基于擾動補償和非奇異終端滑模器的永磁同步電機矢量控制
2022-05-11 07:55:20劉興邦付朝陽劉錚平雙瑞
西北工業(yè)大學(xué)學(xué)報 2022年2期
劉興邦, 付朝陽, 劉錚, 平雙瑞
(西北工業(yè)大學(xué) 自動化學(xué)院, 陜西 西安 710072)
近年來,隨著電推進技術(shù)的迅速發(fā)展以及在國家碳中和、碳達峰的大背景下,新型飛機面向多電甚至全電飛機發(fā)展,這將大大減小飛機中對于液壓、氣壓、機械傳動設(shè)備的使用。與此同時具有體積小、質(zhì)量輕、高功率密度等諸多優(yōu)點的永磁同步電機(permanent magnet synchronous motor,PMSM)將越來越多地應(yīng)用于飛機電動化領(lǐng)域。在實際應(yīng)用過程中,由于非線性等特性,PMSM容易受到系統(tǒng)參數(shù)變化和外界因素的干擾,控制性能不理想[1-2]。為了提高電機的利用價值和控制效果,越來越多的控制方法被應(yīng)用于PMSM控制系統(tǒng)中。滑模變結(jié)構(gòu)控制因其魯棒性強,通過切換項實時調(diào)節(jié)系統(tǒng)的動態(tài)性能,對于受到的外界干擾反映不敏感,成為了當(dāng)前PMSM控制中的研究熱點[3-4]。
文獻[5-7]提出了全局終端滑模控制器,削弱了系統(tǒng)抖振,但無法避免奇異問題且沒有對擾動量做到觀測和反饋補償,當(dāng)系統(tǒng)受到較大干擾時無法保證系統(tǒng)的控制精度。針對終端滑模控制無法避免奇異性問題,文獻[8]將自適應(yīng)模糊控制與終端滑模面相結(jié)合設(shè)計出新型速度控制器,減小了系統(tǒng)抖振,解決了奇異問題,但所設(shè)計的系統(tǒng)中需要對含噪聲的電流進行微分求解,因此減小了系統(tǒng)的魯棒性。文獻[9]提出了非奇異終端滑模面,有效地避免了系統(tǒng)的奇異性問題,但設(shè)計的控制系統(tǒng)仍然存在嚴(yán)重的抖振問題。文獻[10]采用非奇異快速終端滑模面,有效地加快了系統(tǒng)的收斂速度,同時避免了系統(tǒng)中出現(xiàn)奇異問題,但無法保證系統(tǒng)受擾動時的穩(wěn)定運行。無位置傳感器的使用能夠降低系統(tǒng)的復(fù)雜度,相比位置傳感器具有更高的安全性和經(jīng)濟性,受到越來越多學(xué)者的廣泛關(guān)注。為了對轉(zhuǎn)子位置進行跟蹤,文獻[11]提出了反電勢估計法,避免了因?qū)顟B(tài)量微分而產(chǎn)生的大量噪聲干擾,但對于參數(shù)擾動和外界干擾并未做任何補償,影響了系統(tǒng)的控制精度。為了避免對噪聲信號的放大,文獻[12]使用了跟蹤微分器,做到了轉(zhuǎn)子位置的精確跟蹤,削弱了系統(tǒng)的抖振,但系統(tǒng)受擾動時仍無法做到精確跟蹤。
為此,本文設(shè)計了基于非奇異終端滑模面的速度環(huán)控制器,采用非奇異終端滑模面有效地避免了奇異問題,針對外界擾動導(dǎo)致系統(tǒng)控制精度降低等問題,將擾動觀測器估計出的擾動量實時反饋到速度控制器中,提升了系統(tǒng)的抗干擾能力。針對位置傳感器安全性、可靠性等問題,設(shè)計了一種滑模位置觀測器,實現(xiàn)了位置信息的精準(zhǔn)跟蹤。
1 PMSM數(shù)學(xué)模型
本文采用表貼式永磁同步電機(SPMSM),并運用矢量控制中id=0的控制方法,此時PMSM在αβ坐標(biāo)系中的電壓方程為

(1)
式中:Ls為定子電感;R為繞組電阻;Eα,Eβ為αβ軸反電動勢。將(1)式進行變化可得到

(2)
而在dq坐標(biāo)系中的電壓方程為

(3)
式中:ψd,ψq為dq坐標(biāo)系下的磁鏈;Pn為磁極對數(shù),其表達式為
(4)
電機運動方程為
(5)
式中:ωm為轉(zhuǎn)子機械角速度;TL為負載轉(zhuǎn)矩;ψf為永磁體的磁鏈;B為阻尼系數(shù);J為折合到轉(zhuǎn)子上的轉(zhuǎn)動慣量。
2 PMSM控制系統(tǒng)設(shè)計
2.1 非奇異終端滑模的速度環(huán)控制器設(shè)計
傳統(tǒng)滑模控制中,由于線性滑模面的使用,誤差無法在有限的時間內(nèi)收斂到零。為此一些學(xué)者設(shè)計了采用非線性滑模面的終端滑模控制器。但終端滑模面存在奇異問題。因此本文設(shè)計出了非奇異終端滑模速度控制器,保證系統(tǒng)在有限時間內(nèi)收斂為零的同時,又避免系統(tǒng)出現(xiàn)奇異問題[13]。在實際運行過程中SPMSM系統(tǒng)容易受到外部負載擾動的影響,為此本文在設(shè)計的速度環(huán)控制器中引入擾動變量,將擾動量反饋到速度環(huán)中以抵消實際運行中這些變量對系統(tǒng)所產(chǎn)生的影響。
對(5)式進行變化得到

(6)
式中,f(t)為外部擾動量。為了方便控制器的設(shè)計,定義SPMSM的中間狀態(tài)變量為
(7)
式中,ωr為給定轉(zhuǎn)速。對(7)式求導(dǎo)可得
(8)
選取Feng等[9]設(shè)計的滑模面s為
(9)
式中,β>0;p0>q0為正奇數(shù)。因此對滑模面求一階導(dǎo)后不存在負指數(shù)冪次項,避免了奇異性問題。對(9)式求導(dǎo)可得
(10)
本文采用指數(shù)趨近律,將(6)式、(8)式代入(10)式中,得到速度控制器的表達式為
(11)

運用Lyapunov函數(shù)驗證所設(shè)計速度控制器的穩(wěn)定性,可定義Lyapunov函數(shù)為
(12)
對(12)式求導(dǎo),并將(6)式、(8)式、(11)式代入,得

(13)
式中,ε1>0,q1>0。因此,可判別出所設(shè)計的非奇異終端滑模控制器是穩(wěn)定的。滑模控制中抖振使得系統(tǒng)的抗干擾能力顯著提升,但也會影響系統(tǒng)的控制精度。為減小系統(tǒng)抖振,采用飽和函數(shù)代替符號函數(shù),得到新的控制律如(14)式所示,速度環(huán)控制原理圖如圖1所示。
(14)
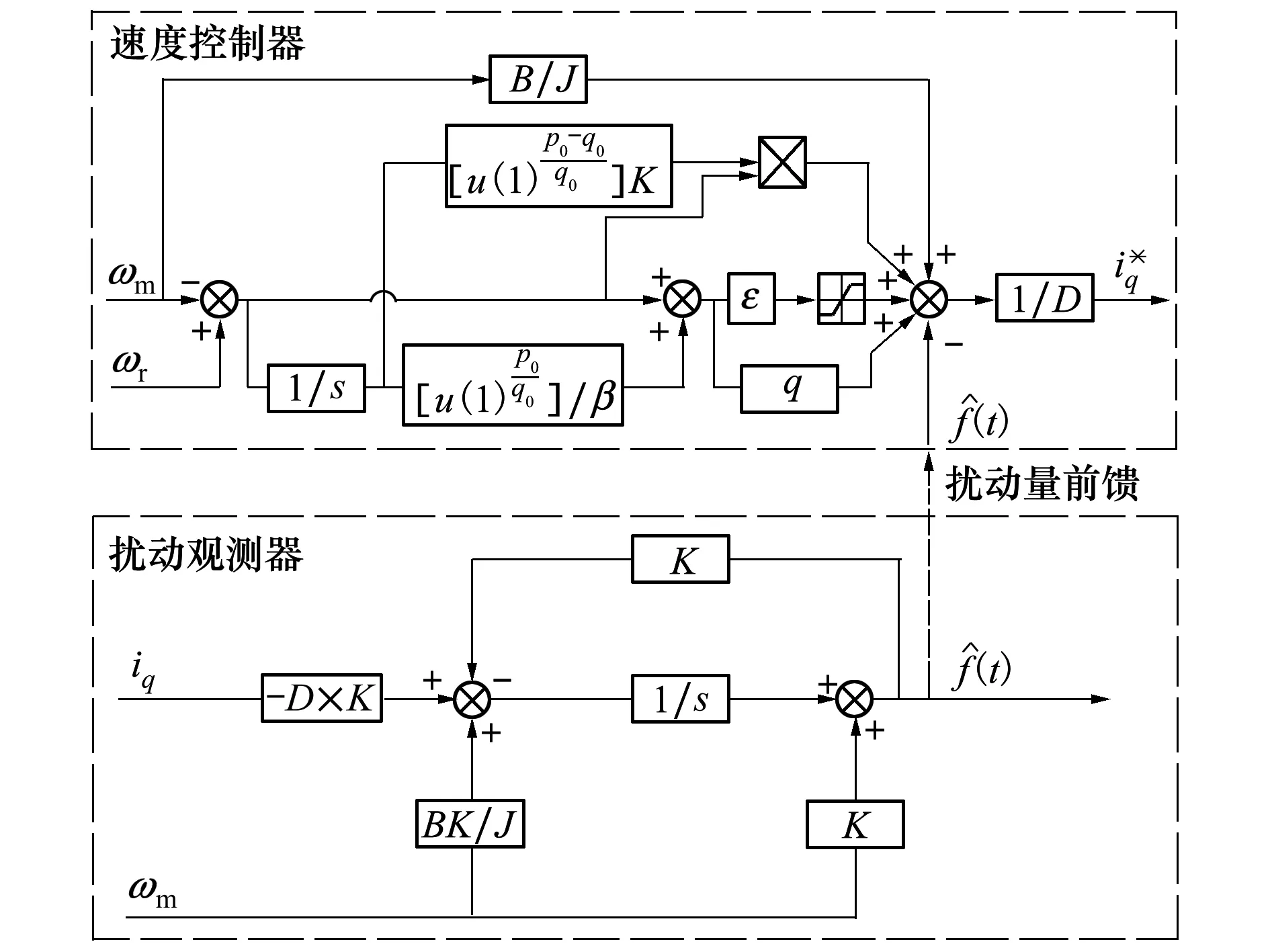
圖1 擾動前饋速度環(huán)控制原理圖
2.2 擾動觀測器設(shè)計
設(shè)計擾動觀測器能夠?qū)ο到y(tǒng)受到的擾動進行實時監(jiān)測,并補償?shù)较到y(tǒng)中,保持系統(tǒng)的穩(wěn)定運行,能夠提高系統(tǒng)的抗干擾能力和控制精度。擾動觀測器的設(shè)計思路是用估計值與實際值之間的誤差對擾動估計值進行修正。即
(15)
式中,K為擾動觀測器增益。根據(jù)先驗知識,擾動量的變化是緩慢的,即
(16)
可以得到觀測擾動量的誤差為

(17)
對(17)式求導(dǎo),并將(16)式代入,得

(18)
通過對(18)式變換得到觀測誤差的動態(tài)方程為

(19)
通過設(shè)計K的值,可以使得擾動估計值按照指數(shù)形式逼近于擾動真實值,即擾動誤差將趨近于零。在(15)式中的狀態(tài)變量速度信號求取導(dǎo)數(shù)的過程中會放大許多噪聲信號,因此無法直接求取導(dǎo)數(shù)。在觀測擾動變量中,通過引入中間量Z,避免噪聲信號的放大,令中間變量為Z=f(t)-Kωm,得到擾動觀測器為
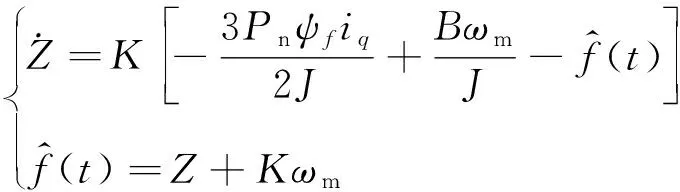
(20)
圖1為根據(jù)(20)式所設(shè)計的擾動前饋速度環(huán)控制原理框圖。
2.3 滑模位置觀測器設(shè)計
根據(jù)(2)式得到估計式

(21)
式中,Vα,Vβ為反電動勢的估計值。構(gòu)造位置觀測器的狀態(tài)變量為
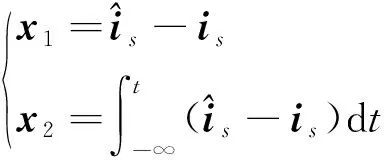
(22)
設(shè)計的滑模面為
s=x1+cx2
(23)
對(23)式求導(dǎo),得到

(24)
Zeq=Es-Vs=Rx1-cLx1
(25)
式中,Es=[Eα,Eα]T;Vs=[Vα,Vα]T;Zeq=[Zα,Zβ]T。為了減小抖振,引入指數(shù)趨近律,構(gòu)造的位置觀測器為
Zeq=-Ls[ε2sgn(s)+q2s+cx1]+Rx1
(26)
運用Lyapunov函數(shù)驗證所設(shè)計位置觀測器的穩(wěn)定性,再定義Lyapunov函數(shù)為
(27)
對(27)式求導(dǎo),并將(24)式、(26)式代入可得

(28)
式中,ε2>0,q2>0。容易驗證
(29)
因此可判別出本文設(shè)計的滑模位置觀測器是穩(wěn)定的。轉(zhuǎn)子位置估計式為

(30)
轉(zhuǎn)速的估計值為

(31)
設(shè)計的控制系統(tǒng)的結(jié)構(gòu)框圖如圖2所示。
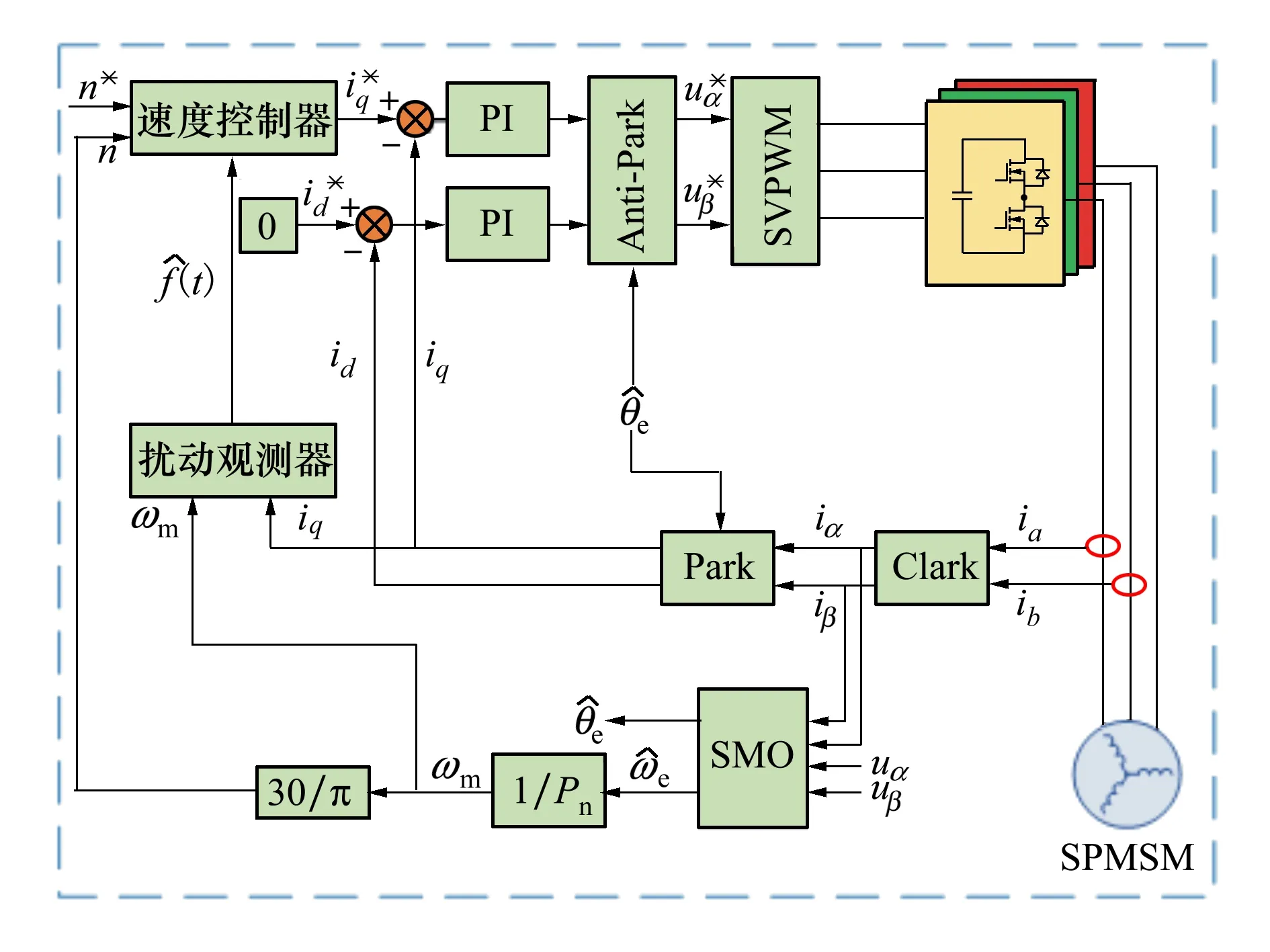
圖2 控制系統(tǒng)結(jié)構(gòu)框圖
3 仿真實驗及分析
在MATLAB/Simulink中搭建控制系統(tǒng),驗證本文提出的控制策略的有效性。仿真參數(shù)如表1所示。
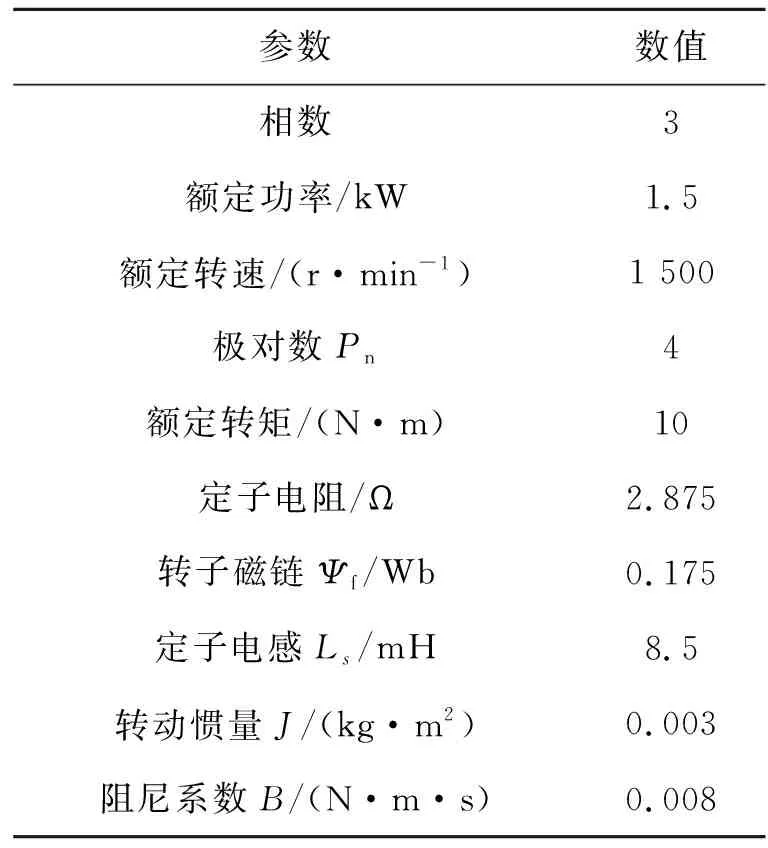
表1 仿真參數(shù)表
本文所設(shè)計的控制系統(tǒng)的參數(shù)為:p0=7;q0=5;ε1=200;q=300;β=5;K=800。傳統(tǒng)滑模控制器的參數(shù)為:c=50;ε=200;q=300。
3.1 速度環(huán)控制器性能
將傳統(tǒng)滑模控制器與本文設(shè)計的非奇異終端滑模控制器進行仿真對比。電機運行的額定轉(zhuǎn)速為1 500 r/min,在0.2 s時刻加入10 N·m的轉(zhuǎn)矩。圖3為2種不同策略下電機的響應(yīng)速度曲線。對比可知,傳統(tǒng)滑模控制系統(tǒng)在啟動時超調(diào)量為37.4%,本文設(shè)計的系統(tǒng)無明顯超調(diào)。同時,本文提出的方法具有更快的響應(yīng)速度,當(dāng)系統(tǒng)受到外部擾動時,傳統(tǒng)滑模控制系統(tǒng)的轉(zhuǎn)速下降約為140 r/min,本文提出的改進滑模控制轉(zhuǎn)速下降約為34.38 r/min,能夠有效降低擾動帶給系統(tǒng)的波動。
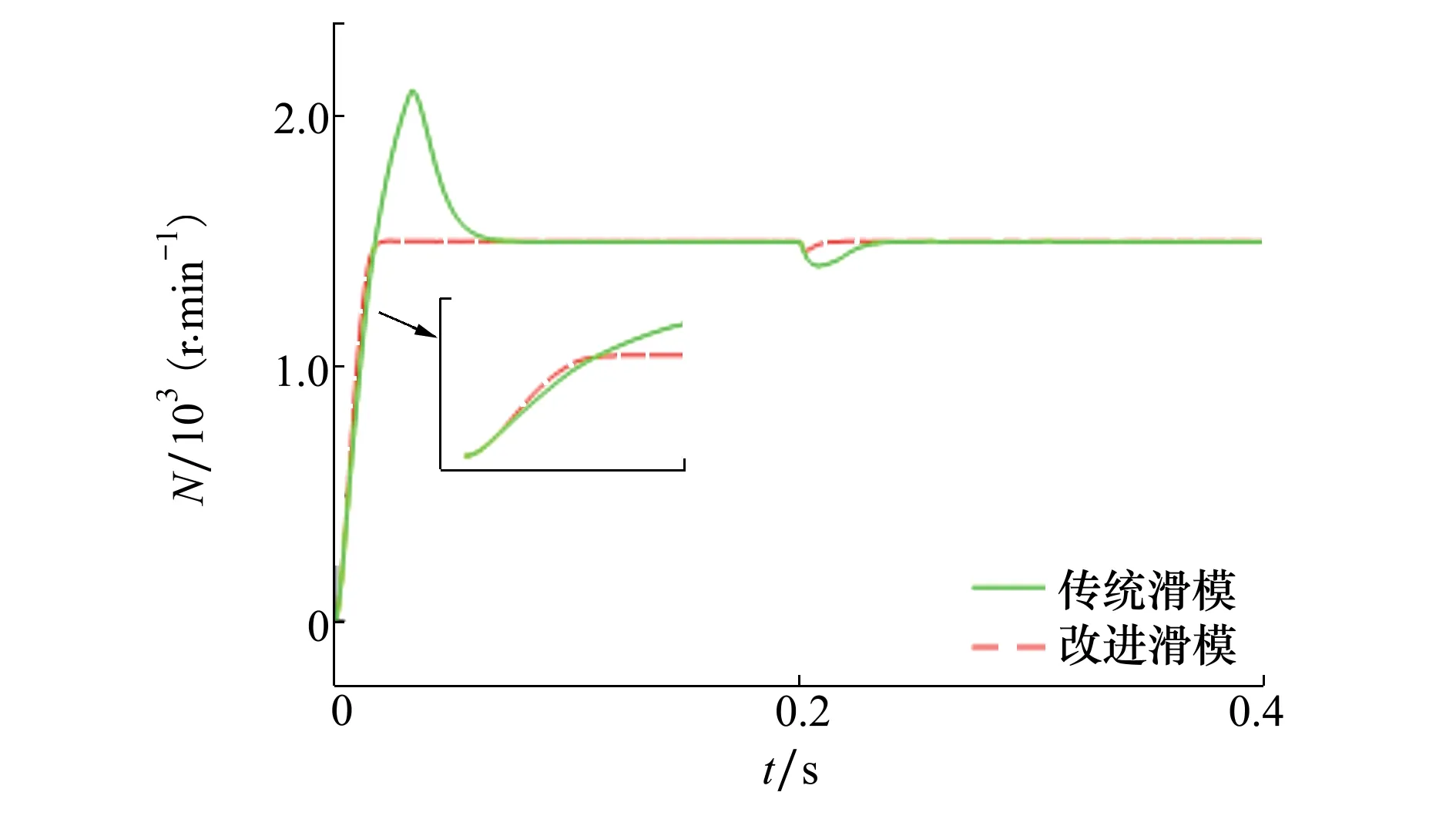
圖3 2種控制策略下轉(zhuǎn)速響應(yīng)
圖4為2種不同策略下q軸電流響應(yīng)曲線,由圖4可以看出,當(dāng)系統(tǒng)受到外部擾動時,本文提出的滑模控制q軸電流相比傳統(tǒng)滑模控制方法受負載擾動影響較小,能夠快速達到系統(tǒng)給定轉(zhuǎn)矩。
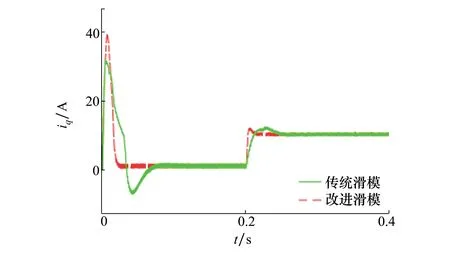
圖4 2種控制策略下q軸電流
3.2 擾動測器性能
對設(shè)計的擾動觀測器模型進行仿真驗證,0.2 s時突然加入10 N·m的負載轉(zhuǎn)矩。圖5為外部擾動估計值與實際值的響應(yīng)曲線,圖6為擾動估計誤差曲線。由圖可以看出,本文設(shè)計的擾動觀測器能快速地跟蹤系統(tǒng)所受到的外部擾動量,0.2 s時當(dāng)系統(tǒng)受到外界負載突然擾動時,所設(shè)計的觀測器能夠迅速地跟蹤擾動量的變化, 可將更精確的擾動估計量前饋至非奇異終端滑模速度控制器,減小了系統(tǒng)的抖振,增強了系統(tǒng)的抗干擾能力。
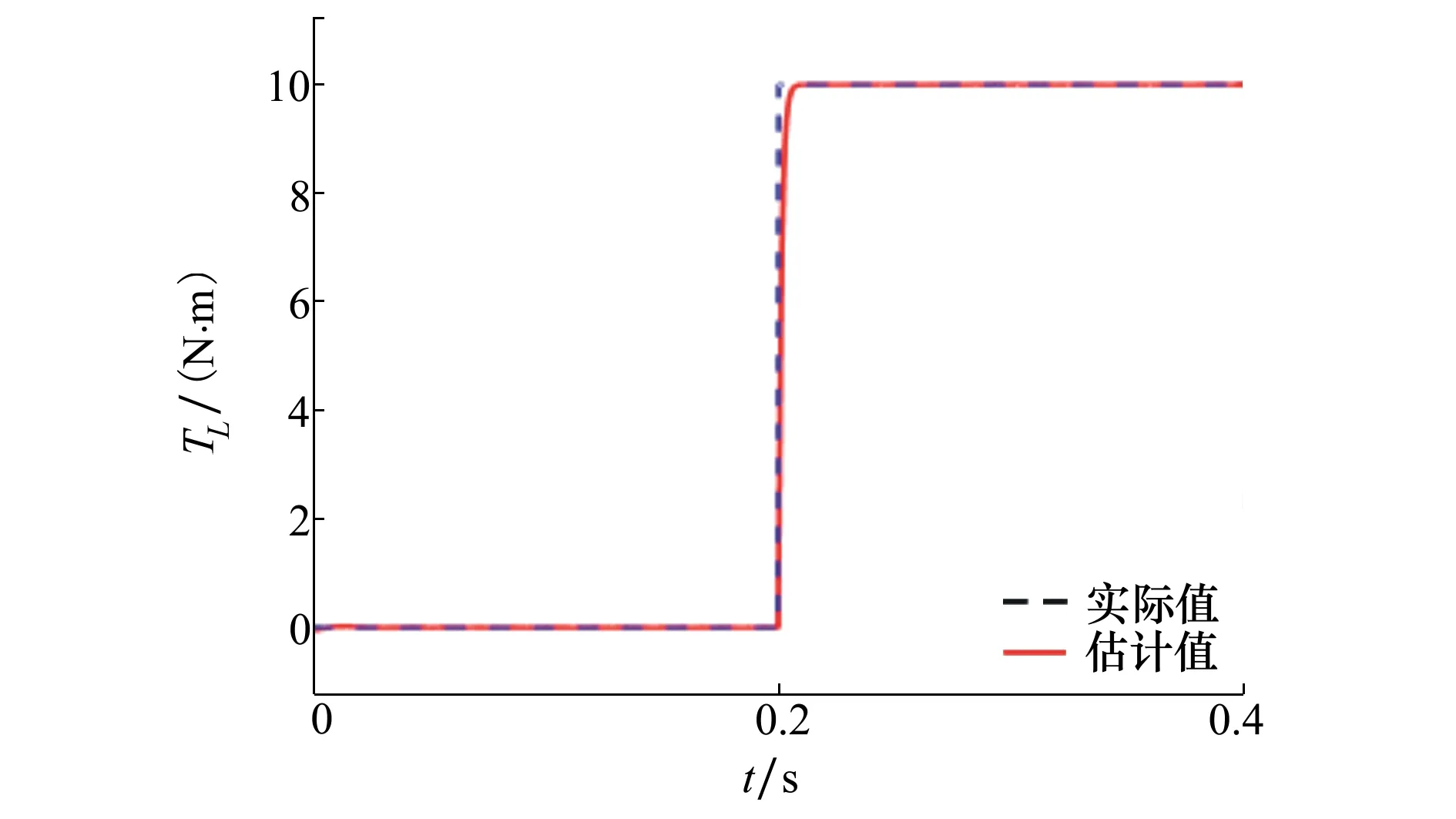
圖5 擾動量估計與實際值對比曲線
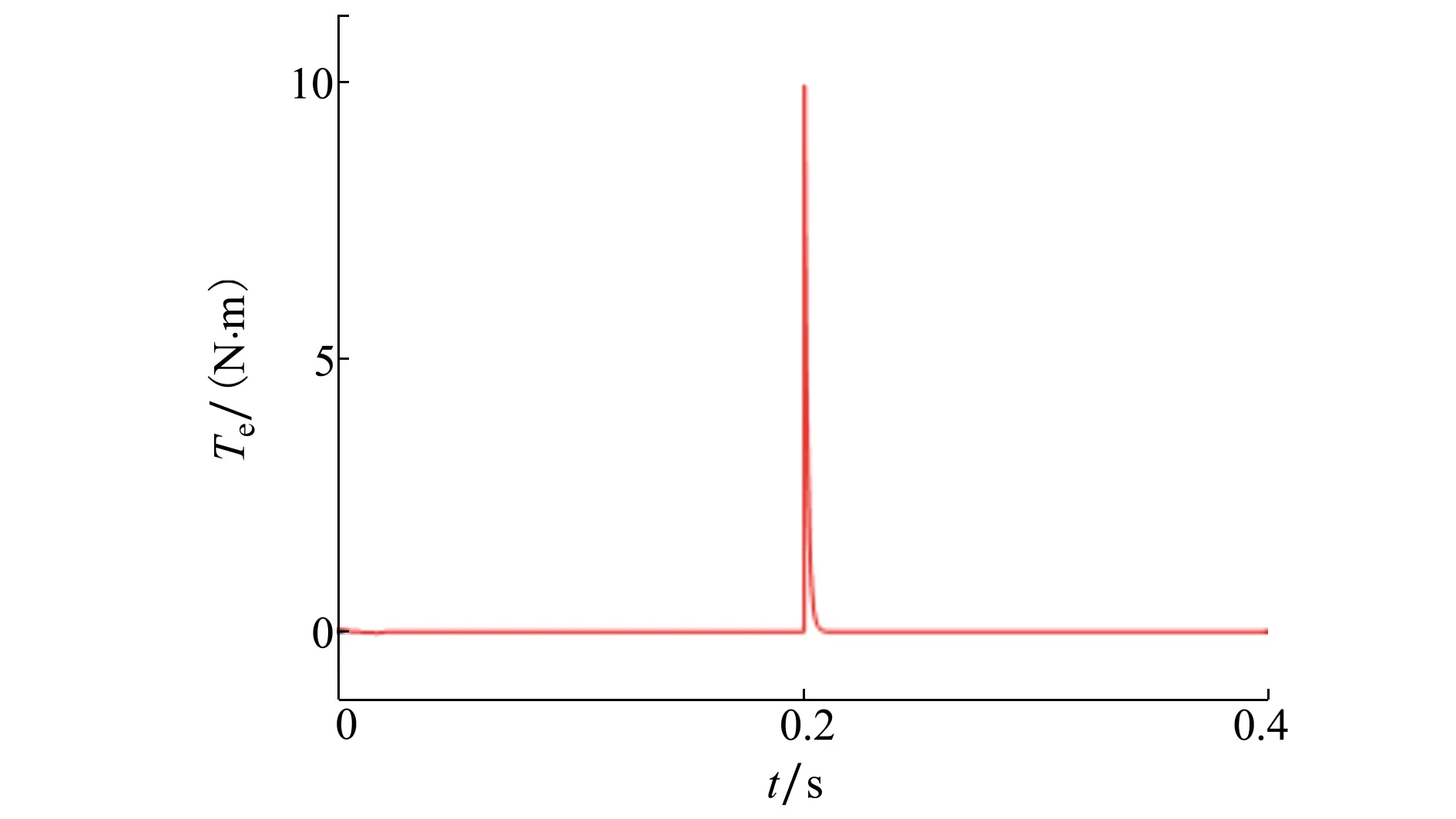
圖6 負載擾動的估計誤差
3.3 位置觀測器性能
圖7為本文設(shè)計的滑模位置觀測器對電機轉(zhuǎn)速的估計值與實際轉(zhuǎn)速的響應(yīng)曲線,本文所設(shè)計的滑模觀測器不需要使用低通濾波器,避免了因相位延遲而增加的相位補償環(huán)節(jié),能夠?qū)﹄姍C的轉(zhuǎn)速做到精確的跟蹤,系統(tǒng)受到擾動時也能夠精確跟蹤轉(zhuǎn)速,且跟蹤誤差較小。
圖8為系統(tǒng)在0.2~0.26 s之間轉(zhuǎn)子位置的估計值跟蹤情況。圖9為0.2~0.26 s之間轉(zhuǎn)子位置估計誤差曲線圖。
由圖8~9可知,本文設(shè)計的滑模位置觀測器對電機轉(zhuǎn)子實際位置具有很好的跟蹤效果,同時沒有發(fā)生相位延遲。

圖7 2種控制策略轉(zhuǎn)速響應(yīng)曲線 圖8 實際位置與估計位置曲線 圖9 位置估計誤差曲線
圖10為三相電流曲線圖,可以看出,各相電流波形為理想的正弦波。
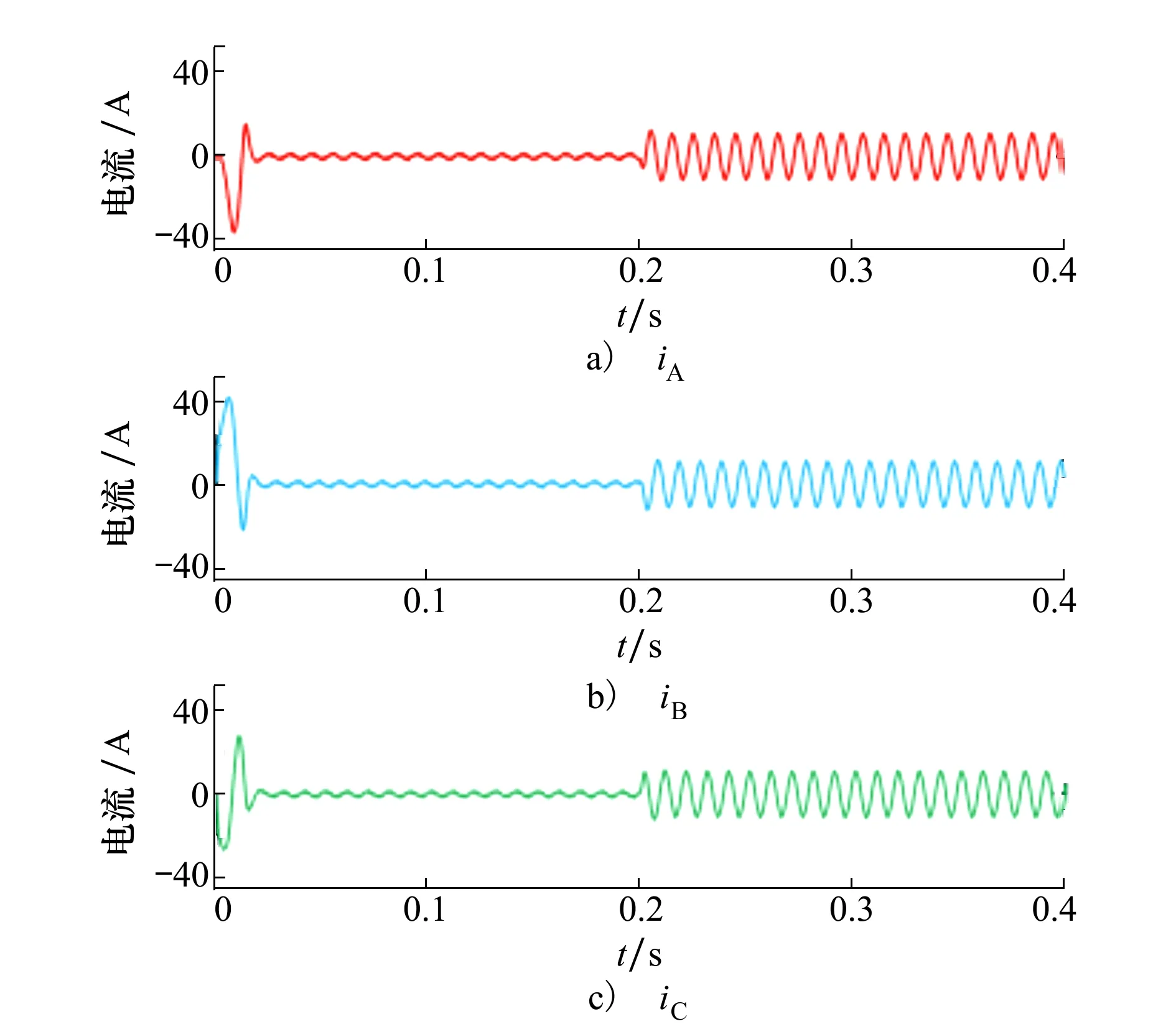
圖10 三相電流曲線
4 結(jié) 論
本文提出擾動觀測器與非奇異終端滑模控制器相結(jié)合的控制策略,使得SPMSM控制系統(tǒng)能在有限時間內(nèi)收斂,在受到外部干擾時,轉(zhuǎn)速波動很小,具有較強的魯棒性。所設(shè)計的滑模位置觀測器能實時精確地跟蹤位置信息,在受到擾動時,系統(tǒng)跟蹤誤差很小。通過仿真實驗驗證了本文提出的控制策略能夠有效提高系統(tǒng)控制精度,減小系統(tǒng)的抖振,縮短系統(tǒng)的響應(yīng)時間,證明了所設(shè)計控制策略的可行性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
