基于RFID技術的可編程指令卡小車設計與實現
2022-04-27 12:24:26李睿勛陳澤昕康曉杰
自動化與儀表 2022年4期
關鍵詞:指令
徐 微,李睿勛,陳澤昕,康曉杰
(西安交通大學城市學院 電氣與信息工程系,西安 710018)
隨著數字化時代的發展,人們越來越重視基于人工智能的編程教育的發展[1-2]。對于低年齡段兒童,編程智能車是編程教育中的重點內容[3],利用編程智能車進行路徑規劃是編程智能車課程體系中的重要組成部分,可以培養學生的動手能力和邏輯思維能力[4]。目前市面上的編程教學智能車主要采用顏色傳感器識別不同顏色的紙質指令貼進行路徑規劃[5-8],顏色傳感器受環境影響較大,識別精度較低,并且顏色紙質指令貼容易撕毀難以重復使用,導致維護成本增加及資源浪費,因此有必要開發一種精度高可重復使用的可編程拼裝智能車。
針對傳統編程智能小車弊端,本文開發了一種采用射頻識別技術的指令卡識別智能車,其利用卡號進行識別實現路徑規劃,具有識別速度快、精度高、可重復使用、受環境影響較小等優點[9-11]。目前在編程領域市面上沒有采用相關技術開發的智能車。
1 系統整體框架
基于射頻識別技術的可拼裝編程智能車,除了要實現對黑色路徑的跟隨行駛還要對路徑節點上的指令卡進行識別以執行相應的轉向動作,并且可以自動對行駛路線進行修正,防止轉彎時跑偏。因此本系統采用STEM32 單片機作為主控芯片,利用L298N 驅動模塊,控制電機正反轉,實現小車的前進后退及轉向功能;利用紅外循跡模塊實現對路徑的識別跟隨;利用射頻識別模塊實現對小車運行方向控制及路徑規劃。將紅外傳感器及射頻識別模塊采集到的參數反饋給控制器進行調節,實現對行進路線的修正。系統整體框架如圖1所示。
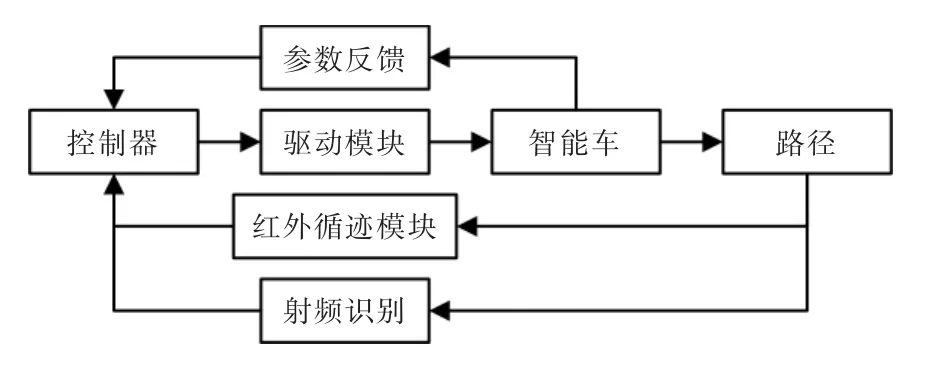
圖1 系統結構圖Fig.1 Structure diagram of control system
2 系統硬件設計
為了實現系統功能,硬件結構如圖2所示。包含控制器、WiFi 模塊、按鍵模塊、霍爾測速模塊、電機驅動模塊、射頻識別模塊、紅外循跡模塊等,各模塊采用常見電路結構[12-14],共同協調實現對路徑識別及規劃的需求。
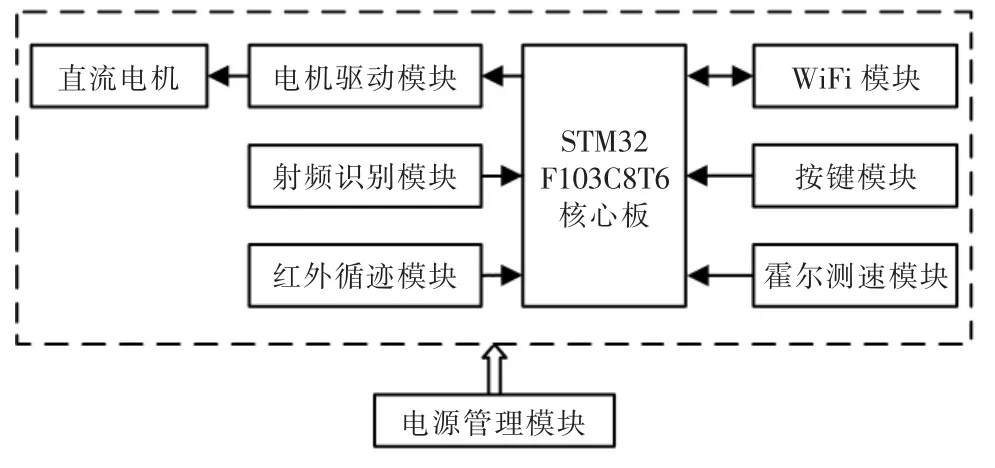
圖2 系統硬件設計原理框圖Fig.2 Schematic block diagram of system hardware design
2.1 射頻識別模塊
RFID 射頻識別技術可以快速地進行數據交換,通過放置閱讀器進行檢測,在標簽進入閱讀器后,接收閱讀器發出的射頻信號,憑借感應電流所獲得的能量發送出存儲在芯片中的信息[15],其原理圖如圖3所示。本設計采用MFRC522 射頻識別模塊,利用射頻卡卡號作為指令入口,將不同編號的指令卡放置于九宮格路徑節點,當閱讀器讀取到指定卡號時小車執行對應指令對小車行進方向進行控制,可實現對路徑的規劃。
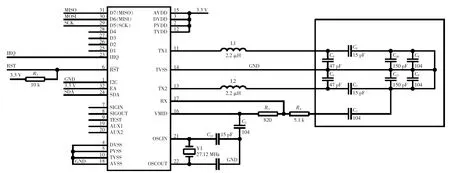
圖3 射頻識別模塊原理圖Fig.3 Schematic diagram of RFID module
2.2 紅外循跡模塊
路徑識別跟隨采用紅外循跡模塊,在小車底部安裝多個循跡模塊進行檢測,通過紅外傳感器反饋的信號判斷小車的行駛狀態,其原理圖如圖4所示。采用帶隔板的紅外發射管和接收管垂直安裝在小車底部,當未檢測到黑線時接收管可以接收到發射管發射的信號,傳感器輸出高電平,當檢測到黑線時接收管收到微弱的信號,傳感器輸出低電平,從而實現對黑色路徑的識別與跟隨[16]。
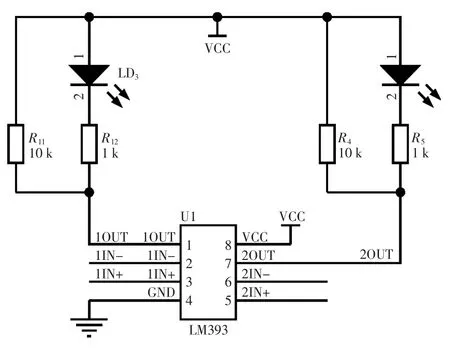
圖4 紅外循跡模塊原理圖Fig.4 Schematic diagram of infrared tracking module
3 系統軟件設計
編程小車軟件程序部分由小車行駛控制程序、紅外循跡程序、指令卡識別程序、及WiFi 控制程序等組成,程序關鍵部分如圖5所示。系統啟動后設備初始化,開始檢測指令卡,當檢測到啟動指令卡后小車前進,啟動后未檢測到指令卡時小車保持直行,紅外循跡模塊采集路徑信息反饋到單片機進行處理,以保證小車不會偏離路徑,當再次檢測到指令卡時小車執行相應的方向控制指令,執行完畢后重新檢測路徑直線行駛,直到檢測到停止指令卡時小車停止。通過此控制程序可以實現對小車行駛路徑的識別與規劃。針對這一特點可以面向低齡段兒童開發編程啟蒙課程,根據課程任務要求將不同功能指令卡擺放在九宮格路徑節點上,完成任務目標。以路徑規劃訓練邏輯思維,通過指令卡可以很方便地對小車進行自動控制,降低學習成本,提升學習興趣。
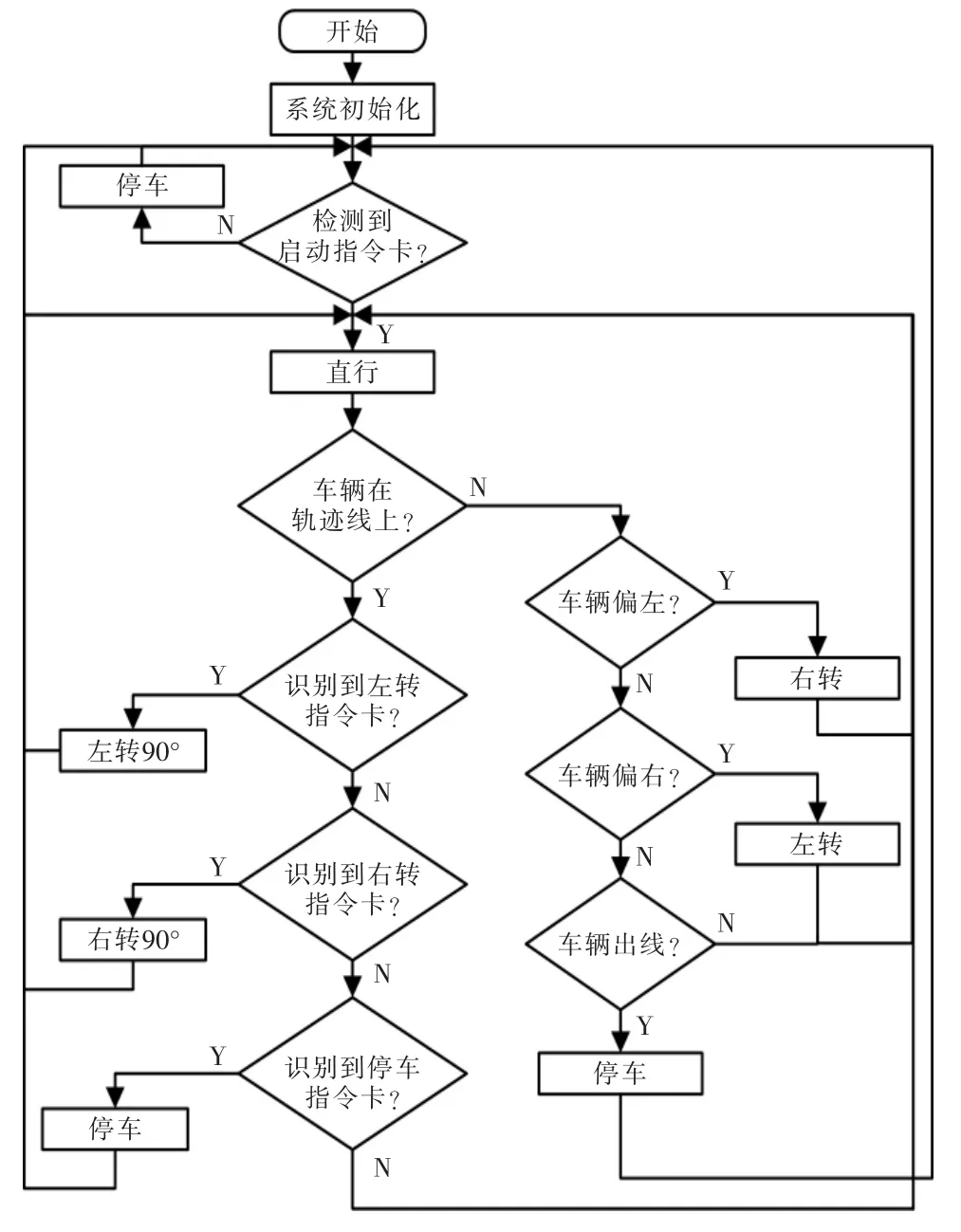
圖5 射頻識別及紅外循跡程序流程圖Fig.5 RFID and infrared tracking program flow chart
4 系統調試結果
4.1 硬件調試結果
在車架上安裝電源模塊、WiFi 模塊、按鍵模塊,在車身正面安裝控制器,背部安裝射頻識別模塊及紅外循跡模塊等,并進行功能測試,搭建實物如圖6所示。
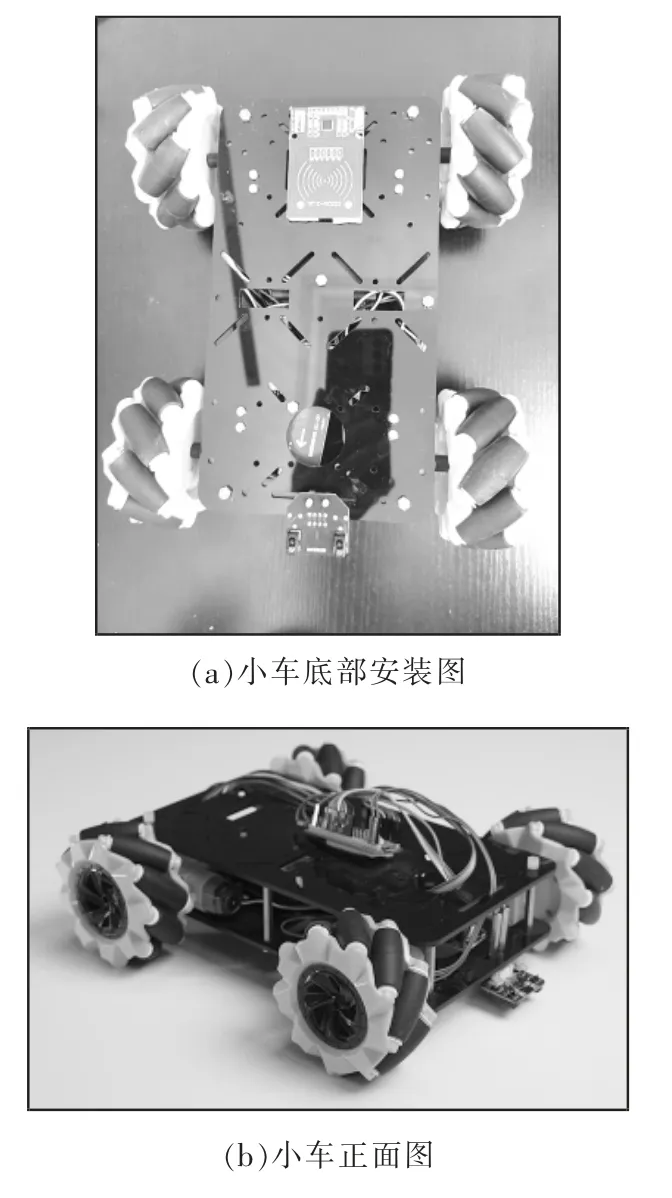
圖6 小車實物圖Fig.6 Physical drawing of trolley
4.2 軟件調試結果
采用紅外傳感器進行循跡,通過傳感器狀態控制小車運行,經測試傳感器狀態與小車運行狀態,與程序運行邏輯一致,測試結果如表1所示。傳感器狀態為(0,0)時,小車直行,傳感器狀態(0,1)時,小車左轉,傳感器狀態(1,0)時,小車右轉,傳感器狀態(1,1)時,小車停止,實現了對九宮格黑色路徑的跟隨。
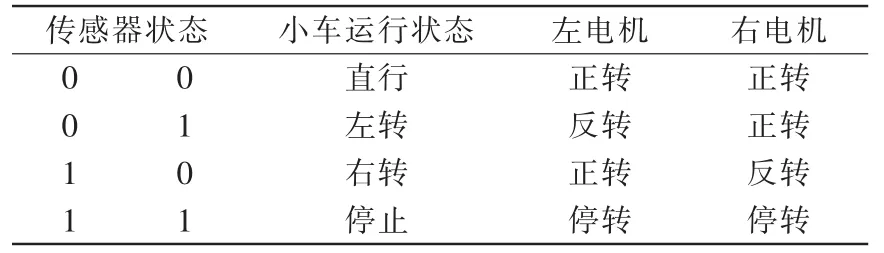
表1 傳感器狀態與小車運行狀態調試結果表Tab.1 Commissioning results of sensor status and trolley operation status
采用RFID 射頻識別模塊對路徑節點指令卡進行識別,在程序中將指令與射頻卡卡號進行綁定,當閱讀器檢測到相應卡號時執行相應指令實現對小車運行方向的控制。經測試在小車運行過程中檢測到指令卡時可以立即停止當前動作并執行對應指令,實現小車運行方向的控制。
4.3 系統整體調試結果
系統路徑規劃原理如圖7所示,小車在九宮格區域行駛,在路徑節點上擺放指令卡,當檢測到不同指令卡時執行不同動作,紅外循跡模塊保證小車按路徑行駛,可以在路徑上放置不同的任務目標,引導學生進行路徑規劃,以達成任務目標的形式開發課程,將小車用于教學。搭建九宮格對編程智能車進行路徑規劃如圖8所示。這里采用8 張指令卡,指令卡包含相應的動作指令(啟動,停止,右轉,直行,左轉),小車起點和終點在九宮格上可以任意設定。小車啟動電源,識別到啟動指令卡,開始沿著九宮格路徑直行,識別到右轉指令卡后,右轉,在九宮格上方路徑一個交叉口,識別到右轉指令,小車右轉后直行,在十字交叉口,識別到直行指令,繼續直行行進,沿著此路徑,在第二個十字交叉口,識別到左轉指令,小車左轉直行,第三個十字交叉口,識別到直行指令卡,小車繼續直行,在九宮格右側路徑交叉口,識別到右轉指令,右轉直行后,識別到停止指令卡,小車停止運行。
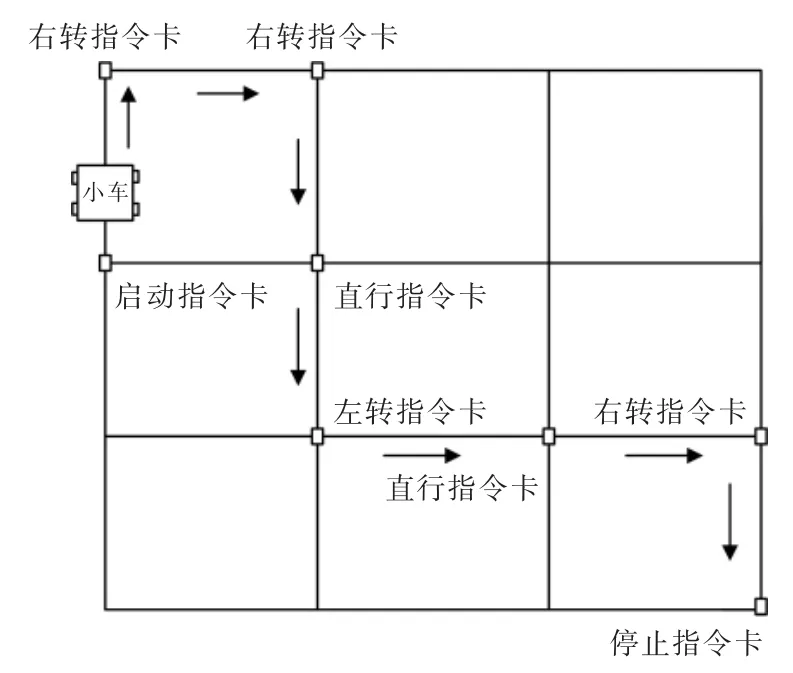
圖7 編程小車路徑規劃原理圖Fig.7 Schematic diagram of programming with instruction card to realize path planning
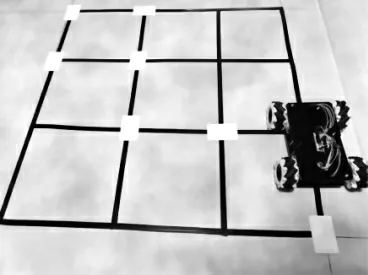
圖8 小車九宮格軌跡循跡測試Fig.8 Tracking test of the car’s Jiugongge trajectory
通過系統調試,本文所設計的軟硬件系統可以較好地實現小車的循跡及路徑規劃,經測試系統運行穩定,識別精度高達99%,響應速度速快。
5 結語
基于射頻識別技術的編程教學小車可以準確地按照九宮格黑色路徑行進,并對路徑上的方向指令卡快速地進行識別以執行相應的方向控制,指令卡可重復使用,識別精度高達99%。解決了傳統編程小車指令貼紙利用率低等問題,利用本系統所設計的編程小車開發邏輯思維訓練課程,引導學生根據課程任務將指令卡放置到九宮格節點上完成目標,可以對學生邏輯思維能力進行鍛煉。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
