利用K-SVD字典學習算法壓制海洋大地電磁噪聲
2022-05-05 04:58:48封常青李予國吳云具段雙敏
地球物理學報 2022年5期
關鍵詞:信號
封常青, 李予國,2,3*, 吳云具, 段雙敏,2
1 中國海洋大學海洋地球科學學院, 青島 266100 2 中國海洋大學海底科學與探測技術教育部重點實驗室, 青島 266100 3 青島海洋科學與技術試點國家實驗室海洋礦產資源評價與探測技術功能實驗室, 青島 266237
0 引言
大地電磁法(Magnetotelluric, MT)是一種以天然電磁場為場源來研究地球內部電性結構的地球物理方法.海洋大地電磁測深(Marine MT)通過坐底式海底電磁采集站(OBEM)測量感應電磁場.高導電的海水相當于一個低通濾波器,在一定程度上可以減少人類活動所形成的各類人文噪聲,使得海底成為一個低噪聲的電磁環境(Jones, 1999).然而,由于引力、地球自轉、空氣流動等作用,海水處于不停的運動之中,且其運動形式多種多樣(如海浪、潮汐和洋流等).海水的運動會對海洋大地電磁探測尤其是淺水區電磁探測產生嚴重干擾.一方面,位于海底的電磁接收儀器易受到海水沖刷作用而發生振動(Lezaeta et al., 2005).另一方面,根據法拉第電磁感應定律,運動的海水如海浪(Weaver, 1965; Fraser, 1966)和潮汐(Larsen, 1968)等因切割地磁場而產生感應電流,進而產生二次感應磁場.它們都會對所采集電磁數據的質量產生影響,降低海洋MT數據的信噪比.
在淺水環境中,海浪運動產生的感應電磁場是影響海洋電磁數據質量的主要噪聲之一(Lilley et al., 2004).海浪波動所產生的磁感應強度通常為幾納特到十幾納特,電場強度為幾至幾十微伏每米(Chave, 1983).海浪運動對電磁場的影響主要出現在1~30 s的周期范圍內,導致此頻段內MT數據信噪比降低,視電阻率和相位曲線發生嚴重畸變(Duan et al., 2020).根據海浪感應電磁場的特性,可以采用信噪分離算法提取海浪感應電磁場.于彩霞等(2010)和張寶強(2018)分別將經驗模態分解和小波閾值去噪方法應用到淺水區MT數據處理中,視電阻率曲線得到明顯改善,但相位效果不理想.
K-SVD字典學習方法作為一種成熟的稀疏表示算法已經被成功地應用于圖像去噪(Elad and Aharon, 2006)、語音信號增強(Wang et al., 2016)和地震勘探中隨機噪聲壓制(Tang et al., 2012)等領域.字典學習算法在電磁數據去噪中也得到初步應用.湯井田等(2018)基于人文噪聲的特點,利用字典學習算法構建過完備字典,分離音頻大地電磁數據中的人文噪聲.Xue等(2020)將K-SVD字典學習方法應用于時間域航空電磁數據去噪處理中,取得了較好效果.字典學習算法在大地電磁信號(Li et al., 2020, 2021b)和可控源電磁信號(Li et al., 2021a)噪聲壓制中也得到了應用.海浪運動會對淺水區大地電磁磁場數據造成嚴重干擾(Constable et al., 1998).考慮到海浪感應磁場的窄帶譜特性,以及其在時間域表現出較強的規律性(張寶強, 2018).我們使用K-SVD字典學習方法提取海浪感應磁噪聲,并結合視電阻率信息進行相位校正,期望提高海洋大地電磁數據的質量.
在本文中,我們首先闡述K-SVD字典學習方法與相位校正的基本原理,其次提出海浪感應磁噪聲去噪流程.然后分別將該方法應用于仿真數據和南黃海實測大地電磁數據噪聲抑制中,并分析其效果.
1 海浪感應磁噪聲壓制方法
1.1 K-SVD字典學習方法
在信號處理領域,某些信號經過合適的變換后,可以用一個僅含有少量非零元素的矩陣進行表示,即信號在變換域中是稀疏的.在稀疏表示算法中,這種變換域被稱為“字典”,其列向量則被稱為“原子”.從綜合角度來看,信號可以表示為少量字典原子的線性組合,即信號在字典表示下是稀疏的(練秋生等, 2015).
假設一維離散信號為y∈M,并可以表示為
y=Dx+ε,
(1)
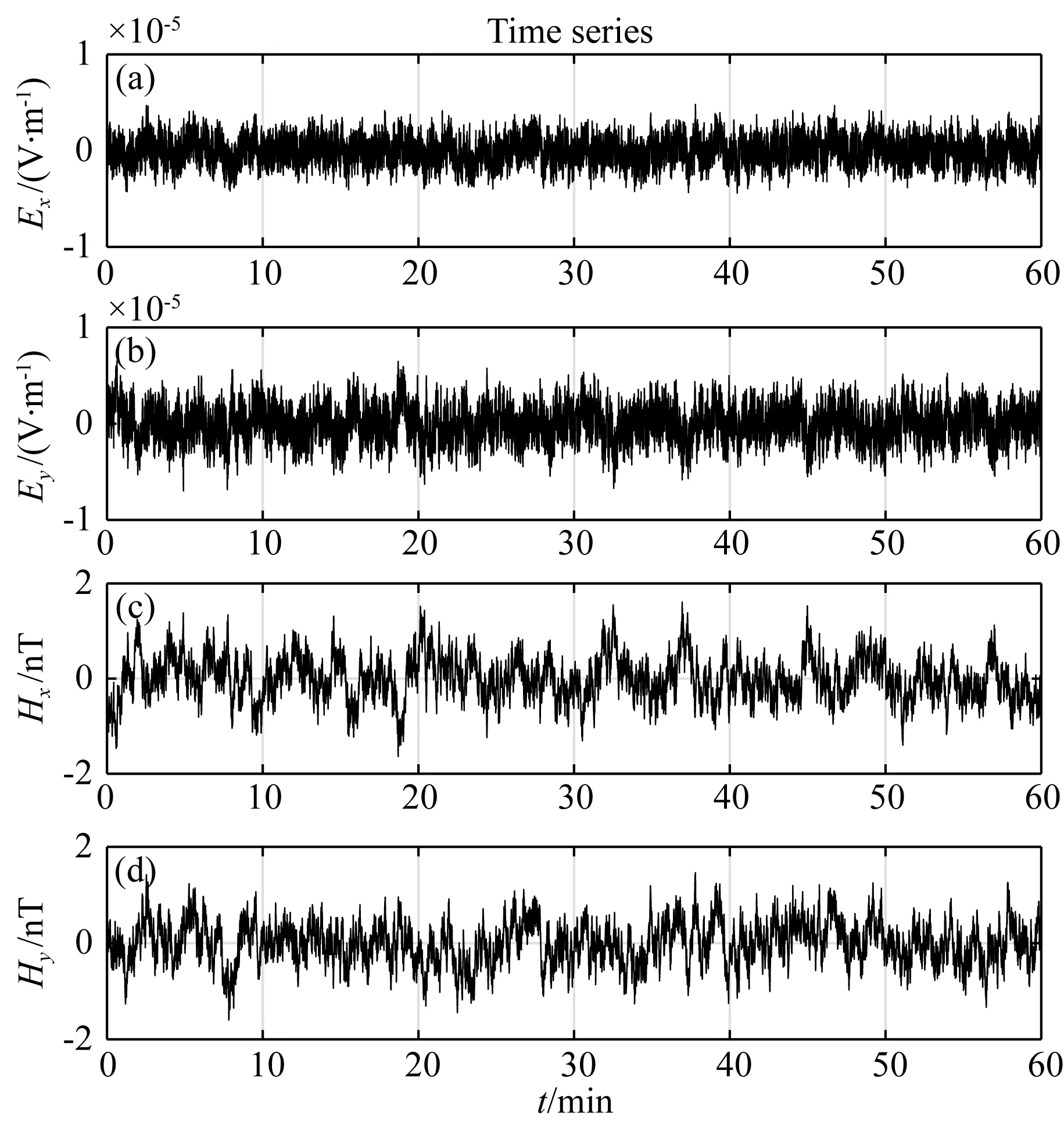
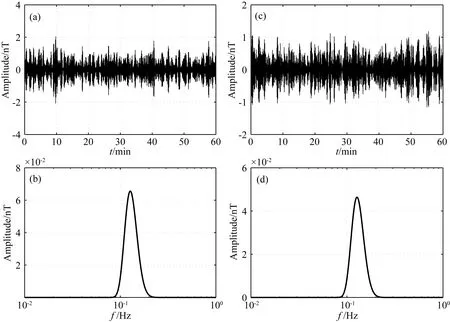
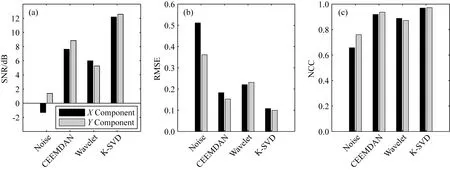
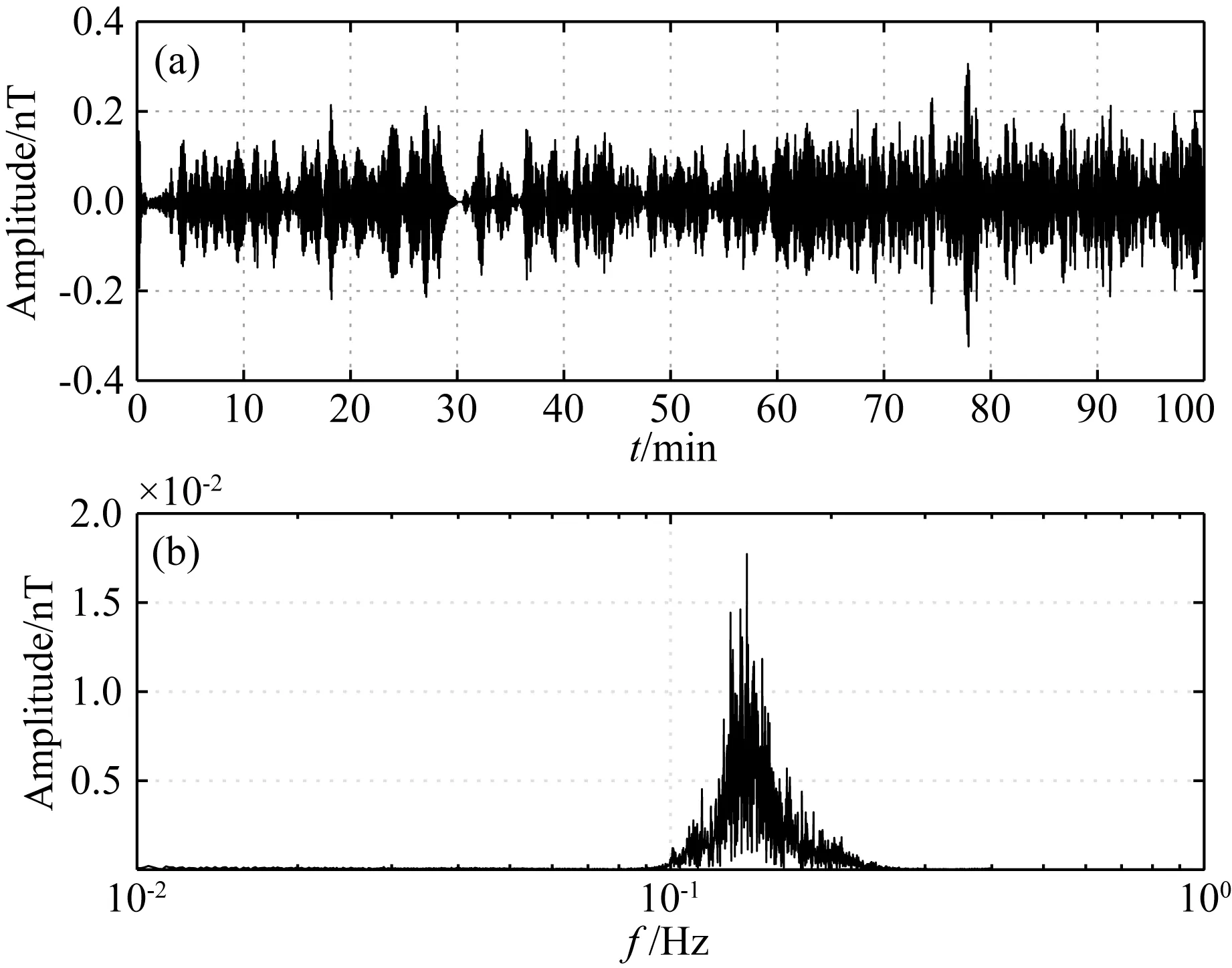
式中,x∈K是稀疏的系數矩陣,D∈M×K稱為字典,這里M和K分別為字典D的行數和列數.字典D通常是過完備字典,即M (2) 式中,‖x‖0是x的l0范數,它表示x中非零元素的數量,ε為殘差閾值. 在字典D給定的情況下,Mallat和Zhang(1993)采用匹配追蹤算法(Matching Pursuit, MP)求解稀疏系數x.Pati等(1993)用正交匹配追蹤算法(Orthogonal Matching Pursuit, OMP)求解過完備字典下的稀疏表示問題.傳統的匹配追蹤算法在求解稀疏系數時,往往通過事先定義某種數學變換或調和分析方法構造過完備字典,例如過完備離散余弦變換(Overcomplete Discrete Cosine Transform, ODCT)字典.雖然該類算法在構造字典時相對簡單,但是受限于原子固定的形狀,它對信號的適應性較差.為了提高字典對信號的適用性,Aharon等(2006)和Rubinstein等(2008)提出了K-SVD字典學習方法.該方法采用數據驅動方式直接從訓練集中獲得與目標信號特征相符合的原子,使得更新后的字典對目標信號具有更好的適應性. 對于訓練信號集Y=[y1,y2,…,yN]∈M×N,假設其每一列信號均可以表示為字典D中少量原子的線性組合,則稀疏表示問題可以寫成為 (3) 利用K-SVD字典學習方法求解(3)式的過程可分為稀疏編碼和字典更新兩個階段,二者交替進行.在稀疏編碼階段,采用正交匹配追蹤算法獲得稀疏系數矩陣X=[x1,x2,…,xN]∈K×N,在字典更新階段則利用奇異值分解(Singular Value Decomposition, SVD)方法依次對字典D逐列進行更新.我們期望在更新第k列原子時,(4)式取最小值(Aharon et al., 2006): (4) (5) 定義Ωk∈N×|ωk|,其中在(ωk(i),i)處元素值為1,其余位置元素值為0.式(4)可以等價為 (6) 下面,舉例說明稀疏表示方法消除信號噪聲的原理及效果.我們模擬一段多頻信號: T=sin(2π×100t+0.1)+3cos(2π×130t+0.9) +0.7sin(2π×170t+1.5). (7) 圖1 不同噪聲增益系數S的重構信號信噪比 當噪聲增益系數S=1.02時,去噪后的 重構信號信噪比達到極值13.14 dB.Fig.1 SNR of reconstructed signals with different noise gain coefficient S When S=1.02, the SNR of the reconstructed signal reaches the extreme value of 13.14 dB. 對模擬得到的信號加入高斯白噪聲后得到信噪比為0 dB的加噪信號.分別對無噪信號、高斯白噪聲和加噪信號以不同的噪聲增益系數S進行OMP稀疏表示,重構信號的信噪比隨噪聲增益系數的變化曲線如圖1所示.由圖1可以看出,在重構信號信噪比相同的情況下,無噪信號所使用的噪聲增益系數比高斯白噪聲的更大,這說明在相同字典的情況下,噪聲信號更難以表達.這就是稀疏表示算法可以用于信號去噪的本質.而由加噪信號的重構結果可以看出,過小或過大的噪聲增益系數均不能實現最佳去噪效果,存在最優的噪聲增益系數使得重構信號的信噪比取得極值.在實際去噪實驗中,最優的噪聲增益系數具有未知性.在去噪過程中,通常通過試驗不同的增益系數,并結合去噪后信號的時頻信息(如振幅譜、時頻圖等)確定最優噪聲增益系數. 在利用K-SVD字典學習方法實現信噪分離后,對去噪后的信號進行Robust阻抗估計往往可以得到較為光滑的視電阻率曲線,但是所得到的相位曲線仍然顯得不夠理想.Weidelt(1972)、陳樂壽和王天生(1985)論述了大地電磁阻抗視電阻率與相位之間的轉換關系.基于該轉換關系可以實現相位曲線和視電阻率曲線的相互校正(劉建利, 2013; 楊生等, 2001).因此,我們可以基于校正后的視電阻率信息對相位進行再校正.在一維情況下,大地電磁阻抗視電阻率和相位之間的轉換關系可以表示為(陳樂壽和王天生, 1985): (8) 其中,φ(f)為相位,z(g)為阻抗振幅,這里f和g為頻率.由式(8),可以得到下列近似表達式(陳樂壽和王天生, 1985): (9) (9)式為視電阻率ρa(f)和相位φ(f)之間的轉換關系式.該關系式雖然是在一維地電條件下導出的,但它在非一維地電條件下亦基本成立(楊生等, 2001). 用差分近似式(9)中的微分,可得: (10) 利用上式便可以實現基于視電阻率信息的相位校正. 海浪感應磁噪聲壓制與相位校正的主要步驟如下: (1)由于訓練字典過程中的輸入信號為二維訓練信號集,所以需將濾波后的一維時間序列按一定步長進行分段,并將分段信號作為二維矩陣的列向量進行組合; (2)設置初始字典D為ODCT字典,利用正交匹配追蹤算法對二維訓練集進行稀疏表示,獲得稀疏系數矩陣X; (3)利用K-SVD字典學習算法更新字典D; (4)重復步驟(2)和(3),在滿足迭代條件后,利用更新的字典DK-SVD和稀疏矩陣XK-SVD重構海浪感應磁噪聲; (5)對去噪后的MT數據進行Robust阻抗估計,并結合視電阻率信息進行相位校正. 綜上所述,海浪感應磁噪聲壓制與相位校正流程如圖2所示. 圖2 海浪感應磁噪聲壓制與相位校正流程圖Fig.2 Flow chart of wave-induced magnetic noise reduction and phase correction 采用模擬數據檢驗本文方法抑制海浪感應磁噪聲的效果.為此,首先分別模擬海洋大地電磁信號時間序列和海浪感應磁場時間序列.其次,將大地電磁水平磁場分量和海浪感應磁噪聲疊加獲得含噪信號,然后再利用K-SVD方法進行噪聲壓制,并與自適應噪聲完備集合經驗模態分解(Complete Ensemble Empirical Mode Decomposition with Adaptive Noise, CEEMDAN)(Torres et al., 2011; Colominas et al., 2014)和小波閾值去噪(張寶強, 2018)方法的處理結果進行對比.最后對去噪后的電磁數據進行Robust阻抗估計,并計算視電阻率和相位. 利用構造系統函數法模擬大地電磁數據,構造系統函數可以表示為(Loddo et al., 2002): (11) 式中,K1為比例系數,Ri為零點,Pi為極點(i=1,2,3,4).考慮到海水具有低通濾波的特性,為得到符合海洋大地電磁場特性的時間序列,經過測試實驗,本文選取的系數如下: K1=0.1; R1=0.01,R2=1.05,R3=10.0,R4=15.0; P1=-0.01,P2=-7.0,P3=-10.0,P4=-2.0. (12) 利用式(11)計算得到MT磁場信號的單邊譜,再將它擴展為雙邊譜.然后利用逆傅里葉變換,可得到MT磁信號時間序列.在阻抗Z(ω)已知的情況下,再利用阻抗關系式E(ω)=Z(ω)H(ω)便可以計算得到電場的頻譜序列.對電場頻譜序列進行逆傅里葉變換得到電場時間序列. 為了獲得海洋大地電磁模擬數據,設計如圖3所示兩個一維地電模型并進行正演計算,將得到的阻抗作為阻抗張量矩陣的非對角線元素.利用合成的阻抗張量矩陣可以得到四個電磁場水平分量的時間序列(湯井田等, 2013; 張寶強等, 2018).假定采樣頻率為10 Hz,采樣時長為1 h.利用上述方法得到的海洋大地電磁四個水平分量的時間序列如圖4所示. 圖3 兩個一維水平層狀地電模型 (a) 用于模擬Ex與Hy分量; (b) 用于模擬Ey與Hx分量.Fig.3 Two 1-D horizontal layered geoelectric models (a) Used to simulate the Ex and Hy components; (b) Used to simulate the Ey and Hx components. 圖4 模擬得到的四分量海洋大地電磁數據 (a),(b) 電場水平分量時間序列; (c),(d) 磁場水平分量時間序列.Fig.4 Simulated marine MT data (a),(b) Time series of horizontal components of electric field; (c),(d) Time series of horizontal components of magnetic field. 根據法拉第電磁感應定律,海浪切割地磁場會產生感應電流,從而產生二次感應磁場.海浪運動感應電場E和磁感應強度B滿足下列麥克斯韋方程組: (13) 其中,電流密度J=σmE+σmV×(F+B),σm為介質電導率,V為海浪運動速度,F為地磁場.由于B遠小于F,故電流密度可以近似為J=σm(E+V×F).海浪感應電磁場的模擬是在Weaver(1965)提出的模型基礎上進行的.基于線性疊加理論將同一頻率對應的所有傳播方向組成波產生的感應電磁場進行疊加,得到不同頻率海浪運動產生的感應電磁場(張寶強, 2018).在得到海浪運動感應磁場頻譜后,再對其進行逆傅里葉變換可得到相應的時間序列. 假設地磁場為50000 nT,風速為8 m·s-1,海水深度為50 m,采樣率為10 Hz,采樣時間為1 h.圖5顯示了模擬得到的海浪感應磁場時間序列和振幅譜(張寶強, 2018).模擬海浪感應磁噪聲的能量主要集中在0.08~0.2 Hz頻段內,表現為窄帶譜特征.在處理過程中,只在上文模擬獲得的MT磁場時間序列中加入海浪感應噪聲.圖6展示了加入海浪感應磁噪聲前后的時間序列和時頻譜.從圖中可以看到,加噪數據時頻譜在0.1 Hz附近出現了強能量帶. 為了驗證K-SVD字典學習方法抑制海浪感應磁噪聲的效果,將經過帶通濾波處理后的數據作為輸入數據,利用本文提出的方法進行去噪處理.K-SVD字典的大小為512×1024,X分量和Y分量數據的噪聲增益系數分別選為2.66和2.25,經過10次迭代提取出海浪感應磁噪聲.為了對比起見,分別將CEEMDAN和小波閾值去噪方法應用到海浪感應磁噪聲壓制中.利用CEEMDAN算法可以將輸入的含噪聲信號分解成有限個具有不同頻率成分的固有模態函數(Intrinsic Mode Function, IMF),通過舍棄與海浪感應磁噪聲相關的IMF實現壓制海浪感應磁噪聲的目的(于彩霞等, 2010).在實驗中,假定模態平均次數為500.在小波閾值去噪實驗中,選用dmey小波作為基函數,采用折衷閾值規則對經過小波分析得到的第5層和第6層細節系數進行閾值處理.最終得到的去噪結果如圖7所示.K-SVD字典學習方法能夠較為準確地提取出海浪感應磁噪聲,重構后的大地電磁磁信號誤差也較小. 為了進一步衡量去噪效果,引入三個評價指標,即重構信號信噪比(SNR),均方根誤差(RMSE)和歸一化互相關系數(NCC): (14) (15) (16) 其中,c(i)和r(i)分別代表無噪信號c和去噪信號r的第i個元素,L代表信號長度.分別計算帶噪聲 圖5 模擬海浪感應磁場X分量(a,b)和Y分量(c,d) (a),(c) 時間序列; (b),(d) 振幅譜.Fig.5 Simulated X component (a,b) and Y component (c,d) of the wave-induced magnetic field (a), (c) Time series; (b), (d) Amplitude spectrum. 圖6 模擬海洋大地電磁Hx分量(a,b,c)和Hy分量(d,e,f)加噪前后對比 (a),(d) 加噪前后時間序列; (b),(e) 加噪前時頻譜; (c),(f) 加噪后時頻譜.Fig.6 Simulated horizontal magnetic Hx component (a,b,c) and Hy component (d,e,f) (a), (d) Time series of clean signal and noisy signal; (b), (e) Spectrogram of clean signal; (c), (f) Spectrogram of noisy signal. 圖7 模擬海洋大地電磁Hx分量(a,b,c,d)和Hy分量(e,f,g,h)去噪前后時間序列細節對比Fig.7 Comparison of time series segment before and after denoising of simulated Hx (a,b,c,d) and Hy (e,f,g,h) components 圖8 去噪效果評價指標對比 (a) 信號信噪比(SNR); (b) 均方根誤差(RMSE); (c) 歸一化互相關系數(NCC).Fig.8 Comparison of evaluation indicators (a) Signal noise ratio; (b) Root mean squared error; (c) Normalized cross correlation. 圖9 模擬海洋大地電磁數據視電阻率曲線和相位曲線 圖中灰線和黑線代表無噪數據Robust阻抗估計結果. (a) 含噪聲信號; (b) CEEMDAN方法; (c) 小波閾值去噪方法; (d) K-SVD字典學習方法.Fig.9 Apparent resistivity and phase curves of simulated MT data The gray and black lines in the Figure represent the Robust impedance estimation results of clean data. (a) Noisy signal; (b) CEEMDAN method; (c) Wavelet method; (d) K-SVD dictionary learning method. 圖10 南黃海測站1實測海洋大地電磁數據 灰圈部分為由海浪運動感應磁噪聲引起的噪聲干擾. (a)—(d) 四分量海洋大地電磁數據時間序列; (e,f) 磁場水平分量振幅譜.Fig.10 Measured marine MT data from site 1 deployed in the South Yellow Sea The interference caused by the wave-induced magnetic noise can be seen clearly in the gray circle. (a)—(d) Time series of marine MT data; (e,f) Amplitude spectrum of horizontal component of magnetic field. 圖11 實測水平磁場Hx(a,b,c)和Hy(d,e,f)數據去噪效果對比 (a),(d) 去噪前后時間序列; (b),(e) 去噪前時頻譜; (c),(f) 去噪后時頻譜.Fig.11 Denoised results of measured horizontal magnetic Hx (a,b,c) and Hy (d,e,f) components (a),(d) Time series before and after denoising; (b),(e) Spectrogram of noisy signal; (c),(f) Spectrogram of denoised signal. 信號和經過上述方法去噪后信號的信噪比、均方根誤差以及歸一化互相關系數,計算結果如圖8所示.在經過CEEMDAN和小波閾值去噪方法處理后,MT數據的質量均得到改善.但經過K-SVD字典學習方法去噪后的信號具有更高的信噪比、更小的均方根誤差和更大的歸一化互相關系數.其中,Hx分量的信噪比由加噪后的-1.3093 dB提高為12.1848 dB,均方根誤差由0.5116減小至0.1082,歸一化互相關系數由0.6573提高為0.9694.Hy分量的信噪比由加噪后的1.3777 dB提高為12.5642 dB,均方根誤差由0.3618減小至0.0998,歸一化互相關系數由0.7602提高為0.9720. 對加入強能量噪聲后的電磁數據和分別經過CEEMDAN、小波閾值去噪和K-SVD字典學習方法去噪后的電磁數據進行Robust阻抗估計,并計算視電阻率和相位,計算結果如圖9所示.在加入海浪感應噪聲后,視電阻率和相位在受干擾的4~10 s周期范圍內出現較大程度的畸變.CEEMDAN和小波閾值去噪方法可以在一定程度上抑制視電阻率曲線的畸變.但經過K-SVD字典學習方法去噪處理后,視電阻率曲線和相位曲線變得更加光滑和連續.可見在強能量海浪感應噪聲干擾下,K-SVD字典學習方法能取得較好的去噪效果. 利用上述方法對南黃海三個測點(測站1、測站2和測站3)的實測海洋大地電磁數據進行處理分析,進一步驗證方法的應用效果.測區海域水深為21 m左右.以測站1為例,選擇平潮期采樣率為500 Hz、時長100 min的實測數據進行去噪處理.選擇平潮期數據是為了盡量減少由于潮汐運動所造成的電磁噪聲干擾(徐震寰和李予國, 2019).圖10顯示的是實測電磁場水平分量的時間序列和磁場水平分量的振幅譜.由圖10e和圖10f可見,磁場水平分量的振幅譜在頻率0.1~0.3 Hz內出現噪聲干擾,其中Hx分量尤為明顯. 利用上文方法對圖10所示的南黃海實測數據進行處理分析,其中Hx分量的帶通濾波范圍為0.1~0.25 Hz,Hy分量的帶通濾波范圍為0.1~0.2 Hz,字典D的大小選為1024×2048.由于實測數據的采樣率為500 Hz,而所要提取的海浪感應磁噪聲的主頻在10 s附近.此時字典中原子(列向量)的長度甚至不能覆蓋一個海浪感應磁信號的周期.為了從訓練集中尋找到與海浪感應磁噪聲特征相符合的原子,有必要對實測數據進行降采樣處理. 將經過10 Hz降采樣處理后的數據作為訓練集,在提取到海浪感應磁噪聲信號后,對其再以500 Hz進行升采樣處理.將升采樣數據從原始的磁場時間序列中減去,便可得到去噪后數據,去噪結果如圖11所示.由圖11c可見,去噪后的Hx分量中由海浪感應磁場引起的強能量得到壓制,恢復到正常的數量級.提取出的海浪感應磁噪聲如圖12所示,其時間序列與模擬的海浪感應磁噪聲相似,均具有窄帶譜的特征.而Hy分量由于受到海浪感應磁場的影響較小,去噪前后的時頻譜差異不大. 此外,我們也選取了1號站位Hx分量部分數據與南海實測大地電磁磁場數據進行了對比,結果見圖13.南海大地電磁數據采集于深水區,水深約767 m.與淺水環境相比,深水區所獲取的大地電磁數據受海浪運動影響較小,在0.1~0.3 Hz頻率范圍內沒有出現明顯的噪聲干擾,數據質量較高.在經過去噪后,南黃海實測數據時間序列中由海浪感應磁噪聲所造成的規律性正弦型干擾得到壓制. 圖12 提取的海浪感應磁噪聲 (a) 時間序列; (b) 振幅譜.Fig.12 The wave-induced magnetic noise extracted by the K-SVD method (a) Time series; (b) Amplitude spectrum. 同樣地,利用Robust阻抗估計方法對去噪前后的實測數據進行阻抗估計并計算視電阻率和相位.由于相對較高頻部分(>0.1 Hz)存在隨機噪聲干擾,在處理中選擇小時窗進行阻抗估計,從而可以獲得較多窗口疊加.而低頻部分則選擇大時窗進行阻抗估計.最后將這兩部分數據進行拼接處理,得到最終的視電阻率曲線和相位曲線,如圖14所示.圖14a展示的是去噪前的結果,可見在海浪感應磁場的影響下,TE模式和TM模式的視電阻率曲線、相位曲線在周期3~10 s之間均出現了畸變.而其他時段因為受到的海浪感應噪聲干擾較小,視電阻率曲線和相位曲線相對比較光滑.經過K-SVD算法去噪后的結果見圖14b,視電阻率曲線得到明顯改善,在周期3~10 s之間變得比較光滑.雖然相位曲線相較于原始數據的結果也有了改善,但是在周期4~5 s之間有一個頻點的結果不理想.利用式(10)對其校正,結果見圖14c.經過相位校正后,相位曲線變得更加連續. 利用相同的方法,對南黃海測站2和測站3的實測大地電磁數據進行了去噪處理,經Robust阻抗估計后得到的視電阻率和相位曲線如圖15所示.實測數據的處理結果表明,K-SVD字典學習方法可以有效地壓制海浪感應磁噪聲干擾,提高MT數據的質量.同時能夠基于校正后的視電阻率信息實現相位校正,最終得到的視電阻率與相位曲線更加連續、光滑. 淺水區的大地電磁勘探極易受到海浪感應電磁場的影響,海浪對磁場的影響主要集中在1~30 s的周期范圍內,呈現出貫穿全時段的強能量干擾.為壓制海浪感應磁噪聲,本文將K-SVD字典學習方法與相位校正方法應用于海洋MT數據處理中.通過仿真測試以及南黃海實測數據的處理分析,結果表明該方法能夠有效壓制海浪感應磁噪聲,提高MT觀測數據的質量,并改善視電阻率及相位曲線. 圖13 南黃海(水深21 m)與南海(水深767 m)實測 大地電磁數據對比 (a) 時間序列; (b) 南黃海測站1部分數據去噪前后的 振幅譜; (c) 南海數據的振幅譜.Fig.13 Comparison of marine MT data from the South Yellow Sea (21 m) and the South China Sea (767 m) (a) Time series; (b) Amplitude spectrum of data from South Yellow Sea; (c) Amplitude spectrum of data from South China Sea. 本文提出的方法適用于提取時間序列中規律性信號.在實際的去噪工作中,通常需要經過多次試驗確定最優噪聲增益系數.如何高效、準確地尋找最優增益系數是需要進一步研究的工作. 致謝感謝三位匿名審稿專家給出的寶貴的意見和建議.本文的研究工作受到國家自然科學基金項目的資助,在此表示誠摯的感謝. 圖14 測站1實測數據視電阻率和相位曲線 (a) Robust估計; (b) 經K-SVD方法去噪后; (c) 經相位校正后.Fig.14 Apparent resistivity and phase curves of measured data from site 1 (a) Robust estimation; (b) K-SVD method; (c) Phase correction.



1.2 基于視電阻率信息的相位校正方法
1.3 海浪感應磁噪聲壓制與相位校正流程

2 模擬數據噪聲抑制
2.1 模擬海洋MT信號時間序列



2.2 模擬海浪感應磁場時間序列





3 實測數據噪聲抑制
4 結語


猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06