基于機載LiDAR的電塔點云提取與重建
2022-04-27 13:25:38占曉明
地理空間信息 2022年4期
關鍵詞:模型
占曉明
(1.浙江華東測繪與工程安全技術有限公司,浙江 杭州 310014)
電塔是輸電線路中支撐導線的重要裝置,按期對電塔進行巡檢是確保電網安全穩定運行的重要環節,同時,建設智慧電網也需要來對電塔進行定位提取和建模,傳統的電力線路巡檢主要依靠人工來進行,但這種方式耗時長、效率低且具有一定的危險性[1]。近年來,隨著自動、便捷、高效的機載雷達測量技術(LiDAR)逐步發展,人們開始逐漸將其應用到電力線路的巡檢中,通過對掃描得到的電力線路點云進行處理可以實現電塔點云的提取和重建[2]。
目前,針對電塔LiDAR點云提取和重建的研究較少,所取得的成果也較有限,而且一般只是針對電塔點云提取或者電塔模型重建進行單獨研究[3]。針對目前研究存在的問題,本文基于機載LiDAR點云,提出一種綜合點云預處理、地面點濾波、電塔點云定位獲取以及電塔結構線建模的電塔點云提取與重建方法,研究成果為機載LiDAR測量技術在電塔點云提取和重建的應用提供技術支撐。
1 機載LiDAR電塔點云提取
1.1 點云數據預處理及濾波
1.1.1 點云去噪和回波次數判斷
機載LiDAR系統掃描的原始點云數據中會存在粗差也就是噪聲點,其主要分為低位誤差和和高位誤差兩種,一般數量較少且以孤立形式分布[8]。由于噪聲點特別是低位噪聲點會對點云濾波產生影響,因此,在濾波前需對點云進行去噪,本文根據噪聲點分布的特點,采用高程分布直方圖法進行去噪處理[9]。
機載LiDAR系統掃描的點云數量較大,其中不僅包含電力線和電塔點云,還包含樹木植被、建筑物以及地面等點云,因此在濾波處理時會耗費大量時間。由于LiDAR系統發射的激光具有一定的穿透性,這就會使得系統能接收到同一發射激光返回的多次回波信號,通過對不同屬性點云的回波次數特點進行分析,發現地面點一般存在于單次回波以及多次回波的末次回波集合中[10]。為了減少濾波算法的耗時,本文利用回波次數先提取出地面點所在集合,再對該集合中的點云使用濾波算法進行處理。
1.1.2 漸進三角網加密濾波
架設電塔的電力線路一般位于地形起伏的山區之中,這就加大了濾波的難度。目前常用的濾波算法有曲面擬合濾波、區域生長濾波、形態學濾波以及漸進三角網加密濾波等[11],不同的濾波算法有其各自的優缺點,其中漸進三角網加密濾波比較適合處理地形起伏較大的點云數據且濾波的精度較高,其缺點是比較耗時,但本文在濾波前已經對點云數據進行了預處理,算法的耗時也會減少。漸進三角網加密濾波的示意如圖1所示,圖中P1~P3為地面種子點,P4是待判斷點,待判斷點到不規則三角網中對應的三角形的距離設為ρ,β1~β3分別為各地面種子點與待判斷點的連線與地面種子點形成的平面夾角。其中,地面種子點是點云格網劃分后各格網內的最低點,不規則三角網(triangulated irregular network,TIN)模型是以地面種子點根據狄洛尼準則構建得到的。通過遍歷待判斷點的距離和角度閾值對于TIN模型不斷更新,當達到規定的迭代次數或者TIN模型不再更新時,算法結束,此時構成TIN模型的點就是濾波得到的地面點。
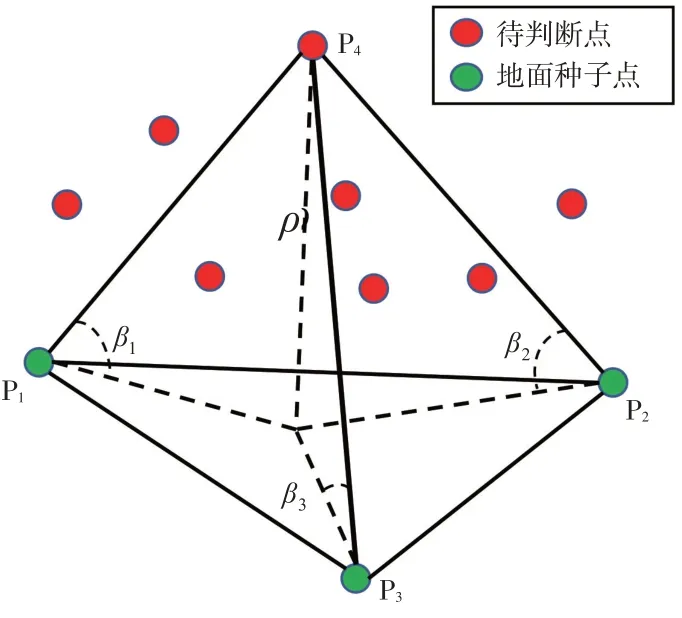
圖1 漸進三角網加密濾波
1.2 電塔點云提取
1.2.1 電塔分段點云定位
將濾波后的地面點集合從預處理后的點云數據中去除,然后用垂直平面按一定間隔對電力線路進行分段,分段間隔取電塔邊長,這樣能夠使電塔點云最多只存在于相鄰的2個分段內。由于包含電塔中心位置點云的分段在每一個高程區間內都有點云存在,因此可以通過高程連通性判斷出電塔中心位置所在分段。又由于分段時電塔點云可能被分在相鄰的兩個分段內,因此將電塔中心位置分段與其左右兩個相鄰分段都作為電塔點云的候選分段。
1.2.2 電塔聚類塊點云確定
對于得到的候選分段點云,由于建筑物,樹木以及電塔點云都是分布較集中的,因此將其投影到XOY水平面上時,也會呈現聚集的分布。對此,本文采用密度聚類算法對不同屬性的投影點云進行聚類。密度聚類算法的優點是不需要事先確定初始的聚類數目,其核心思想是通過判斷各點鄰域內的點云密度來建立密度的連通性,從而達到將距離相近的點云合并到同一個聚類塊的目的,其具體方法可以參考文獻[12]。
密度聚類算法可以將投影到XOY水平面上的電塔分段點云分成不同的聚類塊,但還需要從各聚類塊中確定包含電塔點云的聚類塊。由于電塔點云聚類塊中的點云最大高程差大于建筑物和樹木等點云聚類塊的,因此本文根據此特點對電塔點云聚類塊進行確定。
1.2.3 電塔點云提取
通過上述處理后得到的電塔點中還包含部分電力線點,為了完整準確地提取電塔點云,需要去除電塔聚類塊點中的電力線點。為此,本文使用生長算法[13]對電力線點進行自動識別和生長去除。算法首先對電塔點云聚類塊以較小的間隔進行二次分段,然后在高程方向上進行高程區間劃分,并判斷各高程區間內是否都有點云,若不是,則此分段是包含電力線點云的分段,然后從上往下對此分段進行區間遍歷,將搜索到的位于同一高程范圍內的點云作為一根電力線的種子點,直至搜索到等同于電力線數量的電力線種子點為止。由于同一根電力線上的相鄰點距離較近且兩者高差較小,因此可以基于電力線種子點根據距離和高差閾值進行生長,直至完成所有電力線點的生長,就得到了所有的電力線點。將電力線點從電塔點云聚類塊中去除,就可以得到準確完整的電塔點云。
2 基于霍夫變換的電塔結構線重建
電塔的形狀各異且細節結構很多,這使得參數化電塔建模的方法有一定的難度且比較繁瑣,本文提出的電塔重建算法是基于電塔模型由各個結構線組成的假設之上的,通過霍夫變換提取出電塔點云中位于同一直線上的點,并利用最小二乘法擬合得到其結構線,最后將結構線在空間進行組合就可以得到電塔的結構線模型。
霍夫[14-15]變換的核心思想是將平面點映射到霍夫參數空間,使得平面中的點對應成霍夫空間中的一條正弦曲線,利用霍夫變換提取直線就是求取霍夫空間中各正弦曲線的交點,交點信息對應著平面中位于同一直線上點擬合直線的參數。
將提取到的完整電塔點云投影到XOY水平面上,使用霍夫變換提取其直線點云,設置直線提取的閾值為直線段的長度和位于此直線上的點云數量。使用霍夫變換時需要注意投影到XOY面上的點云有可能是重合的,這就使得提取到的在XOY面上同一直線上的點云在空間中位于同一平面上,如圖2所示。因此,需要將提取到的在XOY面上位于同一直線上的點云再投影到XOZ面或者YOZ面上進行二次霍夫變換提取,這樣提取到的位于同一直線上的點云在空間中才會是位于同一直線上的,在二次霍夫變換的時候也需要設置直線段長度和點云數量閾值,然后將經過2次霍夫變換且符合閾值條件的點云進行最小二乘擬合得到構成電塔的結構直線,最后利用首尾點云位置確定電塔的結構線段。將所有提取到的結構線段在空間中進行組合和調整就可以得到最終的電塔結構線模型。
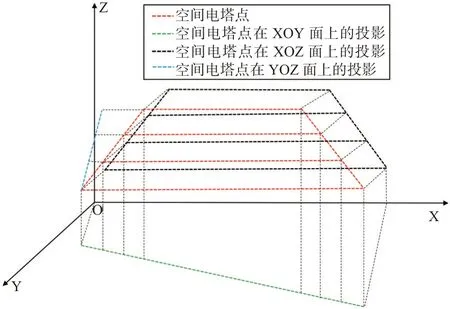
圖2 提取的電塔點云的空間分布情況
3 工程實例及精度評定
3.1 數據源
為了驗證本文提出的電塔點云提取和結構線模型重建算法的可行性,采用某電力線路機載LiDAR掃描數據進行實驗。此電力線路測區的面積約為37 940 m2,共掃描點云數量為1 645 758個,點云密度約為43.6個/m2。測區內地形起伏較大、植被茂密,共有三座電塔,其上掛載了8根電力線。對電力線路的原始點云進行去噪和點云回波次數判斷處理得到的點云圖像如圖3所示。

圖3 去噪和回波次數判斷后的點云圖像
3.2 實例計算
進行漸進三角網加密濾波時,以測區內最大建筑物即電塔邊長的12 m作為格網邊長對測區進行規則格網劃分,以各格網內的最低點作為地面種子點依據狄洛尼準則構建TIN模型,設置加密的距離閾值為0.5 m,角度閾值為15°。最終濾波處理得到的地面點和非地面點的圖像如圖4所示。
a地面點 b非地面點
對經過濾波處理后的非地面點云進行分段處理,分段的間隔為電塔的邊長,通過高程連通性判斷得到的包含電塔點云的候選分段點云,如圖5所示。
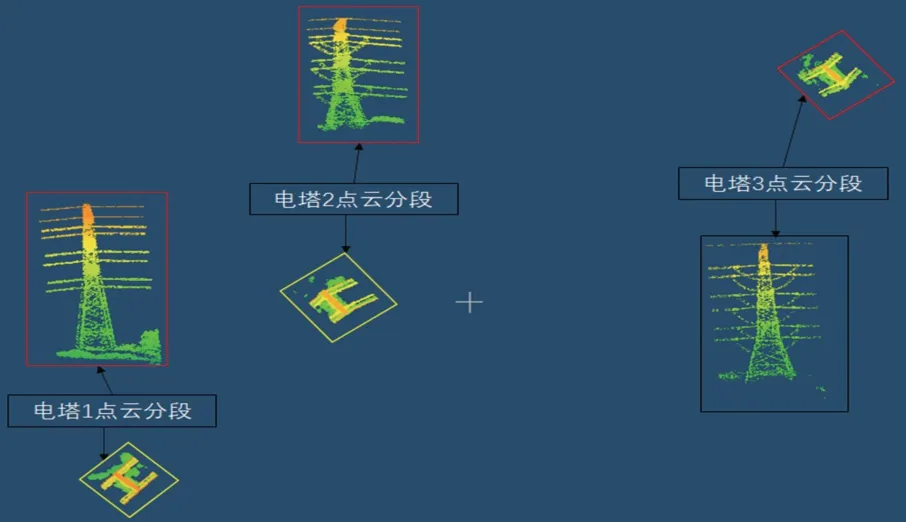
圖5 高程連通性判斷得到的包含電塔的候選分段點云
使用密度聚類算法對不同屬性的點云塊進行聚類,再利用高程差性質對所有點云聚類塊進行判斷,最終提取到的電塔點云聚類塊如圖6中的紅色點云聚類快所示。
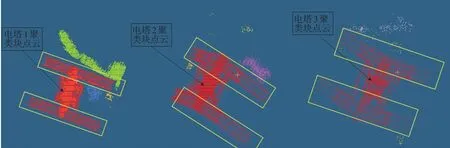
圖6 提取到的不同電塔點云的聚類塊圖像
密度聚類算法得到的電塔點云聚類塊中還包含了部分的電力線點,如圖10中的黃色方框的點云,因此再對其使用生長算法去除,二次分段的間隔為1 m,分層的間隔為0.5 m,生長的距離閾值和高差閾值分別是0.1 m和0.05 m,去除電力線點后得到的完整準確的電塔點云圖像如圖7所示。
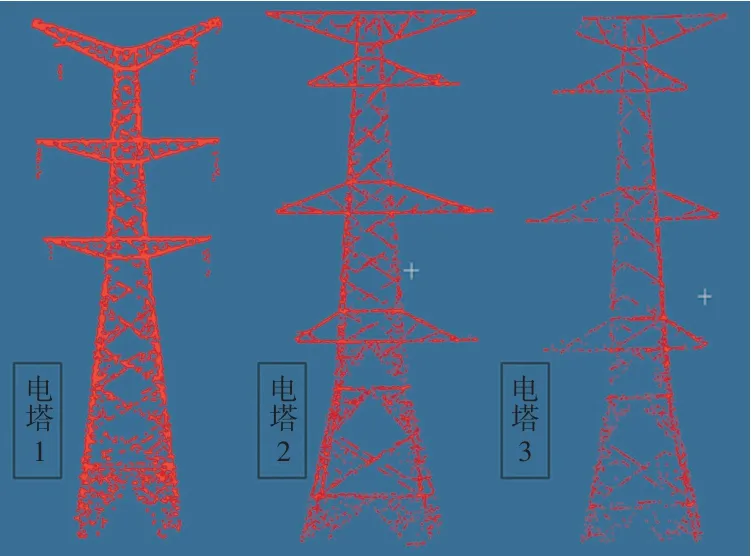
圖7 提取到的電塔完整點云
將得到的電塔點云投影到對應的參考平面上,然后使用兩次霍夫變換提取在空間中位于同一直線的點云并使用最小二乘擬合出對應的直線,最后根據直線上的首尾點云位置確定直線段。將提取得到的所有直線段在空間中進行組合調整就可以得到電塔結構線模型。
3.3 精度評定
目前,針對電塔點云提取和模型重建算法的性能評價還沒有明確的準則,本文主要依據電塔點云提取完整率、提取效率、電塔重建模型的精度以及重建效率這4個方面對算法進行評價。對于電塔點云提取完整率,則通過參照人工提取的電塔點云數量對其進行分析。對于電塔重建的精度,本文用電塔各頂點的實際位置與重建模型位置的最大距離Lmax、最小距離Lmin以及平均距離Lmean來表示,電塔點云提取和模型重建的效率主要通過耗時來表示。表1表示的是本文實驗數據中三座電塔提取完整率和耗時的統計結果,表2表示的是各電塔模型重建的精度和效率的統計結果。
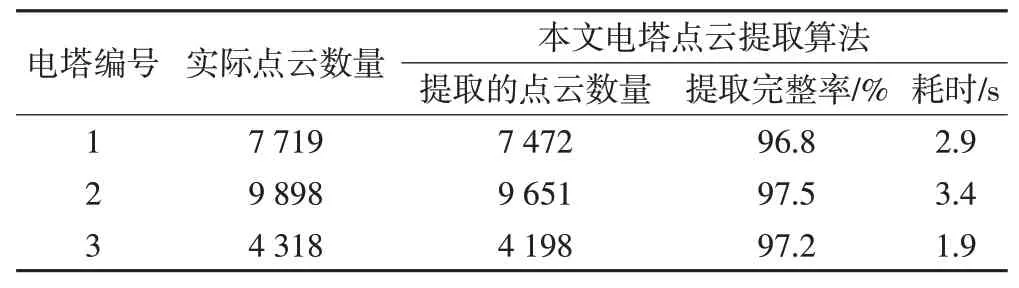
表1 各電塔點云提取的完整率及耗時
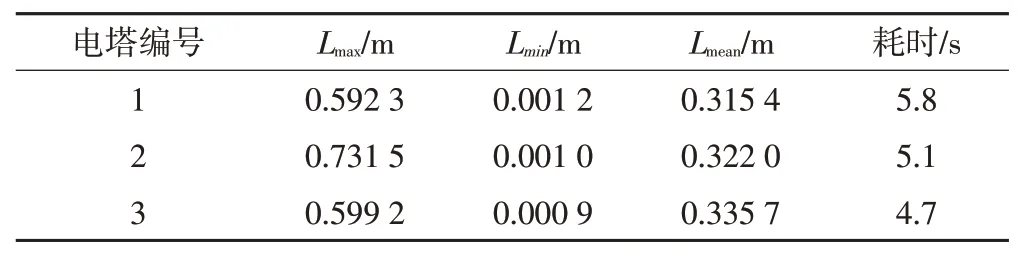
表2 各電塔重建模型精度和耗時
由表1可知,本文研究的電塔點云提取算法對電塔點云具有較高的提取完整率,平均的提取完整率達到了97.2%,對電塔3這種掃描點云不完整的電塔依然具有較高的提取完整率,這說明本文算法具有較高的穩定性和普適性。從耗時統計項可以看出,算法耗時主要和電塔的點云數量有關,但總體上看,本文算法具有較高的提取效率。
由表2可知,本文提出結構線重建算法對電塔重建具有較高的重建精度,其統計得到的Lmax、Lmin和Lmean都較小。在重建效率方面,本文算法和電塔的點云數量成正比關系,電塔的掃描點云越多,其在檢測直線時花費的時間也就越多,總的耗時也就越長,但是總體看來,本文的電塔重建算法的效率還是比較高的。
4 結語
隨著智慧電網的不斷建設以及電力線路巡檢效率要求的不斷提高,基于機載LiDAR的電塔點云提取與重建已經得到了越來越廣泛的運用,本文在深入分析已有的電塔點云提取與重建算法的基礎上,提出一種綜合點云預處理、地面點濾波、電塔點云定位獲取以及電塔結構線建模的電塔點云提取與重建方法,通過實測數據進行實驗,驗證了本文算法在電塔點云提取與重建時的準確性和高效性,適用于對基于機載LiDAR電塔點云的提取與重建。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
