大型V構橋梁轉體關鍵問題研究
2022-05-12 08:19:08張繩忠
鐵道建筑技術 2022年4期
張繩忠
(中鐵二十四局集團有限公司 上海 200433)
1 前言
隨著我國交通事業的快速發展,交通網絡逐漸完善,鐵路與公路交匯的節點增多,橋梁轉體施工技術憑借其對所跨越線路的低干擾性而越發得到重視[1-2]。在大型繁忙的交通干線上修建跨線橋,橋梁轉體存在顯著優勢,交通運輸部明確規定公鐵路線中存在跨越的地方必須轉體施工[3]。轉體施工法的原理為在橋墩處修建兩個相接觸的球鉸,上、下部分通過固定插銷連接,上轉盤在千斤頂的作用下牽拉旋轉,帶動梁體跨過線路[4]。該方法在技術上存在多項難點,主要集中于設計思路、施工方法和轉體過程監控等方面[5]。
蔡建業[6]研究了超大噸位轉體結構設計的整體流程,包括轉體結構布置、設計關鍵點、檢算要求等。梁志宏[7]闡述了連續梁轉體施工關鍵工藝與方法,并分析了控制施工質量的因素,給出橋梁轉體施工過程中重要步驟的現場處理方法。車曉軍等[8]研究了橋梁轉體時不平衡力矩的預估方法,基于構件受偏心壓縮時的應力流分布,推導了T型剛構轉體橋梁基于球鉸下應力差的不平衡力矩理論計算公式,并結合工程實例驗證其理論的有效性與可行性。張黎明等[9]對大噸位曲線橋轉體實時監控技術進行了研究,提出了轉體可視化實時監控平臺。姚保輝[10]研究了曲線橋梁轉體鋼球鉸設置橫向預偏心技術和曲線連續梁轉體關鍵控制技術。高光品等[11]以京張高鐵土木特大橋作為工程背景,研究分析了墩頂轉體技術的難點與解決方法,并給出球鉸處體系轉換的相關建議。
總體而言,橋梁轉體施工仍是一種新型施工工藝,其轉體過程中結構受力、空間姿態以及牽引結束后的精準調整問題還有待深入探索。本文基于312國道蘇州東段改擴建工程昆山段V型剛構橋轉體工程項目,進一步開展橋梁轉體施工關鍵問題研究。針對轉體橋梁施工控制、臨時支撐拆除監測、稱重試驗、轉體過程監控、橋梁姿態調整等轉體施工全過程關鍵技術問題進行方法與試驗研究。
2 工程概況
本轉體工程為V型剛構轉體連續梁,位于312國道蘇州東段改擴建工程昆山段主線第19聯,跨徑為2×66 m,橋面凈寬34 m,縱坡3.97%。轉體總重量約2.14萬t,為目前國內最大噸位V型剛構轉體橋梁,如圖1所示。

圖1 V型剛構轉體梁現場
該V型剛構連續梁采用“先掛籃懸澆、后平面轉體”的施工工藝,順時針轉體70°就位,梁橋轉體前、后位置如圖2所示。受現場條件、施工工序等因素影響,兩邊墩在轉體之前已澆筑完成。其中大里程側邊墩頂部標高13.9 m,對應梁底標高14.2 m,凈空0.3 m;小里程側邊墩頂部標高18.9 m,對應梁底標高19.4 m,凈空0.5 m。轉體過程中V型剛構需同步跨越兩邊墩,這種“雙跨越式”轉體有精準時空位置要求,橋梁轉動全過程中其縱、橫向均需保持較高平穩性。
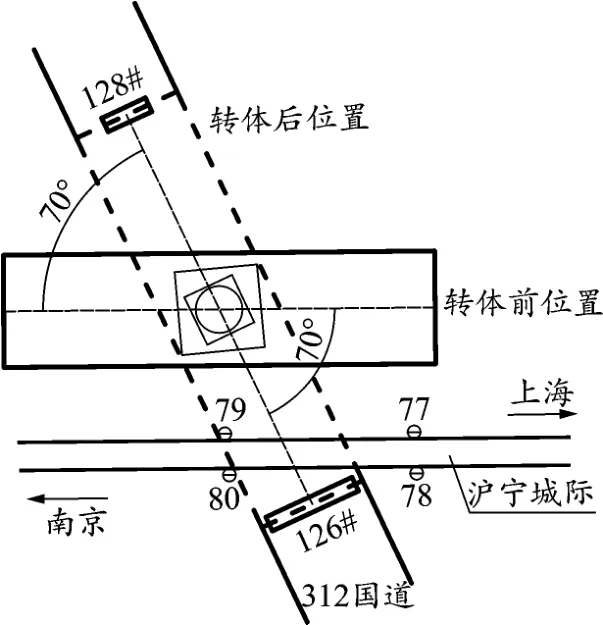
圖2 橋梁轉體前后位置示意
3 轉體V構施工控制
轉體橋梁的施工控制環節,除了對橋梁線形監控外,其重力對稱性也是監控的重點。對于轉體橋梁而言,橋梁結構澆筑完成后自身的平衡性是影響其轉體實施的重要因素,初始不平衡力矩越大則導致稱、配重試驗及轉體牽引復雜性和難度增大。
該V型剛構墩身重心相對地面位置不高,由此帶來的重力分布偏差較小,忽略橋臺、V型墩身及0#塊整體澆筑對橋梁重力對稱性的影響。實際施工過程中掛籃施工時,各號塊的混凝土澆筑方量如表1所示。可以看出,轉體橋梁施工階段產生的重力分布偏差較小,V構兩側混凝土用量僅差3 m3,結構處于較好平衡狀態。
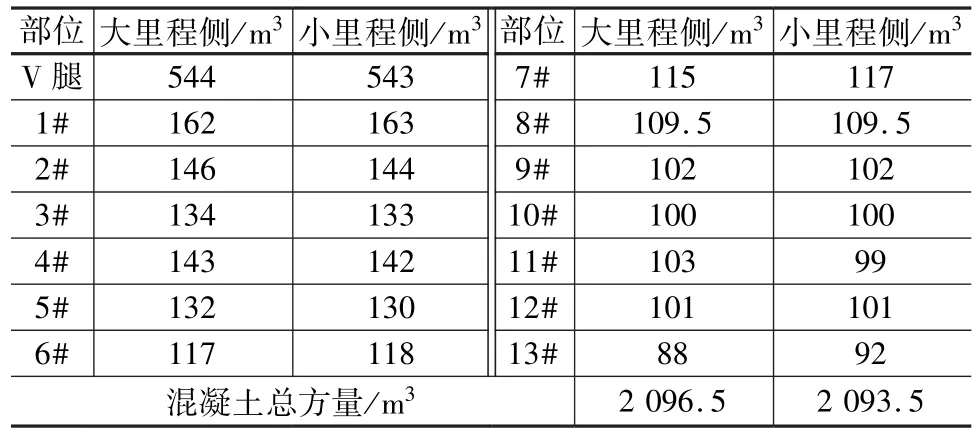
表1 項目混凝土實際用量
除此之外,在稱重試驗和橋梁轉體之前,針對橋梁附屬部件如護欄、橋面鋪裝等的提前施工環節,嚴格控制其對稱性,確保整體結構的平衡。
4 稱重試驗
對梁體進行稱配重是確保轉體過程姿態良好、結構安全的必要環節。通過稱重試驗得到不平衡力矩和轉體球鉸摩阻力矩,再進行轉體姿態分析和平衡配重,確保梁體在正式轉體前處于較好平穩狀態。
4.1 臨時支撐拆除監測
監測梁體臨時支撐(砂箱、撐腳楔塊等)拆除過程中姿態變化有利于初步判斷梁體平衡狀態,指導正式稱重。該V型墩設置有撐腳、砂箱及鋼管混凝土柱作為臨時支撐。在上承臺各邊中點處設置4個位移監測點,正式稱重前按“鋼管混凝土柱-撐腳楔塊-砂箱”依次拆除臨時支撐,其中8個砂箱拆除順序按1、2……、8。測點布置及砂箱依次拆除過程中四個測點位移變化曲線見圖3。
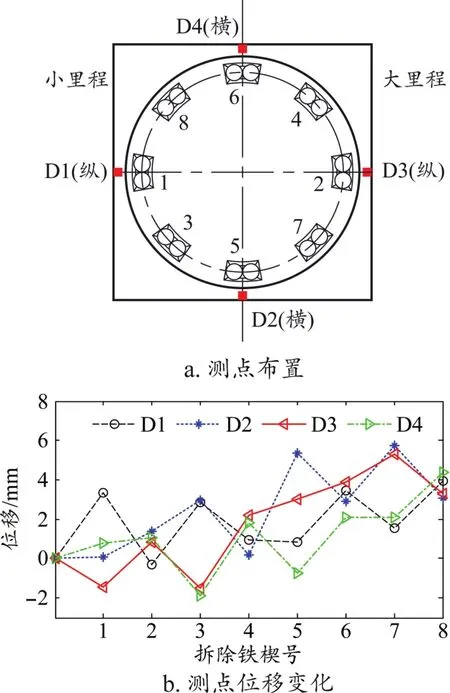
圖3 測點布置及拆除過程位移變化
可以看出,每拆除一處砂箱,梁體會向相應方位產生微小偏移,待全部拆除完成后,4個測點的位移變化基本相同。臨時支撐拆除完畢后整體下沉量約4~5 mm,梁體均勻平穩下沉。
臨時支撐拆除后,V構處于自由狀態,在環境荷載(如風荷載、列車運行環境振動等)作用下,梁體存在微小振動位移。實際監測V型結構承臺處縱橋向測點D1、D3在列車經過時的振動響應如圖4所示。可以看出,兩側測點位移變動頻率、步調一致,其幅值在0.1 mm以內。
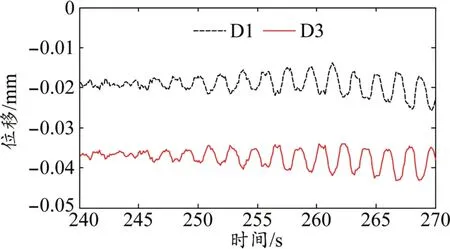
圖4 列車經過時的振動響應
上述監測數據表明梁體基本處于穩定狀態,能自由振動,臨時支撐拆除后不存在撐腳著地的情況,無需進行預配重。
4.2 稱重數據及結果分析
采用液壓千斤頂分別沿縱橋向和橫橋向頂推上轉盤,利用位移傳感器測試記錄承臺四邊中點(如圖5所示)的位置變化曲線,以此確定V型剛構發生剛體轉動的臨界點。千斤頂到轉軸平均距離為R=6.31 m,初始頂推時的力-位移曲線如圖5所示。可以看出,由于上、下轉盤接觸面處長時間擠壓,初始頂推通常需要較大的頂力來克服靜摩擦。當梁體滑動的瞬間,靜摩擦轉變為滑動摩擦,結構存在瞬時不平衡力,導致梁體加速轉動,導致千斤頂和梁體之間出現短暫的脫離,呈現出位移數據迅速增大而頂推力減小的現象,直至梁體與千斤頂再次接觸。所以初始頂推的臨界荷載點是克服靜摩擦對應的臨界點。

圖5 初始頂推力-位移曲線
初始頂推之后,開展正式稱重實驗。沿縱向分別在大里程側和小里程側進行頂推時的實測力-位移曲線如圖6所示。可以看出,當頂推力逐漸增大至臨界點時,V型剛構隨上轉盤出現剛體轉動,到達突變點需要的頂力相較圖5較小,而且過渡較為平緩,梁體時刻處于平衡狀態。
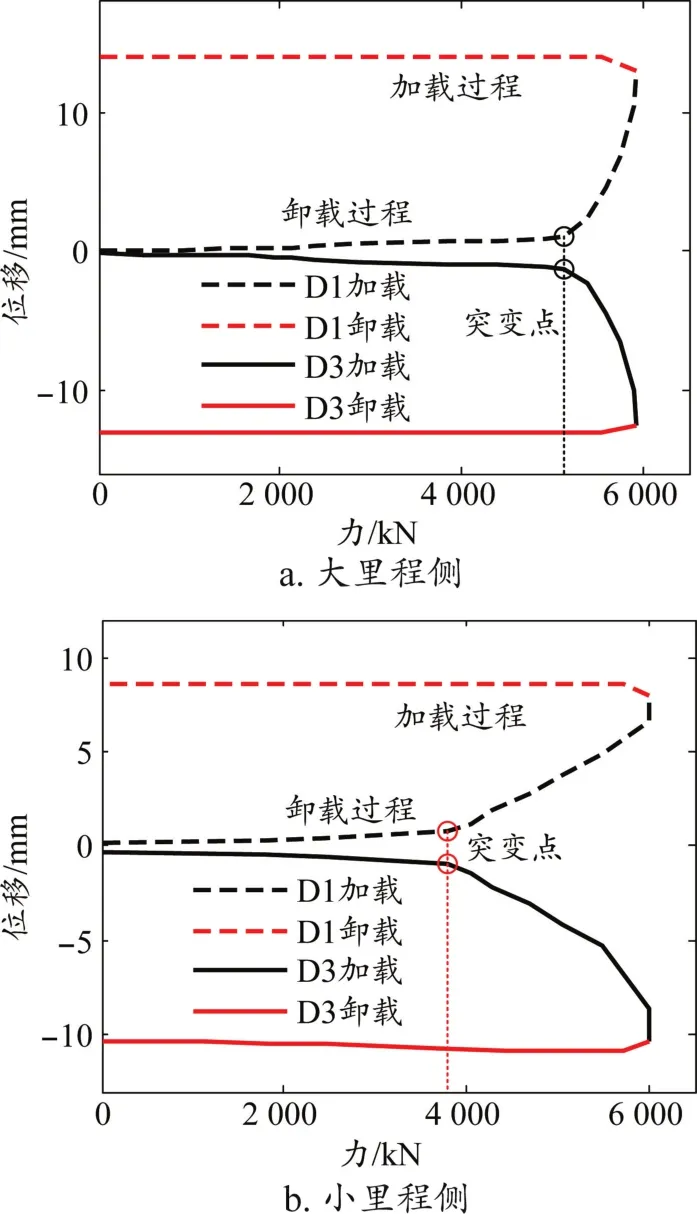
圖6 大、小里程側頂推力-位移曲線
基于試驗數據進行計算分析,得到V型剛構縱、橫橋向不平衡力矩、摩阻系數等特征參數。其中:摩阻力矩為28 650 kN·m,縱向不平衡力矩為4 850 kN·m(偏向小里程側),橫向不平衡力矩為2 150 kN·m(偏向北側),實測球鉸摩阻系數μ=0.015 5。縱向實測偏心距為0.023 m,采用配重塊配重的方式,于大里程側距橋墩中心35 m縱軸線處布置14 t配重塊;橫向實測偏心距為0.011 m,不作配重。
5 轉體過程監控
轉體過程監測目的在于確定橋梁結構實時位置是否處在合理范圍內,以及與周圍環境是否存在接觸的可能,包括轉動角度監測和空間位置監測。轉角量測多采用預設刻度光標方式進行初略監測,臨近轉動結束時通過預設限位裝置防止過轉。空間位置監測側重于對轉體過程的實時評估,尤其針對跨越障礙物的精準轉體問題,是保障轉體順利實施及總體結構安全的重要措施。
陽澄湖蘇州工業園區V型剛構橋轉體過程中兩懸臂端均跨越邊墩,因此要求轉體全過程梁底標高均高于墩頂標高。在V型剛構兩懸臂端設置高程監測點P1~P4,每轉動5°測試記錄4個高程監測點數據,由此計算各時刻梁底高程與對應墩頂標高的距離,如圖7所示。

圖7 測點布置及梁端-墩頂豎向凈空監測
可以看出,轉體全過程兩懸臂端底部相對墩頂均存在足夠凈空,小里程側墩、梁凈空維持在45~58 cm之間,大里程側墩、梁凈空介于22~35 cm之間。轉動過程中,梁端高程雖有微小波動,但整體呈現較好平穩性,可實現精準轉體。
6 橋體姿態調整
橋梁轉體牽引過程主要使結構沿設計轉軸(通常為豎軸)轉動至目標角度,但梁體轉動過程中由于結構的微小偏心或其他不確定因素影響,通常還會存在繞水平軸的轉動,使得梁體轉過設定角度后整體姿態與設計的預期姿態之間不可避免地存在偏移。因此,轉體后結構的姿態調整是保證成橋線形及受力合理的必要環節。
橋梁轉體牽引完成后,實測橋梁結構三個以上固定點的坐標,作為姿態調整的參考控制點。例如選取懸臂端上邊界點作為姿態調整參考控制點,其坐標記為Bi=[xi,yi,zi]T,i=1 ~3。 結合設計參數和監測資料確定上述參考點成橋后的目標坐標值,假定記為B′i= [x′i,y′i,z′i]T,i= 1 ~ 3。 姿態調整參考點的選取應充分考慮實際坐標測試和設計坐標目標值獲取的便捷性。考慮橋梁發生剛體運動,對點Bi到B′i的剛體變換可由變換矩陣H表示,該矩陣可描述橋上每個點位的坐標變化。
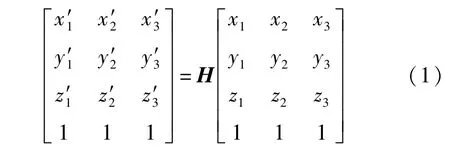
變換矩陣H可記為:
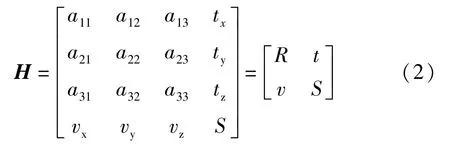
式中:R為旋轉變換子塊;t為平移向量;v為透視變換向量;S為整體比例因子。
對于轉體橋梁牽引就位后的姿態調整問題,其變換矩陣H中平移向量t一般可忽略,主要考慮其旋轉變換子塊R。假定牽引結束后橋梁姿態調整順序為Z、X、Y,即依次繞三軸轉動適當角度αZ、αX、αY。 根據文獻[12]可計算αZ、αX、αY具體角度,轉體牽引到位后,調整角αZ一般較小而忽略不計,如需調整則以點動式轉動牽引作調整手段。角度αX、αY的調整則通過頂推上轉盤來實現,如圖8所示。

圖8 姿態調整頂推布置
頂推時位移監測點仍如圖3所示,縱、橫橋姿態微調時使整體結構依次繞X軸、Y軸轉動角度αX和αY。姿態調整千斤頂的頂推量分別為:

式中:rX、rY為頂推點到球鉸軸線距離。
直至各個監測點位置變化達到預期值ΔhX和ΔhY,即完成對梁體姿態的調整。
7 結束語
本文工程背景轉體橋梁為國內最大噸位V型轉體結構,轉體時需同時跨越兩側既有邊墩,其施工難度大,具有重要研究意義。論文采用理論分析和現場測試結合的方式對轉體工程稱重試驗、轉體過程監測及姿態調整等關鍵問題開展研究。結果表明施工階段的準確控制以及合理稱配重是結構維持基本平衡、是保證橋梁精準轉體關鍵因素。本文在指導本大型V型剛構橋順利轉體實施的同時,還為今后轉體橋梁建設提供參考。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年9期)2021-07-16 07:11:36
中華詩詞(2019年7期)2019-11-25 01:43:04
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
山東工業技術(2016年15期)2016-12-01 05:31:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
現代企業(2015年9期)2015-02-28 18:56:50