吉利EV450的CAN總線故障診斷思路 與案例分析
2022-05-10 09:19:04寧小剛張超東
汽車實用技術 2022年8期
寧小剛,吳 沖,張超東
(甘肅機電職業技術學院 車輛工程學院,甘肅 天水 741001)
隨著汽車電子技術的不斷發展,車輛電子化程度越來越高,其電控單元數量呈指數增長,而電控單元數量的增長帶來各不同電控單元之間交互的數據量的俱增,因此,各不同電控單元之間的線控連接及布線工作也越來越復雜。無論從布線成本、電氣輕量化、線束連接,還是從大數據實時處理方面來說,傳統的汽車通信方式已無法滿足汽車通信網絡的發展。控制器局域網絡(Controller Area Network, CAN)總線技術的應用,可以實現各電控單元之間的信息交流,解決此類問題,并推動汽車工業的進一步發展。
盡管CAN總線技術在汽車網絡通訊方面已漸趨成熟,但對于新能源汽車領域CAN總線通訊系統的維修研究較少。由于CAN總線類型因各個廠家而異,且不同款車的故障診斷思路也不同,這就對汽車維修人員維修技術的提出了更高的要求。基于此,針對汽車CAN線的故障排除研究越來越重要,本文以吉利EV450的CAN總線為例,對CAN總線故障排除思路和方法進行研究分析,并可應用于實際的維修診斷過程中,為汽車技術人員提供一定參考。
1 CAN總線優勢
CAN是一種串行通信協議,專為可靠高速數據通信而定。汽車CAN總線最初是由德國BOSCH為汽車內部數據交換而開發的總線束系統,隨著科學技術水平的不斷提高,其功能越來越強大。
早期,在CAN總線還未出現之時,汽車電控單元采用點對點的方式進行數據間的交互。點對點連接有以下主要問題:(1)模塊節點之間硬線連接、專線專用,線束數量增加。(2)線束的增加造成了維修難度的提升。(3)線束成本的增加提高了造車成本。(4)線束重量的增加難以實現電氣輕量化。(5)布線冗雜混亂且布線工作繁重。(6)點對點的網絡拓撲結構不便于進行網絡的擴展。點對點的連接方式如圖1所示。
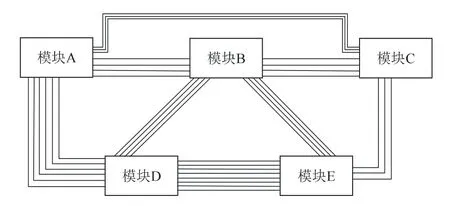
圖1 點對點連接示意圖
CAN總線與點對點連接方式不同,其節點與節點之間的數據交互采用共享機制。即通過一條總線進行傳輸,所有需要參與通訊的節點是以支線的形式掛接在總線上。其連接方式如圖2所示,得知連接線束減少。CAN總線的優勢有以下幾點:(1)模塊之間的數據交互以總線的形式進行。(2)傳遞數據速度快,實時工作性強:高速CAN最高支持1 MB/s,低速CAN最高支持120 KB/s。(3)能夠無損仲裁,信號傳遞具有優先級,優先級高的信號發送時不會干擾和破壞優先級低的信號。(4)因具有雙絞線的物理結構,采用差分信號和二進制的電頻信號,其抗干擾能力強。(5)線束減少導致布線、維修難度、線束重量和生產成本降低。(6)總線拓撲結構具有良好的可擴展性。(7)擴展出支線車載自動診斷系統(On Board Diagnos- tics, OBD)接口,能夠通過測量分析判斷總線上各個模塊之間數據交互是否正常。
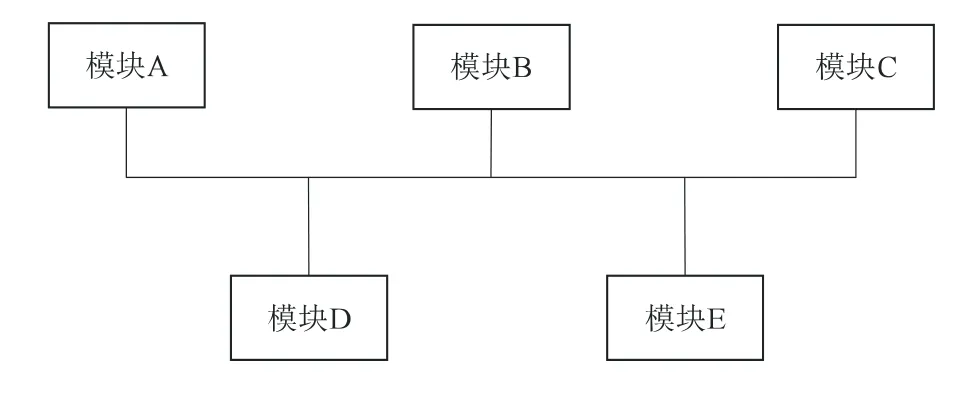
圖2 CAN總線連接示意圖
2 CAN總線故障診斷及排除方法
2.1 CAN總線的常見故障
CAN總線系統一般由CAN控制器、信息收發器、兩個數據傳輸終端及兩條數據傳輸總線組成,除了數據總線外,其他各元件都置于各控制單元的內部。因此,CAN總線系統常見故障如表1所示。
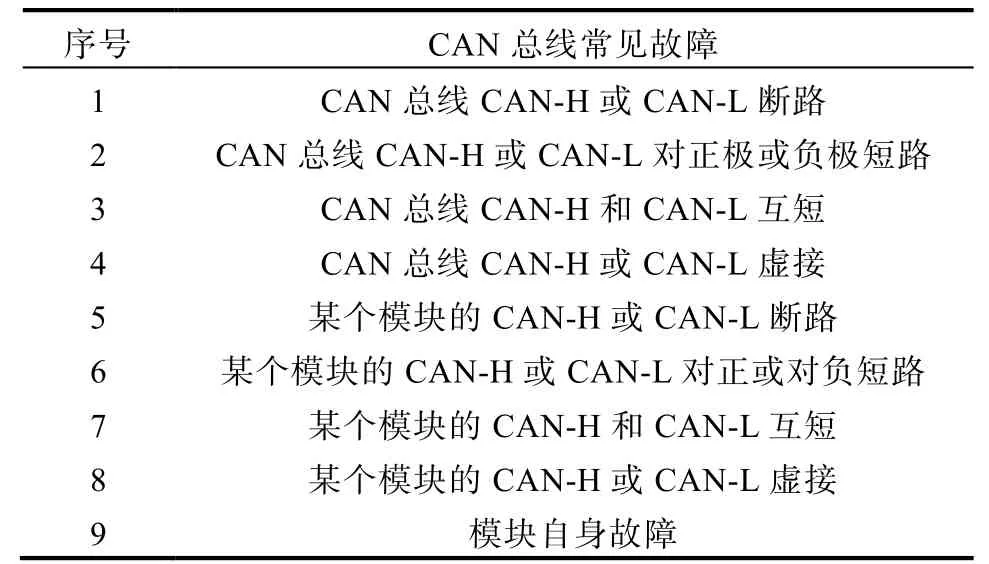
表1 CAN總線系統的常見故障
2.2 CAN總線的故障分析
CAN總線是將所有節點通過CAN-H和CAN- L連接在一起,實現信息通道共享的一種總線通訊方式。其連接示意圖如圖3所示。
由圖3得知,CAN總線兩端有兩個并聯連接的終端電阻,其阻值為120 Ω。因此,CAN總線線路正常時,從模塊A、B、C、D、E分別測得的CAN-H和CAN-L之間的電阻值為60 Ω,從模塊M、N分別測得的CAN-H和CAN-L之間的電阻 值為120 Ω。

圖3 CAN總線連接示意圖
當模塊A的CAN-H或CAN-L線路斷路時,在診斷接口處測得的CAN-H與CAN-L之間的電阻值為60 Ω。在插接器a處測得的CAN-H與CAN-L之間的電阻值為∞。同理,支線模塊B、C、D、E的CAN-H或CAN-L線路斷路時,診斷接口處測得的CAN-H與CAN-L之間的電阻值為60 Ω,與此對應在插接器b、c、d、e處測得的CAN-H與CAN-L之間的電阻值為∞。
當模塊A的CAN-H或CAN-L對正或對負短路時,其對診斷接口處測得的CAN-H與CAN-L之間的電阻值影響不大,很難判斷是否故障,可先通過測量模塊CAN-H或CAN-L的電壓來判斷模塊是否存在短路故障,對負極短路時CAN-H和CAN-L電壓都接近于0 V,對正極短路時CAN-H和CAN-L電壓都接近于常電。再通過測得插接器a處CAN-H或CAN-L對蓄電池負極或正極的電阻值(<1 Ω)判斷CAN-H或CAN-L的其中一個對正極或對負極短路。模塊B、模塊C、模塊D、模塊E等通過相同方式得出故障結論。
當CAN總線的CAN-H與CAN-L或模塊A、B、C、D、E的CAN-H與CAN-L互相短路時,相當于在并聯電路中加一根0 Ω的導線,此時診斷接口處測得的CAN-H與CAN-L之間的電阻<1 Ω。
當總線CAN-H或CAN-L對正極或負極短路時,其對診斷接口處測得的CAN-H與CAN-L之間的電阻值影響不大,很難判斷是否故障,先測量插接器x處或插接器y處的CAN-H與CAN-L之間的電阻值為120 Ω,再測量插接器x處或插接器y處CAN-H或CAN-L對蓄電池正極或負極的電阻值(故障時電阻值<1 Ω),判斷CAN-H或CAN-L的其中一個對正極或對負極短路。
當CAN總線CAN-H或CAN-L在1-1處斷路時,診斷接口處測得的CAN-H與CAN-L之間的電阻值為120 Ω,在x處測得上游電阻為∞,下游電阻為120 Ω(以插接器x為中心線,左側為上游,右側為下游),在插接器y處測得上游電阻為120 Ω。
當CAN總線或某個模塊的CAN-H或CAN-L虛接時,可以用試燈進行測量。在測量CAN-H或CAN-L其中一個時,試燈會出現頻率很快的微微閃爍后較長時間不亮的現象。
3 EV450的CAN總線
吉利EV450在電路中用到了兩種CAN總線,分別為車身舒適CAN數據總線(VCAN)和動力驅動CAN數據總線(PCAN)。VCAN和PCAN總線通訊系統如圖4和圖5所示。其中,VCAN總線上的模塊有:電子駐車(Electrical Parking Brake, EPB)、安全氣囊控制單元(Airbag Control Unit, ACU)、方向盤轉角傳感器、電子助力轉向(Electric Power Steering, EPS)、車聯網終端(Telematics BOX, T-BOX)、車身控制模塊(Body Control Module, BCM)、組合儀表、音響主機、車載自動診斷系統(On-Board Diagnostics, OBD)、電子轉向管柱鎖、自動空調控制面板、全景影像模塊、座椅模塊、全球定位系統(Global Positioning System, GPS)主機、低速報警、電子穩定控制系統(Electronic Stability Control, ESC)、整車控制器(Vehicle Control Unit, VCU)等。
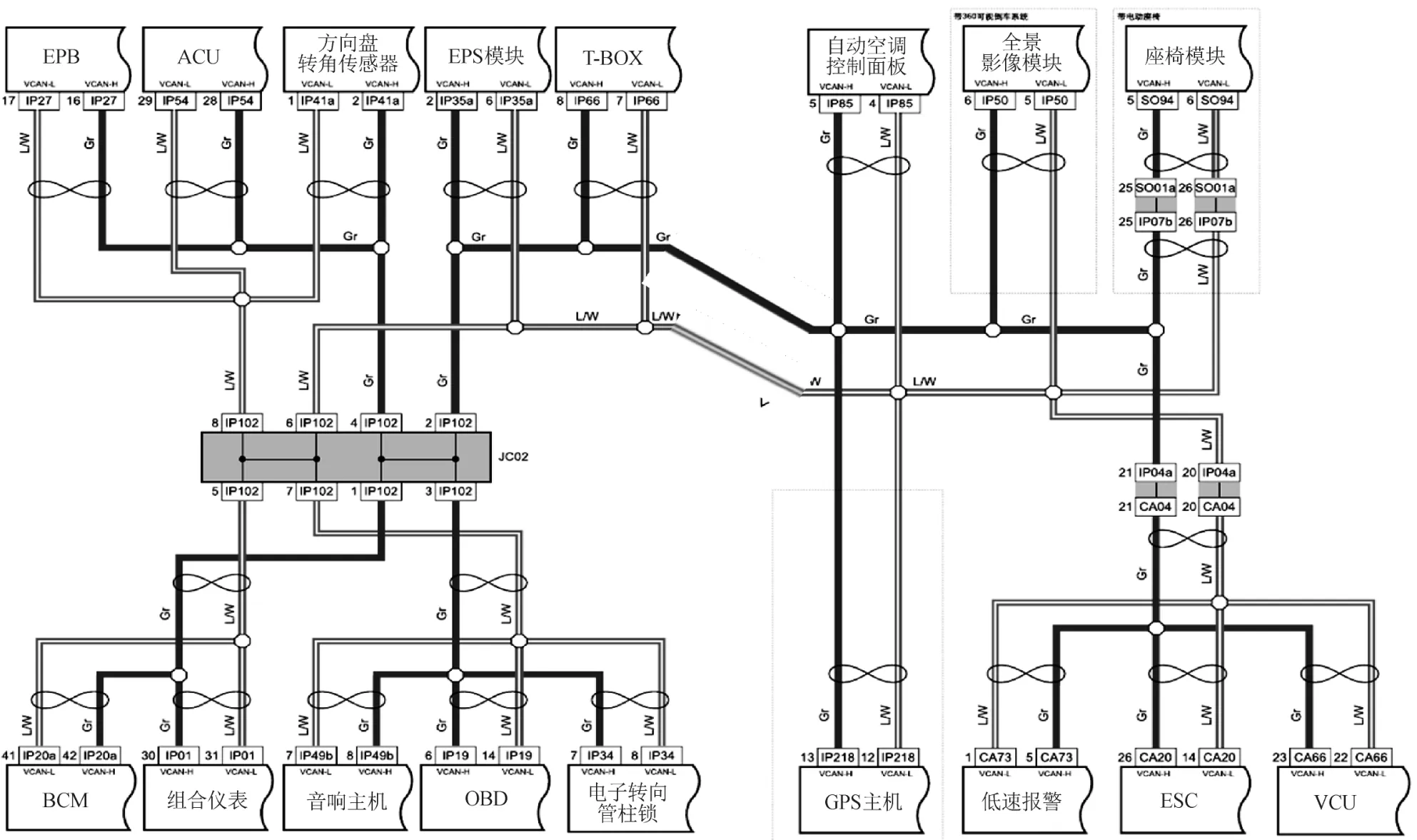
圖4 VCAN總線通訊系統
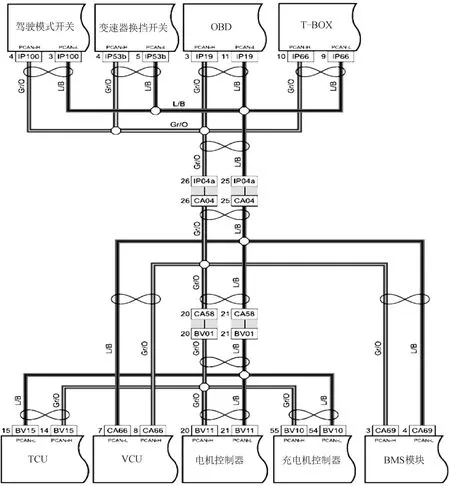
圖5 PCAN總線通訊系統
PCAN總線上的模塊有:駕駛模擬開關、變速器換擋開關、OBD、T-BOX、自動變速箱控制單元(Transmission Control Unit, TCU)、VCU、電 池管理系統(Battery Management System, BMS)、PEU總成(Power Electronic Unit, PEU)和PTC加熱器(Positive Temperature Coefficient, PTC)等。其中PEU是將電機控制器(Motor Control Unit, MCU)、車載充電機(On-Board Charger, OBC)、DC-DC轉換器(Direct Current-Direct Current Converter, DC-DC)和電源分配單元(Power Distribution Unit, PDU)進行系統集成的總成,俗稱“四合一”。
通過圖4、圖5得出結論:VCAN總線主要負責整車軟件和硬件的工作數據交互,PCAN總線主要負責汽車的動力、動力傳輸等軟硬件的數據交互。
4 EV450的CAN總線故障診斷案例
4.1 故障案例1
4.1.1 故障現象
儀表盤上電池管理系統故障指示燈,動力系統故障指示燈,充電系統故障指示燈亮起,系統故障指示燈,電子駐車故障指示燈,系統故障指示燈,傳動系統故障指示燈,側滑故障指示燈亮起。
4.1.2 故障碼
道通MS908E的故障診斷儀顯示的故障碼,如表2所示。
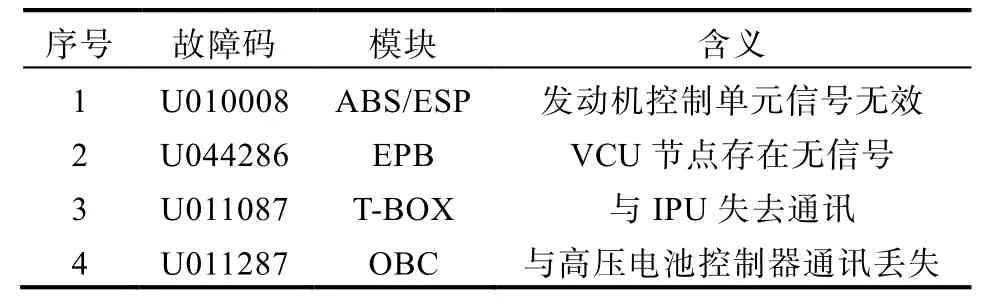
表2 故障診斷儀顯示的故障碼
4.1.3 故障分析
故障診斷儀里面有模塊丟失,正常使用時,此故障診斷儀模塊有17個,現在有14個,經查詢丟失的模塊有:PEU模塊、VCU模塊、BMS模塊。因此,故障可能是這些模塊的線路故障。因為讀取的故障碼大多數為VCU模塊引發的故障,所以故障可以暫時認為:(1)VCU模塊與VCAN總線的連接線束故障。(2)VCU模塊與PCAN總線的線路故障。如果(1)(2)線路正常,故障可能是:(3)PEU模塊與VCAN總線的連接線束故障。(4)PEU模塊與PCAN總線的線路故障。如果(3)(4)線路正常,故障可能是:BMS模塊與VCAN總線的連接線束故障;BMS模塊與PCAN總線的線路故障。
4.1.4 故障測試
故障測試步驟如下:(1)測量BV11的20號端子至BV11的21號端子之間的電阻,其值為107 Ω,證明PEU與PCAN總線線路連接正常。(2)測量CA66的22號端子至CA66的23號端子之間的電阻,其值為56 Ω,VCU與VCAN總線線路連接正常。(3)測量CA66的7號端子至CA66的8號端子之間的電阻異常,其值為∞,VCU與PCAN總線連接異常。(4)拔掉CA66插接器和CA04插接器,測量CA66的8號端子至CA04的26號端子之間的電阻異常,其值為∞(正常值為<1 Ω)。
4.1.5 故障確認
判斷此故障是VCU模塊的PCAN-H斷路。
4.2 故障案例2
4.2.1 故障現象
故障現象如下:(1)儀表盤上電池管理控制系統故障指示燈,動力系統故障指示燈,充電系統故障指示燈亮起。(2)車輛無法進行制冷、制熱等操作。
4.2.2 故障碼
無故障碼顯示或解碼儀只顯示8個模塊。
4.2.3 故障分析
從故障診斷儀可以推斷是一個模塊的短路故障或者CAN總線短路故障。有如下可能:(1)PCAN總線PCAN-H或PCAN-L對負極短路或對正極短路。(2)PCAN總線PCAN-H和PCAN-L兩個互短。(3)VCAN總線VCAN-H或VCAN-L對負極短路或對正極短路。(4)VCAN總線VCAN-H和VCAN-L兩個互短。(5)某個模塊的CAN-H或CAN-L對負極短路或對正極短路。(6)某個模塊的CAN-H和CAN-L兩個互短。(7)某個模塊自身故障。
4.2.4 故障測試
(1)測量IP19插接器(診斷接口)的3號端子至IP19的11號端子之間的電阻正常,其值為57 Ω,PCAN總線正常,且PCAN總線上連接模塊的CAN-H和CAN-L線路不存在互相短路故障。
(2)測量IP19的6號端子至IP19的14號端子之間的電阻正常,其值為56 Ω。證明VCAN總線正常,且VCAN總線上連接模塊的CAN-H和CAN-L線路不存在互相短路故障。因此,可以初步確定此故障是某個模塊的CAN-H或CAN-L對正極或對負極短路。
由于診斷儀讀不出故障碼,可以通過拔模塊插接器的方式來觀察診斷儀的顯示變化縮小故障范圍。步驟如下:(1)拔掉PEU的插接器(BV11),觀察診斷儀故障碼,故障碼沒有變化,模塊數量也無變化,所以不是PEU的故障。(2)拔掉VCU的插接器(CA66和CA67),觀察故障診斷儀,模塊還是8個,但是8個模塊都報了故障碼,經觀察發現故障都是與VCU連接異常的故障,所以車輛故障不是VCU線路故障造成的。(3)拔掉OBC插接器(BV10),觀察故障診斷儀,發現診斷儀有15個模塊,證明OBC模塊存在短路故障。(4)測量BV10的55號端子和54號端子,結果電壓異常,電壓值均<1 V,(CAN-H正常值為2.5 V~3.5 V;CAN-L正常值為1.5 V~2.5 V)。(5)分別測量BV10的55號端子和54號端子對搭鐵的電阻,其中,BV10的55號端子與車身搭鐵點(或負極)的電阻異常為0 Ω,并用萬用表蜂鳴擋確認,呈現導通狀態異常(正常時蜂鳴擋不導通)。
4.2.5 故障確認
判斷此故障是OBC模塊的PCAN-H對負極短路。
4.3 故障案例3
4.3.1 故障現象
故障現象有以下幾種:(1)儀表盤上動力系統故障指示燈,側滑故障指示燈常亮。(2)電池管理系統故障指示燈、動力電池故障指示燈、系統故障指示燈、駐車系統故障指示燈、傳動系統故障指示燈一直閃爍。(3)車輛故障但READY燈亮起。(4)散熱風扇無規律自行啟動工作。(5)車輛無法換擋。
4.3.2 故障碼
道通MS908E的故障診斷儀顯示的故障碼如表3所示。
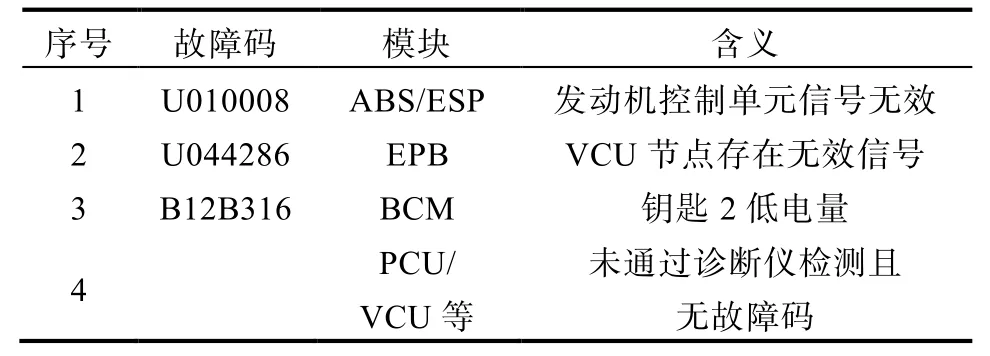
表3 故障診斷儀顯示的故障碼
4.3.3 故障分析
故障分析如下:(1)儀表故障燈閃爍。(2)車輛READY燈亮起。(3)診斷儀顯示部分模塊未通過檢測且無故障碼,初步懷疑故障可能是虛接故障。(4)診斷儀顯示的故障大多數與VCU模塊相關,且VCU節點存在無效信號,未能通過檢 測,因此,優先考慮是VCU模塊的CAN線虛接故障。
4.3.4 故障測試
初步懷疑是虛接故障,可以用試燈進行故障檢測。測試步驟如下:(1)用試燈夾子接低壓蓄電池負極。(2)用試燈探測端測量CA66的7號端子,觀察到試燈微微閃爍且頻率很快,現象正常。說明PCAN總線與VCU模塊連接的PCAN-L線路正常。(3)用試燈探測端測量CA66的8號端子,觀察到試燈在頻率很快的微微閃爍后較長時間不亮,現象異常。(4)用萬用表測量CA66的8號端子至CA04的26號端子之間的電阻,其阻值在0 Ω~∞變化。
4.3.5 故障確認
此故障為PCAN總線與VCU模塊連接的PCAN-H線路虛接。
5 結論
CAN總線技術在汽車網絡通訊方面應用日趨成熟,對于汽車CAN總線系統的故障診斷和維修技術研究也越來越重要。本文對吉利EV450的CAN總線進行了介紹,對其故障診斷思路及排除方法進行了研究分析,并以實際案例展示了車輛具體故障的排除過程。
得出結論為車輛在CAN線故障時,儀表上的電池管理系統故障指示燈和動力系統故障指示燈經常亮起,診斷儀顯示的大部分故障都是模塊連接無效或者通訊超時,且診斷儀讀出的模塊數量有變化。因此,在CAN線故障排除時,首先從儀表和車輛的現象分析,然后結合診斷儀報的故障進行一個故障范圍的確定,接著由淺入深地慢慢縮小故障范圍,最后完成故障確認。
猜你喜歡
裝備制造技術(2020年3期)2020-12-25 05:22:30
汽車維修與保養(2019年7期)2020-01-06 03:30:42
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21