自動化集裝箱碼頭港外集卡提送箱交互作業模式
2022-11-01 05:35:00吳邵強彭駿駿
水運工程 2022年10期
關鍵詞:作業
吳邵強,梁 浩,彭駿駿
(中交第四航務工程勘察設計院有限公司,廣東 廣州 510290)
公路集疏運是集裝箱港口集疏運系統的重要組成部分,它主要依賴港外集卡的公路運輸實現集裝箱在港口所在地腹地的集散。港外集卡進入集裝箱港區后,須通過與堆場裝卸設備間的交互作業完成提箱或送箱,該作業是集裝箱碼頭主要裝卸生產環節之一。在自動化集裝箱碼頭,為降低港內無人駕駛車輛對進港有人駕駛集卡的安全風險,通常會采取強制隔離措施(如設置物理隔離圍網、安全門禁等)對港外車輛的運行范圍進行管控,以避免兩類車輛運行軌跡出現空間交叉[1]。如何在運行區域嚴格受限的情況下實施港外集卡與堆場裝卸設備的交互作業,一直以來都是集裝箱自動化裝卸工藝系統設計的重難點之一。港外集卡進港提送箱交互作業模式的選擇和工藝方案設計是否合理對集裝箱自動化裝卸系統的運行效率和能耗水平都會產生一定影響。
本文在分析目前自動化集裝箱碼頭常用港外集卡提送箱交互作業模式基礎上,依托廣州港南沙自動化集裝箱碼頭和欽州港自動化集裝箱碼頭,結合各自工程特點,因地制宜地提出“邊裝卸集中交互”和“邊裝卸U形通道交互”兩種新型港外集卡提送箱作業工藝模式,并對不同模式下裝卸工藝平面布置和流程設計要點進行詳細闡述,可為具有類似工程的設計提供參考。
1 自動化集裝箱碼頭港外集卡提送箱交互作業模式現狀
目前,自動化集裝箱碼頭中港外集卡提送箱常見交互作業模式主要包括箱區端部交互作業(簡稱“端裝卸交互作業”)和箱區側邊交互作業(簡稱“邊裝卸交互作業”)兩種。
1.1 箱區端部交互作業模式
港外集卡在自動化集裝箱箱區端部與堆場裝卸設備交互,完成提送箱作業。該模式常見于自動化堆場采用垂直布置形式的全自動化集裝箱裝卸工藝系統,如青島前灣和上海洋山自動化集裝箱碼頭[2]。
自動化集裝箱堆場各箱區陸側端部設港外集卡專用交互作業區,內設一定數量的集卡交互作業車位。自動化箱區與交互作業區之間采用圍網隔離,港外集卡運行范圍被限制在自動化集裝箱堆場后方的港區非自動化區域內。各自動化箱區陸側端配置1臺自動化集裝箱軌道龍門吊,專門用于與港外集卡進行交互作業。港外集卡進港后,行駛至目標箱所在箱區陸側交互作業,倒車進入指定交互作業車位內,并完成與軌道龍門吊間的交互作業[3]。該作業模式典型工藝平面布置及斷面見圖1。
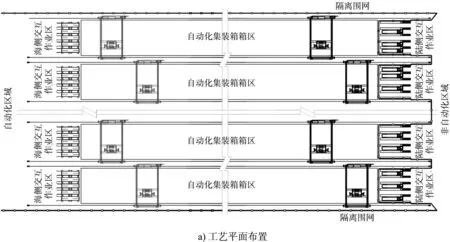

圖1 端裝卸交互作業模式
該模式工藝平面布置和裝卸作業具有以下特點:1)單箱區出箱(或收箱)點受陸側交互作業區港外集卡候工車位布置數量限制,一般為3~5個;2)陸側端集裝箱軌道龍門吊須承擔集裝箱在箱區內部堆碼垛作業和長距離水平運輸作業;3)港外集卡須倒車進入候工車位,以免出現軌道龍門吊帶箱越過港外集卡駕駛室頂部的現象和安全隱患。
1.2 邊裝卸交互作業模式
港外集卡在自動化集裝箱箱區側邊與堆場裝卸設備交互,完成提送箱作業。該作業模式常見于自動化堆場采用平行布置形式的全自動化集裝箱碼頭,如國內的天津北疆C段和日本名古屋自動化集裝箱碼頭。
該作業模式不設置專用的港外集卡交互作業區,港外集卡進港后須行駛到自動化集裝箱堆場目標箱位所在的箱區側邊,完成與堆場自動化裝卸設備的交互作業,任何一個箱區貝位都可成為交互作業點。自動化箱區裝卸作業一般采用自動化懸臂式軌道龍門吊或自動化輪胎龍門吊作業。其中,自動化雙懸臂軌道龍門吊具備利用雙側懸臂分別與港外集卡和港內自動化水平運輸設備進行交互作業,實現兩類車輛在箱區內部隔離分流的優勢,因此雙懸臂軌道龍門吊是邊裝卸交互作業模式下最常用的自動化堆場裝卸設備。自動化集裝箱堆場采用雙懸臂軌道龍門吊時的邊裝卸交互作業模式典型工藝平面布置及斷面見圖2。

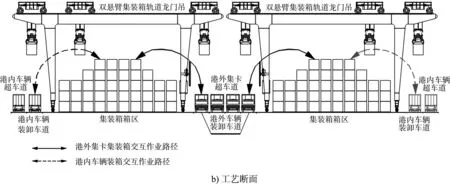
圖2 雙懸臂集裝箱軌道龍門吊的邊裝卸交互作業模式
該模式工藝平面布置和裝卸作業具有以下特點:1)單箱區出箱(或收箱)點多,任何一個箱區貝位均可成為交互作業點;2)集裝箱軌道龍門吊不需要承擔集裝箱在箱區內長距離水平運輸作業,單箱交互作業所需設備能耗低;3)港外集卡與港內車輛運行軌跡存在空間交叉,交通組織復雜。在集裝箱全自動化裝卸系統中,須對港內外車輛交通隔離分流進行重點專項設計。
2 自動化集裝箱碼頭港外集卡提送箱新型交互作業模式
2.1 廣州港南沙自動化集裝箱碼頭
2.1.1工程概況及特點
廣州港南沙自動化集裝箱碼頭,新建4個5萬~10萬噸級集裝箱海輪泊位和12個2 000噸級內河駁船泊位,碼頭預測集裝箱年吞吐量480萬TEU。主要工程特點包括[4]:1)海輪碼頭與駁船碼頭布置在非直線岸線上,整體呈側面相鄰形態;2)集裝箱集疏運以“江海聯運”為主,公路集疏運為輔。公路集疏運集裝箱運量較低,僅約60萬TEU/a。
為適應集裝箱在港內的主要工藝流向為平行于海輪碼頭岸線的工程特點[5],碼頭采用了“自動化堆場平行布置+自動化水平運輸采用智能導引車(IGV)”的全自動化總體技術路線。
2.1.2港外集卡交互作業工藝方案設計
廣州港南沙自動化集裝箱碼頭采用平行布置,若港外集卡提送箱采用常規邊裝卸交互作業模式,將存在以下問題:1)港內外車輛運行軌跡無法實現完全意義上的空間隔離,港外集卡對集裝箱自動化裝卸系統運行的干擾和自動化水平運輸設備對港外集卡的安全威脅都無法完全規避;2)港區自動化區域內部交通組織困難,車輛運行安全風險較大。
綜合上述因素,在充分利用公路集疏運集裝箱年運量低的特點基礎上,提出一種“邊裝卸集中交互”的新型港外集卡提送箱工藝模式。該作業模式工藝平面布置及斷面見圖3。


圖3 邊裝卸集中交互作業模式
自動化集裝箱堆場后方設置獨立的港內外集中交互作業區,內設1條平行布置的中轉箱區,箱區內部采用具備自動化和遠程操控自由切換功能的自動化雙懸臂集裝箱軌道龍門吊作業,軌道吊陸側懸臂下設置港外集卡專用交互作業車道和超車道。陸側軌與港外集卡交互作業車道之間采用圍網隔離,港外集卡運行范圍被限制在軌道吊陸側懸臂下的非自動化區域內。港外集卡進港后,行駛到中轉箱區側邊、雙懸臂軌道龍門吊陸側懸臂下方的目標箱位貝位處,等待和完成與雙懸臂軌道龍門吊的交互作業。
結合碼頭陸域條件限制,港內外集中交互作業區中轉箱區設計長度約1 212 m,含地面箱位1 870 TEU,最大堆箱容量9 350 TEU(最大堆箱高度為5層),箱區內采用重(冷藏)、空箱混堆。根據公路集疏運集裝箱運量和軌道龍門吊的作業效率測算,中轉箱區雙懸臂軌道龍門吊采用近期配3臺、遠期增配3臺的分期配置策略,滿足公路集疏運集裝箱量逐年上升的需求。
在港外集卡提送箱業務中,客戶通過業務預約系統提前向港口報備目標箱信息、集卡信息及提送時間等重要資料,港口收到預約信息后將根據預約時間制定高效的目標箱港內轉運計劃和交互作業計劃。
該模式在充分利用碼頭公路集疏運集裝箱運量低、集中交互作業中轉堆場規模不大等特點的基礎上,通過設置港外集中交互作業區,將原本應在自動化箱區側邊進行的交互作業轉移到交互作業區中轉箱區側邊,用物理圍網實現了港外集卡與港內自動化水平運輸設備間交通的空間隔離,港外集卡進港后的運行和交互作業過程不與港區自動化水平運輸設備產生任何交叉,系統安全性能好。同時該模式還具備港外集卡邊裝卸交互作業模式的所有優點,如自動化箱區出箱(收箱)點多、港外集卡交互作業周轉效率高、單箱交互作業循環平均設備能耗低等。
2.2 欽州港自動化集裝箱碼頭
2.2.1工程概況及特點
欽州港自動化集裝箱碼頭,建設4個10萬噸級集裝箱泊位,碼頭預測集裝箱年吞吐量260萬TEU。主要工程特點包括:1)碼頭岸線布局形態常規,集裝箱泊位連續布置在同一直線岸線上。2)港內集裝箱集疏運以公路集疏運為主,水路中轉集疏運為輔。公路集疏運集裝箱運量占碼頭總吞吐量的比例為60%,同時還存在部分鐵路集疏運集裝箱。集裝箱在港內的主要轉運流向呈現出垂直于碼頭岸線的狀態。3)碼頭陸域縱深大,為807.5~1 007.0 m。
為適應集裝箱在港內主要轉運流為垂直于碼頭岸線的工程特點,碼頭確立了“自動化堆場垂直布置+自動化水平運輸采用智能導引車(IGV)”的全自動化總體技術路線,垂直布置箱區長度約536 m(可布置85個20 ft集裝箱箱位)。
2.2.2港外集卡交互作業工藝方案設計
欽州港自動化集裝箱碼頭具備陸域縱深大、垂直布置箱區長度大的工程特點,若港外集卡提送箱采用常規端裝卸交互作業模式,將會存在以下問題:
1)單箱交互作業循環平均設備能耗大,自動化箱區裝卸設備帶箱行走的距離更大,將對該模式中單箱交互作業循環下設備平均能耗本身就高的缺點進一步放大;2)箱區長度超過自動化裝卸機械設備的經濟運距,將對交互作業生產效率產生不利影響;3)出箱(收箱)點少,影響港外集卡提送箱作業的周轉效率。
綜合考慮上述因素,結合港外集卡與港內自動化水平運輸設備需要隔離分流的基本要求,提出“邊裝卸U形通道交互”的新型港外集卡提送箱工藝模式。該作業模式工藝平面布置及斷面見圖4。

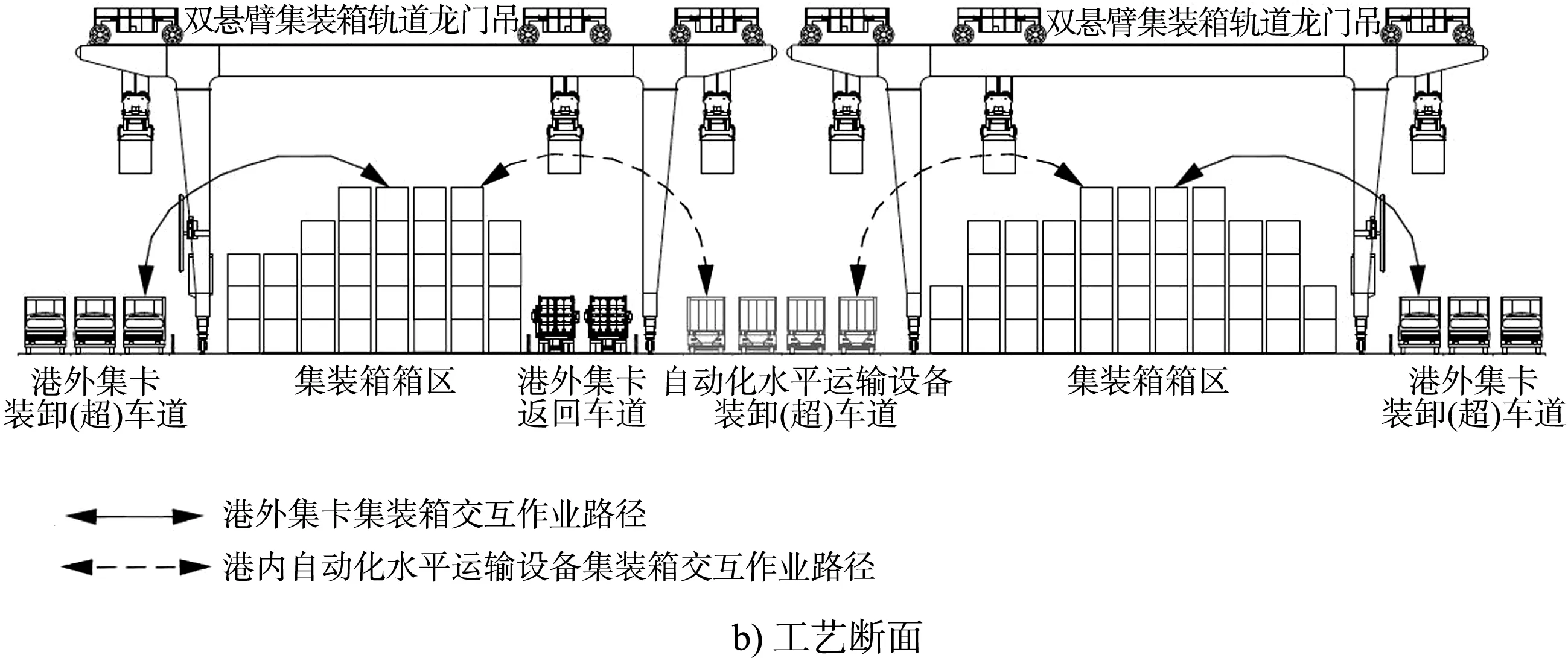
圖4 邊裝卸U形通道交互作業模式
垂直布置自動化集裝箱箱區內設置多條可供港外集卡通行的U形通道,通道與自動化集裝箱堆場后方的非自動化區域連通,與港區自動化區域之間采用圍網隔離。港外集卡在箱區間的運行范圍被限制在U形通道之內。
自動化箱區內部裝卸作業采用具備自動化和遠程操控自由切換功能的雙懸臂集裝箱軌道龍門吊。港外集卡通過目標箱所在自動化箱區的U形隔離通道進入到箱區內部,在箱區側邊目標箱所在貝位處等待與自動化雙懸臂軌道吊交互作業,自動化雙懸臂軌道吊根據系統指令完成集裝箱在自動化箱區內的翻倒、吊放和與港外集卡遠程操控交互作業(即裝卸車)。港外集卡完成提送箱交互作業后,沿U形通道駛離自動化箱區,返回非自動化區域。
該模式針對碼頭陸域縱深大、垂直自動化集裝箱箱區長的特點,將港外集卡邊裝卸交互作業模式應用到了堆場采用垂直布置形式的全自動集裝箱裝卸工藝系統中。港外集卡進入自動化箱區,在箱區側邊完成與堆場自動化裝卸設備的提送箱交互作業,具備傳統邊裝卸交互作業模式的所有優點,如自動化箱區出箱(收箱)點多、港外集卡交互作業周轉效率高、單箱交互作業循環平均設備能耗低等。U形隔離通道對港外集卡的運行區域和路徑進行了限制,能滿足港外車輛與自動化水平運輸設備交通隔離分流的基本要求。該模式對于陸域縱深大、公路集疏運集裝箱運量大等工程特點的自動化集裝箱碼頭有良好的適用性。
3 結語
1)在港內外車輛無法實現安全混行前,港外集卡提送箱交互作業模式選擇和方案設計是集裝箱自動化裝卸工藝系統設計無法回避的重難點問題之一。港外集卡提送箱交互作業應充分結合自動化集裝箱碼頭工程及總體技術路線特點,因地制宜地提出合理的解決方案。
2)港外集卡“邊裝卸集中交互”作業模式在公路集疏運集裝箱運量規模小、堆場采用平行布置的全自動化集裝箱裝卸工藝系統中具備良好的適應性;港外集卡“邊裝卸U形通道交互”作業模式在公路集疏運集裝箱運量規模大、陸域縱深大、堆場采用平行布置的全自動化集裝箱裝卸工藝系統中具備良好的適用性。
3)以上兩種港外集卡提送箱新型交互作業模式,均具備實現港內外車輛運行軌跡空間隔離、提升自動化系統運行效率、降低生產作業設備能耗等優點。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08