無人機(jī)發(fā)展應(yīng)用及反無手段研究
2022-04-27 07:26:40任媛媛高一棟焦慕卿
火控雷達(dá)技術(shù) 2022年1期
關(guān)鍵詞:系統(tǒng)
任媛媛 高一棟 焦慕卿
(1.西安電子工程研究所 西安 710100;2.中國(guó)北方工業(yè)公司 北京 100053)
0 引言
隨著人工智能、現(xiàn)代控制等技術(shù)的發(fā)展,無人機(jī)應(yīng)用范圍越來越廣。在民用、軍用,國(guó)內(nèi)、國(guó)際,甚至重大政治活動(dòng)中都有無人機(jī)的身影。
民用上,無人機(jī)在農(nóng)業(yè)、勘探測(cè)繪、警用、文化(航拍、攝影)、甚至疫情防控等領(lǐng)域發(fā)揮著重要作用。但不受控的情況下也給飛機(jī)和鐵路交通、環(huán)境和人身的安全和保密帶來威脅,如機(jī)場(chǎng)、高鐵站周邊無人機(jī)干擾有人駕駛飛機(jī)飛行、高鐵通行,無人機(jī)運(yùn)毒,無人機(jī)未報(bào)批進(jìn)行測(cè)繪等時(shí)有發(fā)生。一些重大政治活動(dòng)中也有無人機(jī)的出現(xiàn),如不明無人機(jī)出現(xiàn)在白宮草坪,韓國(guó)總統(tǒng)府附近拍照,出現(xiàn)在默克爾競(jìng)選集會(huì)上,甚至被遙控制造恐怖襲擊,2018年委內(nèi)瑞拉總統(tǒng)馬杜羅檢閱軍隊(duì)時(shí)遭2架載著C4炸藥的無人機(jī)襲擊,2021年11月伊拉克總理卡迪米的住所多次遭武裝無人機(jī)的襲擊等,類似事件,給國(guó)家形象帶來負(fù)面影響。
軍事上,無人機(jī)及蜂群設(shè)備以其低成本、靈活機(jī)動(dòng)的工作方式,和無人化、智能化的先進(jìn)工作手段受到各方青睞,日益成為戰(zhàn)場(chǎng)新威脅。無人機(jī)通常用于執(zhí)行探測(cè)、偵查、電子戰(zhàn)或其他非動(dòng)能作戰(zhàn)任務(wù)、自殺式襲擊、甚至定點(diǎn)清除等,如印巴邊界印度使用“蒼鷺”無人機(jī)偵察;2019年沙特石油公司兩處設(shè)施遭無人機(jī)攻擊;美管敘利亞油氣田遭無人機(jī)投簡(jiǎn)易迫擊炮彈襲擊;2020年初美國(guó)利用MQ-9C無人機(jī)對(duì)伊朗高級(jí)官員實(shí)施定點(diǎn)清除;2020年發(fā)生在南高加索地區(qū)納卡沖突中阿塞拜疆使用數(shù)量遠(yuǎn)超亞美尼亞的多種無人機(jī)甚至成為改變戰(zhàn)爭(zhēng)的關(guān)鍵要素……層出不窮的無人機(jī)事件,使戰(zhàn)場(chǎng)作戰(zhàn)樣式發(fā)生了改變,世界各國(guó)在無人化作戰(zhàn)方式上越來越重視。
1 無人機(jī)作戰(zhàn)方式及發(fā)展
1.1 無人機(jī)應(yīng)用特點(diǎn)及分類
無人機(jī)被越來越多的應(yīng)用于作戰(zhàn),因其具備以下特點(diǎn):
1)平臺(tái)微型化:小型甚至微型無人機(jī)體積不及書本大小,可衣兜或掌上攜帶、單兵作戰(zhàn)背負(fù),甚至可以無人機(jī)攜帶無人機(jī),無需專用平臺(tái)或底盤。
2)放飛條件低:無需大型起飛降落場(chǎng)地或者特別的場(chǎng)地和路面條件,行駛的車輛、山區(qū)、甚至手掌上都可以起飛。
3)目標(biāo)特征小:無人機(jī)采用復(fù)合材料制作,體積小、重量輕、RCS小,對(duì)于雷達(dá)和光電探測(cè)手段來講,目標(biāo)特征小,易隱藏于背景光線或雜波。
4)突防能力強(qiáng),成功率高:運(yùn)動(dòng)方式機(jī)動(dòng)靈活,其運(yùn)動(dòng)特征與鳥類、樹木、汽車等雜波近似,易被隱藏不易發(fā)現(xiàn),可低空高速運(yùn)動(dòng),也可盤旋慢速前行,臨機(jī)出現(xiàn)。
5)集成度高:部分無人機(jī)集雷達(dá)、攝像頭、激光、電子干擾甚至炸藥等探測(cè)或者攻擊手段、特定或多種于一身,小體積實(shí)現(xiàn)復(fù)合功能。
根據(jù)美國(guó)防部和北約的劃分,無人機(jī)有以下分類見表1、表2所示。
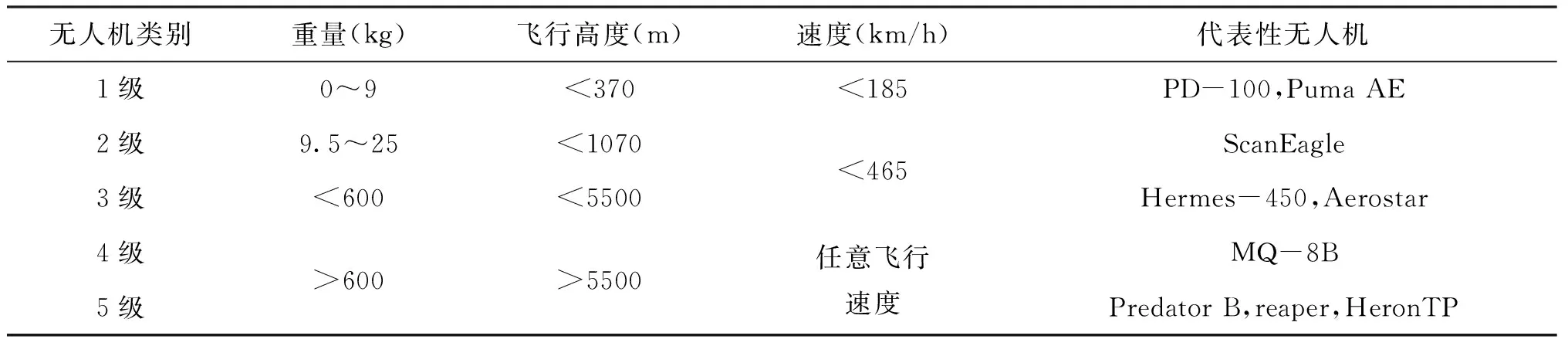
表1 美國(guó)國(guó)防部(DOD)無人機(jī)分類標(biāo)準(zhǔn)

表2 北約定義的無人機(jī)類型和級(jí)別
1.2 無人機(jī)作戰(zhàn)方式分析
無人機(jī)可用于偵察預(yù)警、電子干擾、集群攻擊、特種作戰(zhàn)、火力引導(dǎo)、自殺式襲擊等等,甚至部分無人機(jī)集多種功能于一身。表1中的1~2級(jí),通常為小微型無人機(jī),主要用于偵查、自殺式襲擊等功能,如PD-100,Puma AE、ScanEagle等;表1中的3~5級(jí),由于體積稍大,可復(fù)合加裝光電、雷達(dá)、無線電偵測(cè)及干擾等設(shè)備,以及炸藥、導(dǎo)彈等打擊武器,能夠完成更深層功能,如MQ-8B、MQ-9B(察打一體)等。
無人機(jī)應(yīng)用于戰(zhàn)場(chǎng)作戰(zhàn),既可單獨(dú)起飛作戰(zhàn),也可蜂群方式作戰(zhàn)。無人機(jī)蜂群可在空中實(shí)施分布式協(xié)同作戰(zhàn),或集中飽和攻擊,或分散實(shí)現(xiàn)大的散布面積。
戰(zhàn)術(shù)上,部分體積較大無人機(jī)通常攜帶載荷自主起飛作戰(zhàn)居多,如MQ-1“捕食者”系列、MQ-4“全球鷹”系列、MQ-9“死神”系列、甚至續(xù)航時(shí)間可達(dá)10h的Dash-X等等。這一類無人機(jī)通常速度較高,載荷能力較強(qiáng),體型較大,但因外形設(shè)計(jì)、機(jī)身材料及涂覆考慮隱身性能,因而RCS也較小,使得雷達(dá)難以探測(cè)。小型無人機(jī)如“精靈”類、旋翼類、小型固定翼類,甚至微型無人機(jī)如RQ-11“大烏鴉”、“珀耳狄克斯(Perdix)”、“螢火蟲(FireFly,以色列制)”,通常體型較小,載荷能力有限,飛行速度、高度低,飛行距離受限,其作戰(zhàn)方式大多為運(yùn)輸機(jī)或者戰(zhàn)機(jī)運(yùn)輸至指定地點(diǎn)上空或附近釋放,蜂群作戰(zhàn)。如美國(guó)使用F-16戰(zhàn)機(jī)運(yùn)送“山鶉”無人機(jī)至指定空域投放、“小精靈”計(jì)劃無人機(jī)通常以蜂群形式作戰(zhàn),不僅可投放,還可完成任務(wù)后回收。
近年來,隨著無人機(jī)及電子戰(zhàn)的發(fā)展,部分體積較大型無人機(jī)也在朝著蜂群作戰(zhàn)方式發(fā)展,如納卡沖突中阿方采用的情報(bào)監(jiān)視偵查(ISR)無人機(jī)和至少2種以上對(duì)地攻擊無人機(jī)(“貝拉克塔”(翼展12m)和“哈洛普”)進(jìn)行蜂群戰(zhàn)術(shù),實(shí)現(xiàn)協(xié)同作戰(zhàn)和飽和攻擊。而隨著人工智能技術(shù)的發(fā)展,越來越多的項(xiàng)目將無人機(jī)自主飛行技術(shù)與人工智能決策相結(jié)合,實(shí)行無人機(jī)+集群化+人工智能作戰(zhàn)方式。2020年8月,印度陸軍開始開展巡飛彈蜂群的人工智能攻擊研究,從5枚增至75枚并在閱兵節(jié)上演示。2021年6月,美國(guó)空軍在“橙旗”演習(xí)中使用MQ-20“復(fù)仇者”無人機(jī)再次對(duì)SkyBorg項(xiàng)目的自主控制系統(tǒng)(ACS)軟件包進(jìn)行了飛行測(cè)試。以色列軍方更在2021年5月對(duì)加沙的哈馬斯組織發(fā)動(dòng)空襲和導(dǎo)彈打擊期間,已經(jīng)使用了人工智能輔助的無人機(jī)蜂群作戰(zhàn)。

圖1 MQ-20無人機(jī)搭載SkyBorg吊艙
無人機(jī)技術(shù)及系統(tǒng)在全世界范圍如火如荼的發(fā)展和擴(kuò)散,特別是偵/攻一體無人機(jī)的研制成功,“蜂群”攻擊模式的發(fā)展,改變著瞬息萬變的戰(zhàn)場(chǎng)形態(tài),各國(guó)越來越重視無人機(jī)/反無人機(jī)系統(tǒng)作戰(zhàn)發(fā)展。美國(guó)近年來一直非常重視無人機(jī)/反無人機(jī)的發(fā)展,2017年美陸軍發(fā)布了《美國(guó)陸軍技術(shù)出版物(STP)3-01.81反無人機(jī)系統(tǒng)技術(shù)手冊(cè)》, 2019年發(fā)布《反無人機(jī)系統(tǒng)》, 2020年發(fā)布《小型無人機(jī)系統(tǒng)(SUAS)戰(zhàn)略》, 2021年1月發(fā)布《反小型無人機(jī)系統(tǒng)》戰(zhàn)略。目前國(guó)際上已有美國(guó)、以色列、英國(guó)、巴基斯坦、伊朗、伊拉克、尼日利亞、土耳其,還有非政府組織真主黨以及伊斯蘭國(guó)等國(guó)家將其應(yīng)用于實(shí)戰(zhàn)。
這種軍事環(huán)境背景下,如何有效探測(cè)無人機(jī)尤其是“小型戰(zhàn)術(shù)無人飛行器”及蜂群實(shí)現(xiàn)反無人機(jī)能力逐漸成為各種中近程防空探測(cè)手段研究的重點(diǎn)。
2 反無手段及系統(tǒng)組成
針對(duì)無人機(jī)運(yùn)動(dòng)特性及使用、作戰(zhàn)方式,各種反無裝備不斷涌現(xiàn),從作戰(zhàn)流程和使用功能上來講,主要分為探測(cè)單元、決策和控制單元、對(duì)抗處置單元三部分。
2.1 探測(cè)單元及主要手段
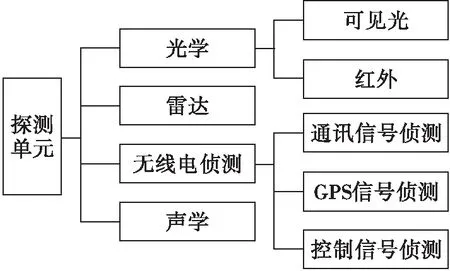
圖2 探測(cè)單元及其主要手段
探測(cè)上,雷達(dá)作為主要手段,用于全天候探測(cè),具備探測(cè)距離遠(yuǎn)、精度高、多目標(biāo)批數(shù)、不受天氣影響等優(yōu)點(diǎn)。雷達(dá)對(duì)于目標(biāo)的檢測(cè)依賴于發(fā)射電磁波到目標(biāo)的反射回波,是主動(dòng)工作方式,其缺點(diǎn)是信號(hào)暴露于空間,可被敵方電子偵測(cè)設(shè)備接收并被干擾設(shè)備干擾,或遭受目標(biāo)攻擊。此時(shí),雙多基地及無源雷達(dá)可有力對(duì)抗該攻擊方式。雷達(dá)對(duì)于低慢小目標(biāo)的探測(cè)性能主要受雜波影響,實(shí)現(xiàn)上有以下關(guān)鍵技術(shù):一是強(qiáng)雜波抑制技術(shù);二是精細(xì)化信號(hào)處理技術(shù);三是低空探測(cè)技術(shù)。解決途徑是實(shí)現(xiàn)時(shí)、空、頻的高分辨。同時(shí)對(duì)于不能實(shí)現(xiàn)高分辨的雷達(dá),許道明等人在檢測(cè)算法上進(jìn)行了研究。
光電紅外作為輔助被動(dòng)探測(cè)手段,不易被電子偵測(cè)設(shè)備探測(cè)并干擾到,探測(cè)精度較高,由于其對(duì)目標(biāo)成像功能,也常用于目標(biāo)識(shí)別和輔助決策,但易受天氣和光照影響。其對(duì)目標(biāo)的探測(cè)通過目標(biāo)成像以及紅外特性來實(shí)現(xiàn),當(dāng)大氣衰減、湍流產(chǎn)生變化,或者環(huán)境光照產(chǎn)生變化,厚云層或多云時(shí)目標(biāo)與背景紅外特性不明顯,逆光時(shí)目標(biāo)與背景對(duì)比度低,且在小目標(biāo)如體積接近鳥類時(shí)易因衍射效應(yīng)顯示為模糊斑點(diǎn),此時(shí)“低慢小”目標(biāo)的光電信號(hào)弱、信噪比低,難以檢測(cè)。其主要在目標(biāo)識(shí)別上應(yīng)用較為廣泛。
無線電偵測(cè)主要用于探測(cè)無人機(jī)工作所使用的頻譜,如通訊鏈路、控制鏈路、GPS/GLONASS導(dǎo)航信號(hào)等,是一種被動(dòng)探測(cè)手段。同時(shí)也可通過對(duì)目標(biāo)機(jī)型偵測(cè),進(jìn)行來襲目標(biāo)機(jī)型識(shí)別。相比其他方式,具有隱秘性好,不易受干擾、探測(cè)距離遠(yuǎn)等優(yōu)點(diǎn),但其精度相比光電和雷達(dá)不高,且當(dāng)目標(biāo)無線電靜默時(shí),不能及時(shí)發(fā)現(xiàn)目標(biāo)。目前作戰(zhàn)中,已經(jīng)有自殺式無人機(jī),在鎖定目標(biāo)后,關(guān)閉自身導(dǎo)航和通訊信號(hào),沿著預(yù)設(shè)航路攻擊固定目標(biāo)。聲學(xué),可接收并識(shí)別“低慢小”航空發(fā)動(dòng)機(jī)、旋翼和大氣摩擦所產(chǎn)生的特征聲信號(hào),作為一種特殊方式,在探測(cè)上起補(bǔ)盲作用,應(yīng)用較少。
實(shí)戰(zhàn)中通常依據(jù)具體作戰(zhàn)環(huán)境和使用要求,采用一種或多種探測(cè)方式,多元探測(cè)器協(xié)同,多源傳感器信息融合,為系統(tǒng)提供更有效的多層次探測(cè)能力。
2.2 決策和控制單元及主要手段
決策和控制單元通常為計(jì)算機(jī)軟硬件設(shè)備,從功能流程上來講,可分為以下4個(gè)層次。
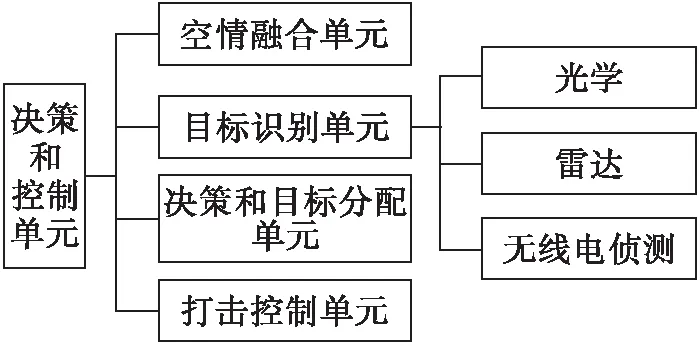
圖3 決策和控制單元及主要手段
2.2.1 空情融合單元
空情融合單元主要用于將各探測(cè)器協(xié)同探測(cè)所得多源目標(biāo)信息進(jìn)行去偽、融合、凝聚、輸出。
對(duì)于單一平臺(tái)而言,由于光電、雷達(dá)等探測(cè)器往往出廠已經(jīng)進(jìn)行軸系一致性的標(biāo)定,采用精度優(yōu)先原則,其空情融合較為簡(jiǎn)單。
對(duì)于多平臺(tái)多源信息關(guān)聯(lián)處理中,由于目標(biāo)信息來源多樣,各信源在分辨精度、信息性質(zhì)、信息類型、信息維數(shù)、信息周期等方面存在差異;同時(shí),各信源信息中包含的目標(biāo)特性不一致、信息含糊或不可靠等現(xiàn)象經(jīng)常出現(xiàn),噪聲和誤差也會(huì)對(duì)關(guān)聯(lián)性能產(chǎn)生不利影響,使得多平臺(tái)信息的關(guān)聯(lián)處理成為融合功能的重要節(jié)點(diǎn)。目前已有各種算法針對(duì)論述。
2.2.2 目標(biāo)識(shí)別單元
目標(biāo)識(shí)別單元依據(jù)目標(biāo)運(yùn)動(dòng)特征如速度、飛行高度、機(jī)動(dòng)性,以及微多普勒信息(雷達(dá)探測(cè))、外形輪廓(光電成像)、敵我(加裝詢問機(jī))等信息,甚至綜合電偵設(shè)備探測(cè)到的來襲目標(biāo)所發(fā)射信號(hào)類型等信息,進(jìn)行來襲目標(biāo)類型及機(jī)型的判斷。該功能由于與探測(cè)手段緊密相關(guān),有時(shí)也集成于探測(cè)單元。
2.2.3 決策和目標(biāo)分配單元
決策和目標(biāo)分配單元主要依據(jù)戰(zhàn)場(chǎng)形勢(shì)和作戰(zhàn)使命任務(wù),通過目標(biāo)威脅度和綜合費(fèi)效比、附帶毀傷等因素,確定目標(biāo)處置和任務(wù)分配方式,包含目標(biāo)處置方式和平臺(tái)移交,即將不同目標(biāo)分配給不同的探測(cè)單元,或配屬的不同處置和打擊設(shè)備。
目標(biāo)威脅度判斷,依據(jù)目標(biāo)的位置、速度、運(yùn)動(dòng)方向、類型、體積、薄弱要害位置等多種因素,確定來襲目標(biāo)威脅度等級(jí)供決策。
目標(biāo)分配是針對(duì)不同來襲目標(biāo)選擇相應(yīng)的攔截手段并按照有效距離、有利方向、有利時(shí)機(jī)完成對(duì)應(yīng)的攔截任務(wù)。
2.2.4 打擊控制單元
根據(jù)目標(biāo)分配單元的決策,對(duì)配屬的武器,通過網(wǎng)絡(luò)、高速串口、總線等通訊方式進(jìn)行火控解算、目標(biāo)導(dǎo)引、指令下發(fā)和輸出。
2.3 對(duì)抗處置單元
常規(guī)對(duì)抗無人機(jī)威脅的方法包括摧毀發(fā)射平臺(tái)、偽裝欺騙、網(wǎng)絡(luò)捕獲、直接火力打擊等。近年來隨著定向能、微波武器、激光武器等新概念武器的發(fā)展,打擊對(duì)抗手段也逐漸多樣化。
從處置結(jié)果來講,可分為軟殺傷和硬殺傷。“軟殺傷”使無人機(jī)某些部件或者器件失效或失能從而失去任務(wù)執(zhí)行能力,但平臺(tái)和載機(jī)本身不受到硬性破壞,如電子干擾、高功率微波武器、電磁脈沖炮、甚至無人機(jī)對(duì)撞等;“硬殺傷”是無人機(jī)工作所需硬、部件直接被打擊或損毀,失去任務(wù)執(zhí)行能力,如小型導(dǎo)彈、密集炮彈、高能激光武器等。現(xiàn)階段,充分利用無人機(jī)的優(yōu)勢(shì)對(duì)抗無人機(jī)的方式也將平臺(tái)從地面轉(zhuǎn)換到空中,如無人機(jī)網(wǎng)捕、無人機(jī)對(duì)撞及加裝微波輻射設(shè)備近距離摧毀等。2021年11月,北約已經(jīng)成功演習(xí)定位、識(shí)別并使用無人機(jī)網(wǎng)捕并帶回等技術(shù)攔截?zé)o人機(jī)系統(tǒng)及蜂群攻擊。
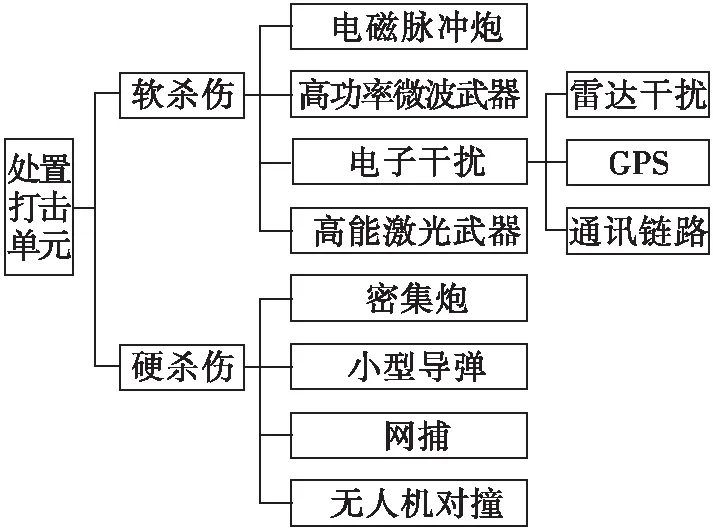
圖4 對(duì)抗處置單元及主要手段
使用軟殺傷方式,具有打擊精準(zhǔn)、可光速交戰(zhàn)、同時(shí)殺傷多個(gè)目標(biāo)、作戰(zhàn)效費(fèi)比高、附帶損傷小等優(yōu)勢(shì)。干擾反制設(shè)備通常從通信(干擾無人機(jī)上行控制鏈路和圖像回傳下行鏈路)、GPS(干擾無人機(jī)機(jī)載定位系統(tǒng),使其失去位置信息,不能執(zhí)行任務(wù))、雷達(dá)(干擾雷達(dá)探測(cè)工作)等方面進(jìn)行。而高功率微波、激光武器、以及電磁輻射等打擊手段可在極短時(shí)間內(nèi)通過天線或者孔徑定向輻射高功率微波或激光、電磁脈沖等,形成功率高、能量集中、且具有方向性的微波、激光射束,干擾或者損壞目標(biāo)設(shè)備的電子元器件,使其失去效能。既可針對(duì)單個(gè)目標(biāo)形成窄波束精準(zhǔn)打擊目標(biāo),不影響己方目標(biāo),又可通過數(shù)字波束形成寬波束,且轉(zhuǎn)換速度快,可在廣闊區(qū)域消除多個(gè)目標(biāo),實(shí)現(xiàn)“一掃一大片”的毀傷效果。
對(duì)抗大型無人機(jī),傳統(tǒng)武器導(dǎo)彈、炮彈等能實(shí)現(xiàn)良好的作戰(zhàn)效能;對(duì)付小型無人機(jī),尤其是采用蜂群戰(zhàn)術(shù)的大規(guī)模編隊(duì)無人機(jī)群而言,單一手段就捉襟見肘,應(yīng)多層次、多手段、靈活的構(gòu)建防御體系,實(shí)現(xiàn)多種手段、多層次立體打擊。
3 目前世界上典型反無系統(tǒng)
目前較為成熟的反無人機(jī)系統(tǒng)大多由復(fù)合手段組成,含主被動(dòng)探測(cè)、有源無源探測(cè)設(shè)備、軟硬殺傷等方式結(jié)合,如雷達(dá)、無線電偵測(cè)、光電紅外、以及干擾反制設(shè)備、反無人機(jī)用無人機(jī)等多種手段。
典型系統(tǒng)如以色列拉法爾先進(jìn)防務(wù)系統(tǒng)公司的“無人機(jī)穹”系統(tǒng)(圖5所示)包含RPS-42 S波段多任務(wù)半球形雷達(dá)、MEOS光電/紅外監(jiān)視套件、通信套件及C-“警戒”RD干擾裝置和“聯(lián)網(wǎng)感知”寬頻帶探測(cè)傳感器系統(tǒng),及定向能硬殺傷攔截能力。

圖5 拉法爾公司“無人機(jī)穹”反無人機(jī)系統(tǒng)
美國(guó)雷聲公司推出“郊狼”(Coyote)無人機(jī)和KRFS先進(jìn)雷達(dá)組成反無人機(jī)系統(tǒng)(圖6所示),“郊狼”無人機(jī)配裝一個(gè)先進(jìn)的導(dǎo)引頭和一個(gè)戰(zhàn)斗部,與工作在Ku波段、能夠捕獲并精確跟蹤各種尺寸無人機(jī)威脅的KRFS有源相控陣?yán)走_(dá)一起,能夠識(shí)別和消滅威脅無人機(jī)。該系統(tǒng)近期已經(jīng)在美國(guó)陸軍舉辦的一場(chǎng)系統(tǒng)測(cè)試中成功擊敗無人機(jī)蜂群。

圖6 雷聲公司“郊狼”無人機(jī)(右下角)和 KRFS先進(jìn)雷達(dá)(中間)反無人機(jī)系統(tǒng)
以色列宇航工業(yè)公司開發(fā)了用于探測(cè)、跟蹤并壓制無人機(jī)的新型“無人機(jī)護(hù)衛(wèi)者”系統(tǒng)(圖7所示),其最新一代系統(tǒng)增加了通信情報(bào)功能,并升級(jí)了3D雷達(dá)、光電和干擾系統(tǒng),可有效干擾或破壞無人機(jī)的控制通道和導(dǎo)航系統(tǒng)。
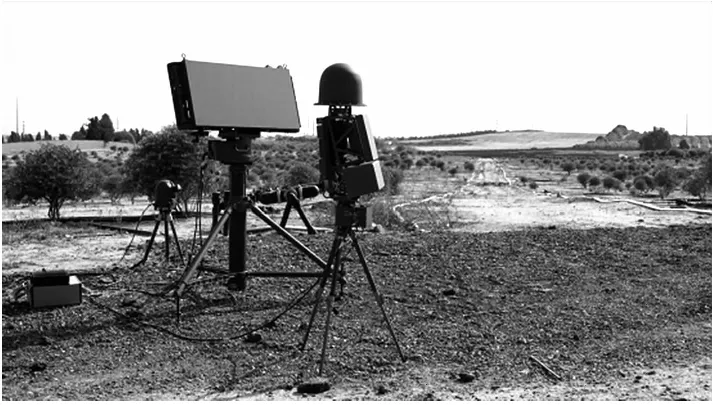
圖7 以色列“無人機(jī)護(hù)衛(wèi)者”系統(tǒng)
英國(guó)布萊特監(jiān)控系統(tǒng)公司、切斯動(dòng)力公司和恩特普賴斯控制公司聯(lián)合研制出一款集合了探測(cè)、跟蹤和干擾能力的“反無人機(jī)防御系統(tǒng)”(AUDS)(圖8所示),由4頻段射頻抑制/屏蔽系統(tǒng)、光學(xué)干擾器和快速部署模塊組成,能夠在8km內(nèi)探測(cè)、跟蹤、識(shí)別和干擾壓制無人機(jī)。

圖8 英國(guó)開發(fā)的反無人機(jī)防御系統(tǒng)(AUDS)
MBDA公 司 推 出 “天空守望者”(Sky Warden)(圖9所示),主要分系統(tǒng)包括:傳感器、軟殺傷效應(yīng)器和硬殺傷效應(yīng)器,傳感器部分使用了瑞典薩伯公司的Giraffe 1X雷達(dá)、CERBAIR公司的無源射頻傳感器、遠(yuǎn)程光電傳感器;軟殺傷效應(yīng)器使用了OPENWORKS公司的Skywall無人機(jī)捕捉網(wǎng)、KEAS公司的射頻干擾機(jī)、TELEDYNE e2v公司高功率微波武器;硬殺傷效應(yīng)器使用了 MBDA 公司 Mistral 導(dǎo)彈和 cilashelma 公司的激光武器。
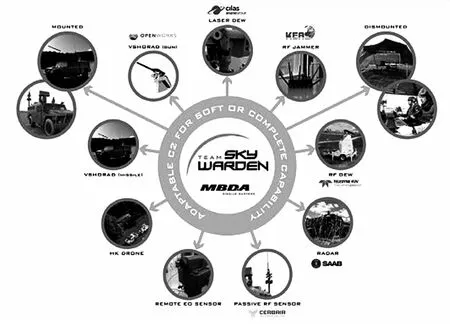
圖9 Sky Warden系統(tǒng)組成
4 反無中雷達(dá)技術(shù)發(fā)展和方向
通常提到的無人機(jī)指表1中1、2、3級(jí)“低慢小”航空器。反無系統(tǒng)中雷達(dá)主要用于目標(biāo)探測(cè)和識(shí)別。

解決辦法首先要提高系統(tǒng)分辨力,使目標(biāo)和雜波落入不同分辨單元。空間角度上,可通過提高波束指向精度來實(shí)現(xiàn),如提高探測(cè)頻段、使用較大陣面。空間距離上增加信號(hào)帶寬,實(shí)現(xiàn)良好距離高分辨力。
其次增加波束駐留時(shí)間,即增加波束對(duì)目標(biāo)的照射時(shí)間,實(shí)現(xiàn)長(zhǎng)時(shí)相干積累,可以增加速度維多普勒通道分辨力。
再次對(duì)于無人機(jī)蜂群目標(biāo)采用兩維有源相控陣AESA技術(shù),在實(shí)現(xiàn)長(zhǎng)時(shí)駐留的同時(shí)實(shí)現(xiàn)系統(tǒng)多目標(biāo)能力。對(duì)于多個(gè)方向來襲目標(biāo),采用多面陣協(xié)同探測(cè)的方式。AESA還具有多任務(wù)能力,可實(shí)現(xiàn)多功能雷達(dá)技術(shù)。
在識(shí)別上,除使用傳統(tǒng)目標(biāo)多普勒、信噪比、強(qiáng)度等信息外,還可使用目標(biāo)微多普勒特性從信號(hào)級(jí)進(jìn)行目標(biāo)識(shí)別,以及人工智能機(jī)器學(xué)習(xí)等方法從點(diǎn)跡信息進(jìn)行識(shí)別。
5 結(jié)束語
無論是無人機(jī)的發(fā)展還是反無人機(jī)的探測(cè)和處置,都是今后較長(zhǎng)一段時(shí)間內(nèi)世界各國(guó)關(guān)注的重點(diǎn)。傳統(tǒng)手段和雷達(dá)技術(shù)的發(fā)展,再結(jié)合人工智能等新興學(xué)科的日益發(fā)展,必將給作戰(zhàn)方式帶來更新的發(fā)展和變化。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32