基于粒子群算法的公共自行車調(diào)度優(yōu)化問(wèn)題
2022-04-29 05:43:04岳曉鵬全啟圳何月華
科技創(chuàng)新與應(yīng)用 2022年10期
關(guān)鍵詞:模型
岳曉鵬,全啟圳,何月華
(許昌學(xué)院 數(shù)理學(xué)院,河南 許昌 461000)
1 問(wèn)題背景
近年來(lái),公共自行車作為一種新的交通方式,得到了越來(lái)越多人的支持與認(rèn)可。公共自行車在使用過(guò)程中不會(huì)對(duì)環(huán)境形成任何污染,節(jié)能環(huán)保,與此同時(shí),隨著廣大市民環(huán)保認(rèn)識(shí)的提升,大家逐漸更注重生活品質(zhì),更愿意選擇健康綠色的交通方式,共享單車這一交通方式的出現(xiàn)在某種程度上滿足了人們對(duì)于綠色出行的需要。
目前,針對(duì)公共自行車調(diào)度方面的研究較少。蔣塬銳[1]等針對(duì)共享單車供需失衡、共享率低等困難,提出了目標(biāo)為最小成本的共享單車靜態(tài)調(diào)度模型,并利用單親遺傳算法求解;趙曼[2]對(duì)共享單車網(wǎng)絡(luò),采用社會(huì)網(wǎng)絡(luò)分析法,提出了特征量和凝聚子群,得到了共享單車的局部最優(yōu)網(wǎng)絡(luò)結(jié)構(gòu),并基于此提出調(diào)度路徑最優(yōu)方案;周傳鈺[3]結(jié)合共享單車的特點(diǎn),考慮了軌道交通站點(diǎn)接駁區(qū)域的單車投放規(guī)模,提出調(diào)度最優(yōu)模型;盧琰[4]結(jié)合不同時(shí)段共享單車的分布特點(diǎn),構(gòu)建混合軸輻式共享單車網(wǎng)絡(luò)結(jié)構(gòu),提出有調(diào)度任務(wù)時(shí)間范圍和無(wú)調(diào)度任務(wù)時(shí)間范圍的調(diào)度優(yōu)化模型,并利用遺傳算法對(duì)模型驗(yàn)證進(jìn)行求解。還有一些學(xué)者利用粒子群算法在智能機(jī)器人路徑規(guī)劃、交通路線設(shè)計(jì)、物流線路規(guī)劃等方面開(kāi)展了應(yīng)用研究[5-9]。
本文在研究公共自行車調(diào)度問(wèn)題及調(diào)度影響因素后,將公共自行車的調(diào)度問(wèn)題類比為旅行商問(wèn)題,設(shè)計(jì)了基于旅行商問(wèn)題的0-1規(guī)劃數(shù)學(xué)模型,并運(yùn)用粒子群算法進(jìn)行模型的求解。
2 粒子群算法的基本原理
2.1 粒子群優(yōu)化算法
粒子群優(yōu)化算法(Particle Swarm Optimization,PSO)在1995年由Kennedy和Eberhart提出。該算法源于對(duì)鳥類捕食行為的研究[10]。粒子群算法首先隨機(jī)地初始化一群均勻分布在給定的尋優(yōu)空間中的粒子(種群規(guī)模一般為30個(gè)),然后所有的粒子根據(jù)2個(gè)極值來(lái)更新自身的速度:一個(gè)是個(gè)體極值P;另一個(gè)是群體極值g。設(shè)粒子群中粒子的總數(shù)為N,粒子的維數(shù)為m,算法的終止條件(即最大迭代次數(shù))為M,第i個(gè)粒子在t時(shí)刻的飛行速度以及位置分別為vi(t)=[vi1(t),vi2(t),...,vim(t)]T和xi(t)=[xi1(t),xi2(t),...,xim(t)]T,而對(duì)于粒子在t時(shí)刻的個(gè)體極值表示為pi(t)=[pi1(t),pi2(t),...,pim(t)]T,同樣可以得到群體極值表達(dá)gi(t)=[gi1(t),gi2(t),...,gim(t)]T,因此所有的粒子按照如下的更新方式在搜索空間中飛行以找到最優(yōu)解。

其中:ω為慣性權(quán)重系數(shù),c1為個(gè)體學(xué)習(xí)因子,c2為社會(huì)學(xué)習(xí)因子。
2.2 粒子群算法的求解流程
Step1:設(shè)置種群規(guī)模、變量范圍、慣性權(quán)重、學(xué)習(xí)因子等參數(shù),并隨機(jī)地初始化一群均勻分布在給定的尋優(yōu)空間中的粒子(包含速度和位置信息)。
Step2:計(jì)算群體中各個(gè)粒子的適應(yīng)度值,設(shè)置第i個(gè)粒子的適應(yīng)度值為它的當(dāng)前個(gè)體極值pi,所有粒子中的最好粒子設(shè)置為群體的全體極值g。
Step3:根據(jù)公式(1)、(2)更新每個(gè)粒子的速度和位置。
Step4:對(duì)所有粒子,將其當(dāng)前的函數(shù)值與它以前找到過(guò)的最好位置進(jìn)行比較,如果當(dāng)前位置較好,則將個(gè)體最優(yōu)位置pi設(shè)置為這個(gè)粒子的位置,然后再對(duì)群體的全局極值g更新。
Step5:判斷給定的終止條件是否滿足。若滿足終止條件,停止搜索,輸出需要的結(jié)果;否則,返回Step3繼續(xù)搜索。
3 模型的建立和求解
3.1 公共自行車的調(diào)度選取
本文主要是研究許昌市東城區(qū)的公共自行車調(diào)度問(wèn)題,因此搜集30個(gè)公共自行車駐放點(diǎn)的地理坐標(biāo),并計(jì)算出各個(gè)駐放點(diǎn)之間的距離,即各個(gè)駐放點(diǎn)的地理坐標(biāo)見(jiàn)表1,其之間的距離見(jiàn)表2(由于駐放點(diǎn)較多,僅展示部分?jǐn)?shù)據(jù))。
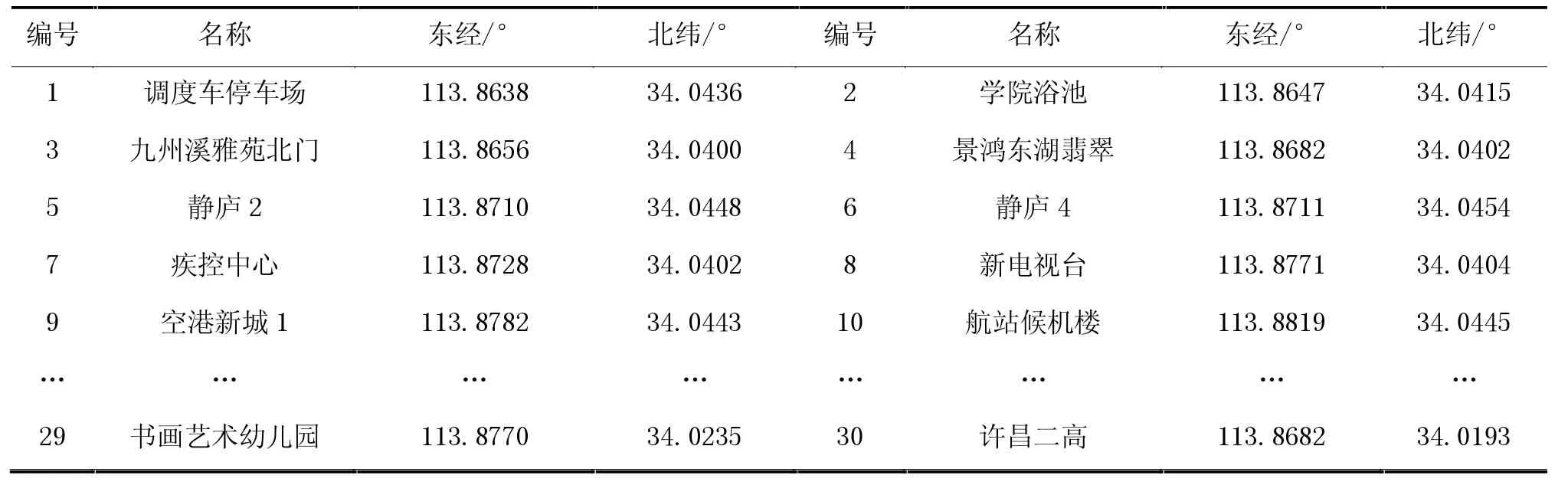
表1 部分駐放點(diǎn)編號(hào)
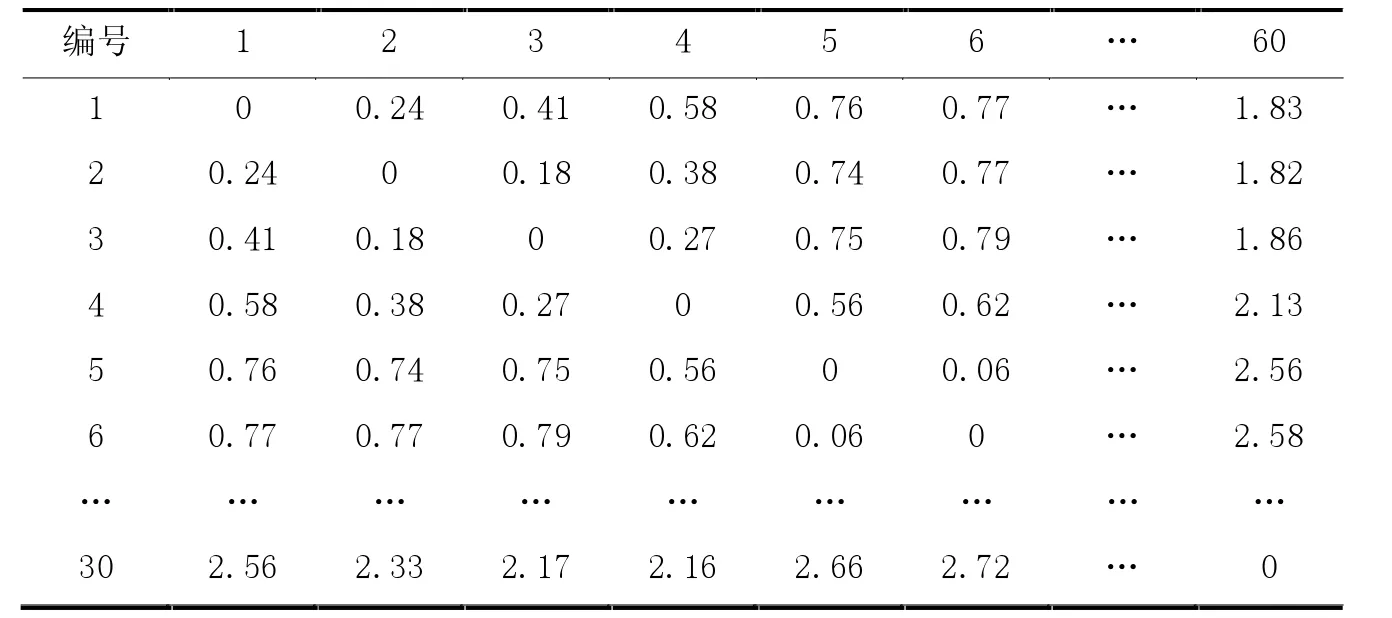
表2 各個(gè)駐放點(diǎn)間的距離 單位:km
3.2 模型假設(shè)
為將該調(diào)度模型轉(zhuǎn)化為數(shù)學(xué)模型,進(jìn)行模型假設(shè),保證一定的準(zhǔn)確性。
(1)在研究對(duì)象范圍內(nèi),僅設(shè)立了1個(gè)車場(chǎng)和1個(gè)調(diào)度車。(2)調(diào)度車必須經(jīng)過(guò)每一個(gè)停靠點(diǎn),并且每一個(gè)停靠點(diǎn)僅能經(jīng)過(guò)1次。(3)為保障能較好地完成調(diào)度,行車速度在40 km/h,裝或卸載3 min。(4)調(diào)度車調(diào)度過(guò)程中,公共自行車輛始終保持充足且不超過(guò)最大載重。
3.3 模型的建立
3.3.1 公共自行車的路程規(guī)劃
本文將調(diào)度問(wèn)題視為0-1規(guī)劃問(wèn)題,建立旅行商問(wèn)題的數(shù)學(xué)模型。首先,需要確定停靠點(diǎn)i和停靠點(diǎn)j是否連通,即調(diào)度車輛從路線xij上經(jīng)過(guò)記為1,否則記為0。

又有調(diào)度車輛最短路徑問(wèn)題,目標(biāo)函數(shù)取最小值,對(duì)所有存在調(diào)度車經(jīng)過(guò)的路徑xij=1的距離dij求和,為此得到以下規(guī)劃模型:

基于問(wèn)題的假設(shè)和實(shí)際的調(diào)度情況,本文對(duì)目標(biāo)函數(shù)進(jìn)行了一定的約束,其(4)(5)式表示調(diào)度車必須經(jīng)過(guò)每一個(gè)停靠點(diǎn),并且每一個(gè)停靠點(diǎn)僅能經(jīng)過(guò)1次;(6)式表示所有的停靠點(diǎn)能且只能作為路線起點(diǎn)和終點(diǎn)各1次。
3.3.2 公共自行車的調(diào)度耗時(shí)計(jì)算
針對(duì)運(yùn)輸車在調(diào)度的過(guò)程中,消耗的時(shí)間主要花費(fèi)在路線耗時(shí)和裝卸自行車上,因此可以得到運(yùn)輸用時(shí)條件:

針對(duì)調(diào)度用時(shí)的計(jì)算,運(yùn)輸過(guò)程的耗時(shí)由(7)式表示,而(8)式則表示裝或卸載公共自行車的時(shí)間,最后由(9)式得到總的時(shí)間。其中e為每個(gè)駐放點(diǎn)的裝或卸載的平均耗時(shí)。
3.4 基于智能算法下的模型求解
由于居民對(duì)于公共自行車的需求時(shí)刻和數(shù)量是隨機(jī)的,為了更好、更快地進(jìn)行調(diào)度,使得公共自行車系統(tǒng)能夠較好地承受需求,先選擇15個(gè)駐放點(diǎn)依次進(jìn)行仿真實(shí)驗(yàn)完成調(diào)度問(wèn)題。模型中的個(gè)體學(xué)習(xí)因子c1=1,社會(huì)學(xué)習(xí)因子c2=0.1,慣性因子ω=0.2,慣性因子最大值ωmax=1,慣性因子最小值ωmin=0.2,粒子數(shù)量N=500,迭代次數(shù)M=1 000進(jìn)行求解,如圖1和圖2所示。
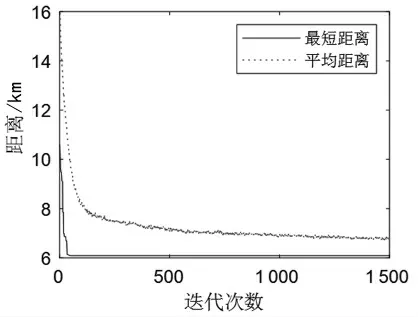
圖1 15個(gè)駐放點(diǎn)各代最短距離與平均距離對(duì)比圖

圖2 15個(gè)駐放點(diǎn)粒子群算法優(yōu)化路徑圖
從圖1可以看出,迭代次數(shù)在75以內(nèi),下降速度快,而在75次以后,狀態(tài)保持平穩(wěn),但對(duì)于各個(gè)粒子的平均距離,在1 000次迭代內(nèi)始終處于保持下降趨勢(shì)與最短距離存在一定的間距。
從圖1可以得到,該模型求解的最優(yōu)調(diào)度運(yùn)輸路線為:1→2→3→13→14→15→4→7→8→10→11→12→9→6→5→1。
因此,從調(diào)度車停車場(chǎng)出發(fā)到最后回到起點(diǎn),依次經(jīng)過(guò)2,3,4,…,6,5,其優(yōu)化總距離為6.09 km,所耗費(fèi)總時(shí)間為0.91 h。
4 靈敏度分析
針對(duì)粒子群算法的參數(shù)設(shè)置,個(gè)體學(xué)習(xí)因子c1,根據(jù)自身經(jīng)驗(yàn)來(lái)計(jì)算粒子飛翔速度的權(quán)重;社會(huì)學(xué)習(xí)因子c2,根據(jù)自群體經(jīng)驗(yàn)來(lái)計(jì)算粒子飛翔速度的權(quán)重;粒子數(shù)量N,粒子數(shù)越多,搜索能力越強(qiáng);慣性因子,其值較大時(shí),全局尋優(yōu)能力強(qiáng),局部尋優(yōu)能力弱,反之相反。迭代次數(shù),次數(shù)過(guò)少結(jié)束過(guò)早不易得到最優(yōu)解,次數(shù)過(guò)大增大耗時(shí),因此也不宜過(guò)大。本文繼續(xù)選用15個(gè)駐放點(diǎn)來(lái)對(duì)初始溫度、終止溫度及降溫系數(shù)進(jìn)行研究對(duì)比分析,結(jié)果見(jiàn)表3。

表3 初始溫度、終止溫度及降溫系數(shù)對(duì)結(jié)果的影響
通過(guò)表3數(shù)據(jù)可以看出,對(duì)于個(gè)體學(xué)習(xí)因子和社會(huì)學(xué)習(xí)因子,更多的是需要考慮自主的經(jīng)驗(yàn),其次較少考慮群體經(jīng)驗(yàn)來(lái)進(jìn)行計(jì)算;為了保障粒子在搜索的過(guò)程具有一定的效果且在一定的迭代效果下能有好的解,其粒子數(shù)量設(shè)置為500,迭代次數(shù)1 000較為合適;最后關(guān)于慣性因子的設(shè)置,通過(guò)表3可以看出,針對(duì)這一問(wèn)題尋優(yōu)能力的受參數(shù)的影響不大,因此依舊選擇0.2作為模型初值。最終得到當(dāng)個(gè)人學(xué)習(xí)因子1,社會(huì)學(xué)習(xí)因子0.1,粒子數(shù)量500,慣性因子0.2,迭代次數(shù)1 000時(shí),最短路徑距離6.01 km。
通過(guò)選取15個(gè)駐放點(diǎn)的數(shù)值模擬可以在適當(dāng)?shù)膮?shù)設(shè)置下,模擬效果良好,現(xiàn)使用這套參數(shù)進(jìn)行實(shí)際計(jì)算,選用30個(gè)駐放點(diǎn)進(jìn)行模擬調(diào)度,模擬結(jié)果如圖3和圖4所示,得到總路程為13.30 km,總耗時(shí)1.83 h。
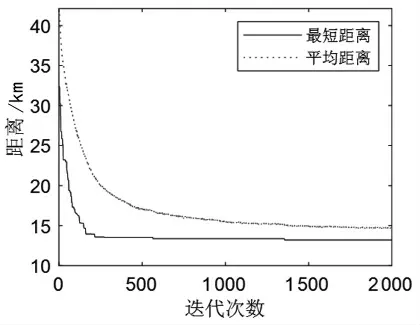
圖3 30個(gè)駐放點(diǎn)各代最短距離與平均距離對(duì)比
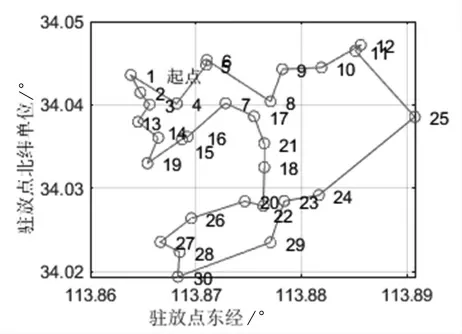
圖4 30個(gè)駐放點(diǎn)粒子群算法優(yōu)化路徑
由于每天需要調(diào)度的駐放點(diǎn)的位置和數(shù)量不同,運(yùn)輸車的運(yùn)輸路線、路程以及所花的時(shí)間都有所不同,但完成調(diào)度時(shí)長(zhǎng)一般不會(huì)超過(guò)2 h,否則,市民在無(wú)車可用或者無(wú)車位可放車時(shí),都會(huì)降低對(duì)于公共自行車系統(tǒng)的滿意度,因此在任務(wù)分配時(shí),可以根據(jù)不同的站點(diǎn)位置及數(shù)量選擇路線來(lái)完成任務(wù)。
5 結(jié)論
本文主要研究公共自行車調(diào)度車的路線運(yùn)輸以及工作效率的優(yōu)化。主要選用旅行商問(wèn)題中的路線規(guī)劃模型以及依據(jù)車輛的平均速度、裝卸速度等參數(shù),利用粒子群算法對(duì)該模型進(jìn)行求解,并進(jìn)行了算法參數(shù)的靈敏度分析。
相比其他智能算法,粒子群算法的參數(shù)設(shè)置易于理解,且利用參數(shù)將粒子速度和位置的合理把握,可以很好地解決這一路徑問(wèn)題。但粒子群法一般要保證研究對(duì)象在30個(gè)以內(nèi)才有較好的解,否則效果較差,而實(shí)際問(wèn)題研究對(duì)象有時(shí)會(huì)超過(guò)這一標(biāo)準(zhǔn),這時(shí)可以考慮將全部站點(diǎn)劃分為多個(gè)工作區(qū)分別進(jìn)行調(diào)度。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19