一種教學(xué)用的低成本六軸機器人設(shè)計與研究
2022-04-20 08:21:08章家藏
科學(xué)技術(shù)創(chuàng)新 2022年11期
關(guān)鍵詞:結(jié)構(gòu)教學(xué)
章家藏
(浙江安防職業(yè)技術(shù)學(xué)院,浙江 溫州 325016)
1 概述
工業(yè)機器人是一種可替換人工重復(fù)作業(yè)的多自由度機械手,具備了相應(yīng)的自動化、可編程性、半自動化等功能,并可以利用自己的機械控制和動力能源完成不同功能, 如工業(yè)加工、裝配、搬運等,因此被廣泛應(yīng)用于制造、物流、能源、化工、電子等各種領(lǐng)域中。目前工業(yè)機器人核心技術(shù)被國外的庫卡、ABB、安川、發(fā)那科四大公司壟斷,國內(nèi)比較好的企業(yè)有新松機器人等。2022 年是《中國制造2025》實施的第8年,培養(yǎng)工業(yè)機器人相關(guān)技術(shù)人才是提高國家制造業(yè)創(chuàng)新能力的重要一環(huán),因此在國內(nèi)眾多大專院校中均開設(shè)了工業(yè)機器人技術(shù)相關(guān)專業(yè)。目前試驗或教學(xué)等相關(guān)的設(shè)備多大依賴進口,然而進口的設(shè)備存在諸如體積大、設(shè)備價格高、使用和維護成本高、安全系數(shù)低的缺點,且此類設(shè)備只能用于示教演示,學(xué)生靜態(tài)觀察學(xué)習(xí),無法動手參與到實踐當(dāng)中。本文研制的基于Mini ESP8266 控制的舵機驅(qū)動教學(xué)用工業(yè)機器人,擁有設(shè)計和制造成本低、總體尺寸小、無安全隱患的優(yōu)點,因此可在實訓(xùn)室批量配置,便于學(xué)生手動實踐,能夠較好地解決了進口大型設(shè)備的實驗教學(xué)難題。該設(shè)備可在智能制造、計算機、自動化、機械電子等各類工科相關(guān)專業(yè)中推廣使用[1]。
2 六軸教學(xué)用機器人的結(jié)構(gòu)設(shè)計與分析
為降低成本,本文利用SolidWorks 建模,使用3D 打印機打印各類部件,并充分考慮模塊化的設(shè)計思想,便于在批量化生產(chǎn)時實現(xiàn)零件的互通互換,從而降低設(shè)計、制造、維護成本。
2.1 機械手的結(jié)構(gòu)設(shè)計
圖1 所示教學(xué)用的六軸機器人整體結(jié)構(gòu)設(shè)計方案,主要包括底座、轉(zhuǎn)盤、固定支架,固定支架上鉸接有大臂,大臂上鉸接有小臂,小臂上鉸接有腕部支架,腕部支架設(shè)有末端執(zhí)行器支座,支座上設(shè)有末端執(zhí)行器(手爪)。底座上安裝有內(nèi)舵機,內(nèi)舵機的輸出軸與轉(zhuǎn)盤連接,固定支架上安裝有第一舵機,第一舵機的輸出軸與大臂連接,大臂上安裝有第二舵機,第二舵機的輸出軸與小臂連接,小臂上安裝有第三舵機,第三舵機的輸出軸與腕部支架連接,腕部支架上安裝有第四舵機,第四舵機的輸出軸與支座連接,支座上安裝有第五舵機,第五舵機的輸出軸與第一爪子齒輪連接。整體結(jié)構(gòu)簡單,操作方便,利于在教學(xué)過程中進行展示。

圖1 教學(xué)用的六軸機器人整體結(jié)構(gòu)設(shè)計
末端執(zhí)行器:
圖2 所示,機械臂的末端執(zhí)行器(夾爪)是由兩個帶有半齒輪的手爪組成,左邊為驅(qū)動手爪,連接舵機驅(qū)動軸;右邊為從動手爪,自由安裝在轉(zhuǎn)軸上。舵機旋轉(zhuǎn)時帶動左手爪轉(zhuǎn)動,通過嚙合的齒輪,實現(xiàn)手爪的開合抓取。

圖2 末端執(zhí)行器(左)大臂/小臂結(jié)構(gòu)(右)
大臂/小臂:
大臂與/臂的零件相同,可以互通互換。若需提高該機器人的工作范圍,可繼續(xù)鉸接該部件,提升機械臂的靈活性。
2.2 有限元分析
機器人結(jié)構(gòu)在設(shè)計初期無法考慮到實際工作過程中需要的剛度特性、機械強度,一般優(yōu)先考慮材料、設(shè)計尺寸、外部輪廓等參數(shù),所以設(shè)計最后需針對結(jié)構(gòu)大小臂做有限元分析,驗證機械臂在負(fù)載受力情況下剛度和強度能否滿足日常教學(xué)研究使用條件,在此基礎(chǔ)來確定是否要對其結(jié)果做出針對性優(yōu)化[2]。
大、小臂是結(jié)構(gòu)中通用且受力較大、容易變形的部件,因此本文僅對大小臂做力學(xué)分析。首先將SolidWorks 三維建模軟件中已建好的三維結(jié)構(gòu)導(dǎo)出成STEP 格式,將STEP格式的結(jié)構(gòu)模型導(dǎo)入到hypermesh 靜力學(xué)仿真軟件中,尺寸單位選擇mm,其材料選擇為用于快速成型(3D 打印)的ABS 材質(zhì),收縮率為0.65%左右,材料密度為1g/cm3左右,拉伸強度為63MPa,泊松比為0.394,邵氏硬度為92 度,彈性模量約為2000MPa[2]。在軟件中設(shè)置好以上材料性能參數(shù)后,使用四面體作為單元劃分類型,指定網(wǎng)格尺寸為1mm,網(wǎng)格劃分最終結(jié)果如圖3 所示。

圖3 結(jié)構(gòu)的網(wǎng)格圖
完成上述步驟后,增加約束和載荷。結(jié)構(gòu)部件上端鉸接有其他部件,可視為負(fù)載,將其設(shè)定為固定端,部件下端連接有作為驅(qū)動的舵機,對下部分施加扭矩。為了便于分析,設(shè)定施加的總扭矩為50N·m,采用optistruct 軟件仿真分析,得到該部件的應(yīng)力如圖4 所示。

圖4 結(jié)構(gòu)的應(yīng)力分析圖
從應(yīng)力分析圖來看,該部件的最大應(yīng)力出現(xiàn)在部件和驅(qū)動舵機連接處,大小為0.4453MPa,可知該值遠低于ABS材料的許用應(yīng)力值,故結(jié)構(gòu)設(shè)計滿足工作要求,不會影響六軸機器人性能和其他工作部件,無需對其做特殊優(yōu)化或做加大尺寸處理。
3 六軸教學(xué)用機器人控制系統(tǒng)設(shè)計
為降低產(chǎn)品成本,除結(jié)構(gòu)優(yōu)化及采用快速成型的加工方式外,在硬件選擇上盡可能選用性價比高的零件,故采用了TS90A型號的舵機驅(qū)動、ESP8266 型號的模塊控制。
3.1 TS90A舵機
本文采用舵機(伺服馬達)作為機器人基本執(zhí)行結(jié)構(gòu),型號為TS90A、堵轉(zhuǎn)扭矩:16-18N·cm(4.8V)、可控制角度0~180 度、工作電壓:4.8V-6V,該舵機的優(yōu)勢是控制簡單,價格低。

圖5 舵機實物圖
對本文的六軸機器人而言,需六個舵機協(xié)同工作。通過控制模塊發(fā)送有效的PWM拓展模塊信號,如圖6 所示的工作原理圖先輸出控制脈沖到控制電路,由此來控制馬達,馬達帶動減速齒輪組,反饋到比例電位器,通過比例電壓形成閉環(huán)控制。TS90A舵機的組成包括控制電路板、位置反饋檢測器、電機、限位開關(guān)等[3]。

圖6 TS90A舵機的工作原理
TS90A 舵機的控制需輸入一個約為20 毫秒的時基脈沖,該脈沖的高電平為500 微秒~2500 微秒的角度控制脈沖。如表1 所示,180 度角度伺服對應(yīng)的控制關(guān)系。
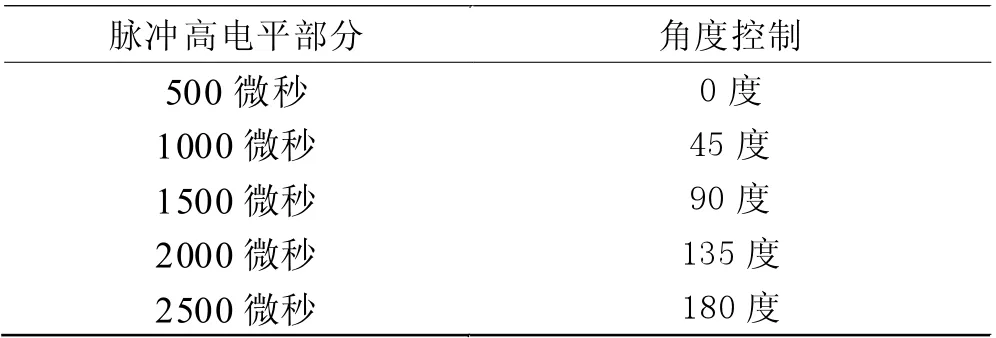
表1 脈沖與角度對應(yīng)表
3.2 ESP8266 控制模塊
ESP8266 是一種高度集成的Wi-Fi MCU(微控制單元),廣泛應(yīng)用在物聯(lián)網(wǎng)中。該模塊集成了Wi-Fi 天線、片上SRAM和32-bit 處理器。ESP8266 能通過GPIO 口集成傳感器和其他設(shè)備,另外片內(nèi)還集成了天線開關(guān)、低噪聲接收放大器、濾波器等,開發(fā)成本低,性價比高。因此選用了ESP8266 控制六軸機器人的舵機,能夠較好實現(xiàn)所需功能,利于學(xué)生的二次開發(fā)學(xué)習(xí)。圖7 所示為ESP8266 控制模塊原理圖[4]。

圖7 ESP8266 控制模塊原理圖
因本文中的六軸機器人僅需舵機控制,出于降低成本的考慮,最終選用了ESP8266 的mini 版本,即mini ESP8266 模塊。選用此版本在不降低產(chǎn)品性能的前提下,進一步降低了成本,同時保留了wifi 功能。(圖8)
Mini ESP8266 有D0 到D8 共9 個數(shù)字接口,最多可以連接控制9 個舵機,本文只需用到6 臺舵機,故任意選用其中6 個接口即可。每臺舵機都有灰橙紅三根連接接口,其中紅色連接線連接控制板的5V口,灰色連接線連接G 口(由于控制模塊只有一個5V接口和一個G 接口,無法同時給6 個舵機同時供電,故需借助杜邦線和面包板擴充給多個舵機供電)。舵機的控制線(橙色線)各自連接到控制板D0-D8 中的任意接口,從而實現(xiàn)對舵機的單獨控制。
Mini ESP8266 有三種編程方式:第一種是使用AT指令進行操作。這種方式無需編程,可與單片機配合使用,也可以在PC端安裝調(diào)試軟件使用。第二種是LUA語言編程,這種方式不需要依靠串口調(diào)試軟件與單片機。第三種方式是采用Arduino 開發(fā)環(huán)境編程,本文采用了此類方式,在PC端使用Arduino開發(fā)方式進行開發(fā)。
3.3 控制系統(tǒng)程序的設(shè)計
本文用 C 語言在Arduino ide 環(huán)境中編寫程序,首先使用命令#include<Servo.h>調(diào)用Arduino 伺服舵機庫文件,使用Servo servo命令創(chuàng)建舵機對象(第二servo 是指舵機名稱,可任意編寫)。使用命令servo.attach(int pin,[int min],[int max])來選擇舵機控制參數(shù),其中int pin用于選擇舵機,如填寫D0 即控制接了D0 口的舵機,[int min],[int max] 分別表示最小角度,最大角度。使用servo.write(int value)命令來控制舵機旋轉(zhuǎn)的角度,如果輸入的值為大于300,則視為脈沖寬度(微秒)。使用servo.writeMicroseconds(int value)命令以微秒為單位寫入脈沖寬度。使用servo.detach()命令使舵機與其針腳分離,該針腳可繼續(xù)被用作PWM接口。
控制舵機轉(zhuǎn)動的原理是,給舵機一個特定PWM信號,舵機會轉(zhuǎn)到相應(yīng)角度。以微秒級高電平再轉(zhuǎn)為低電平信號來控制舵機轉(zhuǎn)到指定角度,舵機要持續(xù)發(fā)信號直到目標(biāo)角度,通常響應(yīng)500 微秒到2500 微秒間的值,其中1000 為逆時針方向,2000 為順時針方向,1500 在中間位置。具體對應(yīng)參數(shù)可參考表1 中的脈沖與角度對應(yīng)表。
Mini ESP8266 控制板帶有wifi 模塊,本文的機器人還可以通過wifi 連接PC,通過編寫簡單的網(wǎng)頁按鈕,利用網(wǎng)頁控制機械手的運行如圖9 所示。

圖9 網(wǎng)頁控制六軸機器人界面與實物圖
4 結(jié)論
本文設(shè)計是一款基于Mini ESP8266 的3D打印教學(xué)用的低成本六軸機器人。介紹了機器人的結(jié)構(gòu)設(shè)計與分析,舵機控制等。為降低成本,本文在結(jié)構(gòu)設(shè)計、硬件材料的選擇等做了優(yōu)化。采用本機器人教學(xué)可以培養(yǎng)學(xué)生的3D 建模能力、程序編寫能力。對工業(yè)機器人專業(yè)的學(xué)生而言,熟悉工業(yè)機器人在關(guān)節(jié)坐標(biāo)系下的運動方式和控制方式是非常重要的,能使學(xué)生有具體和形象的接觸理解。本文的設(shè)計已申請相關(guān)專利。
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
甘肅教育(2020年14期)2020-09-11 07:57:50
甘肅教育(2020年12期)2020-04-13 06:25:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
東方教育(2017年19期)2017-12-05 15:14:48
唐山文學(xué)(2016年2期)2017-01-15 14:03:59
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
土木建筑工程信息技術(shù)(2013年2期)2013-10-17 03:14:12