基于多信號源融合的室內定位技術方案探討
2022-04-29 11:27:03閆東
計算機應用文摘 2022年3期
閆東

關鍵詞:室內定位位置指紋行人航跡推算
1前言
室內定位技術就是在室內獲取位置的相關技術。隨著科技的進步和機器人自動化的發展,在室內對導航的要求越來越多,其中包括室內自動配送、室內緊急救援與疏導、患者就醫場景、考勤打卡定位等場景。全球衛星定位系統能給用戶提供精確的室外定位,但由于受到室內環境的影響和建筑物的遮擋,全球衛星定位系統無法在室內給用戶提供精確的地理位置。此外,由于特定場合的室內定位需求增多,室內定位技術已經成為科研人員研究的重點。
2室內定位技術的發展現狀
常見的室內定位技術包括基于射頻信號的定位技術、基于傳感器的定位技術和基于多信號源融合的定位技術。
基于射頻信號的定位技術:包括基于Wi?Fi、藍牙和無線通信信號、基于超寬帶(UWB)的定位技術等。上述技術一般靠射頻信號來感應周邊環境的信號強度值(RSSI),通過對監測數據進行計算、處理,以此確定位置的技術。基于射頻信號的室內定位方式的主要缺陷是信號容易受多種定位環境以及人體等干擾,從而導致指紋匹配出錯或者產生較大測距誤差。
基于傳感器的定位技術:包括基于傳感器實現行人航跡推算、磁場定位技術、視覺定位技術等。上述定位技術是一種依賴于傳感器(包括傾斜傳感器、加速度傳感器、陀螺儀、磁力計、氣壓計),甚至攝像頭等進行相關信息的采集,隨后進行信息處理、計算得到定位信息的技術。基于內置傳感器的航跡推算技術雖不依賴基礎設施,但隨著時間的推移存在誤差積累。
基于多信號源的融合的定位技術:隨著計算芯片的計算和存儲能力的提高,并且由于單獨使用某種技術,存在定位精度低、效果不佳等情形,以此產生了多信號源融合的技術。多信號源融合技術的數據采集包括基站信號、Wi?Fi、藍牙、加速度、陀螺儀、地磁、視覺、室內地圖、氣壓計等多種信息的采集。該項技術可以提升精度,但同時也有可能會導致定位失準。在獲得傳感器采集的數據后,要對多種信息來源進行預處理,以剔除原噪聲和無效信息。根據不同場景、不同設備條件和需求,從而提取特征進行融合,并賦予不同權重,進而結合地圖和各種狀態的濾波算法,進行最終的融合。
本文所介紹的方案是一種基于多信號源融合的定位技術[1]。本方案根據各種定位方案的技術難度、定位精度、成本等特點,采用基于Wi?Fi信號定位技術和行人航跡推算技術[2]相結合的方式,并結合KNN算法、擴展卡爾曼濾波(EKF)[3]算法來達到精準定位目的。該方案具有定位精度高、成本低、易于實現的特點。
3基于Wi?Fi信號的定位技術方案
利用Wi?Fi信號實現室內導航有兩種方法———測距交匯法和位置指紋匹配法。
測距交匯法就是利用信號的強度衰減模型,通過測量接收端到多個Wi?Fi接入點的信號強度值(即RSSI值),根據距離與RSSI值的信道衰減模型得到接收端到各Wi?Fi接入點的距離,再通過三角定位方法得到位置估值。
位置指紋匹配法是將無法直接測量的位置信息和容易獲取的信號特征建立起映射關系的方法。它以網絡技術與無線通信為基礎,具有成本低、對接入點時間同步精度要求低、易于實現等特點。它可基于Wi?Fi、藍牙等不同無線局域網設備來實現,在眾多室內定位場景下可被使用。位置指紋匹配方法的原理(圖1)是對所在的環境特征進行抽象描述,并進行形式化描述,使用定位環境中多個AP的接收信號強度指示(RSSI)序列描述定位環境中該位置的信息,并采集數據,實現由這些RSSI序列建立起來的位置指紋數據庫(database)[4]。用戶在實際定位的過程中,需要將自身實時測量的RSSI序列特征與位置指紋數據庫中的位置指紋信息特征進行比對和匹配,通過算法取出匹配相似度最高的結果作為自身位置的估計。
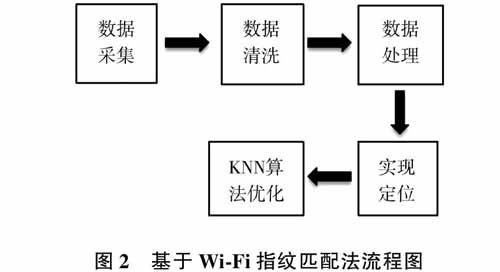
位置指紋匹配法實現的過程如圖2。位置指紋匹配法定位方式包括兩步:訓練過程和定位過程。
(1)訓練過程。首先對室內場所進行區域劃分,然后記錄大量的確定位置點的信號強度(RSSI)。我們將一個18m×10m的實驗場地進行柵格化劃分,布置8個AP,209個訓練測試點。然后利用WirelessMonprofessional軟件對不同的區域進行了大量數據的Wi?Fi信號RSSI的采集,從而得到了大量的數據。最后對采集的信號數據進行清洗處理,并進行求均值處理、排序,從而形成Wi?Fi位置指紋庫。
(2)定位過程。當測試點進入該區域時,可測得測試點在此位置各AP的RSSI值,并將該點RSSI點的數據與指紋庫數據進行相似度對比,再將它們之間的信號空間的歐式距離作為度量度。歐式距離越小的點,表示信號空間距離越接近,相似度越高。
通過KNN算法實現定位點的判斷。KNN算法的原理就是相同類別的樣本之間在特征空間中應當聚集在一起。在KNN算法中,K值的選擇關系到數據可靠性———K值過小,整體模型變得復雜,估計誤差會增大;如果選擇較大的K值,優點是可以減少學習的估計誤差,但缺點是學習的近似誤差會增大,因此選擇選用合適的K值十分必要。該算法具有簡單易用、模型訓練時間快和預測效果好等優點。
4行人航跡推算技術
行人航跡推算具有精度高的優勢。行人航跡推算是利用航跡位置的推算得到定位位置信息。行人航跡推算的原理是利用陀螺儀、磁力計和加速度計等傳感器測得加速度、角速度等數據,然后經過分析處理后可獲得行人在運動過程中的步數、步長以及航向角信息,最后根據前一步的位置信息推算出當前位置信息、通過每一步的運動信息推算出當前用戶追蹤位置。行人航跡推算公式如下:
行人航跡推算需要分三個步驟:航向確定,其原理是通過檢測地球磁場的場強,經過運算得出磁場的方位角;需要進行步數檢測,可以通過判斷加速度的數據來實現步數檢測;步長估計需要完成建模,此時可以通過線性模型或非線性模型完成。
單純靠傳感器進行的行人航跡推算在定位過程中會存在很大的漂移誤差,導航定位也會產生累計誤差。此時需要與無線Wi?Fi定位相結合,進行誤差補償。采用這種技術可有效控制長時間產生的積累誤差,從而提高系統精度。
5融合算法的實現
為提高行人航跡方案的預測的準確度,方案引入了擴展卡爾曼濾波。擴展卡爾曼濾波是一種擴展的卡爾曼濾波算法,其基本思想是將非線性系統線性化,然后進行卡爾曼濾波。卡爾曼濾波可以用于優化估算一些無法直接測量但是可以間接測量的參數,用于對受誤差影響的傳感器測量值估算出系統狀態。行人航跡方案是非線性系統,需要采用擴展卡爾曼濾波來估算出系統的狀態。同時,在EKF融合階段與無線Wi?Fi位置指紋匹配法獲得的數據相結合,并進行矯正后,可以實現最終的結果輸出。
6實驗結果分析
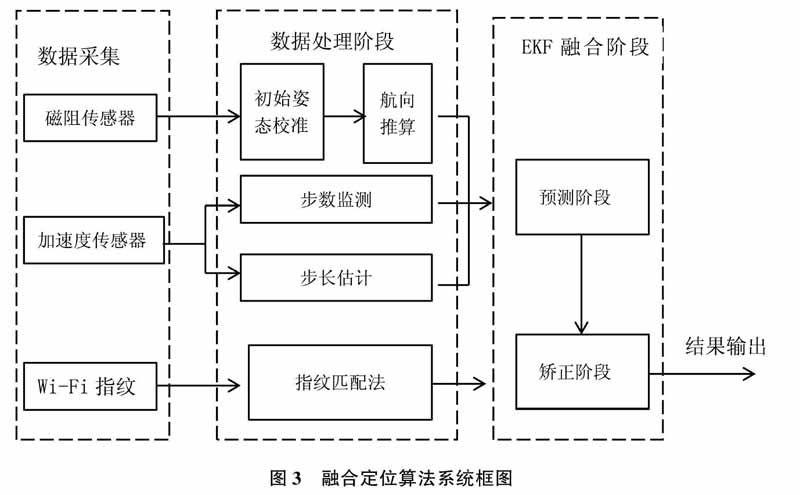
通過采用KNN算法的Wi?Fi位置指紋定位與采用EKF的行人航跡結合的系統,定位精度提高明顯。Wi?Fi位置指紋技術的平均定位精度可達4.05m,結合KNN算法的Wi?Fi位置指紋定位技術平均定位精度可達3.50m。Wi?Fi位置指紋定位技術結合行人航跡推算技術,并通過擴展卡爾曼濾波融合算法方案,可以使定位精度達2.51m,如圖3所示。
7結束語
本方案是一種Wi?Fi位置指紋定位技術和行人航跡推算技術融合的室內定位方案,同時引入了KNN算法和擴展卡爾曼濾波算法。通過結果可知,本方案可有效提高室內定位精度。鑒于定位精度的提高,室內定位技術具有廣闊的應用場景。事實上,方案引入的KNN算法和擴展卡爾曼濾波算法仍有優化空間,定位精度有進一步提高的可能。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(2016年9期)2016-02-27 09:05:39
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
