基于深度卷積神經網絡的足球射門最優路徑規劃系統
2022-05-02 07:11:54張倩,彭建
蘭州文理學院學報(自然科學版) 2022年2期
張 倩,彭 建
(合肥科技職業學院 體育系,安徽 合肥 230000)
足球運動是目前世界上最流行的運動項目之一,受到越來越多人的喜愛,各個國家對足球運動的重視程度也逐漸提高[1-2].在足球比賽中,贏得勝利的關鍵是足球射門.射門的過程具有較強的靈活性和技巧性,因此,合理規劃足球射門的最優路徑成為現階段研究的熱點話題.相關專家給出了一些較好的研究成果,李根等[3]通過對研究區域的地形進行建模,結合柵格法,通過蟻群算法進行全局最優路徑搜索,同時對螞蟻數量等相關參數進行對比分析,獲取最優參數組合.馮煒等[4]組建海流模型以及阻礙物模型,結合量子行為粒子群優化算法進行求解,獲取最優路徑.上述兩種系統雖然取得了較為滿意的研究結果,但是隨著足球技術的迅猛發展,該技術的搜索效率和時長已經無法滿足當前需求.因此,本文設計了一種基于深度卷積神經網絡的足球射門最優路徑規劃系統.
1 基于深度卷積神經網絡的足球射門最優路徑規劃系統
足球射門最優路徑規劃系統需要充分掌握場地的基本信息,形成電子地圖,方便使用.通過系統在完全陌生的環境下進行路徑規劃,找到最優的足球射門路徑.同時,通過系統的電子地圖,用戶可以實時查詢球場的情況,球員可以結合足球場的實際情況調節自己的射門路線,隨時搜索最佳路線,提高足球射門成功的概率.
結合深度神經網絡,給出足球射門最優路徑規劃系統,具體如圖1所示.
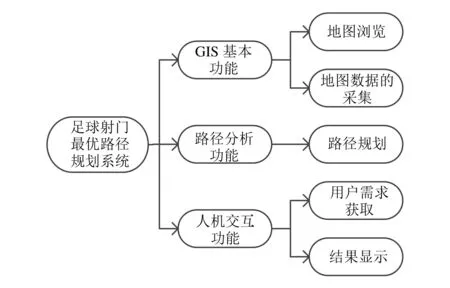
圖1 足球射門最優路徑規劃系統功能示意圖
(1)地圖瀏覽模塊:地圖瀏覽功能通過eSuperMap控件的縮放功能實現.同時,縮放功能也是重點針對地圖大小進行縮放,加快系統的引導速度.
(2)路徑規劃分析模塊:路徑規劃分析模塊是整個系統的核心模塊,主要功能是用戶優先選取最佳路徑,例如最短的路徑或者最短時長的路徑等;在地圖上標記多個起始點和目標點[5-6],結合實時計算方法獲取最短時間內的最佳射門路徑.
影響優化路徑的因素有距離及時間等因素,綜合考慮影響因素,采用統一的參數進行說明.圖1為足球射門最優路徑規劃系統功能示意圖.
(3)屬性查詢模塊:對于足球射門的最優路徑規劃系統而言,查詢功能是整個系統不可或缺的一部分,為用戶在使用該系統時提供更優質和便捷的服務,因此,在系統中加入屬性查詢功能.由于已有的嵌入設備并不支持鍵盤輸入,所以通過點選的方式明確查詢對象[7].當用戶選取任意一點或者任意一條路徑時,系統給出研究對象對應的屬性數據.
(4)人機接口模塊:人機接口模塊是提供用戶和計算機進行交互的模塊.構建一個人機交互的界面,通過一定的流程進行問題分析,其中主要包含功能支持以及界面類型規范等.針對本文設計的系統而言,需要利用人機接口得到路徑的起始點以及目的地點等數據,同時獲取用戶的需求.
(5)系統用例圖模塊:用例是描述系統外在的需求情況,用于系統的階段性需求的分析.模塊所描述的內容即用戶所理解的功能,主要代表內部用戶和交互系統兩者間的全部操作,該模塊需要對系統的外部屬性進行建模,全面展示各個系統間的交互[8].系統的總體功能用圖2描述.
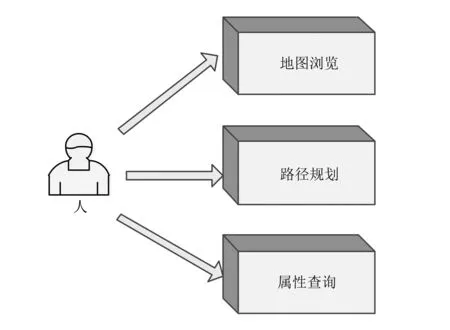
圖2 足球射門最優路徑規劃系統用例圖
因為用戶工作環境的需求,需要系統具備良好的人機交互系統[9-10],同時,系統以占用存儲空間小,并且實時性好等為目標進行設計,系統需要滿足以下條件:①滿足目的地的多點需求,同時具有一定的時效性;②能夠根據用戶的需求提供最短以及耗時最低的路徑;③考慮路況變化情況以及足球場的射門規則;④最終的結果呈現給用戶.
足球射門的最優路徑規劃系統的結構組成如圖3所示.由圖3可知,整個系統主要由以下幾個部分組成.①人機交互界面:主要負責獲取數據,并且顯示最終的規劃結果;②數據地圖數據庫:主要負責獲取足球場的實時數據;③路況數據庫:主要負責獲取足球場對應的路況信息.
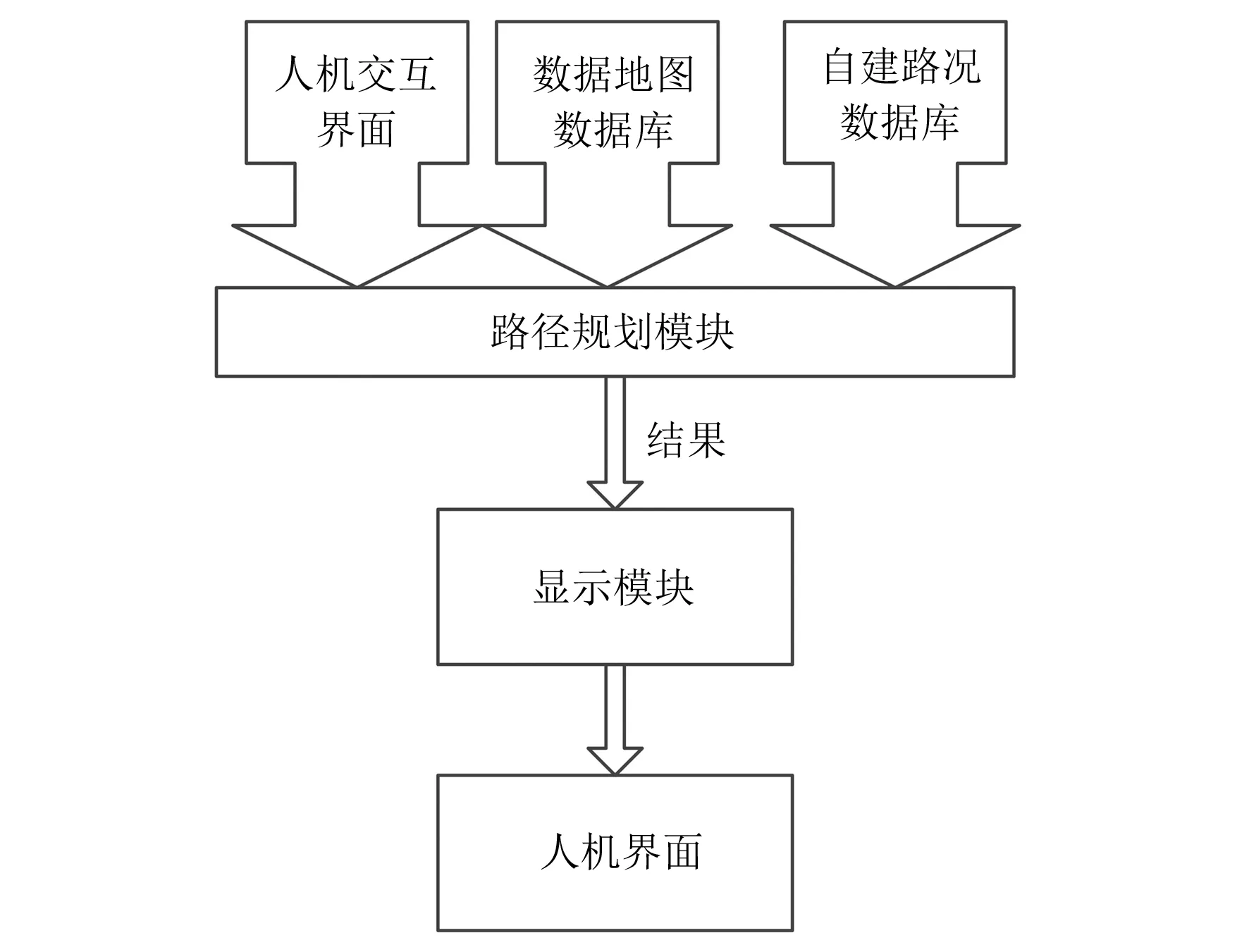
圖3 路徑規劃系統構成簡圖
從技術方面出發,將路徑規劃系統嵌入電子地圖,將其設定為基礎數據庫,通過用戶需求規劃出一條最佳足球射門路徑.
地理信息系統是集收集、管理以及操作等為一體的計算機硬件系統[11].地圖瀏覽模塊主要實現以下幾方面的功能:①放大:地圖的放大功能通過選熱區實現;②縮小:地圖的縮小功能通過選熱區實現;③平移:用戶點擊移動操作時,地圖可以通過指定的方向以及平移量進行平移;④中心顯示:用戶點擊操作按鈕時,整體將以地圖為中心進行移動,并且研究區域最大化顯示,對重要的影響因素進行實時調整.路徑規劃的模塊是在特定的時間內進行足球射門的最優路徑規劃,使用的技術是獲取最小旅行代價路線.
人機接口模塊的基本設計原理為:①界面設計全部保持一致;②系統控制和顯示功能具有人們期望的功能等.人機接口模塊硬件構成主要由顯示器以及觸摸屏等子模塊組成.用戶在系統上輸入足球射門的起始點和終點,系統開始規劃路徑,最終通過人機顯示模塊完成路徑顯示.
2 足球射門最優路徑規劃方法
路徑規劃是在行駛路徑存在障礙物的情況,制定一條標準且無障礙物的路徑.將粒子群算法應用到足球射門的最優路徑規劃中.環境建模是完成路徑規劃的前提和基礎,關鍵點是障礙物的表示,即機器人的人際環境需要結合一定的策略轉換進行路徑規劃的模擬.路徑規劃是針對有限個障礙物并且存在路障的規劃環境,尋找起點到終點全部路徑的集合[12-13].
設定足球分布在大小不一的有障礙物的二維有限區域內運動,足球場是尺寸為r的正方形區域,將空間劃分為r×r的柵格,其中各行的柵格數量為:
Nx=xmax/R.
(1)
采用圖4表示柵格中的數據,優先對研究區域的環境進行建模分析,借助粒子群算法在模型搜索最優解.其中,通過粒子群的優化,獲取一條無障礙的射門路徑.

圖4 柵格坐標和序號間的關系
對于足球場的二維地圖而言,進行足球射門最優路徑規劃的主要目的就是獲取耗時和距離最短的可行路徑.設定粒子第i和第i+1兩個相鄰元素的適應度值為fit(i,i+1),則整個路徑的可選擇適應度函數為
(2)
(3)
粒子群中的全部路徑都是由相鄰兩個元素構成,各個元素間的路徑必須在環境數組的第i行和第i+1行.通過粒子群算法獲取足球射門最優路徑規劃具體操作流程如下:①將研究區域內的環境參數進行初始化處理[14],確定柵格大小,并且進行環境建模,得到對應的環境數組Circum;②將粒子群算法中的參數進行初始化處理;③將初始化迭代次數進行初始化處理,同時依次檢測粒子是否有效,重新進行初始化處理無效粒子,直至形成有效的粒子為止;④分別計算不同粒子的適應度取值,同時將其存入到fitval中,對比各個粒子當前適應值和歷史最優適應值.如果取值低于pbestfitval,則將當前粒子的位置以及粒子的適應值放入到歷史最優中;⑤獲取歷史最優值pbestfitval的最小值,將其和之前的全局最優值進行對比,如果歷史最優適應值的最小值低于之前的全部最優pbestfitval,則將對應的適應值和粒子位置放置到全局最優中;⑥對粒子的速度和位置進行更新;⑦對更新后的粒子進行有效檢查,將無效的粒子重新進行初始化處理;⑧將當前的迭代次數設定為依據[15],將慣性權重進行線性處理;⑨停止迭代,整個粒子群經過進化后能夠獲取最優路徑Gbest.
3 仿真實驗
為了驗證本文提出的基于深度卷積神經網絡的足球射門最優路徑規劃系統的可行性,需要在表1所設置的參數配置下進行仿真實驗測試.
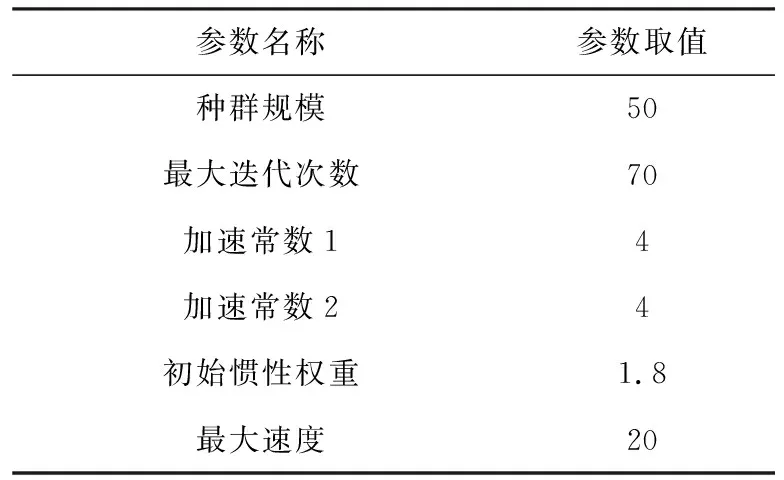
表1 實驗參數設置
將文獻[3]系統以及文獻[4]系統作為對比系統,在相同環境下,重復進行30次測試,分別對比三種系統的性能,以圖5作為測試對象,分別對比三種系統的足球射門最優路徑長度和平均耗時,以此作為衡量指標,具體實驗對比結果如表2,不同系統的最優路徑長度變化曲線如圖6所示.

圖5 測試圖像
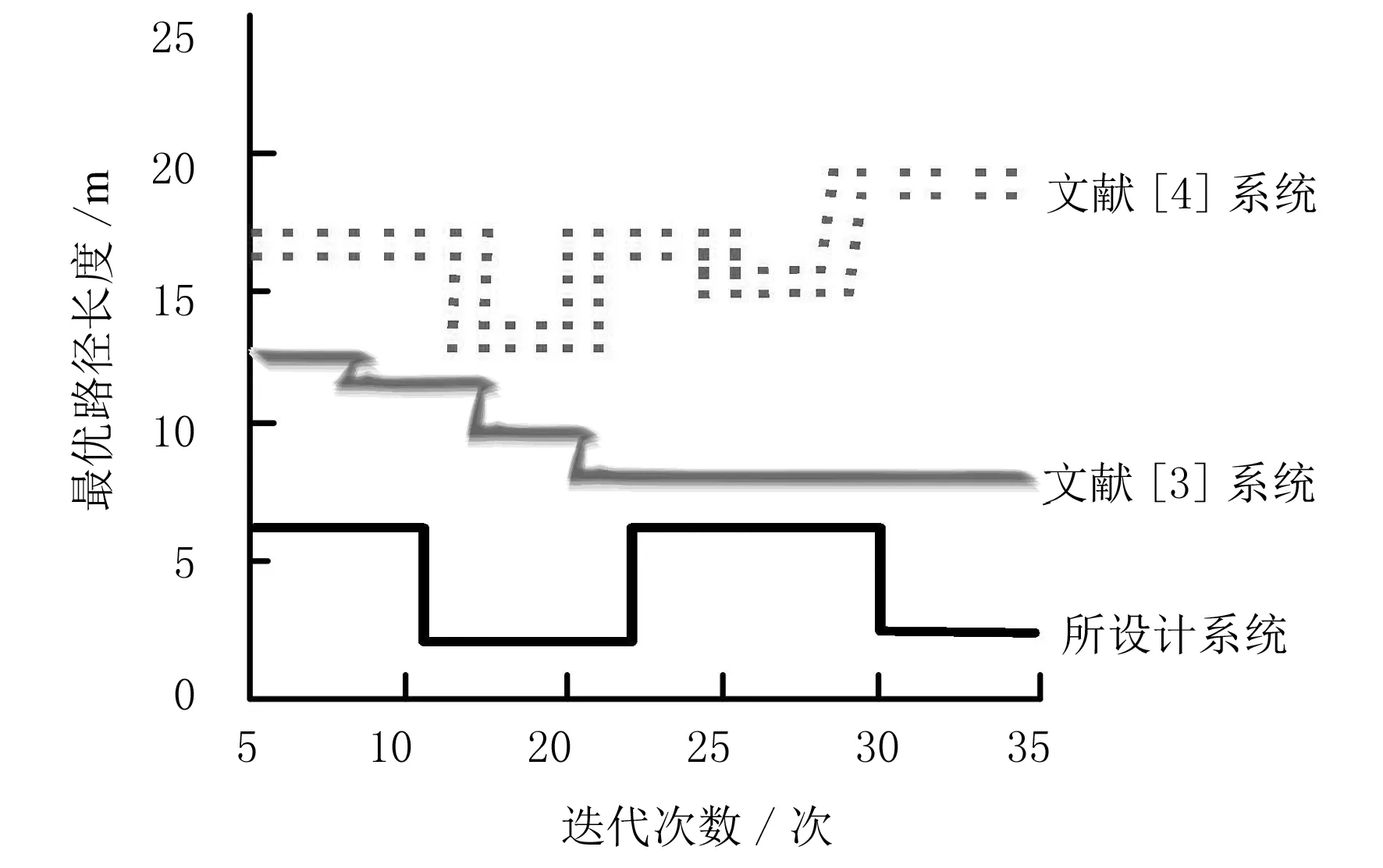
圖6 不同系統的最優路徑長度變化曲線
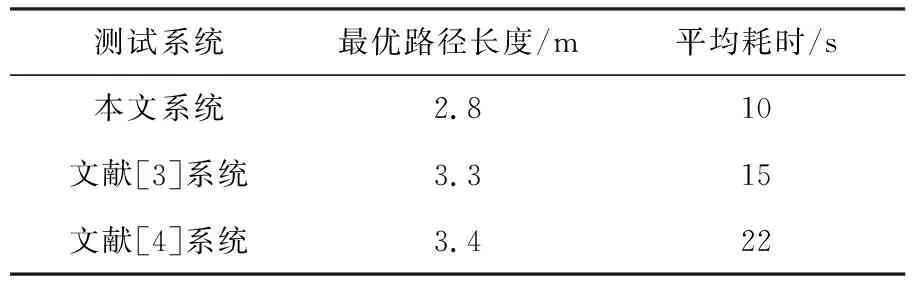
表2 不同系統的足球射門最優路徑長度和平均耗時對比
綜合分析上述實驗數據,能夠得到如下結論:①分析表2和表3中的實驗數據可知,本文設計的系統規劃的最優路徑平均長度為2.8 m,其他兩種系統的平均路徑長度都在3.0 m以上,均高出本文系統,除此之外,在計算最優路徑的耗時上,本文系統耗時只有10 s,而文獻[4]的系統耗時是本文的兩倍以上,文獻[3]的耗時也高出本文系統5 s,其耗時均超過本文方法0.5倍以上,因此本文系統的足球射門最優路徑在三種系統中是效率最高的系統;②分析圖5中的實驗數據可知,所設計系統的最短路徑長度明顯更低一些,主要是唯一通過局部信息素全面拓展了粒子的搜索能力,確保其能夠以最快的速度獲取最優路徑.
4 結語
針對傳統足球射門路徑規劃系統存在的一系列問題,結合深度卷積網絡,設計并提出基于深度卷積神經網絡的足球射門最優路徑規劃系統,構建人機交互系統,完成地圖瀏覽、平移等功能,通過粒子群算法進行環境建模,進而完成路徑規劃的模擬,最終完成最優路徑的選擇.仿真實驗結果表明,本文設計的系統提高了搜索的效率,有效規劃最短的路徑的同時,降低了路徑規劃耗時,可促進足球研究的發展.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國科技論壇(2017年7期)2017-07-25 08:49:53
商用汽車(2016年11期)2016-12-19 01:20:16
中國衛生(2016年2期)2016-11-12 13:22:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
中國工程咨詢(2016年4期)2016-02-14 07:28:28
創業家(2015年5期)2015-02-27 07:53:25