陣列誤差下的近場源PCA-BP參數(shù)估計(jì)算法
2022-04-26 06:21:00趙佩瑤王蘭美王桂寶
西安電子科技大學(xué)學(xué)報(bào) 2022年1期
關(guān)鍵詞:信號
王 樂,趙佩瑤,王蘭美,王桂寶
(1.西安電子科技大學(xué) 物理與光電工程學(xué)院,陜西 西安710071;2.西安電子科技大學(xué) 通信工程學(xué)院,陜西 西安710071;3.陜西理工大學(xué) 物理與電信工程學(xué)院,陜西 漢中 723001)
在無源定位、資源探測、聲吶測向以及移動通信等眾多領(lǐng)域,對于信號波達(dá)方向估計(jì)的探索一直都是熱點(diǎn)[1]。到達(dá)角 (Direction of Arrival,DoA)估計(jì)技術(shù)最核心的應(yīng)用就是智能天線技術(shù),這一技術(shù)促進(jìn)了現(xiàn)代通信的發(fā)展。雖然一些經(jīng)典的高分辨率算法例如多重信號分類 (MUitiple SIgnal Classification,MUSIC)算法[2]、旋轉(zhuǎn)不變技術(shù)估計(jì)信號參數(shù) (Estimating Signal Parameter via Rotational Invariance Techniques,ESPRIT)算法[3]等可以準(zhǔn)確無誤地對信號來波方向進(jìn)行估計(jì),然而當(dāng)有陣列誤差存在時(shí),該類算法的估計(jì)性能將會降低,因此必須對誤差進(jìn)行有效的校正。誤差校正往往是根據(jù)不同的誤差建立不同的誤差模型,通過這些模型找到相應(yīng)的方法來校正誤差并進(jìn)行到達(dá)角估計(jì)的。誤差的建模是一個(gè)非常復(fù)雜的問題,如果同時(shí)存在多種誤差,誤差的建模將非常困難,相應(yīng)的誤差校正過程也非常繁瑣,甚至有估計(jì)不準(zhǔn)確等諸多問題。隨著統(tǒng)計(jì)智能算法的飛速發(fā)展,有越來越多的統(tǒng)計(jì)智能算法被用于信號處理的到達(dá)角估計(jì)中,比如神經(jīng)網(wǎng)絡(luò)、支持向量回歸算法等[4-10]。鑒于神經(jīng)網(wǎng)絡(luò)有良好的適應(yīng)性能和非線性映射的特點(diǎn),在建立預(yù)測信號模型的過程中,可以將空間中實(shí)際存在的噪聲、陣列誤差、傳輸通道等多種因素包含在訓(xùn)練過程中,因此不需要誤差建模和誤差校正,可以在進(jìn)行參數(shù)估計(jì)時(shí)直接利用已經(jīng)訓(xùn)練好的網(wǎng)絡(luò)。目前方法在進(jìn)行網(wǎng)絡(luò)訓(xùn)練時(shí),選取的信號特征為協(xié)方差矩陣的上三角元素,上三角元算得數(shù)目與陣元數(shù)目的平方成正比,因此對于大型陣列來說特征數(shù)目非常可觀,這將導(dǎo)致網(wǎng)絡(luò)模型非常復(fù)雜,網(wǎng)絡(luò)訓(xùn)練時(shí)間加長。針對上述問題,筆者在進(jìn)行近場源參數(shù)估計(jì)[11-12]時(shí)引入了主成分分析(Principal Component Analysis,PCA)方法[13-15]。該方法將降維后的特征用于神經(jīng)網(wǎng)絡(luò)的模型訓(xùn)練[16-18],縮短了訓(xùn)練時(shí)間,降低了運(yùn)算量,在存在陣列誤差的情況下能對近場信號參數(shù)進(jìn)行有效估計(jì)。
1 近場源陣列信號接收模型
當(dāng)信號源位于天線陣列的近場區(qū)時(shí),信號源的波前是球面波,因此不能采用和遠(yuǎn)場相同的方式來進(jìn)行分析。筆者在接收近場信源時(shí)使用標(biāo)量聲壓天線陣列,該模型中有M個(gè)全向陣元均勻排列,陣元間距為d,該陣列的結(jié)構(gòu)圖見圖1,假設(shè)其中沒有陣列誤差。
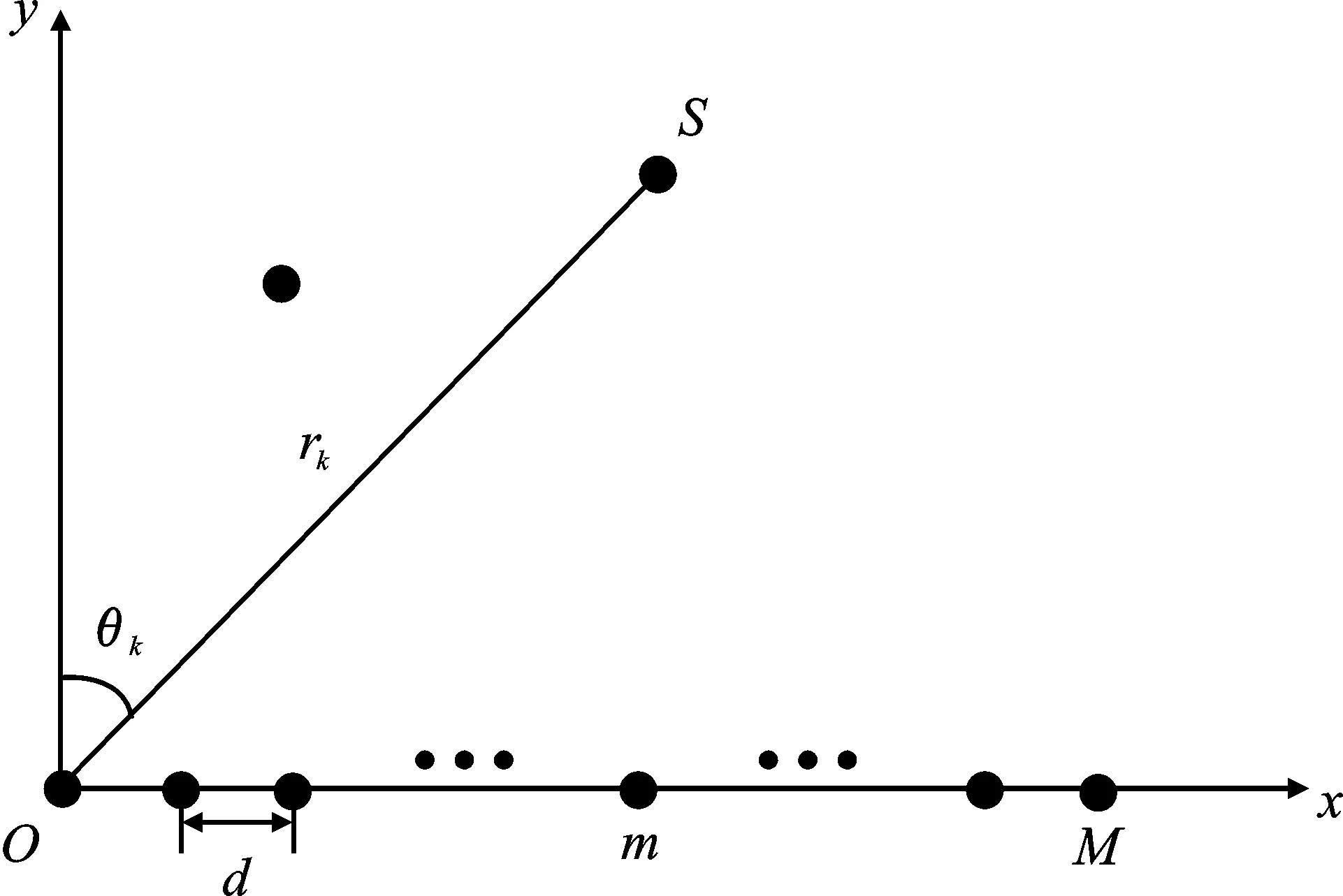
圖1 近場聲源信號接收陣列結(jié)構(gòu)圖
假設(shè)有K個(gè)獨(dú)立的近場非高斯信源入射到圖1的陣列模型上,入射信號都是窄帶信號,以坐標(biāo)原點(diǎn)為參考陣元,rk表示第k個(gè)信源與參考陣元間的距離,θk表示第k個(gè)信源的入射角,快拍數(shù)值取P。在t時(shí)刻,第m個(gè)陣元中輸出信號為
(1)
其中,1≤k≤K,1≤m≤M,sk(t)表示第k個(gè)入射信源,nm(t)表示第m個(gè)陣元接收的噪聲矩陣。τmk表示第k個(gè)信源分別到達(dá)第m個(gè)陣元和參考陣元的時(shí)延差:
(2)
τmk≈mμk+m2ηk,
(3)

可得到第m個(gè)陣元上的接收信號:
(4)
第m個(gè)和-m個(gè)陣元的方差為
(5)
現(xiàn)有的子空間類方法大部分都是用這種方法對消掉距離因子,從而將距離和角度解耦合。然后進(jìn)行兩步參數(shù)估計(jì)。當(dāng)存在陣列誤差時(shí),無法將第m個(gè)陣元和與其相對原點(diǎn)對稱的第-m個(gè)陣元的距離因子相抵消,即式(5)不再成立,同時(shí)陣列導(dǎo)向矢量也因?yàn)檎`差的原因發(fā)生了變化,使得子空間類算法(如兩步MUSIC算法)無效。
存在陣列誤差時(shí)的陣列接收數(shù)據(jù):
Xe(t)=AeS(t)+N(t) ,
(6)
其中,Ae=f(θ,r,er)是包含陣列誤差的導(dǎo)向矢量矩陣,這個(gè)誤差可以是位置誤差、幅相誤差、耦合誤差,也可以是多種誤差的組合,甚至很難給出誤差的表達(dá)式,但這都不影響用筆者提出的方法進(jìn)行正確的信號參數(shù)估計(jì)。因?yàn)楣P者提出的方法將訓(xùn)練數(shù)據(jù)中包含的陣列誤差和噪聲、傳輸通道等多種因素包含在訓(xùn)練模型中,無須進(jìn)行陣列誤差建模校正,也不用進(jìn)行譜峰搜索,對待估計(jì)信號參數(shù)進(jìn)行預(yù)測時(shí)可以采用已經(jīng)訓(xùn)練好的網(wǎng)絡(luò),可以實(shí)現(xiàn)低信噪比和存在陣列誤差情況下的信號參數(shù)估計(jì)。
2 陣列PCA-BP算法
后向傳播(Back Propagation,BP)神經(jīng)網(wǎng)絡(luò)[16-18]是多層前饋神經(jīng)網(wǎng)絡(luò)。該類網(wǎng)絡(luò)根據(jù)誤差逆向傳播算法進(jìn)行訓(xùn)練,廣泛應(yīng)用于函數(shù)逼近、模式識別、分類、數(shù)據(jù)壓縮等方面。可以用圖2簡單表示其拓?fù)浣Y(jié)構(gòu)。
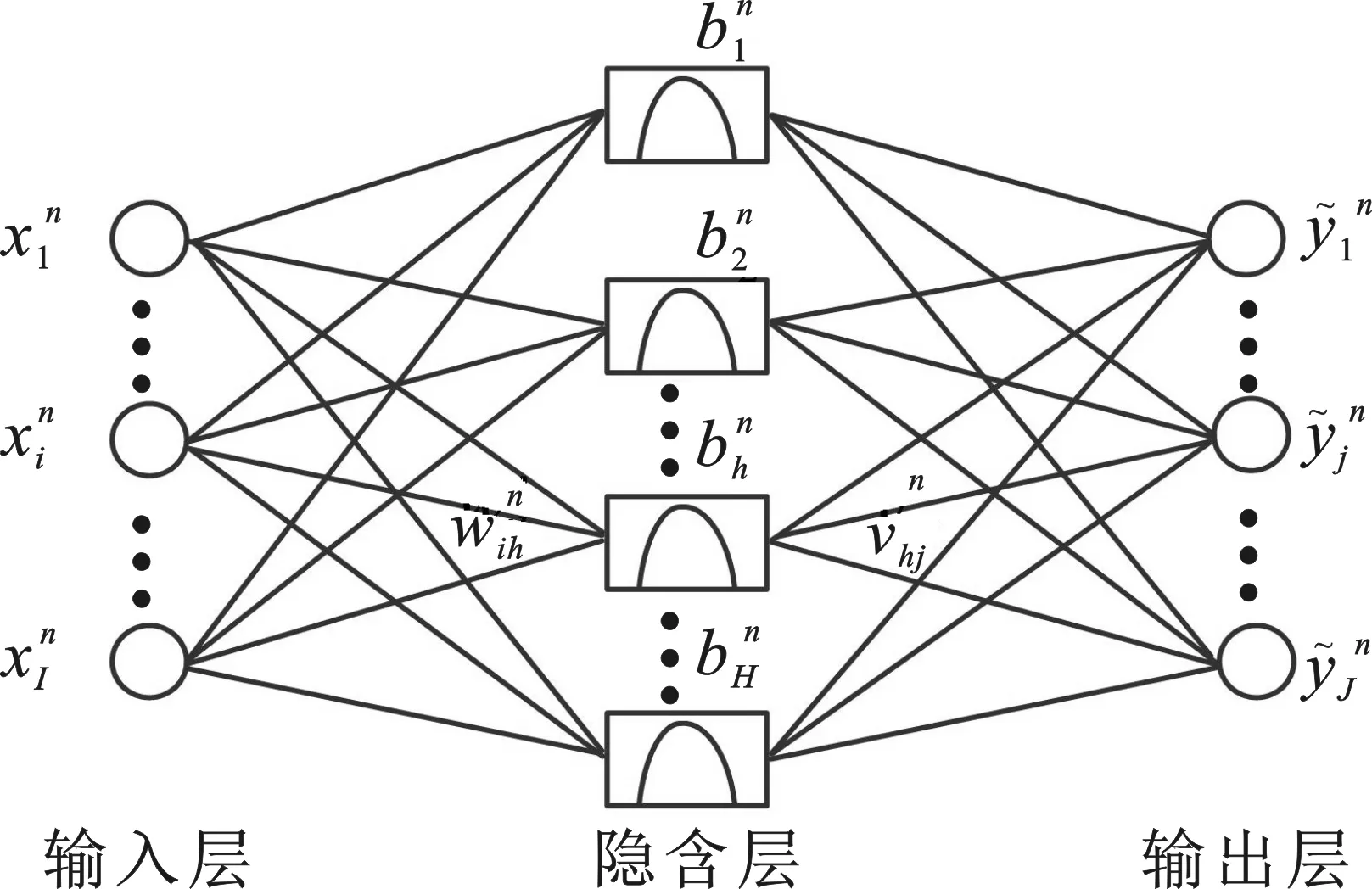
圖2 BP神經(jīng)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)示意圖


(7)
第j個(gè)輸出層神經(jīng)元的輸出為
(8)
(9)
通過比較式(9)中得到的均方誤差與設(shè)定達(dá)到的誤差來決定是否更新權(quán)值和閾值。如果小于設(shè)定的誤差,則完成迭代;如果仍大于設(shè)定的誤差值,繼續(xù)對權(quán)值和閾值進(jìn)行更新,直到此值小于設(shè)定的誤差要求值。
假設(shè)所選取的訓(xùn)練樣本的數(shù)目為N個(gè),陣元數(shù)為M,信源數(shù)為K,信號快拍數(shù)為P,使用的陣列PCA-BP算法對近場源參數(shù)估計(jì)的步驟如下:
① 根據(jù)式(6)分別計(jì)算出N個(gè)訓(xùn)練樣本信號的協(xié)方差矩陣:
(10)

(11)

⑧ 對網(wǎng)絡(luò)中的權(quán)值以及閾值進(jìn)行更新。
⑨ 通過上面步驟,可以得到訓(xùn)練誤差Ek,將該值與網(wǎng)絡(luò)中設(shè)定的誤差ek的大小作比較。若訓(xùn)練誤差比設(shè)定誤差小,則停止迭代,訓(xùn)練完成;否則返回步驟⑤ 。
⑩ 訓(xùn)練完成后從數(shù)據(jù)集中任選一組樣本進(jìn)行預(yù)測。
3 仿真實(shí)驗(yàn)
仿真實(shí)驗(yàn)兩個(gè)近場、窄帶、非高斯平穩(wěn)聲源信號入射到圖1所示的均勻線性天線陣列上,該接收陣列有8個(gè)陣元,陣元間隔d=λ/4,信號頻率設(shè)為[fs/8,fs/10],fs是信號的采樣頻率,λ是頻率為fs/8信號對應(yīng)的波長,快拍數(shù)為200,噪聲為高斯白噪聲。訓(xùn)練樣本數(shù)據(jù)的角度間隔Δθ=6°,距離間隔Δr=0.05λ,訓(xùn)練角度的區(qū)間設(shè)在[-90°,90°],訓(xùn)練距離的區(qū)間設(shè)在[4λ,5λ],筆者取主成分累積貢獻(xiàn)率為95%。取173組樣本數(shù)據(jù),通過交叉取樣將其分為兩部分,分別用于訓(xùn)練和測試。取兩個(gè)沒有經(jīng)過訓(xùn)練的信號進(jìn)行預(yù)測,這兩個(gè)信號的角度和距離參數(shù)為[10°,4.5λ,16°,4.55λ],信噪比為10 dB,仿真結(jié)果如圖3~圖5所示。
圖3表示各主成分的貢獻(xiàn)率,可以看出前幾個(gè)主成分的貢獻(xiàn)率較高,從前往后依次衰減直到為0。文中主成分累積貢獻(xiàn)率取值不小于95%;為滿足這一條件需將前4個(gè)主成分作為后向傳播神經(jīng)網(wǎng)絡(luò)的訓(xùn)練輸入信號特征來訓(xùn)練網(wǎng)絡(luò)。圖4為文中算法訓(xùn)練所用的時(shí)間與BP算法、GRNN算法的比較圖。筆者通過比較算法的訓(xùn)練時(shí)間研究了算法復(fù)雜度,為了避免偶然性,進(jìn)行了10次仿真實(shí)驗(yàn),取這10次訓(xùn)練時(shí)間的平均值,在數(shù)據(jù)量等同的情況下與其他算法進(jìn)行了比較。由圖4可知,文中算法、BP算法和GRNN算法的訓(xùn)練時(shí)間分別為3.340 5 s、 15.899 6 s和7.520 6 s。從這些數(shù)據(jù)上可知文中算法用的訓(xùn)練時(shí)間最少,即文中算法的時(shí)間復(fù)雜度是最低的,運(yùn)算量也是最低的。文中算法進(jìn)行預(yù)測耗費(fèi)0.093 9 s,而兩步MUSIC算法耗費(fèi)1.348 5 s進(jìn)行譜峰搜索,由此可得文中算法的預(yù)測時(shí)間遠(yuǎn)小于兩步MUSIC算法所需的預(yù)測時(shí)間。
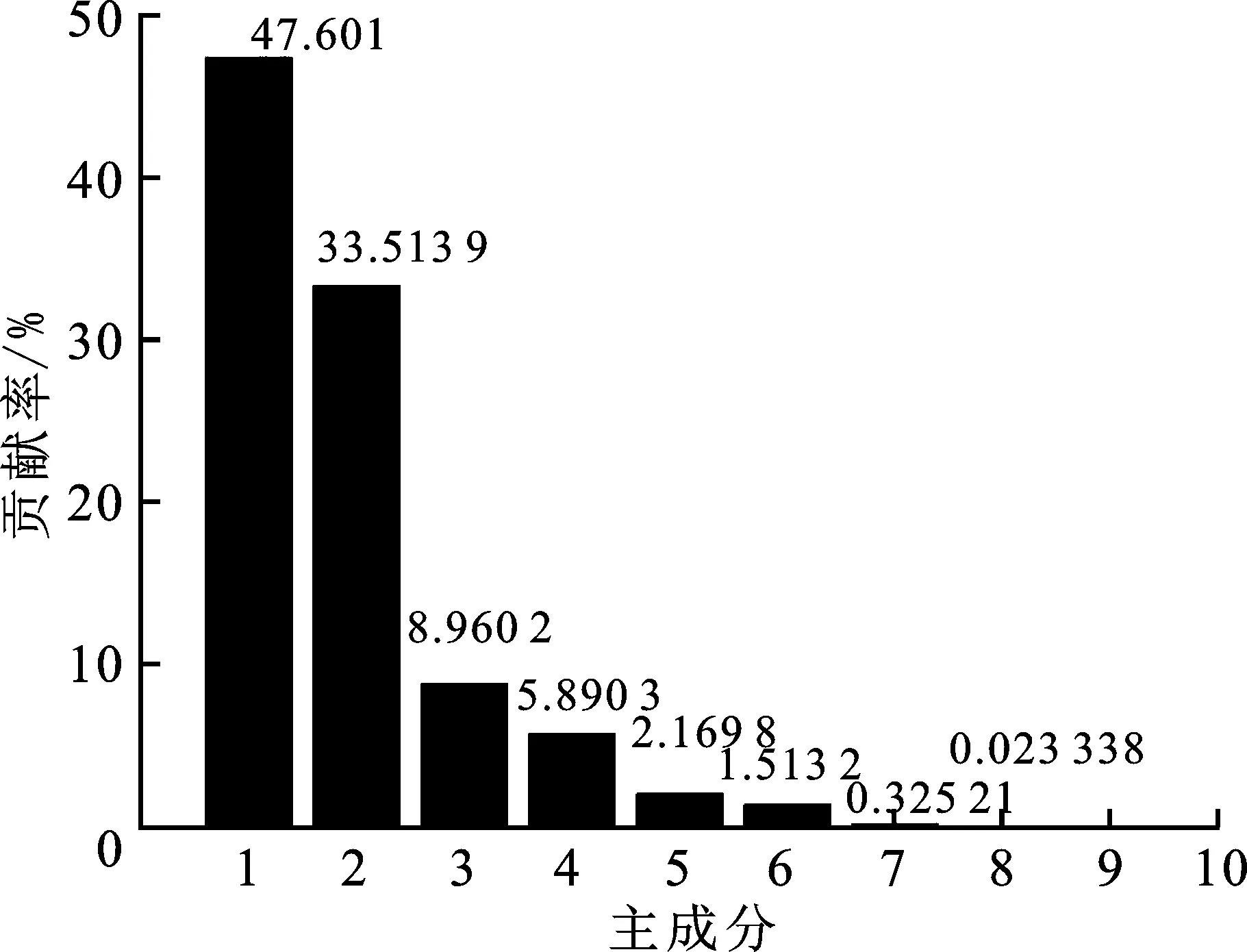
圖3 陣列PCA-BP算法各主成分貢獻(xiàn)率
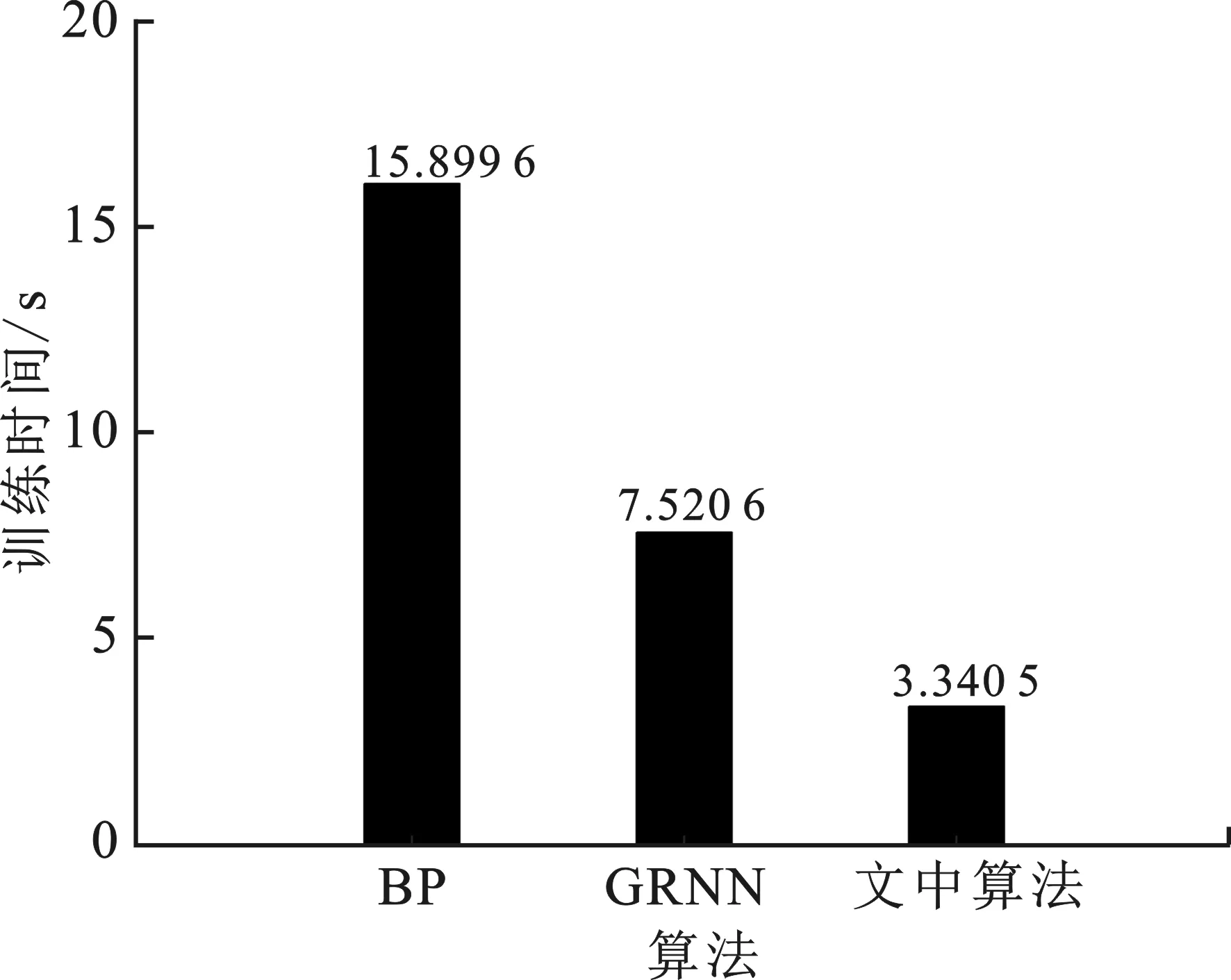
圖4 3種算法訓(xùn)練時(shí)間圖
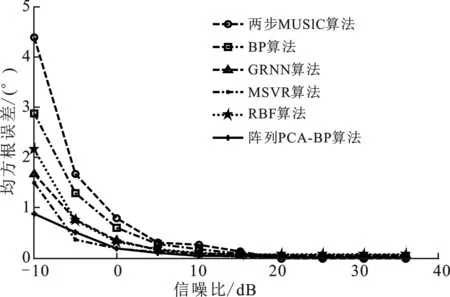
圖5 均方根誤差比較圖
圖5為文中陣列PCA-BP算法與兩步MUSIC算法、BP算法、GRNN算法、MSVR算法的角度均方根誤差比較圖。由圖可知當(dāng)信噪比取值范圍為-10 dB~20 dB時(shí),文中算法的估計(jì)均方根誤差值最小,性能優(yōu)于其余4種算法,當(dāng)取值高于20 dB時(shí),進(jìn)行仿真的5種算法的估計(jì)精度都比較好。
將仿真實(shí)驗(yàn)1中的陣列添加誤差,其中添加的陣列誤差包括幅相誤差ee=diag[1.025,0.925,0.921,1.079,1.015,0.992,1.087,0.910,0.997,0.980,1.080]和陣列誤差de=[0.27,0.28,0.29,0.30,0.24,0.23,0.21]λ,其他仿真條件不變。仿真結(jié)果如圖6~圖9所示。實(shí)驗(yàn)條件為P2.6 GHz GPU;4 GB內(nèi)存;MATLAB2016b開發(fā)平臺。
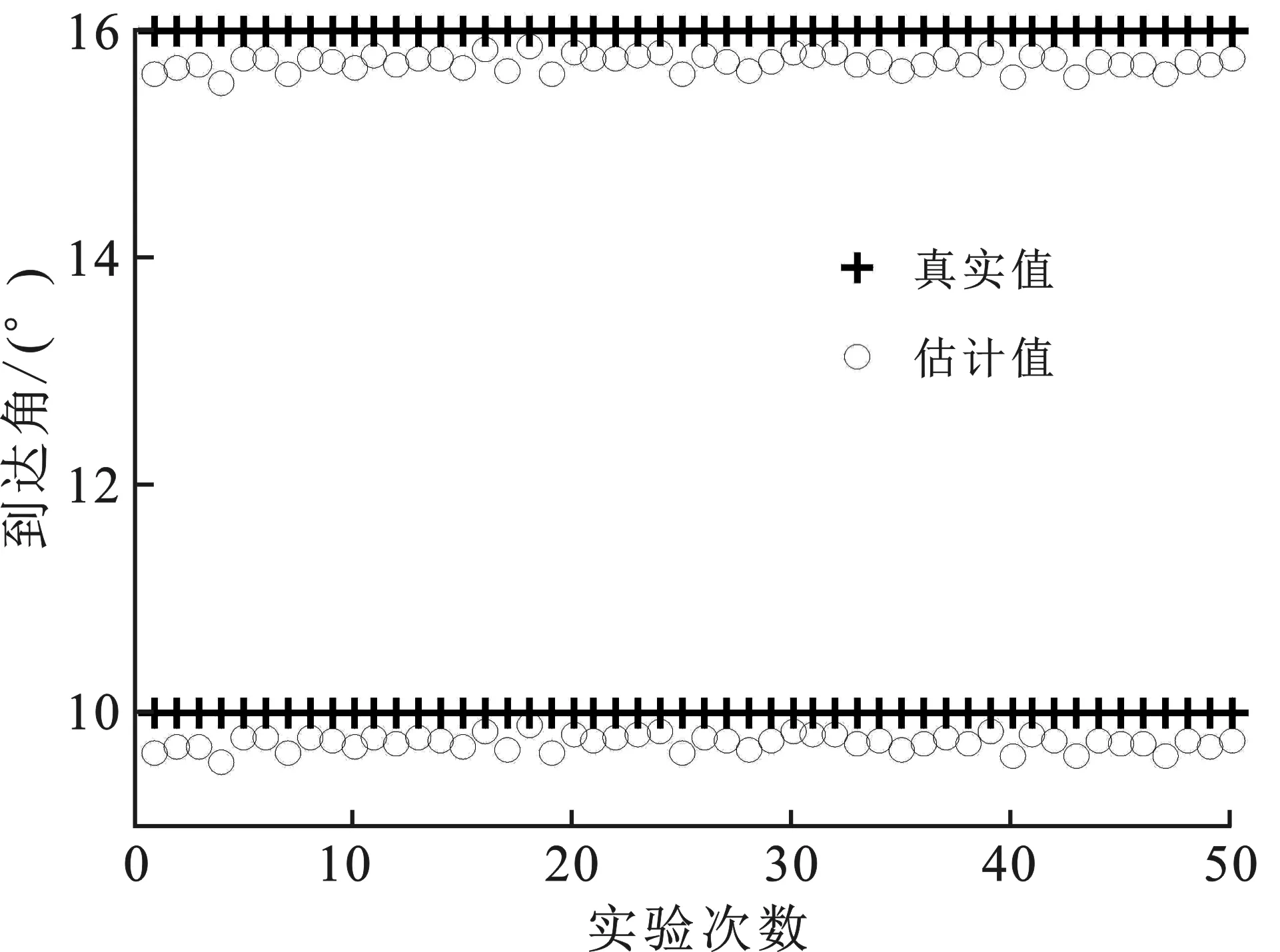
圖6 存在陣列誤差的陣列PCA-BP算法的角度散點(diǎn)圖
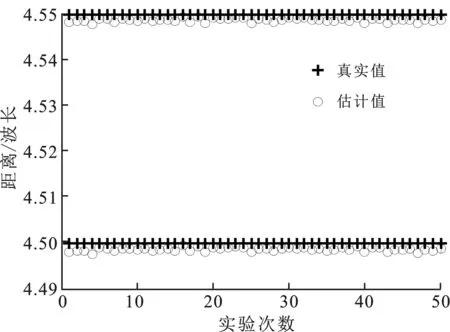
圖7 存在陣列誤差的陣列PCA-BP算法的距離散點(diǎn)圖
圖6為在存在陣列誤差的情況下使用文中陣列PCA-BP算法在10 dB信噪比下對兩個(gè)未經(jīng)訓(xùn)練的近場觀測信號估計(jì)出的角度散點(diǎn)圖。可以看出,估計(jì)得到的角度值和真實(shí)角度值相對應(yīng),兩個(gè)信號的角度估計(jì)誤差都在0.5°以內(nèi),真實(shí)值和估計(jì)值十分接近。圖7為兩個(gè)觀測信號對應(yīng)距離參數(shù)估計(jì)值的散點(diǎn)圖。可以看出,估計(jì)得到的距離值和真實(shí)的距離值相吻合,誤差都在0.005以內(nèi)。因此,文中算法可以對近場源的角度和距離等參數(shù)進(jìn)行有效的估計(jì)。
圖8為當(dāng)信噪比為10 dB時(shí),兩步MUSIC算法得到的觀測信號估計(jì)角度散點(diǎn)圖。從圖中可以看出,估計(jì)出的角度參數(shù)和真實(shí)值完全不對應(yīng),第1個(gè)入射角的真實(shí)值和估計(jì)值誤差接近10°,第2個(gè)入射角的真實(shí)值和估計(jì)值誤差接近4°。圖9為兩步MUSIC算法估計(jì)得到的觀測信號的距離參考陣元的距離的散點(diǎn)圖。從圖中可以看出,估計(jì)出的距離參數(shù)和真實(shí)值也是完全不對應(yīng)的,真實(shí)距離和估計(jì)距離的誤差都大于1。因此可以看出,在陣列誤差存在的情況下,兩步MUSIC算法對于近場源參數(shù)的估計(jì)是完全失效的,但文中算法的近場源參數(shù)估計(jì)結(jié)果依然比較準(zhǔn)確。
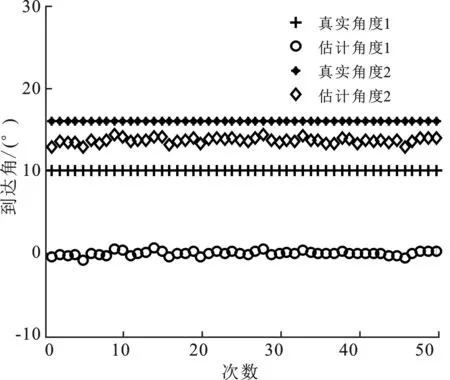
圖8 存在陣列誤差的陣列兩步MUSIC算法的角度散點(diǎn)圖

圖9 存在陣列誤差的兩步MUSIC算法的距離散點(diǎn)圖
4 結(jié)束語
筆者所提出PCA-BP近場源參數(shù)估計(jì)算法,能夠在存在陣列誤差的情況下完成信號參數(shù)的高精度估計(jì)。通過使用PCA算法降低輸入神經(jīng)網(wǎng)絡(luò)的信號特征維數(shù),可以減少BP網(wǎng)絡(luò)中輸入層神經(jīng)元個(gè)數(shù)進(jìn)而縮短訓(xùn)練時(shí)間,并且具有很好的抗噪能力。由仿真結(jié)果可知,文中算法優(yōu)于傳統(tǒng)的兩步MUSIC算法、BP算法、GRNN算法以及MSVR算法。同時(shí)也表明了文中算法也能夠在存在陣列誤差的情況下,對于近場源的角度和距離參數(shù)進(jìn)行準(zhǔn)確的估計(jì),避免誤差建模和估計(jì)的繁瑣過程,具有重要的理論意義和實(shí)用價(jià)值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06