍圖采集時,結合外業實地采集進行補充完善。對于濾波效果不好區域,可通過人機交互的方式再次進行不同點類型的分類,然后根據需求剔除無用的墊層。在完成點云數據的校正后,利用控制點同樣對采集點云時采集的二維影像進行校正,讓影像的精度能夠和點云精度相對應。
2.4 可視化處理
濾波后的點云是孤立的三維點坐標,且缺少紋理信息,在后續數據采集時,對作業人員要求太高,因此對其賦上紋理信息,讓其與真實現狀一樣,這樣就更有利于對界址點、界址線進行準確判斷和采集。利用西安煤航的lidar-dp 軟件對已有的三維點坐標進行不規則三角網的構建,待不規則三角網TIN 構建完成后,通過一種合適的算法為待映射模型表面上的所有頂點賦彩色值,工作過程中將二維圖像映射至三維模型,從而使模型具有真實感。映射可分為正向映射和反向映射,在這里采用正射映射方式,將影像紋理映射到密集的三維點坐標上,這樣就可以通過紋理的變化準確得到建構筑物的邊角信息了。映射原理如圖2 所示。

圖2 映射原理示意圖
2.5 矢量化處理
本次地籍圖采集,使用清華山維公司的EPS 軟件,首先加載處理后的點云數據,然后軟件自動將las 格式轉為軟件可以加載的pcd 格式并進行加載。在矢量化的過程中,首先根據需要采集的對象選擇對應的命令,然后進行采集。在采集房屋時,為了提高房屋采集效率,選用“五點房”命令進行采集,該工具采集房屋不但效率高,而且角度都是垂直的,非常適合用于矩形房屋的采集,在采集的同時,對房屋的結構和層數進行完善。由于點云數據缺失等原因導致內業無法準確采集的,利用全→儀或者GPS-RTK 進行外業采集,對于內業無法準確判斷的房屋等屬性,在外業補充采集時進行完善。
在矢量化完成后,和傳統的作業方式進行對比,在矢量化相同數目的宗地房屋,本文的作業效率約是傳統方式的2.5 倍,結合外業補充采集,采用LIDAR 方式進行地籍圖制作,其效率是GPS-RTK 作業效率的2-3 倍。
3 精度統計分析
將檢測點導入到EPS 軟件中,利用EPS 自帶的精度檢測工具,通過人機交互的方式,對地籍圖成果精度進行檢測,檢測結果統計見表1。
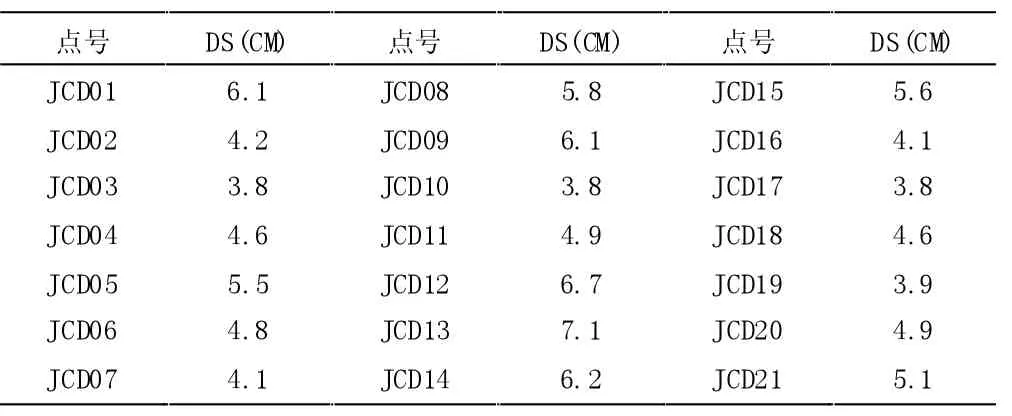
表1 界址點精度檢測統計表
按照同精度中誤差[12]計算方法,對表1 中的數據進行計算,可以得到本次21 個檢測點的中誤差為3.6cm,最大較差為7.1cm,要求中誤差為±5cm,最大誤差不超過2 倍中誤差,本次成果經檢測,其界址點精度可以滿足規范要求。
采用人機交互的方式,用CASS 軟件打開地籍圖成果,統計檢測邊對應的矢量化邊長,然后求取二者之間的較差,檢測統計結果見表2。

表2 界址邊精度檢測統計表
由表2 可知,15 條邊長,最大較差為12.3cm,平均較差為6.6cm。本次成果經檢測,其界址邊精度可以滿足規范要求。
4 LIDAR 技術優缺點分析
通過本次實際項目生產,綜合多方面的特點,得出LIDAR 技術以下幾方面的優缺點。
4.1 LIDAR 技術的優點
4.1.1 精度高。LIDAR 技術獲取的三維點坐標精度很高,可以用于大比例尺地形圖甚至地籍圖成果的測繪,且成果精度均勻,可靠性高。
4.1.2 外業工作量小。相比傳統的全野外地籍圖測繪,采用LIDAR 技術,外業工作量大幅度減小,外業工作基本上可以在一到兩天完成,其余工作全部在內業完成。
4.1.3 大幅度降低生產成本。對于全野外來說,各種費用支出大,對于LIDAR 來說,外業工作量小,支出主要在于采購設備。設備采購屬于一次性投入,后期費用支出少。
4.1.4 成果豐富。不光可以正常出房屋平面圖、立面圖,自動計算面積(全面積、半面積),標注標高、層數等屬性,同時形成的三維空間點云和三維模型數據可以作為電子存檔,供后期隨時查看校驗。
4.1.5 效率高。對于城鎮或鄉村不動產調查,由于遮擋比較嚴重,GPS 經常失鎖導致精度不夠,一般用全→儀測量房屋的四個面,然后內業成圖,但存在效率低,投入大的問題,并且項目和項目之間存在數據對接容易出錯的問題。
4.2 LIDAR 技術的缺點
4.2.1 對作業人員要求高。LIDAR 點云數據處理,對作業人員的業務技能要求高,目前LIDAR 點云處理的相關軟件較少。
4.2.2 三維點密度太高。LIDAR 點云密度太大,對作業電腦和軟件要求高,需要順暢加載龐大的點云數據,對其展示算法要求也很高。
4.2.3 三維點不一定位于特征點。雖然點的密度很高,但是三維點云具有隨機性,不一定剛好打在棱角上,因此有可能導致棱角精度降低。
4.2.4 設備價格較昂貴。較傳統的GPS-RTK、全→儀來說,LIDAR 設備價格較昂貴,且會使用的作業人員少。
結束語
本文提出使用LIDAR 技術進行地籍圖制作,通過外業采集檢測點和檢測邊,對本文提出的方案生產的地籍圖成果進行精度檢測,其界址點中誤差為3.6cm,界址邊平均較差為6.6cm,且最大較差均未超限,因此本文方案可應用于農村房地一體項目之中,從而減少外業工作量,提升作業效率,可為房地一體項目作業人員提供有效參考。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
甘肅教育(2020年14期)2020-09-11 07:57:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
兒童故事畫報(2013年3期)2013-06-24 05:40:30