山林區機載LiDAR地面數據獲取探析
2022-05-12 20:24:58唐久清柳學權唐海建
企業科技與發展 2022年2期
唐久清 柳學權 唐海建


【摘 要】山林地區地形陡峭復雜,植被覆蓋率高,機載激光LiDAR是獲取該類地區地面數據的一種有效方式,但目前從點云數據中分離出地面數據仍是一個難點。文章將機載LiDAR數據基于高程信息,通過選取地面種子點和一定的鄰域坡度進行濾波處理后,與差分定位實測的特征點位相融合,從而獲取DTM;并通過模型的精度檢測,驗證了數據的精度基本達到了測繪標準的要求。
【關鍵詞】機載LiDAR;山林;濾波;DTM
【中圖分類號】TP79 【文獻標識碼】A 【文章編號】1674-0688(2022)02-0117-03
0 引言
三亞地處我國南端,屬熱帶季風氣候,熱帶植被密集茂盛,覆蓋率達90%以上,獲取這些地區的地面數據一直都是測繪領域的難點。目前,單點定位技術,移動難、通視差、信號差;而航空攝影測量技術在此類地區獲取的數據精度又比較低,無法達到實用標準。
近年來,測繪領域出現了一種高新技術——機載LiDAR技術,它具有數據獲取快捷、準確度高的優勢,是獲取精確的山林區空間數據的理想方法;但是,激光LiDAR數據采集包括地面、植被等各種物體反射的所有回波信息,所以必須對點云數據進行濾波分類處理,才能獲取有效的地面數據[1]。目前,地形復雜的山林區的激光LiDAR點云數據分類處理,仍是應用熱點,也是難點[2]。
常用的濾波方法有基于數學形態學、基于坡度方法及基于曲面擬合的濾波方法[3]等。基于數學形態學的濾波方法容易丟失很多細節地形;基于坡度的濾波方法根據兩點的距離和高程差閾值確定點類別存在一定的局限性,不能適應劇烈變化的地形;基于曲面擬合的濾波方法對擬合半徑的依賴性大。在綜合比較各類濾波方法的基礎上,根據本項目的實際情況,本研究提出了基于數學形態學與基于坡度相結合的濾波方法。此外,為了提升特征位置的地形數據的精度,本研究進行了特征點位的提取,并把差分定位固定解采集的離散高程數據融入濾波完成后的地面點云,生成DTM。
1 項目背景
本項目位于三亞市中部,屬于高山丘陵區,降雨豐沛,相對地面海拔約300 m。項目面積約5 km2,主要有熱帶雨林和果園等地類,約50%的區域是熱帶雨林區,植被郁郁蔥蔥,藤蔓密布,樹木高度為5~10 m,植被覆蓋率達90%以上;果園(主要種植杧果和木瓜)面積約占40%,杧果地的植被覆蓋率為30%~50%,木瓜地植被覆蓋率為70%~80%;還有少量的水庫區域,面積約占10%。
本項目的主要任務是獲取作業區域(水庫及周圍山體)約5 km2的DTM成果(高程成果精度不低于1∶500地形測量),用于山體坡度分析。測區植被密集,特別是熱帶雨林區,通行困難,采用人工RTK采集數據,不僅需要開辟道路,耗工耗時,而且有些地方地勢低洼,是網絡信號覆蓋盲區,無法準確地采集到有效數據;傾斜攝影也不易拍攝到真實的地面數據且色彩光線散射,精度不高;而激光LiDAR在林區有一定的穿透性,采集數據具有獨特的優勢。對比分析上述各種技術的特點后,最終采用機載LiDAR獲取項目區數據。
2 技術路線
本項目采用飛馬D2000無人機,設置仿地飛行航線,相對地面高度為120 m,掛載飛馬機載D-LiDAR2000模塊采集地面LiDAR數據,同時采用正射相機采集整個測區的光學影像,用于輔助地面植被覆蓋效果分析。
機載激光LiDAR采集的點云十分密集,約180點/m2,數據大量冗余。因此,對數據1 m空間網格單元進行抽稀;抽稀后,對點云進行分類處理,分離出地面點和非地面點,分類的過程就是數據濾波,濾波是獲取數字地面模型的關鍵技術。
目前,大多數濾波算法適用于處理地勢平坦、植被稀疏地區的LiDAR點云數據。相對于地勢平坦的地區,山林地區地形復雜、地勢起伏大,地面點云數量相對較少,為了提高濾波可靠性,本研究利用數學形態學和坡度濾波相結合的方法,即綜合運用2.5D柵格和植被過濾的方法,有效地提高了山林植被密集區的濾波效率。此外,為了提升特征位置的地形數據精度,本研究進行了特征點位的提取,并把單點實測的數據融入濾波完成后的地面點云,生成DTM。具體技術路線如圖1所示。
3 數據處理具體流程
3.1 數據處理軟件
本項目Lidar數據濾波處理采用RiSCAN PRO軟件,該軟件是Riegl公司研發的激光點云后處理軟件,可以處理地面站、車載和機載激光數據,有點云拼接、抽稀、合并、過濾、構建TIN,以及繪制等值線等功能。
數據建模、效果分析運用的是Geomagic軟件,該軟件是一款專業的點云建模軟件,曲面建模編輯非常強大,有各種諸如點云去噪、平滑及抽稀等功能。
3.2 點云去噪抽稀
整個項目共采集約10.5億點,由于數據量巨大,直接過濾植被計算時間較長,因此先按1 m空間單元格、八叉樹抽稀的方法對點云數據進行去噪抽稀,進行去噪抽稀后的點云數量約2 000萬點。
3.3 種子點選取
由于激光的穿透性和多次回波數據,所以經過抽稀后,在植被覆蓋區域,空間上仍有多個高程值,即有可能是植被頂部或中間的值,地面點處于最低點,最低點一般為地面點或低矮的植被點,最低點可以作為地面的種子點。實現最低點過濾目標的濾波方法主要有數學形態學濾波。該方法通常分為3個步驟:①首先確定區內相鄰的兩個地面點的最大間距M,設置一個移動濾波窗口,窗口的大小大于M;②采用移動的濾波窗口過濾整個區域;③窗口的高程由窗口內最小值替代。這種采用規則網格數據結構的運算速度快、操作比較簡單[4]。
RiSCAN軟件的2.5D光柵過濾器是基于數學形態學的濾波方法,按照設定的規則,過濾掉空間上多個高程值的點,最終可以獲取取最高、最低或平均值點云的結果。經過觀察發現,本密林區的地面點,在平面上最大的兩個地面點的間隔在15 m以內。因此,本研究最終選擇設置平面上長和寬為15 m的平面規則網格,作為移動濾波窗口過濾整個實驗區域,然后采用最低值過濾的方法選取點,這樣選取出來的點可作為地面的種子點,地面種子點在單規則網格中的空間位置如圖2(c)所示。
3.4 植被濾除
經過上述兩個步驟獲取到地面種子點,只是少量的一部分地面特征點,不能代表實際的整個地形情況,因此還需要更多、表現地形情況更為詳細的地形特征點。
RiSCAN軟件的地形過濾器中,有植被過濾的功能。地形過濾器是基于坡度的濾波算法,其基本思想是在一般地形狀況下,地面點與某一鄰域內的點之間的高程差應在一個閾值范圍之內,超出該閾值的點則被視為非地面點[5];坡度的兩個要素——鄰域范圍和高差閾值,對算法的結果有著重要影響。該算法的關鍵在于確定函數的閾值,不同的閾值函數代表不同地形的特征信息,可以適應各種不同的地形濾波。并且,為了獲取更為精細的地面高程,可以進行多次的迭代濾波。
本研究把所有的種子地面點做初始地面點,引入第一步抽稀去噪后的點云中,進行首次植被濾波。經過多次實驗,進行迭代濾波次數為8級,基礎網格寬度為0.1 m(即領域范圍),最大坡度角為60°時,獲取的地面點云最為理想。每次植被濾波設置的基礎網格寬度和坡度閾值見表1。
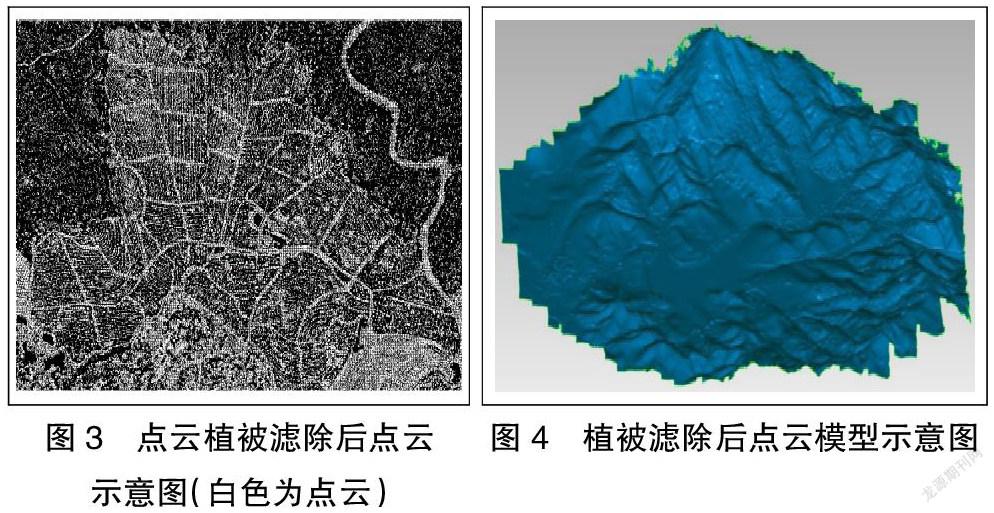
經過植被過濾后點云效果如圖3所示,由此可見,通過采用植被過濾算法保留了大量的原始地面點,植被過濾后,點云數量約400萬點。
過濾后導入Geomagic軟件建模(如圖4所示),模型可以比較直觀地觀察效果:山體比較平滑,非地面點基本上已經濾除干凈。
4 成果及精度檢測
該項目區植被遮擋嚴重,無法獲取路邊等地物的特征點位,因此本研究仍借助RTK,采用差分定位固定解采集離散高程數據的方法獲取一定地物的特征點位,融合入處理后的機載LiDAR點云,生成最終的DTM。
為了檢測數據誤差,本研究現場根據不同植被的覆蓋類型,采用RTK單點定位的方法采集一部分地面檢測點,下面是檢驗誤差情況。
(1)杧果地實際采集檢查點為1 357個,經采用曲面分析工具檢查點與面偏離標準差0.27 m,小于1/3等高距(如圖5所示)。
說明杧果地激光點高程與地面實測點比較,高程接近,但杧果地是梯田坎,采用5 m格網點DTM數據曲面建模后與原始采集高程點比較發現,個別點誤差較大。
(2)山林中實際采集檢查點為1 232個,分布在山脊、山谷、山間小路,以及沿著山體中間分別采集兩條1.2 km和0.3 km的斷面,經采用曲面分析工具檢查點與面偏離標準差1.14 m,小于3/2倍等高距(如圖6所示)。
本測區經過計算,屬于坡度大于25度地區,參照《工程測量規范》(GB 50026—2020)中關于地形類別劃分和基本等高線確定的條款規定:地形屬于高山地類別,基本等高距為1 m,困難隱蔽地區高程誤差可以放寬至3/2倍等高距(見表2)[6]。
5 結論
在本項目中,雖然原始山林植被密集,但是采用綜合濾波的方法可以過濾掉絕大多數的非地面點,然后與單點定位測得的特征點位相融合,從而保證DTM數據的質量。本研究發現,機載激光掃描技術在獲取植被茂密的山林區地面數據具有巨大的優勢,目前它的數據后處理技術和自動分類濾波算法仍然存在一定局限性。經過精度分析發現,誤差大的地方一般為山地中坡度劇烈變化的區域,比如坡度陡降而狹窄的山谷,或者有陡坎的沖溝等區域,這些區域仍需深入研究和采用更好的處理方法,以期提高密林區地形變化劇烈區域或地貌斷裂地區數據的精度。
參 考 文 獻
[1]彭麗.植被密集的陡坡區機載LiDAR數據濾波方法研究[D].重慶:重慶大學,2015.
[2]趙明君,劉超,高翔,等.基于多尺度網格的點云自適應坡度濾波算法[J].合肥工業大學學報(自然科學版),2021,44(2):266-272.
[3]朱笑笑,王成,習曉環,等.多級移動曲面擬合的自適應閾值點云濾波方法[J].測繪學報,2018,47(2):153-160.
[4]周哲.基于LIDAR數據的DLG生產與質量控制技術研究[D].成都:西南交通大學,2012.
[5]鄭漢之.基于并行計算的LIDAR數據濾波方法研究[D].成都:西南交通大學,2011.
[6]GB 50026—2020,工程測量規范[S].
