通信時延下無人機群集系統(tǒng)分群控制算法
2022-04-21 07:50:10李成鳳劉勝軍張弘強沈家豪
無線電工程 2022年4期
關(guān)鍵詞:信息
李成鳳,劉勝軍,張弘強,沈家豪,武 凡
(綏化學(xué)院 電氣工程學(xué)院,黑龍江 綏化 152001)
0 引言
近年來,無人機群集系統(tǒng)的協(xié)同控制已成為無人機研究領(lǐng)域的熱點問題之一[1-4]。通常,群集系統(tǒng)的協(xié)同行為分為組群和分群2種形式[5],其中,組群表現(xiàn)為隨機分布于某一區(qū)域內(nèi)的UAV聚集成有序化單一群體協(xié)同運動,而分群表現(xiàn)為群集系統(tǒng)在各類分群誘因作用下分裂成若干子群的行為。
目前,組群方面已取得了豐碩的研究成果[6-9],而分群研究尚處于初步開展階段,并主要集中于分群建模、分群可控性(子群數(shù)量、規(guī)模和速度等可控)和考慮實際信息約束的分群控制等方面[5]。文獻[10-11]利用個體異構(gòu)性實現(xiàn)分群,但子群需事先劃分且無法擴展至同構(gòu)系統(tǒng)。文獻[12-13]利用固定時間穩(wěn)定定理和結(jié)構(gòu)平衡符號圖理論,基于合作對抗網(wǎng)絡(luò)實現(xiàn)了固定時間二分群,即分裂成速度大小相同、方向相反的2個子群。文獻[14-15]提出了基于信息耦合度的自組織分群控制算法,但僅實現(xiàn)了對稱刺激下等規(guī)模分群。文獻[16]研究了基于等級C-S模型的多分群,但需內(nèi)部作用參數(shù)滿足條件且初始位置和速度滿足有序關(guān)系才能實現(xiàn)分群。文獻[17-18]基于多個虛擬領(lǐng)導(dǎo)者實現(xiàn)了滿足子群規(guī)模需求和子群速度可控的多分群,但均僅限于子群期望速度恒定情況。此外,文獻[17]中的分群策略不僅需要智能體與領(lǐng)導(dǎo)者的距離、領(lǐng)導(dǎo)者對應(yīng)的子群規(guī)模,還需獲得全局個體的子群選擇信息;文獻[18]除需領(lǐng)導(dǎo)者到智能體的單向通信,還需鄰居智能體之間通信,才能實現(xiàn)滿足要求的分群,且分群時過多破壞了群體的穩(wěn)定結(jié)構(gòu),導(dǎo)致形成穩(wěn)定子群所需時間較長。文獻[19]研究了實際信息約束下群集系統(tǒng)分群問題,在忽略傳感器探測時延而僅考慮通信時延的前提下,通過信息耦合度調(diào)節(jié)個體運動趨向性,并設(shè)計通信時延下的協(xié)同分群控制律,實現(xiàn)了外部刺激下的自發(fā)分裂,但仍局限于對稱刺激下速度不可控的等規(guī)模分群。
針對上述分群控制研究中存在的問題,設(shè)計了一種通信時延下UAV群集系統(tǒng)分群控制算法。利用UAV自身位置信息和存在通信時延的期望子群規(guī)模和群目標運動信息,基于蟻群算法概率公式設(shè)計分群策略,以此實現(xiàn)子群數(shù)量和規(guī)模滿足任務(wù)需求、群體結(jié)構(gòu)和速度調(diào)整較小的分群;在此基礎(chǔ)上將存在通信時延的群目標位置、速度和加速度信息融入?yún)f(xié)同分群控制律中,實現(xiàn)了通信時延下子群速度動態(tài)可控的分群運動,并通過理論分析和仿真實驗驗證了算法的穩(wěn)定性和有效性。
1 UAV群集系統(tǒng)模型建立
1.1 UAV群集系統(tǒng)動力學(xué)模型
考慮二維水平空間中運動的UAV群集系統(tǒng),群體中有N個無差別UAV和K(t)個群目標。UAVi的動力學(xué)模型為:
(1)
式中,xi,vi,ui∈R2分別為UAVi的位置、速度和控制輸入。群目標k的動力學(xué)模型為:
(2)
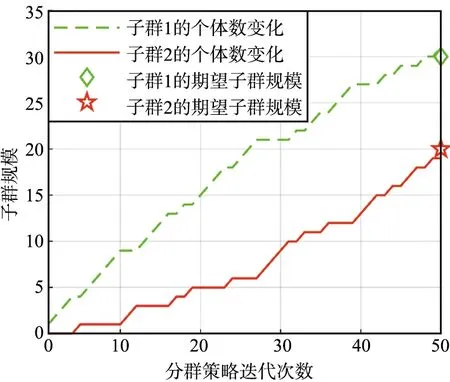
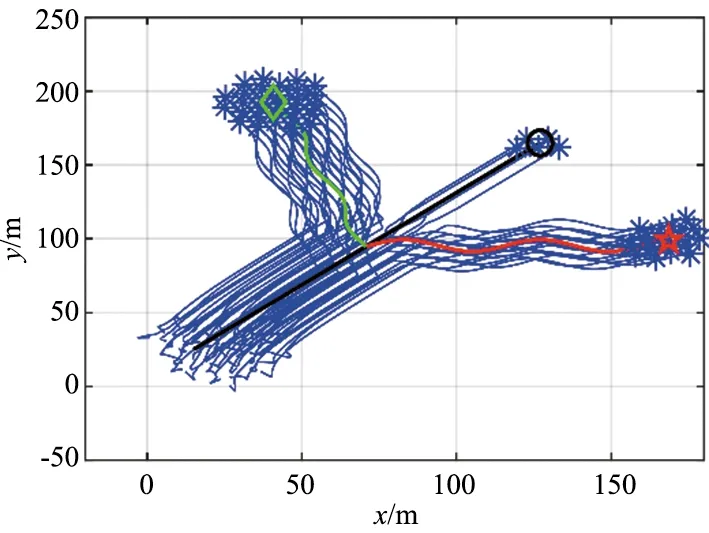
式中,xtk,vtk,ftk∈R2分別為群目標k的位置、速度和控制輸入量。每個群目標均對應(yīng)于一個子群,群目標數(shù)量、速度等參數(shù)設(shè)置取決于實際任務(wù)要求。當任務(wù)要求群集系統(tǒng)進行組群運動時,K(t)=1;當任務(wù)要求系統(tǒng)產(chǎn)生分群行為時,1 群集系統(tǒng)的信息交互網(wǎng)絡(luò)由傳感器探測網(wǎng)絡(luò)和通信網(wǎng)絡(luò)組成,其中傳感器探測網(wǎng)絡(luò)用于UAV間的位置和速度信息交互,通信網(wǎng)絡(luò)用于群目標到UAV的單向通信。 傳感器探測網(wǎng)絡(luò)中UAVi的鄰居集可定義為: Ni={j:‖xj-xi‖ (3) 式中,‖xj-xi‖為UAVi和j之間的歐式距離,簡記為‖xji‖。當群集穩(wěn)定時,鄰居個體之間的距離為期望間距de。按個體所選擇群目標是否相同,鄰居集還可以表示為: (4) 基于上述模型,設(shè)計分群控制算法滿足如下條件:① 可控分群,即群集系統(tǒng)分裂出的子群數(shù)量、規(guī)模和速度應(yīng)基本滿足任務(wù)需求;② 就近分群,即在優(yōu)先滿足子群規(guī)模需求前提下盡量不過多打亂已穩(wěn)定的鄰居結(jié)構(gòu),避免分群過程中過大的結(jié)構(gòu)和速度調(diào)整,減少子群結(jié)構(gòu)穩(wěn)定和速度協(xié)同所需時間;③ 基于局部信息和任務(wù)信息分群,即每個UAV僅能獲取自身及周圍鄰居的運動信息及單向通信所得存在時延的任務(wù)信息,不能獲取全局UAV的信息,即不具備個體間通信和個體到群目標的通信;④ 協(xié)同分群,即沒有集中分配和分布式協(xié)商,每個UAV依據(jù)自身位置信息及單向通信所得存在時延的任務(wù)信息進行自主分群決策。 在傳統(tǒng)蟻群算法中,螞蟻在路徑選擇過程中依據(jù)信息素濃度和啟發(fā)信息選擇下一步前進方向,選擇概率為: (5) 由于群集系統(tǒng)分群時UAV選擇群目標即加入對應(yīng)子群的過程與蟻群選擇路徑過程相似,故借鑒式(5),利用個體自身位置信息和存在通信時延的任務(wù)信息設(shè)計出滿足子群數(shù)量和規(guī)模需求且結(jié)構(gòu)和速度調(diào)整較小的分群策略,群目標選擇概率為: (6) 式中,Pi,k(t)為t時刻UAVi選擇群目標k的概率;K(t-τ)為t時刻UAV接收到有通信時延的期望子群個數(shù);τk(t-τ)為t時刻UAV接收到有通信時延的子群k期望規(guī)模,該子群規(guī)模項對應(yīng)于式(5)的信息素濃度項,實現(xiàn)按規(guī)模需求分群;ηi,k(t-τ)=a1/dik(t-τ)+a2/θik(t-τ)為結(jié)構(gòu)調(diào)整項,對應(yīng)于式(5)的啟發(fā)信息項,用于實現(xiàn)結(jié)構(gòu)和速度調(diào)整較小的分群;dik(t-τ)為UAVi當前時刻的位置xi(t)與存在通信時延的群目標k的位置xtk(t-τ)之間的歐式距離;θik(t-τ)為UAVi相對于群目標k存在時延的航向的方位,即UAVi與群目標k存在通信時延的相對位置向量與群目標速度vtk(t-τ)之間的夾角,當群目標位置不重合時,a1=1,a2=0,當目標位置重合時,a1=0,a2=1;α和β與式(5)中的相應(yīng)參數(shù)含義相同,分別體現(xiàn)子群規(guī)模項和結(jié)構(gòu)調(diào)整項的重要程度。 在群目標數(shù)大于1時,UAVi按照式(6)計算選擇概率并利用輪盤賭選擇法來確定加入群目標所對應(yīng)的子群,具體步驟如下: 步驟1:S=0,k=1,r=random(0,1); 步驟2:按照式(6)計算Pi,k(t); 步驟3:計算累積概率S=S+Pi,k(t); 步驟4:若r 步驟5:否則,k=k+1,轉(zhuǎn)到步驟2。 由所設(shè)計的分群策略可知,在進行分群時,每個UAV僅利用了自身當前時刻的位置信息和單向通信所得存在時延的子群信息,不需集中分配或分布式協(xié)商,也不需UAV之間通信或UAV向群目標返回任何信息,即可實現(xiàn)滿足子群數(shù)量、規(guī)模需求且結(jié)構(gòu)和速度調(diào)整較小的分群效果。 由于不考慮傳感器探測時延,僅考慮通信時延,故僅是廣播的信息存在時延,其余信息無延時。根據(jù)所設(shè)計的基于蟻群算法的協(xié)同分群策略設(shè)計速度動態(tài)可控的分群控制律為: (7) 可見,控制器包含3個組成部分,其中: (8) 式中,fr(‖xji‖)為同子群鄰居個體距離過近時的排斥函數(shù);fa(‖xji‖)為同子群鄰居個體距離過遠時的吸引函數(shù);f′r(‖xji‖)為不同子群鄰居個體間的排斥函數(shù)。 定理:對于式(1)所描述的UAV群集系統(tǒng),假設(shè)通信時延均為定常時延τ,系統(tǒng)初始能量為一個有限值,則在控制輸入式(7)的作用下,可以得到如下結(jié)論:① 各子群能夠漸近地形成穩(wěn)定群集;② 各子群中所有UAV的速度動態(tài)可控;③ 當子群穩(wěn)定時,其中任意2個不同UAV的間距保持恒定;④ 群集過程中,所有UAV之間不發(fā)生碰撞。 針對子群k,定義系統(tǒng)的能量為: (9) 對式(9)求時間的導(dǎo)數(shù)可得: (10) (11) (12) Ω={(xij,vi)|Qk(t)≤Qk(0)}, (13) 根據(jù)LaSalle不變性原理可確定子群k中的所有UAV起始于Ω的軌跡將會收斂于最大不變集: (14) 由式(12)可以得出: (15) vi=vtk(t-τ),i=1,2,…,τk。 (16) 由此可知,在存在通信時延情況下,子群的速度仍能受速度時變的群目標控制且漸近一致,若群目標速度恒定時,vi=vtk(t-τ)=vtk,結(jié)論②得證。 子群k中任2個UAVj和i間的距離平方為: (17) 對式(17)求時間的導(dǎo)數(shù)可以得出: (18) 由式(16)可知vj=vi=vtk(t-τ),故d‖xji‖2/dt=0,進而可得‖xji‖為恒定值,結(jié)論③得證。 結(jié)論④可通過反證法證明。假設(shè)整個群集運動過程中,在t1時至少有2個UAV發(fā)生碰撞,則: 即Q(0)>Q(t1)≥F(0),這一結(jié)論與定理中系統(tǒng)初始能量Q(0) 為驗證本文所設(shè)計的通信時延下UAV群集系統(tǒng)分群控制方法的可行性和有效性,選取50個UAV組成的群集系統(tǒng)在Matlab下進行仿真實驗。在仿真實驗中,分別考慮了群目標位置重合和不重合且群目標速度、期望子群規(guī)模均不同的2個分群任務(wù)。 分群任務(wù)1參數(shù)設(shè)置:初始狀態(tài)下UAV隨機分布在40 m×40 m內(nèi),初始速度大小隨機分布在0~1 m/s內(nèi),探測半徑R=8.4 m,通信時延τ=0.2 s,期望間距de=7 m,仿真時間28 s,步長為0.02 s。因本文主要研究群集系統(tǒng)完成組群后如何進行協(xié)同分群,故仿真中的分群時刻可以是組群完成后的任意時刻,按此原則可設(shè)置分群任務(wù)為在[0,14)s時,群體中僅有群目標1,群集系統(tǒng)先進行組群,從14 s開始,群體中有2個群目標,群集系統(tǒng)進行分群。組群時,群目標1的初始位置在40 m×40 m矩形區(qū)域內(nèi)隨機給定,期望的群體速度為vt1=[4,5]Tm/s;分群時,2個群目標速度分別為vt1=[2sin(t),6]m/s,vt2=[7,-1+2sin(t)]Tm/s,在保證速度方向不交叉前提下,初始位置在距離原群目標1當前位置40 m范圍內(nèi)不重合地隨機給定,子群期望規(guī)模在滿足總和為50條件下隨機給定。α=6,β=5,令dji=‖xji‖-de,Rji=‖xji‖-R,參考文獻[16]選擇相互作用力: 此外,為進一步判斷群體是否已形成穩(wěn)定結(jié)構(gòu)以及分群中的結(jié)構(gòu)調(diào)整大小,建立結(jié)構(gòu)勢能函數(shù)為: 任務(wù)1的仿真結(jié)果如圖1~圖4所示。 圖1 子群規(guī)模變化曲線(任務(wù)1) 由圖1可以看出,分裂的子群規(guī)模分別為31和19,基本滿足期望規(guī)模30和20的要求,即個體只需根據(jù)單向通信所得有時延的任務(wù)信息及自身位置信息,按照所設(shè)計的基于蟻群算法的分群策略,就能夠?qū)崿F(xiàn)滿足子群規(guī)模需求的分群,而不需要集中分配、分布式協(xié)商或額外增加個體間的通信能力。 圖2中藍線為群體運動軌跡,黑線為組群時群目標1的軌跡,紅線、綠線分別為分群時群目標1和2的軌跡,“*”為UAV終點,“◇”和“☆”分別為群目標1和2的終點。 圖2 群體運行軌跡(任務(wù)1) 由圖2可以看出,群體在最初一個群目標1的導(dǎo)航作用下完成了組群,在群目標1消失并出現(xiàn)另外2個群目標后完成了協(xié)同分群。 圖3中藍線為UAV速度分量曲線,黑線為組群時群目標1的速度分量曲線,綠線和紅線分別為分群時群目標1和2的速度分量曲線。 (a)x軸方向 由圖中可以看出,在有通信時延的情況下,組群時群體的速度最終收斂至群目標1的恒定速度;分群時,雖然由于通信時延導(dǎo)致分群響應(yīng)時間滯后了0.2 s,但2個子群中個體速度最終仍趨近于各自對應(yīng)的群目標時變速度,且分群時群體速度調(diào)整較小。 圖4中“◇”和“☆”分別為群目標1和2的位置,“○”為UAV位置,其中連線表示UAV的鄰居關(guān)系。 (a)14 s 由圖4可以看出,14 s時群體已經(jīng)處于組群后的穩(wěn)定群集結(jié)構(gòu),并出現(xiàn)2個群目標引導(dǎo)分群,14.6 s時有少量個體相互分離,15 s時有更多個體相互分離,15.6 s時群體分裂完成,形成跟隨不同群目標的2個子群;從分群過程中群體結(jié)構(gòu)變化可以看出,在設(shè)計的基于蟻群算法的協(xié)同分群控制作用下,實現(xiàn)了按2個群目標的期望子群規(guī)模就近分群,而沒有過多地打亂已穩(wěn)定的鄰居結(jié)構(gòu)。 分群任務(wù)1的群體結(jié)構(gòu)能量圖如圖5所示。 圖5 群體結(jié)構(gòu)能量圖(任務(wù)1) 由圖5可以看出,在0~14 s時,群體結(jié)構(gòu)能量在逐漸減小并在8 s時達到穩(wěn)定狀態(tài),即此時所有個體在一個群目標的導(dǎo)航作用下,形成了期望的穩(wěn)定群集結(jié)構(gòu);在14 s時開始的分群過程中,群體結(jié)構(gòu)能量并未出現(xiàn)突增,由此進一步說明所設(shè)計的協(xié)同分群策略可避免分群過程中過大的群體結(jié)構(gòu)調(diào)整;22 s時,群體結(jié)構(gòu)能量達到穩(wěn)定狀態(tài),即在所設(shè)計的基于蟻群算法的協(xié)同分群控制器作用下,使各個子群均形成期望的穩(wěn)定群體結(jié)構(gòu)。 為進一步驗證算法的有效性,進行了分群任務(wù)2的仿真實驗。任務(wù)2參數(shù)設(shè)置:組群時,群目標1的速度為vt1=[5,4]Tm/s;分群時,期望子群數(shù)量為3個,期望子群規(guī)模分別為5,15,30個,群目標1保持原有運動規(guī)律,群目標2和3的初始位置與群目標1當前位置重合,速度分別為vt1=[2-2sin(t),7]Tm/s,vt2=[7,4sin(t)]Tm/s,其余參數(shù)設(shè)置同分群任務(wù)1。這里只給出群體運行軌跡、速度收斂曲線和群體結(jié)構(gòu)能量圖,分群任務(wù)2的實驗結(jié)果如圖6~圖8所示。 圖6 群體運行軌跡(任務(wù)2) (a)x軸方向 圖8 群體結(jié)構(gòu)能量圖(任務(wù)2) 從結(jié)果可知,雖然分群時群目標的數(shù)量、位置、速度及子群期望規(guī)模均發(fā)生了改變,但在通信時延下,按設(shè)計的基于蟻群算法的分群控制算法仍能使群集系統(tǒng)實現(xiàn)子群數(shù)量、規(guī)模和速度均可控且結(jié)構(gòu)和速度調(diào)整較小的分群效果。 本文研究了通信時延下UAV群集系統(tǒng)分群控制問題,設(shè)計了一種基于蟻群算法的協(xié)同分群控制算法。該算法僅利用有通信時延的任務(wù)信息及自身位置信息設(shè)計分群策略,實現(xiàn)了滿足期望子群數(shù)量和規(guī)模需求的分群;通過在分群選擇式(9)中引入結(jié)構(gòu)調(diào)整項,避免了分群過程中過大的群體結(jié)構(gòu)和速度調(diào)整,加快了子群結(jié)構(gòu)穩(wěn)定和速度協(xié)同過程;在有通信時延的信息約束下,通過在分群控制算法中融入存在通信時延的群目標運動信息,使群集系統(tǒng)能夠根據(jù)任務(wù)需要進行協(xié)同分群,形成穩(wěn)定且速度動態(tài)可控的子群。理論分析和實驗結(jié)果表明,在通信時延約束下,所設(shè)計算法能夠使群集系統(tǒng)實現(xiàn)結(jié)構(gòu)和速度調(diào)整較小的可控分群運動。1.2 UAV群集系統(tǒng)信息交互模型


2 通信時延下的分群控制算法
2.1 通信時延下基于蟻群算法的分群策略

2.2 通信時延下基于蟻群算法的分群控制算法


2.3 穩(wěn)定性分析






3 仿真實驗






4 結(jié)束語
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31中外會展(2014年4期)2014-11-27 07:46:46大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14祝您健康(1987年3期)1987-12-30 09:52:32