飛行模擬裝備仿真儀表的控制
2022-05-11 21:55:34宋慧營
今日自動化 2022年3期
宋慧營

[摘 ? ?要]文章針對飛行模擬裝備仿真儀表的控制進行研究,設計了基本的步進電機式仿真儀表的控制電路,控制信號由PIC單片機提供,實現了儀表基本的正反轉、調速、指針回零位等控制。在基本控制電路基礎上進行優化,即可達到實際裝備的控制要求。
[關鍵詞]仿真儀表;飛行裝備;步進電機;單片機;控制
[中圖分類號]TP391 [文獻標志碼]A [文章編號]2095–6487(2022)03–00–03
Control of Simulation Instruments of Flight Simulation Equipment
Song Hui-ying
[Abstract]This paper studies the control of the simulation instrument of flight simulation equipment, designs the control circuit of the basic stepping motor type simulation instrument, the control signal is provided by the PIC microcontroller, and realizes the basic forward and reverse rotation, speed regulation and pointer return of the instrument. Bit control. Optimizing on the basis of the basic control circuit can meet the control requirements of the actual equipment.
[Keywords]simulation instrument; flight equipment; stepping motor; single chip computer; control
隨著技術的進行與軍事訓練需求的變化,飛行模擬裝備近年來得到了迅速發展。在飛行模擬器裝備中,作為重要組成部分之一,仿真儀表是飛機模擬器飛行性能參數等關鍵數據的顯示界面,作用是提供給飛行員座艙內的相關信息,以便飛行員做出正確的判斷及開展下一步的操作,其功能優劣直接影響飛行模擬裝備的作用與效果。飛行模擬裝備儀表中多數屬于仿真儀表,如何有效控制是仿真儀表的關鍵。對于仿真儀表,既要求控制其運行速度,又要求控制其運行方向、運行精度及運行完畢做好起始零位控制等。由于步進電動機具有精度高、機械結構簡單、控制信號容易通過單片機等優點,因此在飛行模擬裝備仿真儀表控制系統中,步進電動機式仿真儀表應用越來越廣泛。
1 步進電機原理及單片機特點
帶動仿真儀表指針運行,完成儀表控制任務的步進電機是一種由脈沖信號控制的電機,儀表指針與電機轉子固定在一起作同步運行,要想達到儀表控制,完成電機轉子的同步驅動控制即可。
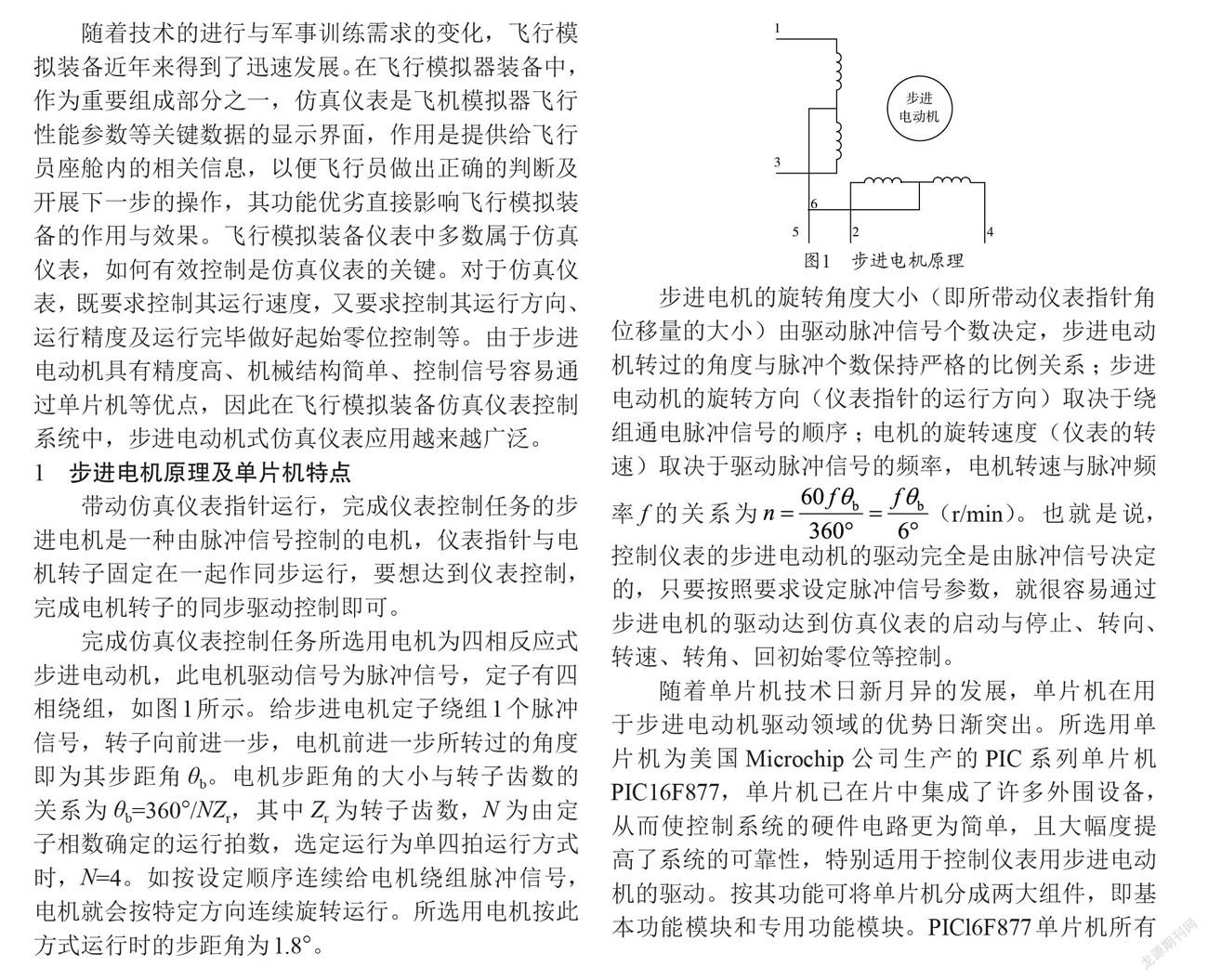
完成仿真儀表控制任務所選用電機為四相反應式步進電動機,此電機驅動信號為脈沖信號,定子有四相繞組,如圖1所示。給步進電機定子繞組1個脈沖信號,轉子向前進一步,電機前進一步所轉過的角度即為其步距角θb。電機步距角的大小與轉子齒數的關系為θb=360°/NZr,其中Zr為轉子齒數,N為由定子相數確定的運行拍數,選定運行為單四拍運行方式時,N=4。如按設定順序連續給電機繞組脈沖信號,電機就會按特定方向連續旋轉運行。所選用電機按此方式運行時的步距角為1.8°。
步進電機的旋轉角度大小(即所帶動儀表指針角位移量的大小)由驅動脈沖信號個數決定,步進電動機轉過的角度與脈沖個數保持嚴格的比例關系;步進電動機的旋轉方向(儀表指針的運行方向)取決于繞組通電脈沖信號的順序;電機的旋轉速度(儀表的轉速)取決于驅動脈沖信號的頻率,電機轉速與脈沖頻率f的關系為 (r/min)。也就是說,控制儀表的步進電動機的驅動完全是由脈沖信號決定的,只要按照要求設定脈沖信號參數,就很容易通過步進電機的驅動達到仿真儀表的啟動與停止、轉向、轉速、轉角、回初始零位等控制。
隨著單片機技術日新月異的發展,單片機在用于步進電動機驅動領域的優勢日漸突出。所選用單片機為美國Microchip公司生產的PIC系列單片機PIC16F877,單片機已在片中集成了許多外圍設備,從而使控制系統的硬件電路更為簡單,且大幅度提高了系統的可靠性,特別適用于控制儀表用步進電動機的驅動。按其功能可將單片機分成兩大組件,即基本功能模塊和專用功能模塊。PICl6F877單片機所有端口引腳采用引腳復用技術,以便增加功能而又不增大體積和引腳數量。系統配置引腳包括電源和接地引腳、時鐘,復位引腳和主復位引腳。輸入/輸出功能引腳分布在PORTA、PORTB、PORTC、PORTD和PORTE5個雙向輸入/輸出端口。PORTB端口的RB3、RB6和RB7引腳被MPLAB-IDE集成開發環境所借用,是低壓編程功能引腳。由于此類單片機強大的功能、高可靠性及多輸入/輸出端口,使用1個單片機即可完成多個儀表的控制任務。
2 步進電機式仿真儀表的基本電路設計與程序設計
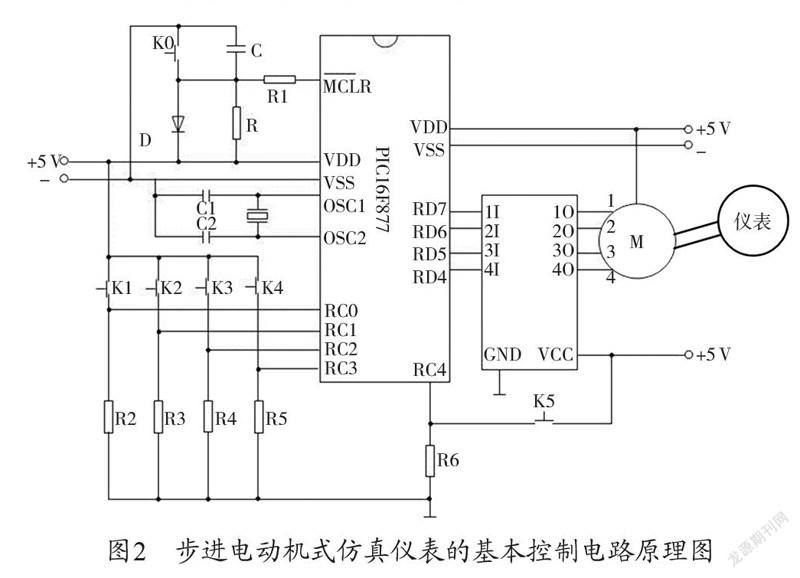
步進電機式仿真儀表的控制系統硬件主要包括PIC16F877單片機、步進電動機、驅動電源和反相器等部分。在電路中,單片機、反相器和步進電機共用+5 V驅動電源;由單片機產生脈沖信號輸入給反相器,輸入高電平經反相器輸出低電平,這樣四相步進電動機中的某一相為低電平,另外三相輸入狀態為高阻態,步進電動機的公共端連接在驅動電源端。當某相繞組為低電平時,該相繞組接通,轉子就會帶動指針轉過一個相應的步距角,按順時鐘方向運行時定子繞組勵磁脈沖信號的順序如表1所示。以輸入信號控制單片機輸出脈沖個數和方向,進而實現電機帶動儀表指針的運行,以及實現儀表指針轉角、轉速和轉向等的控制。
步進電機式仿真儀表的基本控制電路如圖2所示。在設計的控制電路中,以PIC16F877作為處理器,時基振蕩方式為標準的外接晶體振蕩器振蕩方式XT,將PORTC端口RC0~RC4作為輸入引腳,將PORTD端口RD4~RD7作為輸出引腳。所用石英晶體頻率為4MHz。當RD4為高電平、RD5、RD6、RD7為低電平時,經ULN2003A反相,步進電機4端為0 V電壓,1、2、3端為高阻狀態,步進電機順時針方向轉過一個步距角的角位移。然后,RD5為高電平、RD4、RD6、RD7變為低電平,經ULN2003A反相,步進電機3端為0 V電壓,1、2、4端為高阻狀態,步進電機順時針方向再轉過1個步距度的角位移。依次類推,只需控制加在RD4至RD7引腳的脈沖信號,就可使步進電機產生相應角度運行,為此只要計算出脈沖個數即可達到角度旋轉運行控制。在RD4至RD7引腳輸出相反順序的脈沖信號時,步進電機即為逆時針轉動運行方式;RD4、RD5、RD6、RD7全為低電平時,電機停轉,即儀表的指針固定在某個位置。調整RD4至RD7輸出脈沖的頻率可控制電機的轉速,當要求實時性好時,可將脈沖頻率調高。RC0、RC1、RC2、RC3分別控制步進電機4種工作模式,RC4控制指針停留位置,其優先級最高。以一種模式為例,RC0為高電平,指針順時針轉動工作模式,當RC4為高電平,指針保持在現有位置;當RC4變為低電平,指針繼續轉動至最大位置。若RC0變為低電平,指針逆時針回零位,當RC4為高電平,指針保持在現有位置;當RC4變為低電平,指針繼續回零位。
步進電機的單片機控制程序流程簡圖如圖3所示。程序由以下7個模塊組成,變量常量定義模塊:對單片機內所用的工作寄存器地址命名。向量復位模塊:用來設置程序的首地址。主程序初始化模塊:對單片機端口初始化,設置指針可以轉動的最大角。循環檢測模塊:檢測單片機端口狀態,執行相應的工作模式。工作模塊:對應步進電機速度與轉向控制的4種工作模式。工作模式子程序模塊:單片機上電后根據引腳狀態進入一種工作模式,步進電機帶動指針偏離零位轉動,每走一步均要判斷RC4引腳及在該工作模式下控制指針的引腳狀態。若RC4為高電平,指針保持在現有位置。當RC4為低電平,控制指針的引腳為高電平,指針繼續偏離零位;控制指針的引腳變為低電平,指針回零位。通用子程序模塊:查表程序為輸出端口提供脈沖;步進電機每走一步,通過延時程序增加適當的延時時間控制輸入的脈沖頻率,使指針達到最佳線性指示效果。
3 步進電動機式仿真儀表實際控制電路的優化
在實際仿真儀表的控制過程中,在基本控制電路基礎上做了優化。如在單片機中使用C語言可以更容易地完成控制程序;在步進電機式仿真儀表的基本控制電路中,儀表每一步轉過的角度是由電機的步距角決定的,要想在實際控制過程中能夠實現更精準的指示與定位,可選用步距角達到分級(角度)更小的電機,也可采用步距角細分方式;可在軟件程序基礎上優化控制模式,實現電機整個運行過程不分方向,只有在運行過程全部完成后再進行指針回初始零位控制等;在基本電路基礎上,儀表指針的控制是通過計算機給出脈沖個數驅動電機實現的,是1個開環控制系統,為達到更加準確的控制,也可加入檢測模塊,實現電機轉角的檢測,達到閉環控制。
4 結語
采用PIC單片機實現了對步進電機式飛行裝備仿真儀表的控制,此方法機械結構與控制電路簡單,轉角控制精度高,在飛行模擬裝備仿真儀表中應用廣泛。由于PIC單片機自身突出的優點,以其作為核心處理器既經濟又方便且能夠進行程序的創建、編輯、匯編和調試,還能方便而靈活地實現程序的模擬運行,為進一步優化提供了便利;而步進電機的脈沖信號控制及轉角的精確定位,即使開環控制也能達到高精度,使其在儀表控制中被廣泛采用。
參考文獻
[1] 李榮正.PIC單片機原理及應用[M].北京:航空航天大學出版社,2014.
[2] 石廣范.PIC單片機原理與接口技術[M].哈爾濱:哈爾濱工業大學出版社,2012.
[3] 劉廣順.自動控制元件[M].北京:航空航天大學出版社,2016.
[4] 李發海.電機學[M].北京:科學出版社,2020.
[5] 王聰,曹征濤,趙顯亮,等.飛行錯覺模擬器系統軟件的設計和實現[J].醫療衛生裝備,2019,40(5):24-28,37.
[6] 茍永明.祝賀中國計算機自動測量與控制技術協會成立20周年協會報道之五《計算機測量與控制》的發展之路[J].計算機測量與控制,2011(7):6-8.
[7] 楊秉,楊健.基于OpenGL的臨近空間飛艇飛行仿真可視化研究[C]//.全國第19屆計算機技術與應用(CACIS)學術會議論文集(上冊),2008:262-266.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
大眾理財顧問(2016年9期)2016-10-11 17:10:17
科技視界(2016年20期)2016-09-29 13:07:14