艦載無人直升機自主著艦方法研究
2022-04-29 15:25:03于淼
計算機應用文摘 2022年14期

摘要:針對我國無人直升機艦上使用不易實現的問題,在研究無人直升機自主著艦引導方法的基礎上,對著艦過程中直升機與艦船的位置和狀態建立模型,提出一種基于艦船運動預測與補償、飛機與艦船運動姿態匹配的自主著艦引導/控制策略,給出了無人直升機自主著艦引導系統方法,為實現無人直升機自主著艦提供了較為有效的解決方法和技術手段。
關鍵詞:無人直升機;自主著艦引導;著艦控制;運動預測與補償;自抗擾控制
中圖法分類號:V279文獻標識碼:A
Research on autonomous landing method of shipborne unmanned helicopter
YU Miao
(The 27th Research Institute of China Electronics Technology Group Corporation,Zhengzhou 450047,China) Abstract:In purpose of solving problem of the difficult implementation of unmanned helicopter for shipboard use, this paper firstly studies autonomous landing schemes for ship-borne unmanned helicopter, then an autonomous tracking scheme based on ship motion measurement and compensation,aircraft and normal motion is proposed. The method of autonomous landing and receiving system of unmanned helicopter is given, which provides a strategic solution and technical means for autonomous launching of unmanned helicopter.
Key words: unmanned helicopter, autonomous carrier landing, landing control, motion prediction and compensation, active disturbance rejection control
1引言
為了順應現代海戰的立體化作戰趨勢,維護海洋權益,保障領海安全,世界各國都在大力研發艦載無人機,以保證在海上制空權爭奪中占得先機。艦載無人直升機能夠靈活起降于艦船上,執行護航、反潛、反艦等作戰任務,艦船伴隨性好,能夠有效補充海基航空力量,提升艦艇編隊的作戰能力,在未來信息化海戰中占據著舉足輕重的地位[1]。
相比于傳統的地面起降,艦載無人直升機在中小型艦船上起降更加困難且危險[2]。這是因為在艦船上起降易受復雜的海面氣象狀況、艦船的六自由度擾動、異常復雜的大氣紊流以及極其有限的甲板長度等因素的影響,這將直接威脅艦載無人直升機的著艦安全[3]。因此,研究無人直升機自主著艦技術,對艦載無人機的安全回收具有重要意義。
世界各國均在不斷加大對自主著艦系統的研究投入。歐洲國家因為海軍使用的軍艦相對較小,則更偏向于使用中小型海上無人直升機系統。歐洲制造商正在加緊為這些系統研制適合的遠海高海環境下使用的“自主?垂直起降”(Auto?VTOL)系統。
“甲板搜索者”系統是法國EADS?Astrium公司研制的一種自主垂直起降系統,該系統采用基于空間的 GPS 技術,通過6顆衛星與相應的機載接收機使無人直升機在固定和移動平臺上完成全自主起飛和著艦,雖然不能預測船舶運動,但可幫助垂直起降的無人機找到最佳降落點。該系統包括艦船段和機載段,艦船段可以臨時快速部署,或永久安裝在艦船的直升機起降甲板周圍;機載段則由兩個向下導向的天線、一個輕量級的接收器和一個機載計算機組成,可以配置在任何重量小于1.2kg 的 VTOL?UAS 上。2011年,德國用1架安裝了“甲板搜索者”系統的瑞士 NEO S?300 VTOL?UAS 在極冷的條件下于德國聯邦警方船“布雷德斯泰特”上進行了測試。
在研究目前著艦系統基礎上,本文提出了一種基于艦船運動預測與補償、飛機與艦船運動姿態匹配的自主著艦引導/控制策略,給出了無人直升機自主著艦引導系統方法,為實現無人直升機自主著艦提供了較為有效的解決方法和技術手段。
2系統組成與原理
自主著艦系統主要由機載著艦控制分系統、艦載著艦引導分系統組成[4~7]。
如圖1所示,當無人直升機飛至母艦附近降落時:(1)艦載衛星導航接收機與艦體運動傳感器將當前艦船的位置、速度、姿態以及海上環境信息發送至著艦引導單元,著艦引導單元將艦船信息整合并通過測控單元上傳至直升機;(2)著艦控制單元根據接收到的艦船信息,結合衛星導航接收機、垂直陀螺等機載設備獲取的直升機位置、速度、姿態信息,計算出直升機與艦船的相對位置、姿態與速度;(3)機載艦船運動補償與預測軟件將根據艦船的運動規律預估艦船運動趨勢,并聯合艦控制單元隨時調整飛行操作指令;(4)著艦控制單元將飛行操作指令發送至飛控單元,調整直升機至跟蹤狀態,最終使無人機跟隨艦船做平移運動;(5)當無人機與艦船的相對位置、姿態與速度保持穩定后,控制下降的速度降低飛行高度,接近著艦區域;(6)通過考慮艦船的搖擺運動和沉浮運動,將直升機與艦船的相對速度控制在合適的速度之下,并確保在甲板處于水平或下沉狀態時觸艦。
至此,艦載無人直升機實現自主著艦。
3關鍵技術
3.1艦船運動預測及補償技術
艦載機需要在艦艇的飛行甲板上進行著艦,但艦體因為受到風浪的影響,會產生橫搖、縱搖、升沉等運動,導致著艦區域產生六自由度的空間位置變化,嚴重影響著艦安全。艦船運動補償及預測技術能夠降低艦船與直升機相對運動對著艦的不利影響。
分別建立艦船與艦載直升機的運動方程,直升機在接觸搖擺甲板的瞬間,對其運動狀態起決定性作用的是重心的位置、速度及相對于重心的角位移,即:
直升機相對于艦艇甲板中心的坐標為:
假定艦船為規則搖擺,其橫搖、橫向水平位移、升沉運動可描述為:
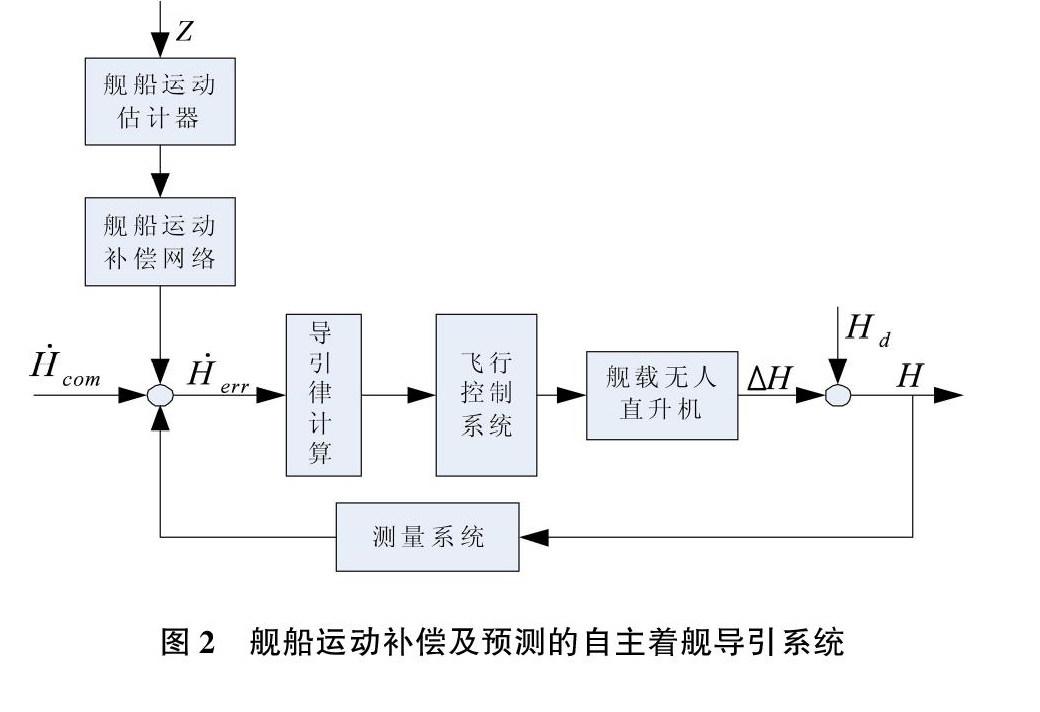
采用功率譜密度法,得到艦體運動模型。在著艦前,自主著艦控制系統引入艦船運動因素,確保無人機可以隨動艦船。為了顧及艦船的位置信息,采用卡爾曼最優濾波原理設計艦船運動預估器。同樣地,為了保障飛機在著艦的最后時段跟蹤著艦點運動,設計運動補償網絡[8~9]。兼具艦船運動補償及自主著艦導引系統[10]如圖2所示。
3.2自抗擾控制技術
由于艦載無人直升機在著艦過程中,機上沒有飛行員參與直升機的應急控制,而且直升機不但受到直升機本體不穩定結構擾動,還會受到海況特點和艦尾氣流擾動的影響,因此采用具有自抗擾功能的導引控制系統。
本文采用二階自抗擾控制器設計縱向自主著艦導引系統。它采用非線性結構,利用誤差大小和方向來實施非線性反饋控制,破除了傳統極點配置弊端[11]。
首先,二階跟蹤微分器的方程為:
其次,擴張的狀態觀測器的方程為:
式(5)中,z21和 z22分別對應系統輸出 y 及其一階導數 y·的估計;z23為擴張的狀態變量表示系統運行中擾動的實時估計。
最后,形成誤差反饋控制律:
由以上三部分即可組成二階自抗擾控制器(ADRC)。基于 ADRC 的縱向自主著艦導引系統[12]如圖3所示。
3.3著艦控制策略與控制算法
自主著艦控制系統控制原理:首先,機載傳感器將實時測得直升機飛行高度信息傳遞給艦載計算機,艦載計算機將其與內部存儲的理想高度進行計算得出高度偏差量,之后將此偏差量傳遞給設計好的導引規律,并形成導引指令,此導引指令的目標是讓此偏差量朝著變小的方向發展,之后通過無線電數據鏈將導引指令發送到無人艦載直升機飛控系統。飛控系統控制直升機沿著期望的著艦路徑安全著艦。同時,要求在著艦過程中,艦載直升機要與艦船隨動。基于此原理,在控制策略上,對無人直升機所處的狀態進行細化,將艦面運動干擾和陣風減緩進行區分。通過這樣的措施,建立起一個良好的控制對象,將系統誤差降低到較小的范圍,為控制器提供一個最優的設計空間。
4結束語
本文結合艦載無人直升機自主著艦的機艦運動特性與環境影響因素,提出了一種基于艦船運動預測與補償、飛機與艦船運動姿態匹配的自主著艦引導/控制策略,給出了無人直升機自主著艦引導系統方法,為實現無人直升機自主著艦提供了較為有效的解決方法和技術手段。
參考文獻:
[1]高嘉景.海軍艦載無人機的現狀及其發展趨勢[J].艦船電子工程,2004(3):16?19+25.
[2]唐大全,畢波,王旭尚,等.自主著陸/著艦技術綜述[ J].中國慣性技術學報,2010,18(5):550?555.
[3]崔麥會,周建軍,陳超.無人機艦載應用的關鍵技術探討[J].航空科學技術,2004(5):31?33.
[4]謝建東.無人直升機 GPS/INS 組合導航系統的設計與仿真[D].南京:南京航天大學,2005.
[5]杜平,張佳麗.一種艦載直升機著艦模型的建立與分析[J].艦船科學技術,2012,34(6):102?106.
[6]王文濤,張志春.直升機著艦動力學特性仿真[ J].四川兵工學報,2009,30(11):68?70.
[7]烏蘭巴根,胡繼忠,徐元銘.無人直升機自主著艦系統設計及仿真試驗[ J].北京航空航天大學學報,2010,36(8):986?990.
[8]余勇,楊一棟.基于卡爾曼濾波理論的甲板運動預估技術研究[J].數據采集與處理,2002(4):381?384.
[9]彭秀艷,王志文,吳鑫.艦載機縱向自動著艦控制[J].智能系統學報,2011,6(2):172?177.
[10]張永花,周鑫.縱向甲板運動補償技術研究[J].電光與控制,2012,19(4):18?22.
[11]李冀鑫,侯志強,鄭小洪.艦載飛機縱向著艦自抗擾導引系統設計[J].飛行力學,2008(2):13?15+24.
[12]李冀鑫,侯志強,鄭小洪,等.縱向著艦二階自抗擾導引控制律設計[J].海軍航空工程學院學報,2008(2):139?142.
作者簡介:
于淼(1967—),本科,高級工程師,研究方向:新概念武器。
