基于FESTO實驗平臺的機械手液壓系統的設計與實現
2022-05-06 07:39:14彭先麗李紅宇
中國新技術新產品 2022年3期
關鍵詞:動作
彭先麗 李紅宇 王 偉
(昆明鐵道職業技術學院,云南 昆明 650208)
0 引言
液壓搬運機械手是一種可以實現自動抓取、搬運和操作的機械裝置。機械手能按照給定的工藝要求完成各種復雜的動作。機械手在一定程度上能取代人的操作,可以節約用工成本,還可以在一定程度上提高生產效率,從而加快機械化和自動化的進程。隨著科技的發展,機械手在現代制造業中的作用越來越明顯,已成為現代制造業中很重要的一部分,但在實際應用中,普通的機械手沒有傳感器反饋能力和自動調節能力,很難檢測外界環境或工件位置的變化情況,導致機械手出現損壞的現象。而且,在實際應用中通常以氣動機械手為主,由于氣壓傳動輸出的力相對較小,因此氣動機械手只能在輸出負載小的場合中應用。
基于上述原因,該文設計了基于液壓控制的機械手系統,該系統不僅能提起、移動以及放下物體,而且輸出力較大,該液壓系統能代替人的繁重勞動,達到生產自動化和機械化的目標。通過該機械手液壓系統的設計、仿真分析及試驗運行調試可知,機械手液壓系統的設計基本達到自動抓取、搬運和運動平穩等性能要求。
1 機械手液壓控制系統總體設計
該機械手液壓系統能控制機械手手臂做出上升、下降、伸出、縮回、回轉以及手指松開、夾緊等動作,整個控制系統主要包括液壓系統回路、電氣控制回路、各種傳感器以及行程開關等,該文在設計中采用多個傳感器和行程開關對機械手在運行過程中的位置進行監控。
1.1 機械手液壓系統設計及原理分析
該文設計的機械手采用液壓驅動方式,具體原理如圖1所示,采用液壓缸來完成機械手手臂收縮、手指夾緊、手臂升降和手臂回轉等動作。根據工況要求,該執行機構要具有機械手手臂升降、伸縮、回轉和手指松夾等功能。執行部件的機械部分由手臂的升降機構、伸縮機構、回轉機構及手指松夾機構等組成,每個運動部分都由液壓缸來驅動與控制。機械手的動作循環過程如下:手臂上升→手臂前伸→手指夾緊(抓料)→手臂回轉→手臂下降→手臂松開(卸料)→手臂縮回→手臂反轉(復位)→原位停止。
在機械手液壓系統中,各功能液壓缸的組成如下:1)手臂回轉。單葉片擺動缸(該文用液壓馬達來模擬其動作過程)。2) 手臂升降。單桿活塞式液壓缸。3) 手臂伸縮。單桿活塞式液壓缸。4) 手指松夾。無桿的活塞缸(該文用單桿活塞缸來模擬其動作過程)。
設計說明:在該設計中,用液壓缸5來模擬手指的松夾動作,用液壓馬達18來模擬機械手的回轉動作。
在整個液壓系統的設計過程中,涉及許多液壓元件,包括方向控制閥、壓力控制閥、流量控制閥、各種傳感器以及行程開關等。具體的元件如圖1所示。
1.2 機械手液壓系統的電磁鐵動作順序表
為了保證機械手能按預設的規定動作過程運行,控制各個液壓缸的電磁閥之間要按一定的先后順序依次動作,分析機械手的動作循環過程可以得到機械手電磁鐵動作順序,見表1。
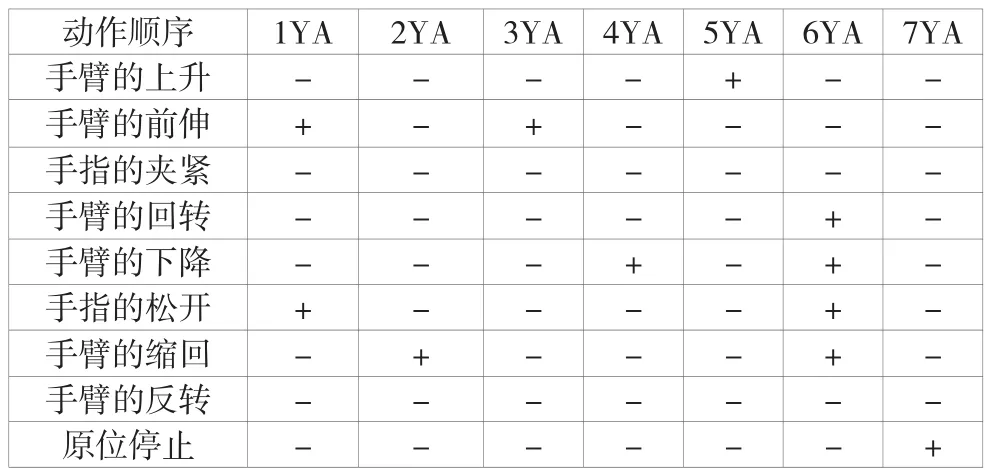
表1 機械手的電磁鐵動作順序表
1.3 機械手液壓系統的工作原理
結合圖1和表1對機械手液壓系統中手臂的各部分動作過程進行分析。
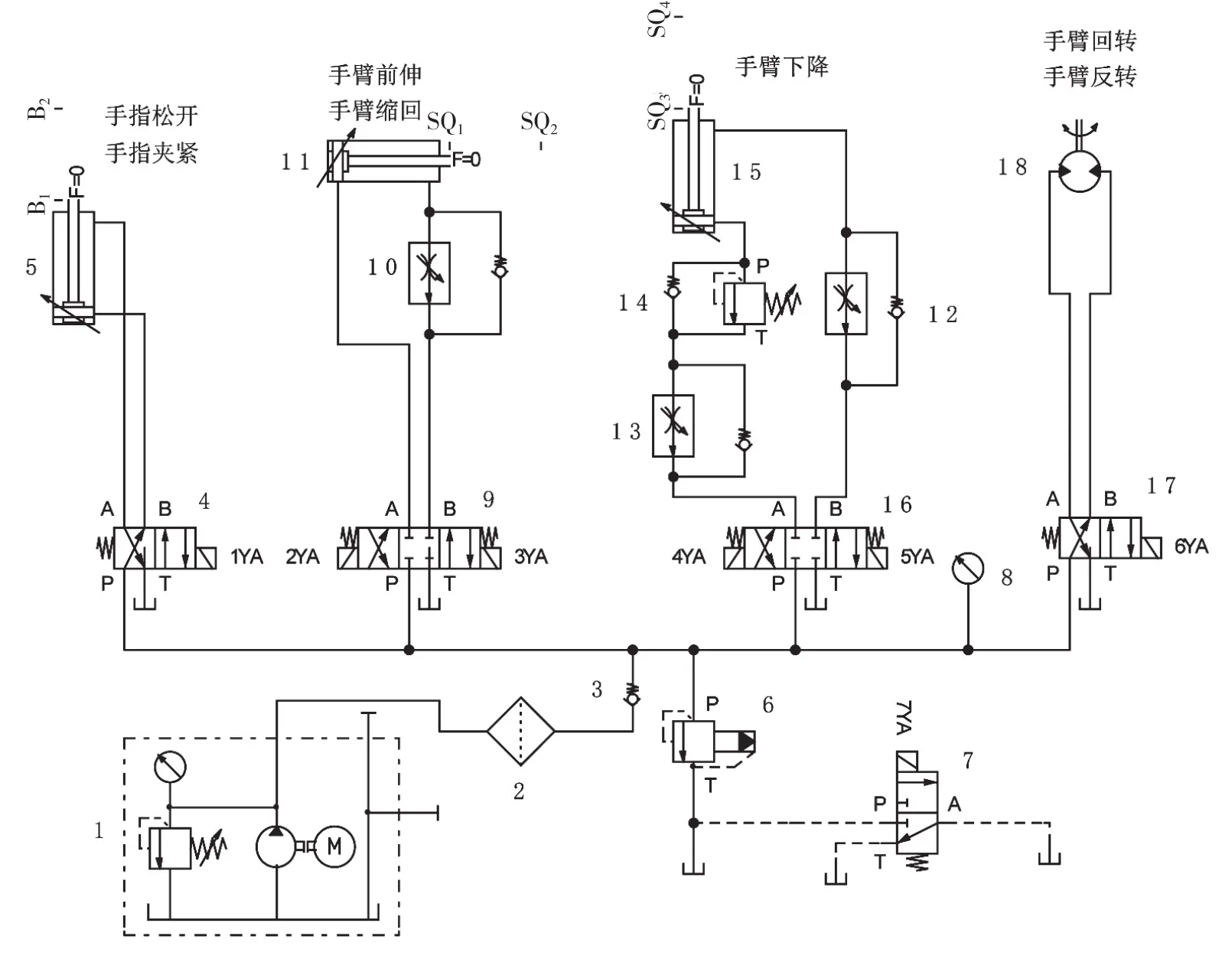
圖1 搬運機械手液壓原理圖
機械手手臂的上升過程由三位四通電磁換向閥控制,當5YA得電時,三位四通電磁換向閥的右位工作,單桿活塞式液壓缸的活塞上升,進而使手臂做上升動作。油路的具體連接如下:1) 進油路。液壓源→濾油器→單向閥→電磁換向閥(右位)→調速閥→順序閥→單桿活塞式液壓缸(下腔) 。2)回油路。單桿活塞式液壓缸(上腔)→調速閥→電磁換向閥(右位)→油箱。單桿活塞式液壓缸的活塞上升速度由單向調速閥調節,運動較平穩。
機械手手臂的伸縮過程由三位四通電磁換向閥控制,當3YA得電時,三位四通電磁換向閥的右位工作,單桿活塞式液壓缸向右移動,使手臂前伸。油路的具體連接如下:1) 進油路。 液壓源→濾油器→單向閥→電磁換向閥(右位)→單桿活塞式液壓缸(左腔)→液壓缸向右移。2) 回油路。單桿活塞式液壓(右腔)→調速閥→電磁換向閥(右位)→油箱。
同時,1YA得電,二位四通電磁換向閥的右位工作,完成機械手手臂的手指松開的動作,油路的具體連接如下:1)進油路。 液壓源→濾油器→單向閥→電磁換向閥(右位)→單桿活塞式液壓缸(左腔) →液壓缸向下移。2) 回油路。液壓缸(下腔)→電磁換向閥(右位)→油箱。
手指的夾緊過程如下:1YA 失電→電磁換向閥(左位)→活塞上移→手指夾緊。
機械手手臂的回轉過程由三位四通電磁換向閥控制,當6YA得電時,三位四通電磁換向閥的右位工作,液壓馬達按逆時針轉動,完成手臂回轉的動作,油路的具體連接如下:1) 進油路。 液壓源→濾油器→單向閥→電磁換向閥(右位)→液壓馬達(左腔)→手臂回轉。2) 回油路。液壓馬達(右位)→電磁換向閥(右位)→油箱。
機械手手臂的下降過程由三位四通電磁換向閥控制,當4YA得電時,三位四通電磁換向閥的左位工作,同時6YA也處于得電狀態,液壓缸向下移動,完成手臂下降的動作,油路的具體連接如下:1) 進油路。液壓源→濾油器→單向閥→電磁換向閥(左位)→單向調速閥→液壓缸(上腔)→手臂下降。2) 回油路。液壓缸(下腔)→單向順序閥→單向調速閥→電磁換向閥(左位)→油箱。
手指松開的過程如下:1YA 失電→電磁換向閥(右位)→活塞下移→手指松開 。同時,6YA 得電→電磁換向閥(右位)→手臂回轉。
機械手手臂的伸縮過程由三位四通電磁換向閥控制,當2YA得電時,三位四通電磁換向閥的左位工作,液壓缸向左移動,使手臂回縮,油路的具體連接如下:1) 進油路。液壓源→濾油器→單向閥→電磁換向閥(左位)→調速閥→液壓缸(右腔)→液壓缸向左移。2) 回油路。單桿活塞式液壓(左腔)→電磁換向閥(左位)→油箱。同時,6YA也處于得電狀態,手臂仍處于回轉狀態。
當6YA失電時,三位四通電磁換向閥的左位工作,液壓馬達按順時針轉動,從而使手臂做反轉動作。
當7YA得電時,液壓動力源中的液壓泵經先導式溢流閥實現卸荷。
2 機械手液壓系統電氣回路的設計
根據機械手液壓系統的電磁閥動作順序設計機械手電氣控制回路原理圖。搬運機械手電氣回路圖如圖2所示。液壓機械手電氣控制部分主要采用按鈕、繼電器、行程開關、電磁閥線圈及傳感器對機械手動作過程進行控制和調節。
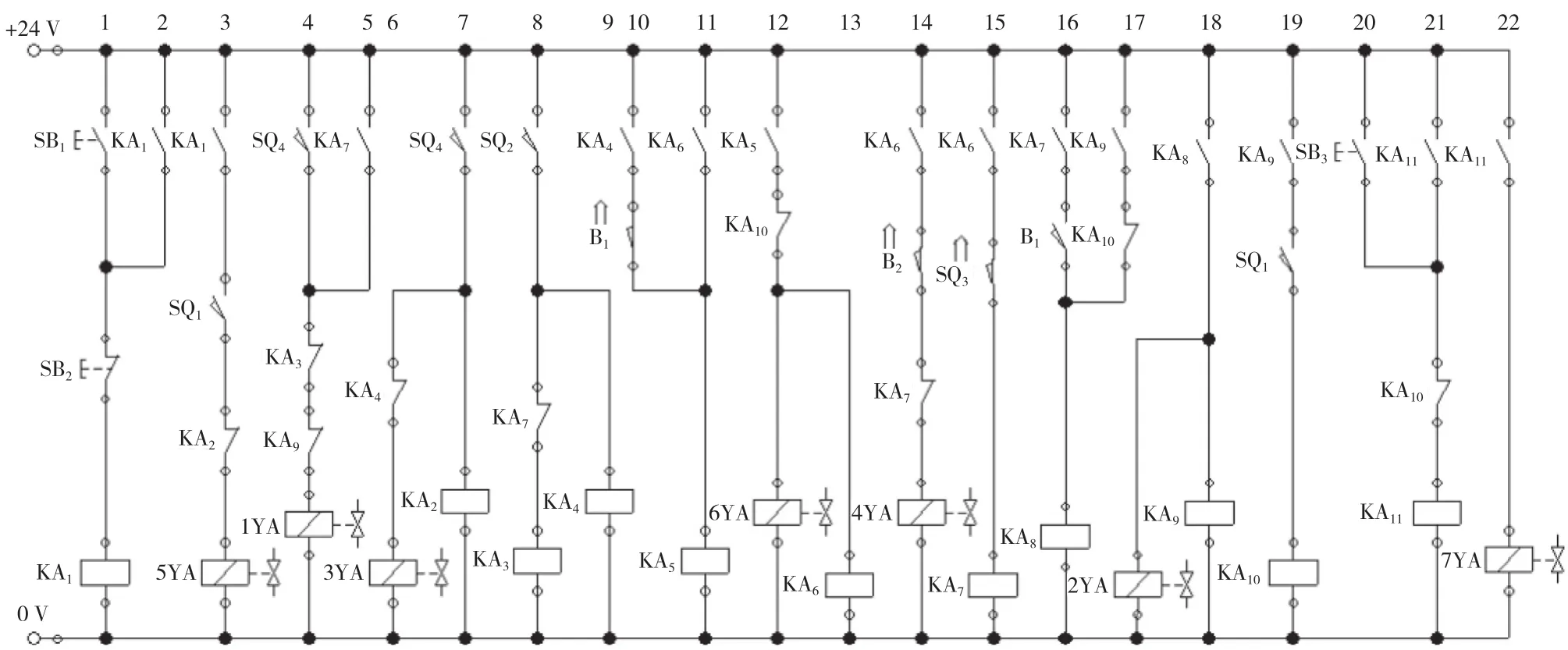
圖2 搬運機械手電氣回路圖
機械手液壓系統電氣回路的控制原理如下:1) 手臂上升。5YA(+)。按下啟動按鈕SB,中間繼電器KA得電,其常開觸點閉合,在初始位置的SQ行程開關被壓下去,電磁鐵5YA得電,使手臂做上升動作。2) 手臂前伸。1YA(+)、3YA(+)。當手臂上升到一定位置時,會觸碰行程開關SQ,使電磁鐵1YA和3YA得電。同時,中間繼電器KA得電,其常閉觸點斷開,使電磁鐵5YA失電,從而完成手臂前伸和手指松開的動作。3)手指夾緊。1YA(-)。當手臂前伸到一定位置時,觸碰行程開關SQ,使中間繼電器KA和KA得電。KA、KA常閉觸點斷開,分別使電磁鐵1YA、3YA失電,使手指夾緊。 4)手臂回轉。6YA(+)。當KA常開觸點閉合、傳感器B感應到手指夾緊時,繼電器KA得電,其常開觸點閉合,電磁鐵6YA和繼電器KA得電,使手臂做回轉動作。5)手臂下降。4YA(+)、6YA(+)。當KA常開觸點閉合時,使電磁鐵4YA得電,使手臂做下降動作。6)手指松開。1YA(+)、6YA(+)。當手臂下降到一定位置時,會觸碰行程開關SQ,使中間繼電器KA得電,其常閉觸點斷開,使電磁鐵4YA和中間繼電器KA3失電,KA觸點復位,其常開觸點閉合,使電磁鐵1YA再次得電,從而完成手指松開的動作。7)手臂縮回。2YA(+)、6YA(+)。當KA常開觸點閉合、傳感器B1感應到手指松開時,中間繼電器KA得電,其常開觸點閉合,使電磁鐵2YA和中間繼電器KA得電。KA常閉觸點斷開,使電磁鐵1YA失電,從而完成手臂縮回的動作。8)手臂反轉。6YA(-)。當手臂縮回到一定位置時,觸碰行程開關SQ,KA常開觸點閉合,使中間繼電器KA得電,其常閉觸點斷開,電磁鐵6YA失電,使做手臂反轉動作。9)原位停止。7YA(+)。按下按鈕SB,中間繼電器KA得電,其常開觸點閉合,回路自鎖,另一觸點使電磁鐵7YA得電,使機械手原位停止。10)停止。按下停止按鈕SB,中間繼電器KA失電,其觸點復位,整個電氣控制回路失電,機械手動作完一次工作后停止。
3 搬運機械手液壓系統的仿真
根據動作要求在仿真軟件上繪制搬運機械手液壓回路圖和電氣控制圖,并用FluidSIM-H液壓仿真軟件對其進行仿真。仿真結果顯示,該文所設計的機械手液壓系統能滿足機械手的手臂動作要求,并按其動作順序進行連續動作。該文僅以機械手手臂的回轉動作為例來驗證其仿真過程,機械手手臂回轉過程的仿真如圖3所示。當按下SB時,繼電器KA得電,其常開觸點閉合,同時觸碰到SQ行程開關,電磁閥線圈5YA得電,電磁換向閥的右位工作,液壓缸活塞前伸,手臂上升。當手臂上升到一定位置時,壓下行程開關SQ,使電磁閥線圈1YA和3YA得電,電磁閥4和電磁閥9的右位工作,液壓缸5活塞下降,手指松開;液壓缸11活塞前伸,手臂前伸。同時,中間繼電器KA得電,其常閉觸點斷開,使電磁鐵5YA斷開,電磁閥16為常態位工作。當手臂前伸到一定位置,觸碰到行程開關SQ,使繼電器KA和KA得電。KA、KA常閉觸點斷開,分別使電磁閥線圈1YA、3YA失電,電磁閥4和電磁閥9為常態位工作,液壓缸5活塞上升,手指夾緊。當KA常開觸點閉合、傳感器B感應到手指夾緊時,中間繼電器KA得電,其常開觸點閉合,使電磁閥線圈6YA得電,電磁閥17的右位工作。當液壓缸伸出時,就可以實現手臂回轉的動作。
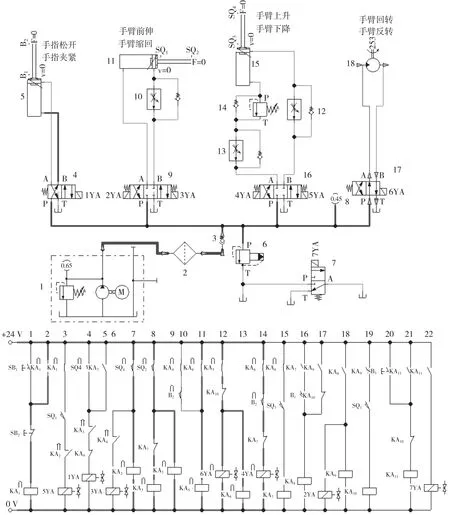
圖3 手臂回轉的仿真圖
4 搬運機械手液壓系統運行調試及結果分析
首先,在FESTO液壓試驗臺上根據仿真后的液壓系統圖或元件明細表選取并安裝固定元件。其次,根據機械手液壓系統圖安裝各元器件并緊固,連接時按進油路和回油路進行連接,連接時要仔細,不能出現漏接或錯接現象。最后,根據機械手液壓系統的電氣控制線路圖完成電路連接工作,最終完成機械手液壓系統回路的組裝過程,如圖4所示。連接無誤后再對系統進行調試并運行。試驗結果顯示,該文設計的機械手液壓系統能在Festo液壓實訓裝置上模擬其動作過程,基本達到設計的目的及要求。最終,機械手可以實現手臂上升、手臂前伸、手指夾緊(抓料)、手臂回轉、手臂下降、手臂松開(卸料)、手臂縮回、手臂反轉(復位)以及原位停止(卸荷)多個動作過程(并能循環工作)。

圖4 搬運機械手液壓系統回路的組裝與調試
5 機械手液壓系統特點分析
機械手液壓系統特點如下:1) 機械手液壓系統的控制采用電磁閥換向,并與電氣控制相結合,具有操作方便、靈活以及自動化程度高等特點。2) 采用雙作用的單桿活塞式液壓缸驅動手臂伸縮和升降,手臂升降和伸縮的速度分別由單向調速閥10、單向調速閥12以及單向調速閥13控制,并采用回油路節流調速方式,其運動平穩性好。手臂的回轉和反轉過程由單葉片擺動液壓缸驅動。3) 采用立式液壓缸來控制手臂的升降,為支承運動部件的自重,回路中采用單向順序閥14的平衡回路,可以有效防止手臂自行下滑或超速。 4) 為了使手指夾緊缸在夾緊工件后不受系統壓力波動的影響,并保證能夾緊工件,回路中采用失電夾緊對其進行控制,更加安全、可靠。5) 與其他驅動方式相比,液壓機械手的控制具有傳遞動力大、傳動平穩性高等優點。
6 結論
在工業生產中,液壓搬運機械手被廣泛地應用于各個行業。該文對搬運機械手液壓系統進行設計,首先,分析液壓機械手要達到的目的,并對手指夾緊、手臂伸縮、手臂升降以及手臂回轉等動作過程進行分析。其次,對搬運機械手的液壓系統圖和電氣控制回路圖進行設計,并用液壓仿真軟件Fluid SIM-H對其進行仿真分析。最后,在FESTO實驗平臺上對其進行模擬運行調試,調試結果表明,該機械手液壓系統能實現手臂上升、手臂前伸、手指夾緊(抓料)、手臂回轉、手臂下降、手臂松開(卸料)、手臂縮回、手臂反轉(復位)以及原位停止(卸荷)多個動作過程。
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27