基于卷積神經(jīng)網(wǎng)絡(luò)的時(shí)頻域CT重建算法
2022-05-07 07:08:30李昆鵬張鵬程上官宏王燕玲桂志國(guó)
計(jì)算機(jī)應(yīng)用 2022年4期
李昆鵬,張鵬程*,上官宏,王燕玲,楊 婕,桂志國(guó)
(1.中北大學(xué)信息與通信工程學(xué)院,太原 030051;2.生物醫(yī)學(xué)成像與影像大數(shù)據(jù)山西省重點(diǎn)實(shí)驗(yàn)室(中北大學(xué)),太原 030051;3.太原科技大學(xué)電子信息工程學(xué)院,太原 030024;4.山西財(cái)經(jīng)大學(xué)信息學(xué)院,太原 030006;5.山西中醫(yī)藥大學(xué)健康服務(wù)與管理學(xué)院,太原 030024)
0 引言
X 射線計(jì)算機(jī)斷層掃描(Computed Tomography,CT)是一種在臨床和工業(yè)中被廣泛使用的成像技術(shù)。在斷層成像中所需解決的主要問(wèn)題是如何通過(guò)投影數(shù)據(jù)恢復(fù)出圖像數(shù)據(jù)。隨著斷層成像技術(shù)在許多領(lǐng)域中的廣泛使用,眾多研究人員致力于研究CT 重建方法。目前主要的CT 重建方法可分為三類(lèi):解析重建算法、迭代重建算法和基于神經(jīng)網(wǎng)絡(luò)的重建方法。
依據(jù)傅里葉中心切片定理,解析重建算法建立了待重建物體的Radon 變換與其二維傅里葉變換之間聯(lián)系。濾波反投影(Filtered Back-Projection,F(xiàn)BP)算法是經(jīng)典的解析重建算法,廣泛應(yīng)用于CT 重建中。FBP 算法的優(yōu)點(diǎn)是計(jì)算速度快,計(jì)算存儲(chǔ)消耗小;然而,當(dāng)投影數(shù)據(jù)角度較少或投影數(shù)據(jù)中包含大量噪聲時(shí),該算法重建所得圖像質(zhì)量將大幅降低。
區(qū)別于解析重建算法僅對(duì)投影數(shù)據(jù)處理,CT 重建迭代算法同時(shí)考慮投影數(shù)據(jù)和重建圖像的統(tǒng)計(jì)特性。迭代重建算法通過(guò)給目標(biāo)函數(shù)添加不同的正則項(xiàng),從而包含了不同的統(tǒng)計(jì)模型,如全變分(Total Variation,TV)、廣義全變分、非局部信息和字典學(xué)習(xí)等。在目標(biāo)函數(shù)中使用正則項(xiàng),顯著地提升了重建后圖像的視覺(jué)效果。然而,為了獲得較好的重建結(jié)果,需要謹(jǐn)慎設(shè)置迭代算法中的超參數(shù)以及嚴(yán)格控制迭代次數(shù)。在迭代重建算法求解過(guò)程中,導(dǎo)致計(jì)算代價(jià)高的主要原因是反復(fù)進(jìn)行的投影/反投影運(yùn)算。盡管能通過(guò)并行計(jì)算方法對(duì)該部分進(jìn)行加速,但是仍舊比解析重建算法消耗更多計(jì)算時(shí)間和儲(chǔ)存空間。
近年來(lái),深度學(xué)習(xí)在計(jì)算機(jī)視覺(jué)和自然語(yǔ)言處理領(lǐng)域得到了廣泛的應(yīng)用。卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network,CNN)是目前應(yīng)用最廣泛的深度學(xué)習(xí)算法之一。由于很難采用CNN 表征投影域到圖像域之間的復(fù)雜映射關(guān)系,因而文獻(xiàn)[16-17]在網(wǎng)絡(luò)中使用全連接技術(shù)建立CT 重建網(wǎng)絡(luò)。在重建網(wǎng)絡(luò)中采用全連接技術(shù)導(dǎo)致網(wǎng)絡(luò)規(guī)模過(guò)大,增加了網(wǎng)絡(luò)訓(xùn)練和實(shí)際應(yīng)用的難度。
為了避免在CT 重建網(wǎng)絡(luò)中使用全連接技術(shù),研究人員將迭代重建算法的迭代過(guò)程展開(kāi)成固定的N
步迭代,用CNN替換其中每一次迭代。一方面,迭代重建算法的正則項(xiàng)可以直接用CNN 進(jìn)行替換;另一方面,通過(guò)交替方向乘子法將目標(biāo)函數(shù)分解為幾個(gè)子目標(biāo)函數(shù),這些子目標(biāo)函數(shù)優(yōu)化結(jié)果等價(jià)于原目標(biāo)函數(shù)的優(yōu)化結(jié)果。部分子目標(biāo)函數(shù)可以通過(guò)CNN 實(shí)現(xiàn),從而避免了在重建網(wǎng)絡(luò)中使用全連接技術(shù),減少了重建網(wǎng)絡(luò)的參數(shù)量。但是相較于解析重建算法,這類(lèi)方法所需計(jì)算量仍然非常大。與上述兩類(lèi)基于神經(jīng)網(wǎng)絡(luò)的重建方法不同,雙域重建算法采用反投影算子來(lái)實(shí)現(xiàn)投影域數(shù)據(jù)到圖像域數(shù)據(jù)的轉(zhuǎn)換,在投影域與圖像域分別利用CNN 進(jìn)行濾波和圖像恢復(fù)。該類(lèi)方法避免了在重建網(wǎng)絡(luò)中使用全連接技術(shù),且相較于迭代展開(kāi)重建算法,減少了重建所需計(jì)算量,因而被越來(lái)越多的研究人員采用。
與傳統(tǒng)FBP 算法相比,使用特殊的濾波器替換原有理想斜坡濾波器對(duì)投影數(shù)據(jù)進(jìn)行濾波,可以得到與迭代重建算法重建視覺(jué)效果相近的結(jié)果。該濾波器可以通過(guò)對(duì)迭代重建算法進(jìn)行理論推導(dǎo)直接得出,也可以通過(guò)迭代重建算法進(jìn)行優(yōu)化求解得出。根據(jù)傅里葉中心切片定理可知,未經(jīng)過(guò)濾波而直接進(jìn)行反投影將引起重建圖像的低頻分量過(guò)度加權(quán),導(dǎo)致圖像變得模糊。傳統(tǒng)FBP 算法的濾波器為理想斜坡濾波器,該濾波器是一個(gè)高通濾波器,在實(shí)際應(yīng)用中很難實(shí)現(xiàn)。對(duì)此,常采用加窗的方法對(duì)理想斜坡濾波器進(jìn)行修正。通常使用理想矩形窗對(duì)理想斜坡濾波器進(jìn)行加窗得到Ram-Lak 濾波器。雖然采用Ram-Lak 濾波器重建的圖像可以有效地去除重建圖像低頻模糊效應(yīng),但是重建圖像會(huì)存在明顯的Gibbs 震蕩現(xiàn)象。針對(duì)Ram-Lak 濾波器所引起的重建圖像震蕩效應(yīng),文獻(xiàn)[2]提出選取sinc 函數(shù)作為窗函數(shù)得到Shepp-Logan 濾波函數(shù),該方法彌補(bǔ)了Ram-Lak 濾波器的不足;但是Shepp-Logan 濾波器在低頻段偏離理想濾波器,導(dǎo)致重建圖像的低頻部分視覺(jué)效果差。解析重建算法還易受投影數(shù)據(jù)質(zhì)量的影響,當(dāng)投影數(shù)據(jù)角度較少或投影數(shù)據(jù)中包含大量噪聲時(shí),重建所得圖像視覺(jué)效果明顯變差。理論上說(shuō),采用特殊的濾波器對(duì)投影數(shù)據(jù)進(jìn)行濾波,可以進(jìn)一步改善傳統(tǒng)FBP 算法重建圖像中低頻偏離、高頻震蕩等現(xiàn)象。
針對(duì)采用時(shí)域?yàn)V波器進(jìn)行解析重建導(dǎo)致重建后圖像存在偽影和圖像細(xì)節(jié)丟失等問(wèn)題,本文利用卷積神經(jīng)網(wǎng)絡(luò)強(qiáng)大的特征提取和表達(dá)能力,設(shè)計(jì)了一個(gè)結(jié)合頻域處理的雙域CT 重建神經(jīng)網(wǎng)絡(luò)(Dual Domain Frequency Network,DDFre-Net)。本文主要工作有以下幾點(diǎn):1)為了解決時(shí)域?yàn)V波器進(jìn)行解析重建導(dǎo)致重建后圖像存在偽影和圖像細(xì)節(jié)丟失的問(wèn)題,在頻域使用CNN 對(duì)投影數(shù)據(jù)進(jìn)行處理,構(gòu)建了投影域網(wǎng)絡(luò)Fre-CNN;2)為了解決在投影域到圖像域轉(zhuǎn)過(guò)程中使用全連接技術(shù)而導(dǎo)致網(wǎng)絡(luò)參數(shù)量大的問(wèn)題,實(shí)現(xiàn)了正投影/反投影線性算子,構(gòu)建了反投影層;3)為了提高重建網(wǎng)絡(luò)在訓(xùn)練過(guò)程中的收斂速度,獲得較高質(zhì)量的重建圖像,構(gòu)建了圖像域網(wǎng)絡(luò)Img-CNN;4)為了抵消神經(jīng)網(wǎng)絡(luò)對(duì)結(jié)果圖像的模糊效應(yīng),保留重建圖像細(xì)節(jié),在原最小均方誤差損失函數(shù)基礎(chǔ)上引入多尺度結(jié)構(gòu)相似度損失函數(shù)來(lái)組成復(fù)合損失函數(shù)以保留更多重建圖像的細(xì)節(jié)。為了驗(yàn)證本文算法的有效性,將本文算法與FBP 算法、TV 算法、殘差編解碼卷積神經(jīng)網(wǎng)絡(luò)(Residual Encoder-Decoder CNN,RED-CNN)算法在臨床數(shù)據(jù)集上作對(duì)比。實(shí)驗(yàn)結(jié)果表明,本文算法重建的圖像偽影少,信噪比高,且速度快。
1 DDFre-Net
本文構(gòu)建了一個(gè)基于雙域的CT 重建網(wǎng)絡(luò)DDFre-Net,該網(wǎng)絡(luò)結(jié)合了投影數(shù)據(jù)頻域處理和圖像數(shù)據(jù)時(shí)域處理,總體架構(gòu)如圖1(a)所示。DDFre-Net 主要由三部分組成:投影數(shù)據(jù)頻域處理網(wǎng)絡(luò)Fre-CNN、反投影層(Back-Projection)和圖像數(shù)據(jù)時(shí)域處理網(wǎng)絡(luò)Img-CNN。在DDFre-Net 中,輸入的投影數(shù)據(jù)首先在Fre-CNN 中進(jìn)行處理。在Fre-CNN 中,投影數(shù)據(jù)先經(jīng)Spa2Fre 層進(jìn)行傅里葉變換,然后經(jīng)過(guò)頻域編解碼的CNN處理,最后在Fre2Spa 層進(jìn)行傅里葉反變換。反投影層(Back-Projection)實(shí)現(xiàn)了投影域到圖像域的變換功能,該層網(wǎng)絡(luò)的參數(shù)是固定的。在DDFre-Net 的圖像域處理中,Img-CNN 對(duì)反投影層輸出的圖像進(jìn)行進(jìn)一步恢復(fù),最終得到重建圖像。DDFre-Net 是一個(gè)端到端的卷積神經(jīng)網(wǎng)絡(luò),在網(wǎng)絡(luò)的輸出端采用統(tǒng)一的損失函數(shù)對(duì)網(wǎng)絡(luò)進(jìn)行約束。
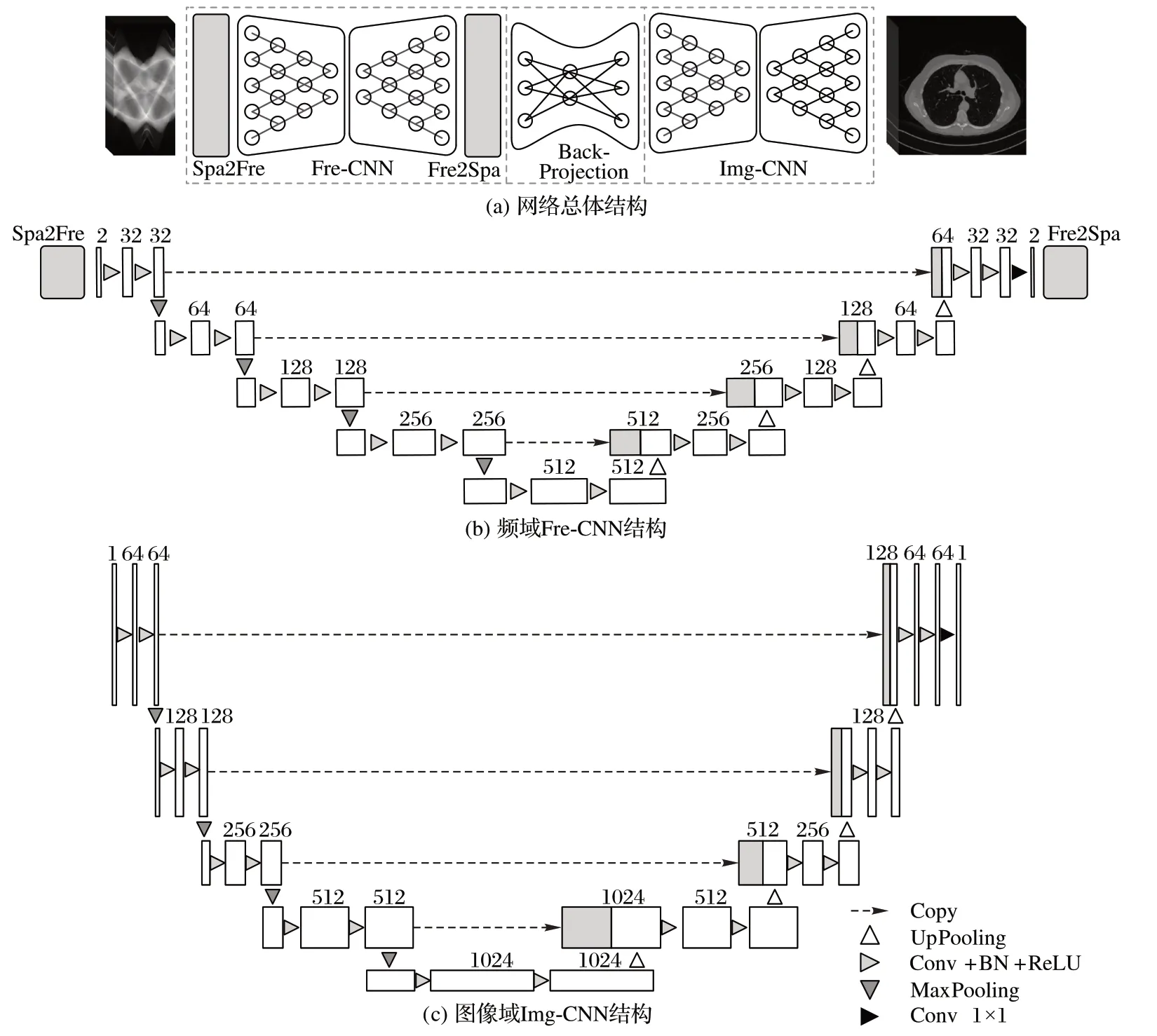
圖1 DDFre-Net結(jié)構(gòu)Fig.1 DDFre-Net structure
1.1 投影域網(wǎng)絡(luò)
在傳統(tǒng)FBP 算法中,通常采用理想斜坡濾波器對(duì)投影數(shù)據(jù)進(jìn)行濾波處理從而改善重建圖像后圖像的質(zhì)量。對(duì)投影數(shù)據(jù)的濾波處理可以在時(shí)域進(jìn)行,也可以在頻域進(jìn)行。時(shí)域?yàn)V波是通過(guò)將投影數(shù)據(jù)與時(shí)域?yàn)V波器進(jìn)行離散卷積實(shí)現(xiàn);頻域?yàn)V波則是先各自將投影數(shù)據(jù)和濾波器進(jìn)行傅里葉變換,在頻域?qū)⒍咧苯酉喑藢?shí)現(xiàn)。
傳統(tǒng)FBP 算法中的理想濾波器是根據(jù)傅里葉中心切片定理推導(dǎo)得到。由于該理想濾波器是個(gè)頻帶無(wú)限的濾波函數(shù),很難直接在實(shí)際中應(yīng)用。因而,為了精確地表征該斜坡濾波器,Ghani 等利用CNN 替換理想斜坡濾波器,對(duì)投影數(shù)據(jù)進(jìn)行濾波處理;Whiteley 等針對(duì)由于探測(cè)器損壞或靈敏度不足而導(dǎo)致的投影數(shù)據(jù)缺失的問(wèn)題,利用CNN 在時(shí)域?qū)φ娮影l(fā)射型計(jì)算機(jī)斷層顯像(Positron Emission computed Tomography,PET)投影數(shù)據(jù)進(jìn)行恢復(fù)和濾波處理。Wang 等在頻域中利用CNN 對(duì)PET 投影數(shù)據(jù)進(jìn)行濾波。相較于CNN 在時(shí)域中的濾波處理,頻域處理的重建網(wǎng)絡(luò)模型具有更強(qiáng)的泛化能力。因此,本文在頻域中構(gòu)建網(wǎng)絡(luò)對(duì)投影數(shù)據(jù)進(jìn)行濾波處理。
頻域處理網(wǎng)絡(luò)的詳細(xì)結(jié)構(gòu)如圖1(b)所示,最左端是Spa2Fre 層,中間是頻域編解碼網(wǎng)絡(luò)Fre-CNN,最右端是Fre2Spa 層。在Spa2Fre 層中對(duì)時(shí)域投影數(shù)據(jù)進(jìn)行傅里葉變換;在Fre2Spa 層中對(duì)頻域?yàn)V波后的投影數(shù)據(jù)進(jìn)行傅里葉反變換;由于基于編解碼結(jié)構(gòu)的CNN 具有較強(qiáng)的特征提取和信息表征能力,所以本文采用基于U-Net 的CNN來(lái)構(gòu)建頻域?yàn)V波網(wǎng)絡(luò)。如圖1(b)所示,頻域?yàn)V波編解碼網(wǎng)絡(luò)Fre-CNN深度為4,每一級(jí)由編碼子網(wǎng)絡(luò)與解碼子網(wǎng)絡(luò)組成。為避免深度網(wǎng)絡(luò)訓(xùn)練過(guò)程中梯度消失問(wèn)題,同級(jí)網(wǎng)絡(luò)之間通過(guò)跨層連接,將同級(jí)編碼端低維特征補(bǔ)充到解碼端高維特征。每一級(jí)的編碼子網(wǎng)絡(luò)和解碼子網(wǎng)絡(luò)都由相同的網(wǎng)絡(luò)結(jié)構(gòu)組成,該網(wǎng)絡(luò)結(jié)構(gòu)包含兩個(gè)連續(xù)的卷積層(Convolutional layer,Conv),在每次卷積操作后均有一個(gè)批規(guī)范化(Batch Normalization,BN)操作和一個(gè)線性修正單元(Rectified Linear Unit,ReLU)作為激活函數(shù)進(jìn)行激活。其中,卷積操作的卷積核大小為1×3。在編碼端,兩次連續(xù)卷積后進(jìn)行一次1×2 的池化操作,其步長(zhǎng)為1×2;在解碼端,兩次連續(xù)卷積之后進(jìn)行一次1×2 的上采樣(Up-Conv)操作,其步長(zhǎng)為1×2。投影域網(wǎng)絡(luò)卷積特征圖數(shù)量和數(shù)據(jù)大小如圖1(b)所示。投影域網(wǎng)絡(luò)計(jì)算式如下:

P
為投影數(shù)據(jù);F
和F
分別表示傅里葉正變換和傅里葉反變換;Net
表示該網(wǎng)絡(luò)的輸出;CNN
為投影數(shù)據(jù)在頻域中的濾波網(wǎng)絡(luò)。1.2 反投影層
在二維扇形束CT 重建過(guò)程中,在N
個(gè)投影角度下獲取投影數(shù)據(jù),每個(gè)角度下的投影數(shù)據(jù)長(zhǎng)度為N
,所有投影數(shù)據(jù)表示為p
。重建后的圖像為x
,其大小為N
×N
。于是,CT 重建問(wèn)題可以表述為求解以下線性方程:
A
是系統(tǒng)矩陣,其大小為NN
×NN
。CT 重建過(guò)程便是根據(jù)系統(tǒng)矩陣A
從投影數(shù)據(jù)p
中恢復(fù)出未知圖像x
。系統(tǒng)矩陣A
中的元素a
表示第i
條X 射線穿過(guò)模體在第j
號(hào)像素內(nèi)產(chǎn)生的貢獻(xiàn)。系統(tǒng)矩陣A
與圖像x
的乘積被稱為正投影,而系統(tǒng)矩陣的轉(zhuǎn)置A
與投影數(shù)據(jù)p
的乘積被稱為反投影。在實(shí)際應(yīng)用中,由于系統(tǒng)矩陣非常龐大,通常采用即時(shí)計(jì)算的方式計(jì)算正投影系統(tǒng)矩陣A
和反投影系統(tǒng)矩陣A
。CT 圖像重建過(guò)程可以表示為濾波后投影數(shù)據(jù)P
與反投影矩陣A
直接相乘的反投影過(guò)程。理論上說(shuō),該反投影過(guò)程可以使用全連接技術(shù)實(shí)現(xiàn)。由于實(shí)際CT 重建問(wèn)題中投影數(shù)據(jù)和重建圖像的尺寸較大,導(dǎo)致全連接層的網(wǎng)絡(luò)參數(shù)非常龐大,阻礙了該技術(shù)在常規(guī)電腦上的實(shí)現(xiàn)。為了解決該問(wèn)題,本文構(gòu)造了一個(gè)權(quán)重參數(shù)固定的反投影層,采取即時(shí)計(jì)算的方式計(jì)算反投影矩陣A
和正投影矩陣A
。反投影層的前向操作可以表示為:
x
來(lái)自于投影域網(wǎng)絡(luò)的輸出,x
表示該反投影層的輸出。網(wǎng)絡(luò)在訓(xùn)練過(guò)程中,誤差反向傳播通過(guò)反投影層可以表示為:
e
表示來(lái)自于圖像域網(wǎng)絡(luò)的反饋誤差,該反饋誤差經(jīng)過(guò)正投影操作得到誤差e
,反饋至投影域網(wǎng)絡(luò)。為了提升DDFre-Net 重建網(wǎng)絡(luò)的性能,正投影采用射線驅(qū)動(dòng)方法進(jìn)行計(jì)算,反向投影則采用像素驅(qū)動(dòng)方法進(jìn)行計(jì)算。反投影層可以表示為:
Net
為反投影層輸出;BP
(·)為反投影層;Net
為投影域網(wǎng)絡(luò)輸出。1.3 圖像域網(wǎng)絡(luò)
為了進(jìn)一步改善重建圖像視覺(jué)效果,在反投影層之后增加一個(gè)圖像域處理網(wǎng)絡(luò)Img-CNN。如圖1(c)所示,該網(wǎng)絡(luò)是一個(gè)U-Net 結(jié)構(gòu)的網(wǎng)絡(luò),包含一個(gè)編碼器子網(wǎng)絡(luò)(左半部分)和一個(gè)解碼器子網(wǎng)絡(luò)(右半部分)。編碼器子網(wǎng)絡(luò)和解碼器的深度設(shè)為4。在編碼端,每一級(jí)包含兩個(gè)連續(xù)的卷積塊和池化塊。每個(gè)卷積塊包含兩個(gè)卷積層,每個(gè)卷積層采用步長(zhǎng)為1 的3×3 卷積核進(jìn)行卷積,同時(shí)每個(gè)卷積層緊跟一個(gè)批規(guī)范化層及一個(gè)ReLU 非線性激活函數(shù)層。在連續(xù)兩個(gè)卷積塊后,有卷積核大小為3×3、步長(zhǎng)為2×2 的最大池化層進(jìn)行下采樣操作。池化層輸出的特征圖數(shù)量是輸入特征圖兩倍。在解碼端,輸入的特征圖先經(jīng)過(guò)Up-Conv 操作,通過(guò)插值操作使特征圖大小增大為原來(lái)的兩倍。在Up-Conv 操作中,輸出特征圖數(shù)量為輸入特征圖數(shù)量的1/2,同時(shí),Up-Conv 輸出的特征圖與對(duì)應(yīng)同一編碼端卷積輸出特征圖進(jìn)行級(jí)聯(lián)操作。每一級(jí)編碼端和解碼端采用跨層連接操作,解決深度神經(jīng)網(wǎng)絡(luò)梯度消失的問(wèn)題,并提高網(wǎng)絡(luò)訓(xùn)練的收斂速度。在Img-CNN最后,采用一個(gè)卷積核大小為1×1、步長(zhǎng)為1 的卷積層進(jìn)行網(wǎng)絡(luò)特征融合,輸出重建圖像。Img-CNN 每層卷積數(shù)量和每層圖像大小如圖1(c)所示。圖像域網(wǎng)絡(luò)可用下列計(jì)算式表示:

Net
為網(wǎng)絡(luò)輸出;CNN
為圖像域數(shù)據(jù)處理網(wǎng)絡(luò);Net
為反投影層的輸出。1.4 網(wǎng)絡(luò)損失函數(shù)
本文采用像素級(jí)損失函數(shù)和結(jié)構(gòu)相似性損失函數(shù)共同對(duì)重建網(wǎng)絡(luò)進(jìn)行約束。本文所使用的像素級(jí)損失函數(shù)為最小均方誤差(Mean Square Error,MSE),如式(7)所示:

x
是重建圖像,x
則是參考圖像。但MSE 損失通常會(huì)導(dǎo)致網(wǎng)絡(luò)收斂于訓(xùn)練數(shù)據(jù)的均值,導(dǎo)致重建后圖像存在平滑模糊、缺少細(xì)節(jié)和紋理特征的現(xiàn)象。故本文采用MSE 損失函數(shù)和多尺度結(jié)構(gòu)相似度(Multi Scale Structural Similarity,MS-SSIM)損失函數(shù)(如式(9)所示)共同作為重建網(wǎng)絡(luò)損失函數(shù),進(jìn)一步地保持重建圖像細(xì)節(jié)。MSE 損失和MS-SSIM 損失函數(shù)公式如下:



2 實(shí)驗(yàn)設(shè)置
2.1 數(shù)據(jù)集
本文采用“2016 NIH-AAPM-Mayo Clinic 低劑量挑戰(zhàn)賽”所提供的公開(kāi)數(shù)據(jù)集,該數(shù)據(jù)集包含了20 例不同病人的胸部正常計(jì)量的CT 數(shù)據(jù),共3 570 張CT 重建圖像。由于該臨床數(shù)據(jù)集采用螺旋軌跡掃描方式獲取,因而原始投影數(shù)據(jù)不能直接被用于扇形束CT 重建。在本文實(shí)驗(yàn)中,在一定掃描參數(shù)下通過(guò)正投影算法重新獲取投影數(shù)據(jù),分別產(chǎn)生了投影角度數(shù)目為90、180 和360 的投影數(shù)據(jù)。生成投影數(shù)據(jù)的探測(cè)器數(shù)量是768,采樣間隔是1 mm;重建圖像尺寸為512×512,采樣間隔為0.585 9 mm×0.585 9 mm;射線源到探測(cè)器中心距離為1 068.0 mm;射線源到旋轉(zhuǎn)中心距離為595.0 mm。19 個(gè)病例的數(shù)據(jù)用于重建網(wǎng)絡(luò)的訓(xùn)練,剩余1 個(gè)病例的194 個(gè)投影數(shù)據(jù)用于重建算法的測(cè)試。
為了進(jìn)一步地驗(yàn)證本文算法的減少重建圖像偽影和抑制重建圖像噪聲的能力,通過(guò)在投影中加入電子噪聲和泊松分布的噪聲來(lái)生成帶噪聲的數(shù)據(jù)集,從而模擬真實(shí)的投影數(shù)據(jù):


2.2 實(shí)驗(yàn)環(huán)境
本文算法采用深度學(xué)習(xí)Pytorch 框架進(jìn)行構(gòu)建,采取Adam 優(yōu)化算法作為重建網(wǎng)絡(luò)訓(xùn)練的優(yōu)化算法,初始學(xué)習(xí)率設(shè)置為10,批量大小設(shè)置為1,每訓(xùn)練1 000 次保存一個(gè)模型。選取的對(duì)比算法為FBP、TV 和RED-CNN 三種。FBP 算法采用Ram-Lak 濾波器對(duì)投影數(shù)據(jù)進(jìn)行濾波,并使用本文算法中的反投影層對(duì)濾波后的投影數(shù)據(jù)進(jìn)行反投影操作,得到重建后的圖像。TV 算法則是采用TRIGER工具箱自帶的自適應(yīng)步長(zhǎng)的全變差最小(Adaptive Steepest Decent Projection Onto Convex Sets,ASD-POCS)算法進(jìn)行CT 重建,其中迭代次數(shù)設(shè)置為40。在PyTorch 框架下對(duì)RED-CNN 算法進(jìn)行復(fù)現(xiàn),網(wǎng)絡(luò)訓(xùn)練參數(shù)設(shè)置與文獻(xiàn)[35]一致。
本文算法和對(duì)比算法均在同一臺(tái)工作站上進(jìn)行實(shí)驗(yàn),該工作站硬件參數(shù)配置如下:CPU 型號(hào)為Intel Core i7-9700k 3.6 GHz,內(nèi)存64 GB,GPU:NVIDIA RTX 3090 24 GB。該工作站的操作系統(tǒng)為Ubuntu20.04 LTS。
2.3 評(píng)價(jià)指標(biāo)
本文分別采用峰值信噪比(Peak Signal to Noise Ratio,PSNR)、結(jié)構(gòu)相似性(SSIM)和歸一化均方誤差(Normalized MSE,NMSE)這三個(gè)指標(biāo)對(duì)重建結(jié)果進(jìn)行評(píng)價(jià)。SSIM 公式為式(8),PSNR 和NMSE 的計(jì)算公式如下:

n
為圖像像素的比特?cái)?shù),一般取8 或16;x
是重建圖像,而x
則是參考圖像;μ
代表圖像均值;PSNR 的單位是dB,數(shù)值越大表示圖像失真越小;SSIM 值位于(0,1),該值越接近1表示重建圖像質(zhì)量越好;NMSE 衡量結(jié)果圖像和參考圖像之間的差異,NMSE 值越低表示重建圖像質(zhì)量越高。3 不帶噪聲數(shù)據(jù)實(shí)驗(yàn)與結(jié)果分析
為了驗(yàn)證本文算法的有效性,分別選取了同一病例三個(gè)不同部位的投影數(shù)據(jù)作為各算法的輸入,投影數(shù)目分別為360、180 和90 個(gè)。在重建結(jié)果展示中,重建部位一和重建部位二圖像的視窗均為[-900,2 100]HU,重建部位三圖像的視窗[-360,440]HU。在重建結(jié)果殘差圖像中,各圖像的視窗為[-512,512]HU。最后,給出了不同算法在同一病例測(cè)試集上整體評(píng)價(jià)指標(biāo)和各個(gè)算法的計(jì)算時(shí)間。
3.1 360個(gè)投影數(shù)目的重建結(jié)果分析
圖2 為不同算法對(duì)同一病例的三個(gè)不同組織部位的CT重建圖像結(jié)果對(duì)比。在各重建圖像的正下方為該重建圖像PSNR 和SSIM 的數(shù)值指標(biāo),左下角是感興趣區(qū)域(圖2(a)中白色矩形位置)的放大圖像。

圖2 不同算法在投影數(shù)目為360時(shí)的重建結(jié)果對(duì)比Fig.2 Comparison of reconstruction results under 360 projections by different algorithms
圖3 為不同重建算法重建所得圖像與參考圖像的殘差圖像。各個(gè)殘差圖像的下方為計(jì)算的NMSE 指標(biāo)數(shù)值。綜合圖2 和圖3 可得,采用FBP 算法進(jìn)行重建,重建結(jié)果的噪聲和偽影較為明顯,重建圖像視覺(jué)效果欠佳;TV 算法能很好地保留圖像的細(xì)節(jié)信息,在抑制噪聲和保留圖像的結(jié)構(gòu)信息方面表現(xiàn)良好;RED-CNN 算法雖然計(jì)算的PSNR 指標(biāo)較高且能夠在一定程度上抑制噪聲并消除偽影,但是所得的圖像細(xì)節(jié)較為模糊;本文算法可以有效地抑制噪聲、去除偽影和保留紋理等細(xì)節(jié),在視覺(jué)效果方面優(yōu)于對(duì)比算法。雖然TV 算法計(jì)算所得重建圖像的評(píng)價(jià)指標(biāo)略高于本文算法,但是二者在圖像視覺(jué)效果方面并無(wú)太大差異。
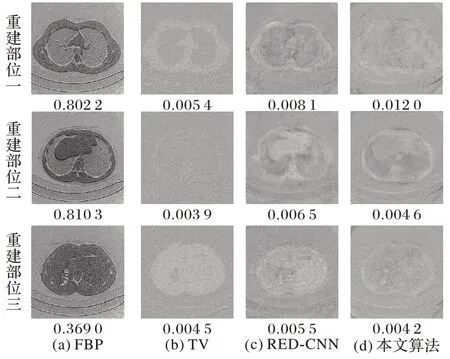
圖3 不同算法在投影數(shù)目為360時(shí)的重建結(jié)果殘差圖Fig.3 Difference images of reconstruction result under 360 projections by different algorithms
3.2 1 80個(gè)投影數(shù)目的重建結(jié)果分析
隨著投影角度數(shù)量的減少,不同重建算法計(jì)算所得重建圖像的評(píng)價(jià)指標(biāo)PSNR、SSIM 和視覺(jué)效果均會(huì)有所下降。圖4 是本文算法和對(duì)比算法在180 個(gè)投影數(shù)目下的重建結(jié)果圖,相應(yīng)的重建結(jié)果殘差圖如圖5 所示。

圖4 不同算法在投影數(shù)目為180時(shí)的重建結(jié)果對(duì)比Fig.4 Comparison of reconstruction results under 180 projections by different algorithms
從圖4 和圖5 可以觀察到,傳統(tǒng)的FBP 算法明顯增加了重建圖像的噪聲和偽影,無(wú)法很好地獲得重建信息。TV 算法雖然可以有效地減少重建后圖像中的噪聲和偽影,但是仍然模糊了圖像的細(xì)節(jié),且重建后圖像中存在一些條狀偽影。RED-CNN 算法嚴(yán)重地平滑了重建后圖像的細(xì)節(jié)。相較于TV 算法所得結(jié)果,RED-CNN 方法重建所得圖像雖然PSNR數(shù)值較高,但是由于該方法嚴(yán)重地平滑了所得圖像的細(xì)節(jié),因此視覺(jué)效果較差。相較于對(duì)比算法,本文算法有效地保留了重建圖像的結(jié)構(gòu)和紋理等細(xì)節(jié)信息,且圖像質(zhì)量評(píng)價(jià)指標(biāo)和視覺(jué)效果比對(duì)比算法高。
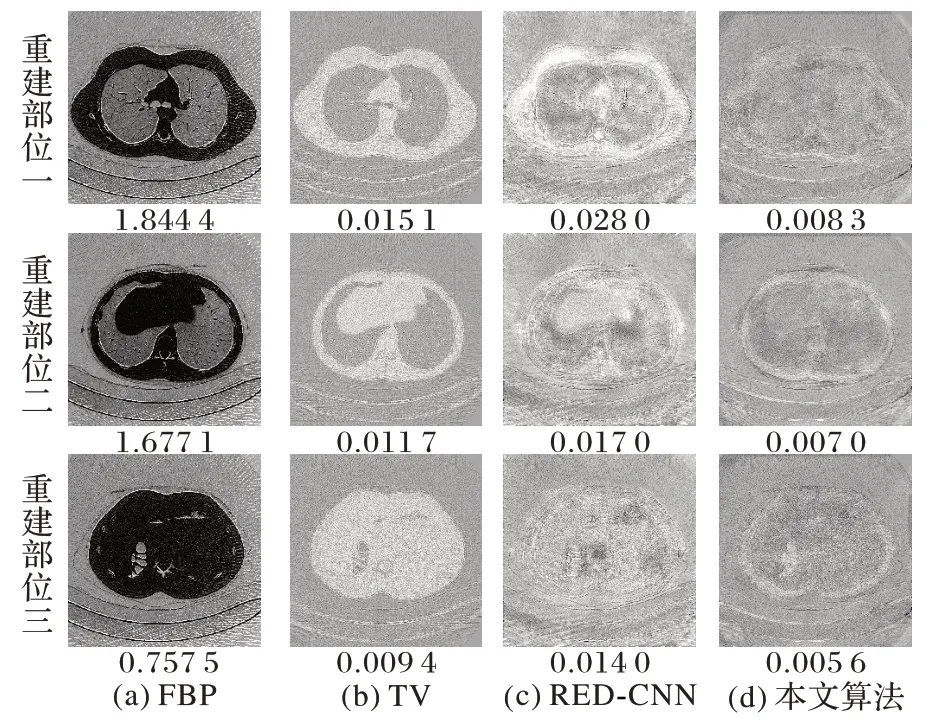
圖5 不同算法在投影數(shù)目為180時(shí)的重建結(jié)果殘差圖Fig.5 Difference images of reconstruction result under 180 projection by different algorithms
3.3 90個(gè)投影數(shù)目的重建結(jié)果分析
隨著投影數(shù)據(jù)角度數(shù)量的進(jìn)一步減少,不同重建算法所得重建圖像的質(zhì)量均有明顯的下降。圖6是90個(gè)投影數(shù)目下4種算法的重建圖像,相應(yīng)的重建結(jié)果殘差圖如圖7所示。
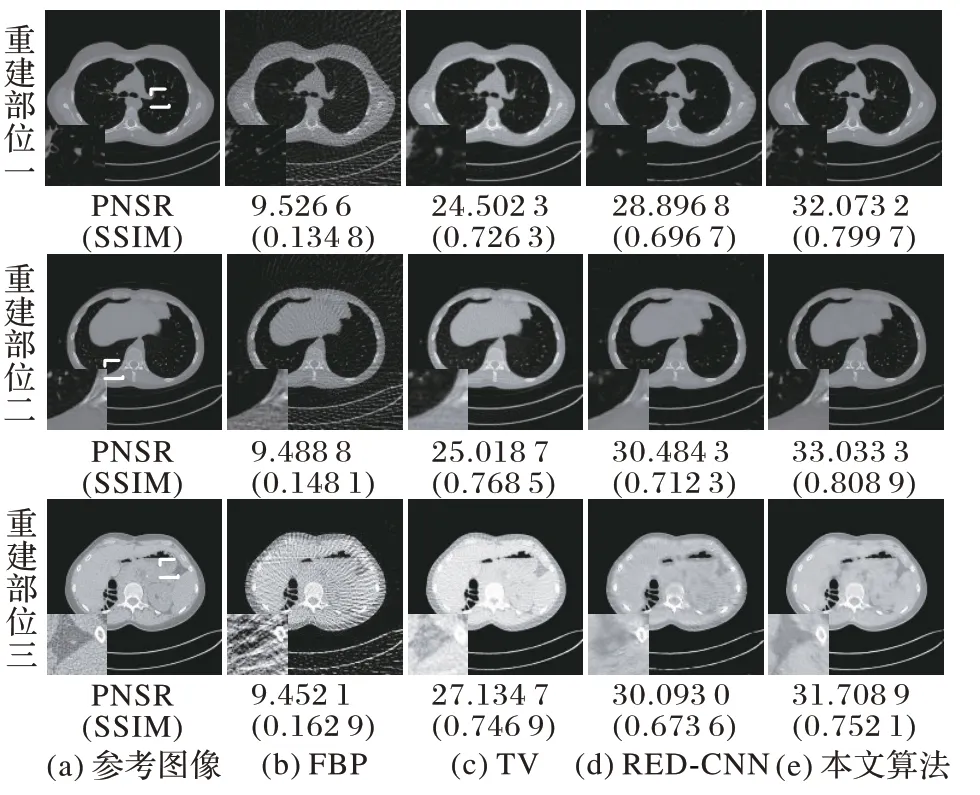
圖6 不同算法在投影數(shù)目為90時(shí)的重建結(jié)果對(duì)比Fig.6 Comparison of reconstruction results under 90 projections by different algorithms

圖7 不同算法在投影數(shù)目為90時(shí)的重建結(jié)果殘差圖Fig.7 Difference images of reconstruction result under 90 projection by different algorithms
從圖6 中不難發(fā)現(xiàn),三種對(duì)比算法計(jì)算所得重建圖像均丟失了圖像的結(jié)構(gòu)特征,存在較為嚴(yán)重的條紋偽影和噪聲。本文提出的算法雖然也會(huì)模糊圖像,并導(dǎo)致圖像丟失結(jié)構(gòu)細(xì)節(jié),但是與三種對(duì)比算法相比,本文算法可以更好地保留圖像結(jié)構(gòu)信息并在指標(biāo)PSNR、SSIM、NMSE上獲得更好數(shù)值。
3.4 重建測(cè)試集指標(biāo)以及重建時(shí)間分析
表1 是對(duì)比算法和本文算法在測(cè)試集上單張圖像的重建時(shí)間對(duì)比。從表1 重建時(shí)間對(duì)比中可以看出,F(xiàn)BP 算法計(jì)算速度最快,TV 算法計(jì)算耗時(shí)最長(zhǎng),本文所提DDFre-Net 算法計(jì)算時(shí)間介于RED-CNN 算法與FBP 算法之間。
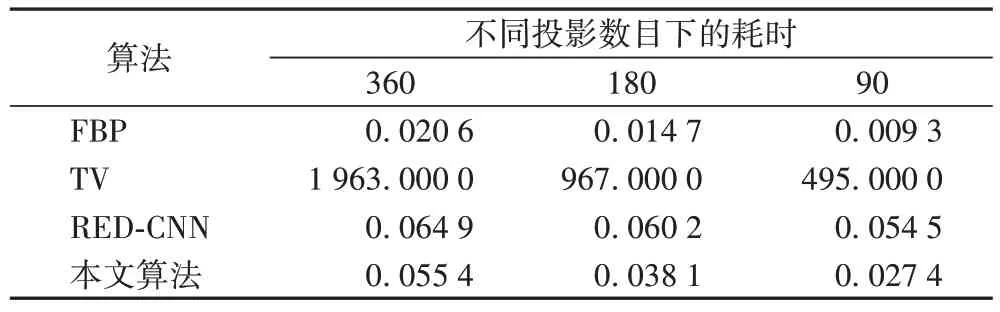
表1 不同算法單張圖像重建耗時(shí) 單位:sTab 1 Reconstruction of time single image by different algorithms unit:s
表2是對(duì)比算法和本文算法在測(cè)試集上的PSNR、SSIM和NMSE 三個(gè)指標(biāo)。從表2 可以看出,本文所提出DDFre-Net 算法在投影角度數(shù)目為360 時(shí)測(cè)試集上指標(biāo)略低于TV 算法,但在投影角度數(shù)目為180 和90 時(shí),在測(cè)試集上各指標(biāo)均要優(yōu)于FBP、TV 和RED-CNN 三種算法。綜上可知,本文算法在保證重建圖像質(zhì)量較好的前提下,計(jì)算速度快。
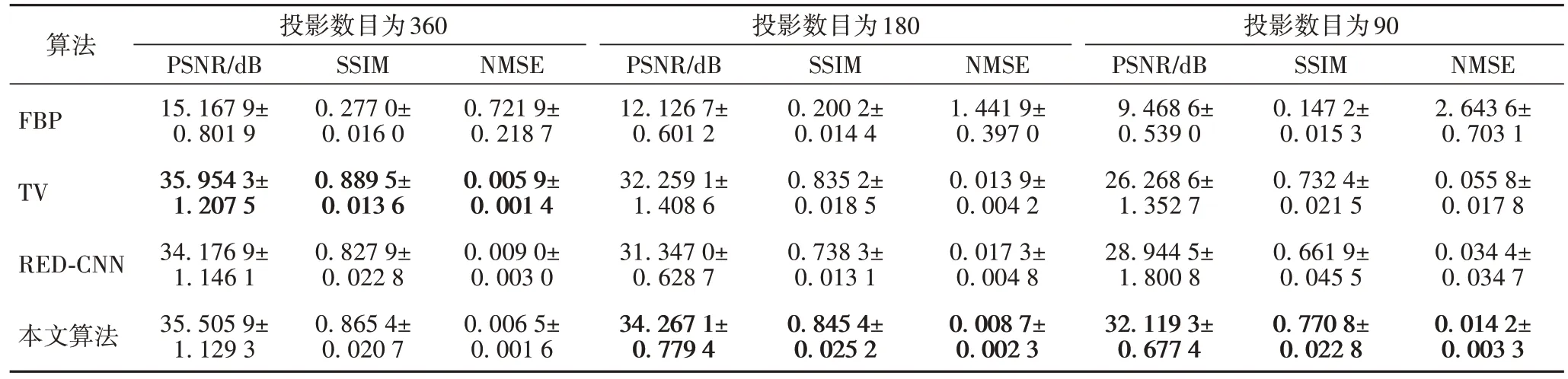
表2 不同算法測(cè)試集上指標(biāo)對(duì)比Tab 2 Index comparison of different comparison algorithms under different projections
3.5 網(wǎng)絡(luò)訓(xùn)練損失函數(shù)曲線
圖8 是本文DDFre-Net 算法在不同投影角度數(shù)量下的網(wǎng)絡(luò)訓(xùn)練損失。從圖8 中可以觀察到,隨著網(wǎng)絡(luò)訓(xùn)練次數(shù)的增加,網(wǎng)絡(luò)的損失逐漸減小,從而說(shuō)明該網(wǎng)絡(luò)是收斂的。

圖8 DDFre-Net訓(xùn)練損失Fig.8 DFre-Net training loss
4 帶噪聲數(shù)據(jù)實(shí)驗(yàn)與結(jié)果分析
為了進(jìn)一步驗(yàn)證算法的魯棒性,在帶噪聲的投影數(shù)據(jù)上進(jìn)行CT 重建。圖9 分別 為FBP 算法、TV 算法、RED-CNN 算法和本文算法的重建結(jié)果,所得圖像與參考圖像的殘差圖如圖10 所示。
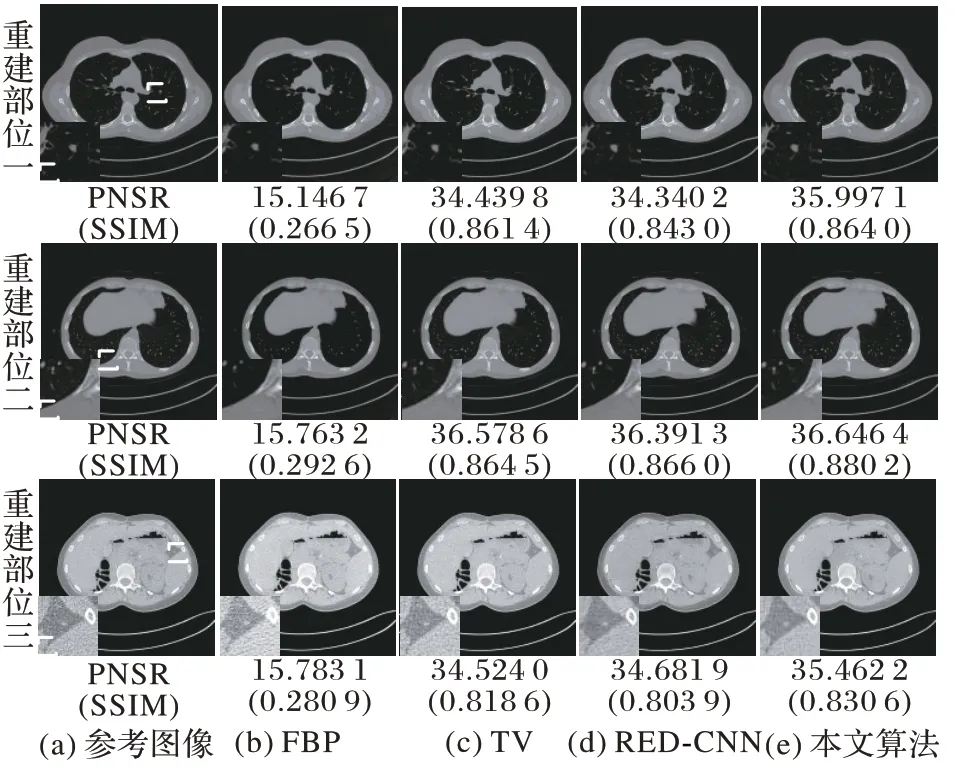
圖9 不同算法在投影數(shù)目為360時(shí)的噪聲數(shù)據(jù)集重建結(jié)果對(duì)比Fig.9 Comparison of reconstruction results under 360 projections on noisy dataset by different algorithms
從圖10 可以看出,與FBP 算法相比,本文算法有效地抑制了重建后圖像中條狀偽影的產(chǎn)生;與TV算法相比,本文算法進(jìn)一步抑制了重建后圖像中的噪聲分布;與RED-CNN算法相比,本文算法很好地保留了重建后圖像中的紋理信息。

圖10 不同算法在投影數(shù)目為360時(shí)的噪聲數(shù)據(jù)集重建結(jié)果殘差圖Fig.10 Difference images of reconstruction results under 360 projection on noisy dataset by different algorithms
表3 為本文算法與對(duì)比算法在360 個(gè)投影角度下帶噪聲測(cè)試數(shù)據(jù)集上的總體表現(xiàn)。從表3 中可以觀察到,本文算法的總體評(píng)價(jià)指標(biāo)均要優(yōu)于對(duì)比算法,從而表明本文算法在帶噪聲的數(shù)據(jù)集上也有很好的表現(xiàn)。
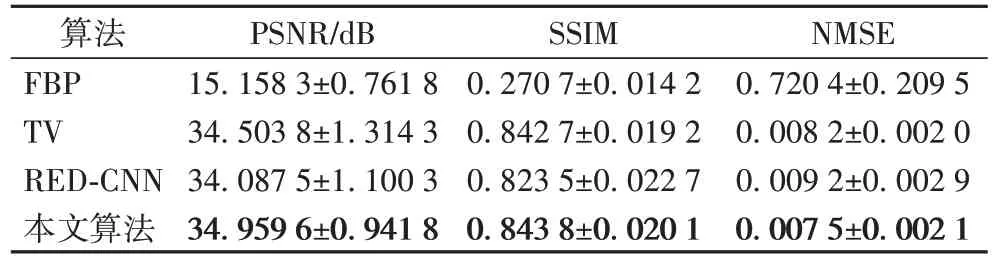
表3 不同算法在360個(gè)投影數(shù)目下噪聲數(shù)據(jù)集指標(biāo)對(duì)比Tab 3 Index comparison by different algorithms under 360 projections on noisy datasets
5 結(jié)語(yǔ)
針對(duì)采用傳統(tǒng)濾波器進(jìn)行CT 圖像重建,重建后圖像存在偽影和圖像細(xì)節(jié)丟失的問(wèn)題,本文設(shè)計(jì)了一個(gè)端到端的雙域CT 重建DDFre-Net,在頻域中采用CNN 對(duì)投影數(shù)據(jù)進(jìn)行濾波,有效地改善了CT 重建圖像的質(zhì)量。為了驗(yàn)證所提算法的有效性,分別在不帶噪聲數(shù)據(jù)集和帶噪聲數(shù)據(jù)集上,將本文算法與FBP、TV 和RED-CNN 算法進(jìn)行了比較。實(shí)驗(yàn)結(jié)果表明,在不帶噪聲數(shù)據(jù)集上,所提算法在投影數(shù)目分別為180 和90 的情況下重建圖像質(zhì)量高,重建速度快;在帶噪聲數(shù)據(jù)及下,所提算法在投影數(shù)目為360 的情況下效果最佳。同時(shí)DDFre-Net 簡(jiǎn)單,無(wú)需人為設(shè)置復(fù)雜的超參數(shù),故在實(shí)際應(yīng)用中極易實(shí)現(xiàn)。不足之處是DDFre-Net 雖然采用U-Net 的結(jié)構(gòu)減少了參數(shù),但是所需參數(shù)仍然較為龐大,可以通過(guò)減少U-Net 編解碼層的數(shù)量進(jìn)行優(yōu)化。本文算法針對(duì)的是二維扇形束CT 圖像重建情形,因?yàn)槎S扇形束CT 重建是三維錐束CT 重建的一個(gè)特例,所以下一步工作將嘗試將本文算法向三維錐束適配。