雷暴天氣下的儀表進近航段航線規劃研究
2022-04-24 08:18:30魯力劉晨宇
航空工程進展 2022年2期
魯力,劉晨宇
(中國民用航空飛行學院空中交通管理學院,廣漢618307)
0 引言
近年來隨著我國經濟的快速發展,民航旅客人數大幅上漲,如何安全高效地進行商載運行成為當前民航業發展的關鍵。飛機進近過程中,高度降低,容易遭受雷暴的威脅。雷暴會產生劇烈的上升氣流與下降氣流,飛入其中會對飛機結構造成嚴重破壞;雷暴內部含有大量過冷水,會造成飛機積冰進而影響飛機著陸;氣流碰撞產生電擊,會對機身突出部位和電子設備造成損壞。因此對進近航段的雷暴天氣航線規劃具有重要意義。
近年來,將路徑規劃用于民用航空方面的研究主要有:疏利生等在Tkinter 場面仿真的基礎上,采用Q-learning 算法進行靜態路徑規劃;侯盼盼等通過分時段的滑行沖突預測,為路徑規劃提供依據;陳亞青等采用配對進近模式進行路徑規劃,提高了機場的運行效率;劉鵬飛針對飛行規則及限制建立非線性規劃模型,并通過求解模型進行無人機的路徑規劃。以上研究多以靜態環境進行路徑規劃。
而在雷暴天氣下的民用航空器航線規劃屬于動態環境路徑規劃,目前該領域的研究主要有:向征等針對雷暴天氣下的多航空器之間的沖突避讓問題,首次提出以人工勢場法為基礎的蟻群算法進行路徑規劃;呂宗平等針對超級單體雷暴建立了飛行限制區,并根據其各個頂點的移動建立了危險天氣模型,采用目標規劃進行了改航路徑的規劃;J. Pannequin 等針對強對流天氣下航空器的沖突問題,提出了一種基于非線性的模型來規劃航跡的方法。以上研究大多將雷暴天氣視為靜態障礙物,缺乏時效性及實用性,或者針對雷暴天氣建立了動態環境,但求解過于復雜。
本文在上述研究的基礎上,將改進的動態窗口算法(DWA)用于動態的雷暴天氣中,對進近飛機的航跡進行仿真與規劃,并結合實例,驗證該算法的可靠性與實用性。
1 模型的建立與仿真
1.1 飛機運動模型的建立
1.1.1 飛機運動方程
飛機在進近航段,飛機高度上調不便于沿最佳下滑梯度進近,高度下調有接地風險。由于調配高度要求較為嚴格,飛機在進近航段多采用繞飛措施規避雷暴。
因此飛機在進近航段運動軌跡可描述為
V=(v,ω) (1)
式中:V為時刻飛機軌跡集合;v為時刻飛機線速度;ω為飛機角速度。
描述飛機軌跡時,飛機飛行模型如圖1 所示。

圖1 飛機飛行模型圖Fig.1 Aircraft flight model diagram
兩個相鄰時刻間距足夠小時,可將該段運動軌跡視為直線飛行,投影在坐標系中可以表達為
因此,飛機某時刻坐標及飛機偏航角可表示為

1.1.2 飛機運動參數
由于在二維空間中存在無窮多組速度,而現實中由于飛機自身因素及雷暴的影響,可以通過以下限制,對速度進行一定約束。
(1)保證自身性能下的速度限制:V={∈[,],∈[,]} (4)
(2)飛機受自身發動機性能的限制:

式中:v、ω為飛機在-1 時刻所能提供的最大制動線加速度與角加速度;v、ω為飛機在-1 時刻所能提供的最大驅動線加速度與角加速度。
(3)基于飛機與雷暴之間的距離限制:
為了避免遇到即將出現在航線上的雷暴,飛機將以最大制動加速度減速,即

式中:為-1 時刻飛機距雷暴的最小距離。
1.1.3 飛機速度評價函數
(1)評價函數指標的建立
飛機的速度評價指標主要由三個指標決定如表1 所示。設定為圓形軌跡。具體算法流程如圖2 所示,參數如表2 所示。

表1 飛行速度評價指標表Table 1 Flight speed evaluation index table
(2)指標的歸一化處理
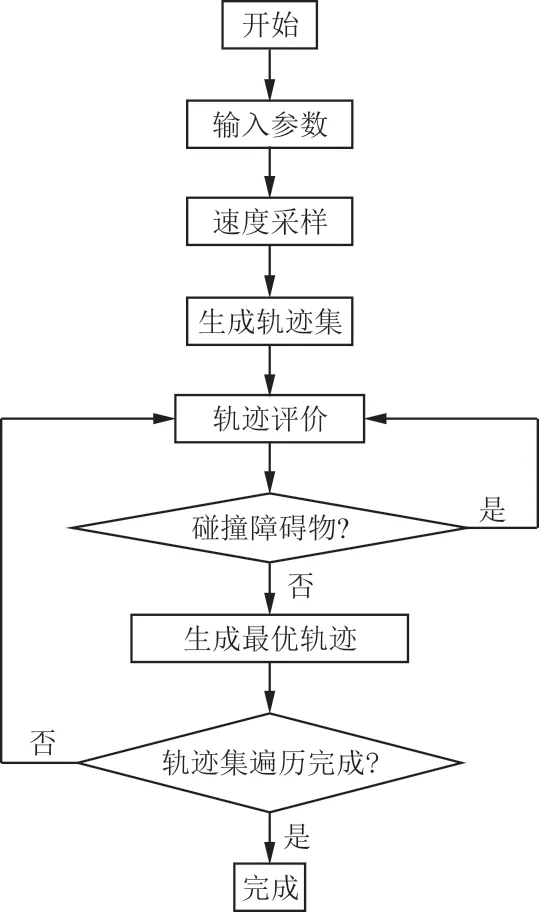
圖2 動態窗口算法流程圖Fig.2 Flow chart of dynamic window algorithm
由于三個指標是不同量綱,因此對其進行歸一化處理,公式如下:式中:()為當前動態窗口算法下軌跡的指標;為當前動態窗下所有軌跡。
(3)速度評價函數
在已有的評價指標基礎上設定比重建立綜合評價函數:
(,) =++(8)
式中:、、分別為航向角、安全距離、速度比例系數,考慮本文主要以與雷暴云安全距離為主要評價指標,因此設定=0.3、=0.4、=0.3。
1.2 Matlab 模型仿真
根據所建立的飛機運動模型,利用Matlab 進行仿真模擬,觀測飛機為躲避雷暴規劃路線是否合理。關于雷暴的形狀設定為圓團狀雷暴(即在仿真過程中以相鄰四點組成移動障礙物),其軌跡模擬結果如圖3 所示。
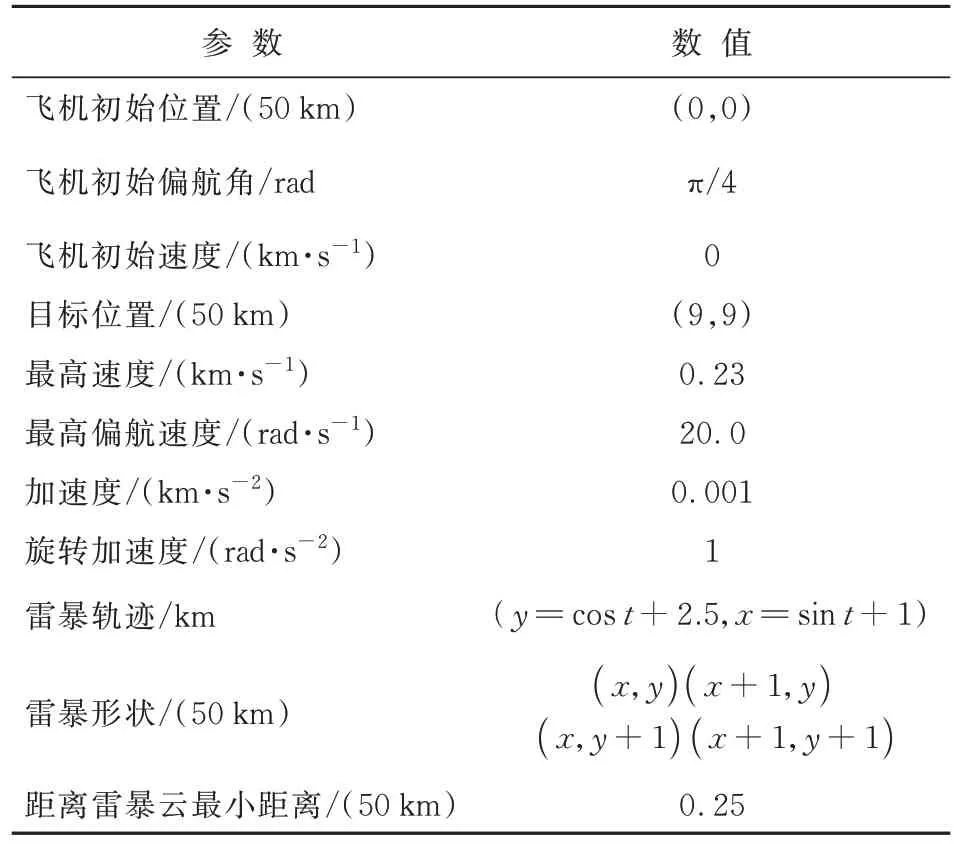
表2 初始仿真參數表Table 2 Initial simulation parameter table
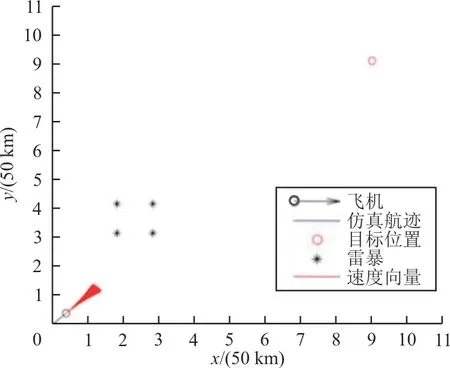

圖3 飛機躲避雷暴改航路線模擬仿真Fig.3 Simulation of flight diversion route for aircraft avoiding thunderstorm
從圖3 可以看出:該模型中雷暴中心以(2,2.5)為圓心,100 km 為半徑的圓形區域范圍內運動。飛機以初始航行角π/4 進行飛行,飛行過程中成功避開運動的雷暴。
2 航班實例驗證
本文以2021 年1 月20 日CZ6428 航班在執行武漢—合肥—臨沂飛行任務為例。
CZ6428 航班在經過合肥經停前執行進近程序,原計劃飛行路線會與雷暴相遇。因此,通過該案例,生成其雷暴與時間相關的位移參數方程結合DWA 模型進行進近航段雷暴天氣下航線規劃仿真。
2.1 雷暴位移參數方程的建立
通過對不同時間合肥新橋機場上空氣象雷達回波圖(雷達回波圖中,雷暴云呈紅色顯示)的觀測(如圖4 所示),雷暴由西南方向向合肥新橋機場上空移動,通過圖形軟件對90 min 內氣象回波雷達顯示的雷暴位移圖片進行疊加,得到雷暴位移軌跡如圖5 所示。
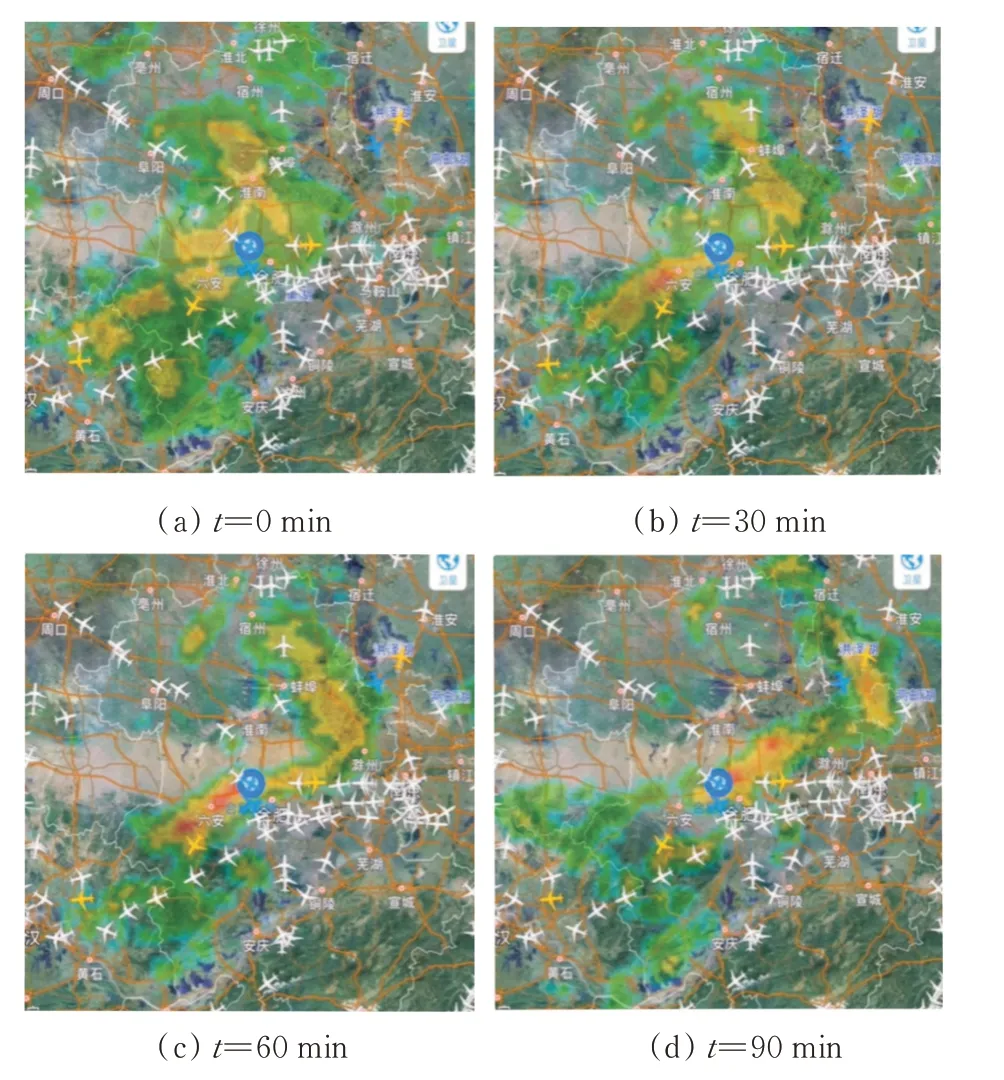
圖4 雷暴各時間點位置圖(紅色區域)Fig.4 Location map of thunderstorm at each time point(red area)

圖5 雷暴運動軌跡圖Fig.5 Thunderstorm trajectory
為擬合雷暴運動軌跡方程,本文以武漢天河機場為原點,正東方向為軸,正北方向為軸建立直角坐標系得到雷暴位移模型如圖6 所示。
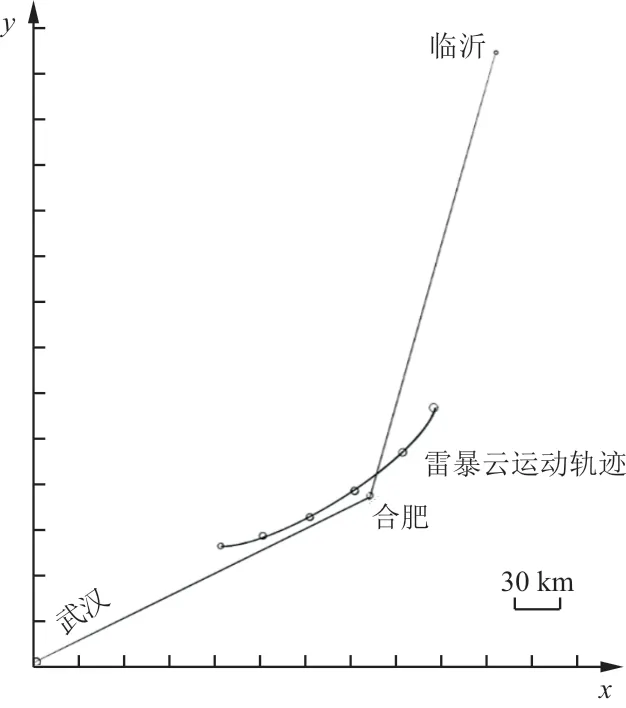
圖6 飛行模型圖Fig.6 Flight movement model diagram
通過模型圖對雷暴運動軌跡圖可發現雷暴運動軌跡是一條曲線,采用多項式回歸擬合來獲得雷暴運動軌跡參數方程,各時刻雷暴坐標如表3所示。
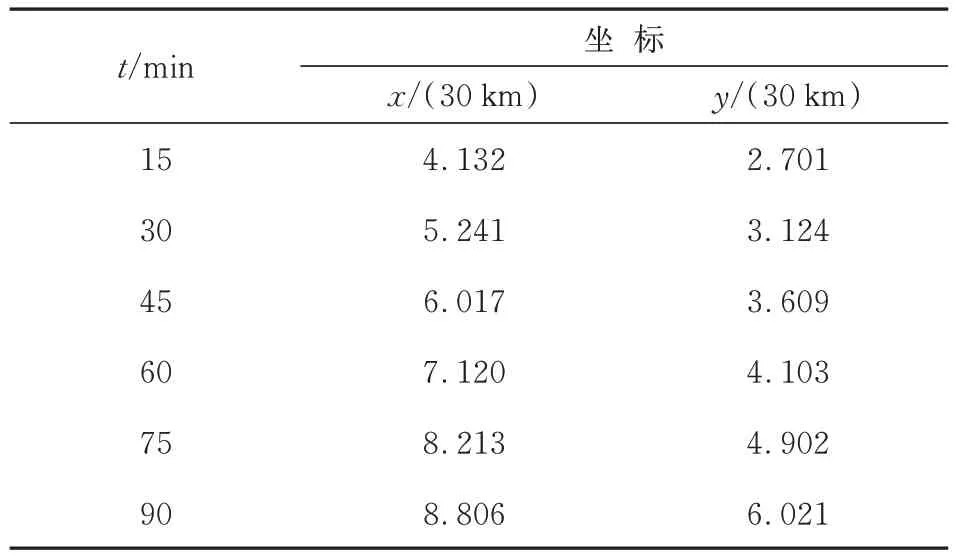
表3 雷暴時刻坐標表Table 3 Thunderstorm time table

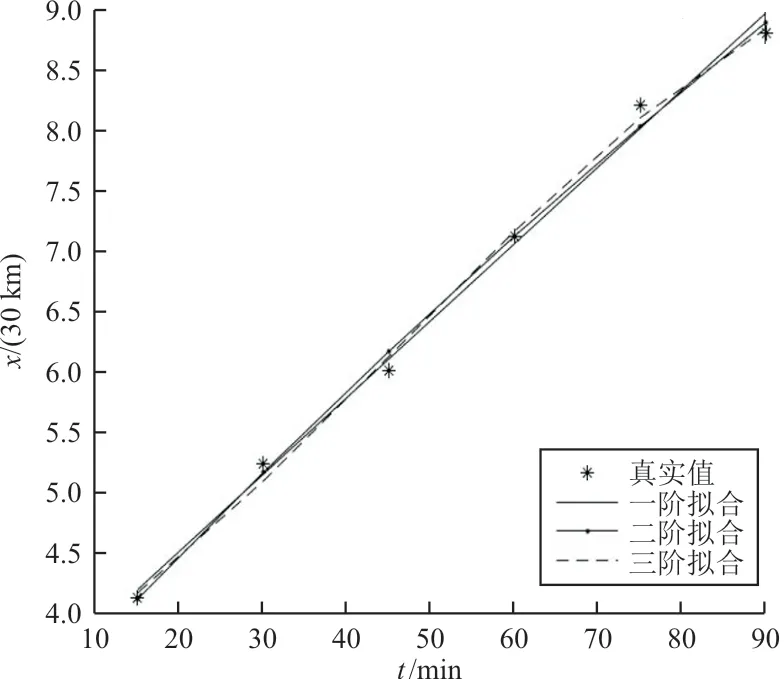
圖7 雷暴x坐標1 到3 階擬合圖Fig.7 Thunderstormx-coordinate 1~3 order fitting diagram
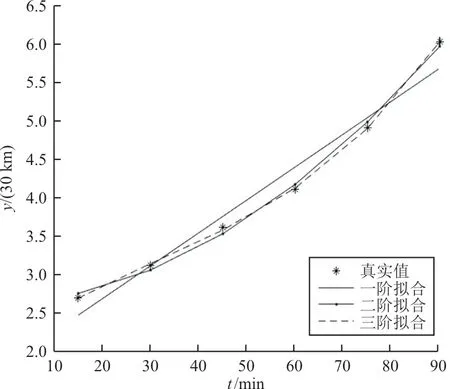
圖8 雷暴y坐標1 到3 階擬合圖Fig.8 Thunderstormy-coordinate 1~3 order fitting diagram
對以上數據進行多項式回歸擬合,擬合公式為擬合結果如圖7~圖8 所示。通過擬合效果對比為避免過擬合現象,坐標采用二階多項式擬合,坐標采用三階多項式擬合作為雷暴的位移軌跡參數方程,參數方程為

2.2 模擬仿真
將各參數及雷暴形狀及位移方程帶入模型通過Matlab 進行仿真,各仿真數據如表4 所示。
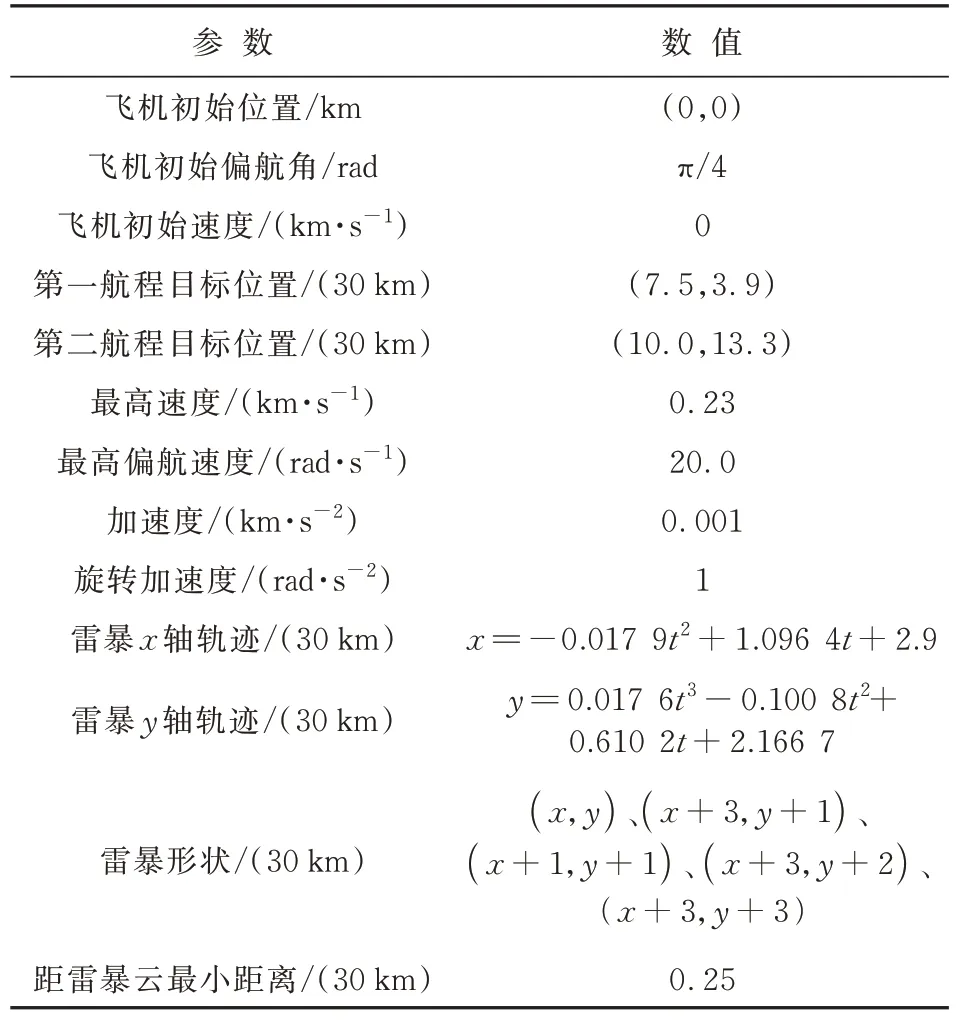
表4 案例仿真參數Table 4 Case simulation parameters
模擬雷暴位置與飛機位置如表5 所示,仿真結果如圖9 所示,運行時間如圖10 所示。
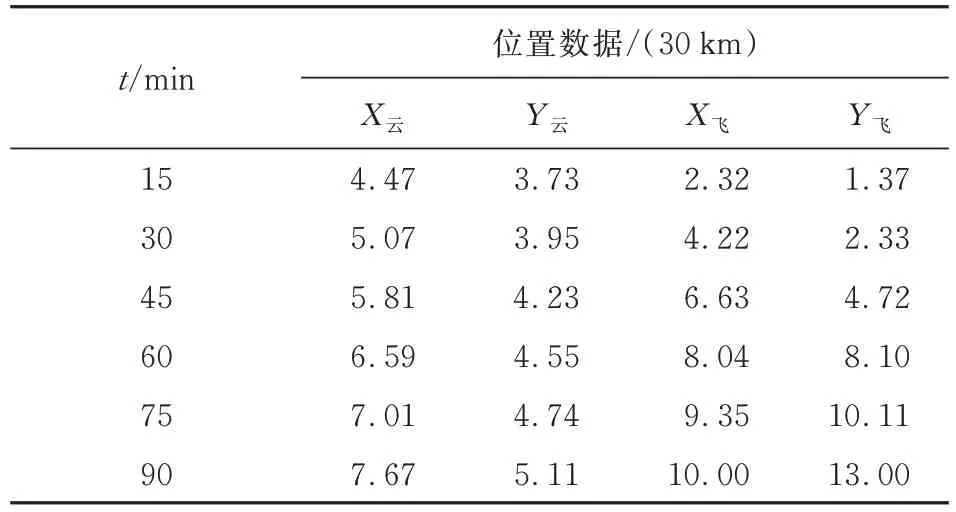
表5 模擬雷暴與飛機位置數據Table 5 The position of thunderstorm simulation and aircraft parameters
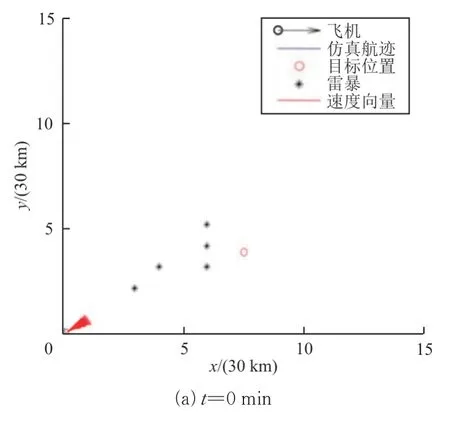
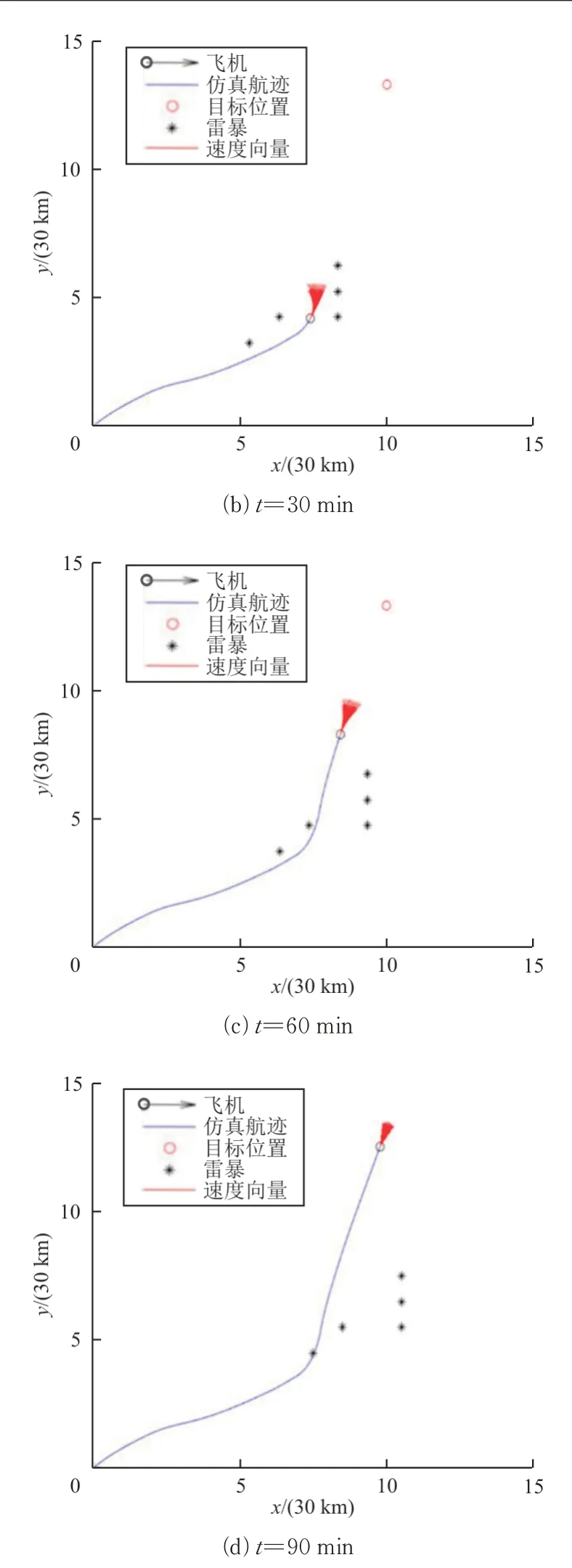
圖9 CZ6428 航班躲開雷暴軌跡仿真動態圖Fig.9 Dynamic simulation of flight cz6428avoiding thunderstorm
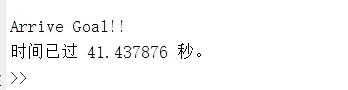
圖10 仿真程序執行時間Fig.10 Execution time of simulation program
從圖9 可以看出:飛機從武漢至合肥經停,后從合肥至臨沂的過程仿真中,生成安全且高效的航線,仿真改航航跡與實際改航航跡如圖11 所示(紫色為實際運動軌跡,藍色為仿真軌跡)。

圖11 仿真航線與實際航線對比圖Fig.11 Comparison chart of simulated route and actual route
2.3 模型可靠性驗證
(1)可靠性驗證
為驗證模型仿真結果的可靠性,本文采取對兩軌跡圖通過Plot_digitizer 提取軌跡點數據進行余弦相似系數分析,軌跡圖如圖12 所示,軌跡點數據如表6 所示。
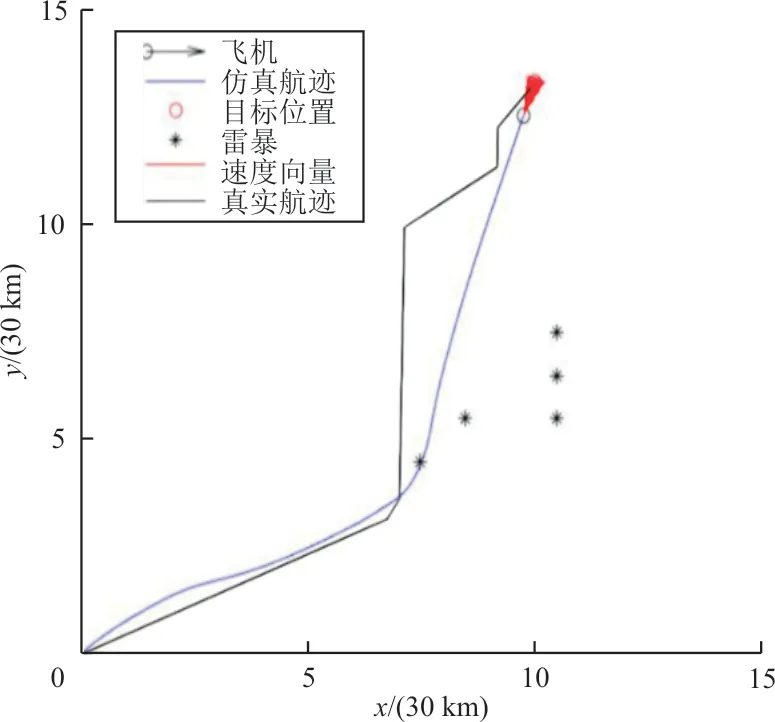
圖12 仿真與實際軌跡相似度計算圖Fig.12 Simulation and actual trajectory similarity calculation chart

表6 模擬航線與真實航線軌跡點Table 6 The position data of simulated route and actual route
余弦相似系數公式為

式中:為坐標點向量夾角;為模擬軌跡數據向量;B為實際飛行軌跡點數據,實際飛行數據來自于管制人員對飛機在遭遇雷暴前做的決策引導;0 ≤≤1,值越 接近1 說明 兩個 軌跡 擬合 度越高。
通過計算得出最終結果=0.994 7,=5.89°。
根據計算出的和數值,驗證仿真軌跡與實際軌跡具有較高相似性,從而說明當雷暴天氣下飛機在進近過程中可以采取本文算法提前給飛機做引導,進而也驗證了本文所采用的算法模型具有可靠性。
(2)經濟性驗證
根據表6 數據對模擬航線進行多項式擬合,公
式為
=ax+ax+…++(12)
擬合結果如下:

對其進行積分求長度,公式如下:

根據以上公式對模擬航線距離進行計算可得模擬航線飛行距離較實際航程節省了52.125 6 km,節省了運行時間。
采用本文案例機型,即空客A380 為例,每架飛機的油耗為2.9 L/(100 km),因此該模擬航線可以節省1 091.82 L 燃油,體現了該模型所帶來的經濟性。
(3)實用性分析
近年來,新航線系統不斷完善,其主要包括的衛星導航、通信技術、監視技術和全球一體化的空中交通管理均為該模型提供了實用性的價值,該模型可以通過衛星導航實時精確定位飛機位置,通過通信技術以監視技術,隨時進行信息的傳遞與反饋,通過全球一體化空中交通管理進一步協調雷暴天氣下的多航路調整問題。
3 結論
(1)根據進近航段飛行器高度限制要求,結合DWA 算法本身特點快速、高效的進行飛行仿真,選擇最優路徑。由于DWA 算法是通過不同時刻最優速度的選擇進行路徑規劃,通過時間與雷暴位置坐標擬合,使傳統DWA 方法的固定障礙物路徑規劃,優化為動態障礙物路徑規劃。
(2)通過對雷暴位移軌跡坐標與時間建立參數方程,預測雷暴位移軌跡,預先進行進近航段雷暴天氣下航線規劃,結合新航行系統提高實時性。
(3)DWA 算法與傳統路徑規劃算法相比,它是一個動態選擇的過程,實時選擇當下最優速度,從而得出最優軌跡,有效解決了全局尋優與運算速度的矛盾。
下一步將研究如何通過建立三維空間下的DWA 仿真模型,對全航段進行航線規劃。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
中國衛生(2016年2期)2016-11-12 13:22:16
光學精密工程(2016年6期)2016-11-07 09:07:19
