全電動賽車用開關磁阻電機優化設計
2022-05-12 02:53:44李秀玲
微特電機 2022年4期
王 蕾,高 翔,李秀玲,申 俊
(1.河南機電職業學院,鄭州 451191;2.鄭州鐵路職業技術學院,鄭州 451191)
0 引 言
由于能源危機與環境污染問題日益突出,電動汽車在節能、環保方面的優勢逐漸受到人們的關注,全電動汽車的研究和發展已經成為當今世界汽車工業發展的新趨勢[1-2]。電機驅動系統是電動汽車驅動的核心,目前汽車用大功率驅動電機以永磁電機、異步電機、開關磁阻電機為主導[3]。開關磁阻電機具有結構簡單、可靠性高、調速范圍寬、高速效率高、過載能力強等優點,逐漸成為電動汽車驅動系統的優秀方案之一[4-6]。
開關磁阻電機的非線性特性、轉矩脈動以及噪聲成為研究的重點,國內為學者從本體結構和控制策略方面提出很多解決方案,推動了開關磁阻電機在汽車領域應用的發展[7-8]。但將開關磁阻電機系統設計與汽車性能需求結合在一起,從整體角度出發去設計符合汽車性能的研究還比較少[9]。本文以全電動賽車為平臺,發揮開關磁阻電機系統的優勢,設計了一臺與全電動賽車匹配的高速開關磁阻電機,最大限度提升賽車性能。
本文主要開展了以下方面的工作:首先,分析了賽車各種工況下的性能需求,制定了開關磁阻電機系統的性能指標;其次,根據以上指標,運用有限元仿真優化了開關磁阻電機本體設計方案,采用多相激勵法代替單相疊加法計算合成轉矩,并提出低速工況下變斬波電流控制方式;再次,基于電機轉速與變開通、關斷角分析了開關磁阻電機功率/效率map;最后通過實驗測試驗證了方案的可行性。
1 純電動賽車動力匹配性能需求
1.1 純電動賽車主要參數
中國大學生電動方程式賽車基本參數:總質量M0=355 kg;輪胎外徑ri=0.232 m;迎風面積A=1.0 m2;滾動阻力系數f=0.02;傳動效率ηt=0.9;迎風阻力系數Cd=0.35;輪胎附著系數ε=1.0~1.4;重力加速度g=9.81 m/s2。
1.2 實際工況對電機性能的要求
為滿足各項賽事需求并提升賽車綜合性能,電機轉矩設計應滿足以下條件:
1)在起動時刻提供最大的加速度amax;
2)直線加速尾速大于vmax,峰值輸入功率不大于80 kW(限定);
3)耐久賽加減速過程中提供較大加速度;
根據仿真得到賽車最高車速vmax=120 km/h,耐久賽中使用最高車速ui=60 km/h,減速比i0=8.2;建立賽車數學模型,賽車起動時刻,在保證輪胎與地面無相對滑動的前提下,電機輸出最大轉矩Tmax,以獲得最大加速度amax[10]:
(1)
根據以上數據,m0為賽車加速時驅動輪得到的質量分配,取輪胎附著系數ε=1.4,根據賽車設計的質心高度、輪胎負荷、產生加速度,求得賽車加速度amax=9.8 m/s2,電機輸出的最大轉矩Tmax=109.5 N·m。電機最高轉速以及最高轉速下的輸出功率[10]如下式:
(2)
求得nmax=11 251 r/min,Pmax=11.4 kW,可見最高車速下勻速運行,電機需求功率很小。
耐久賽中賽車在最高速度時ui=60 km/h,驅動電機仍提供的最大加速度amax,則電機功率[11]由下式確定:
(3)
此時電機輸出功率為65.5 kW,對應電機轉速ni=5 625 r/min。
根據以上確定目標,初步確定高速開關磁阻電機參數,如表1所示。
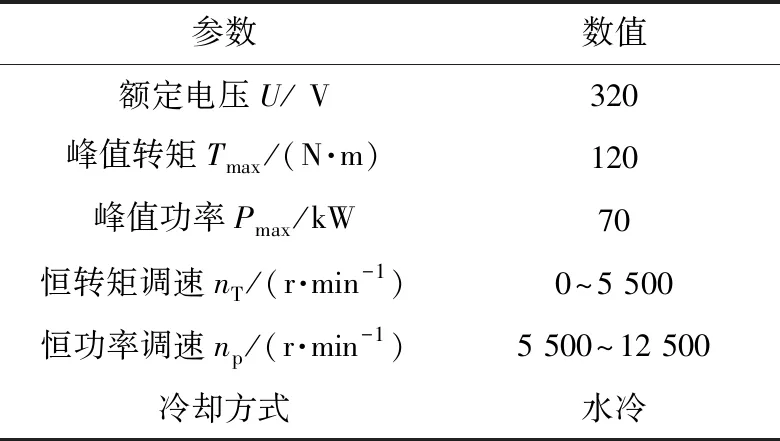
表1 高速開關磁阻電機性能參數
2 高速開關磁阻電機本體設計
2.1 電機結構參數
針對上節的性能參數,運用開關磁阻電機基本約束方程[12],確定開關磁阻電機電磁方案基本參數,如表2所示。

表2 高速開關磁阻電機本體參數
2.2 開關磁阻電機非線性模型
開關磁阻電機具有雙凸極結構和磁路非線性的特點,在運行期間,其繞組電感不是常數,而是電流和轉子位置的函數,開關磁阻電機各種參數和各種物理量都是轉子位置和電流的復雜函數,難以用簡單的解析式來表達,其電磁轉矩一般根據磁場儲能或者磁共能求得[13]:
(4)
式中:Te為電機電磁轉矩;W′(i,θ)為磁共能,ψ為繞組磁鏈,i為繞組電流。利用仿真獲得的不同轉子位置下磁鏈-電流關系(如圖1所示),即可求得電磁轉矩。
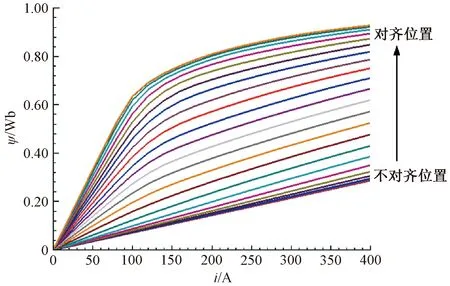
圖1 不同轉子位置下磁鏈-電流曲線
2.3 起動轉矩優化
當開關磁阻電機低速運行時,繞組內的反電動勢很小,開通時刻電流能夠迅速達到斬波電流幅值,當采用滯環斬波控制方法時,可以認為電機工作在恒流源激勵工況下。因此,可以采用靜磁場替代瞬態場計算輸出轉矩。采用靜磁場計算有兩個優點:第一,靜磁場計算采用自動加密剖分技術,每一步的計算結果必然收斂;第二,低速情況下,靜磁場計算相較于瞬態場計算耗時短,節約計算資源。本文采用靜磁場計算開關磁阻電機起動轉矩。起動時開關磁阻電機工作在過載狀態,電機定、轉子鐵心嚴重飽和,由于電機的雙凸極特性,輸出轉矩與轉子位置有很大關系,同時電機起停位置具有隨機性,所以需要計算一個周期內輸出轉矩波形,然后提升電機最小轉矩。
起動時為確保電機輸出足夠轉矩,開關磁阻電機通常以180°電角度導通,在此過程中會存在換相過程。以往計算的方法:計算單相轉矩,通過單相轉矩疊加獲得合成轉矩[14],此方法沒有考慮換相時兩相電流同時導通對磁場飽和程度的影響。本文采用多相電流激勵法替代單相轉矩疊加法,在換相時刻,將兩相電流同時作為激勵源,然后計算電機輸出轉矩,此方法可以考慮兩相導通時磁場飽和對輸出轉矩的影響。圖2是兩種方法計算輸出轉矩對比。可以看出,考慮磁場飽和的影響,兩種方法計算的兩相導通時的輸出轉矩存在明顯差異,顯然考慮兩相同時激勵時帶來的磁場飽和效應,降低了合成轉矩的輸出能力。
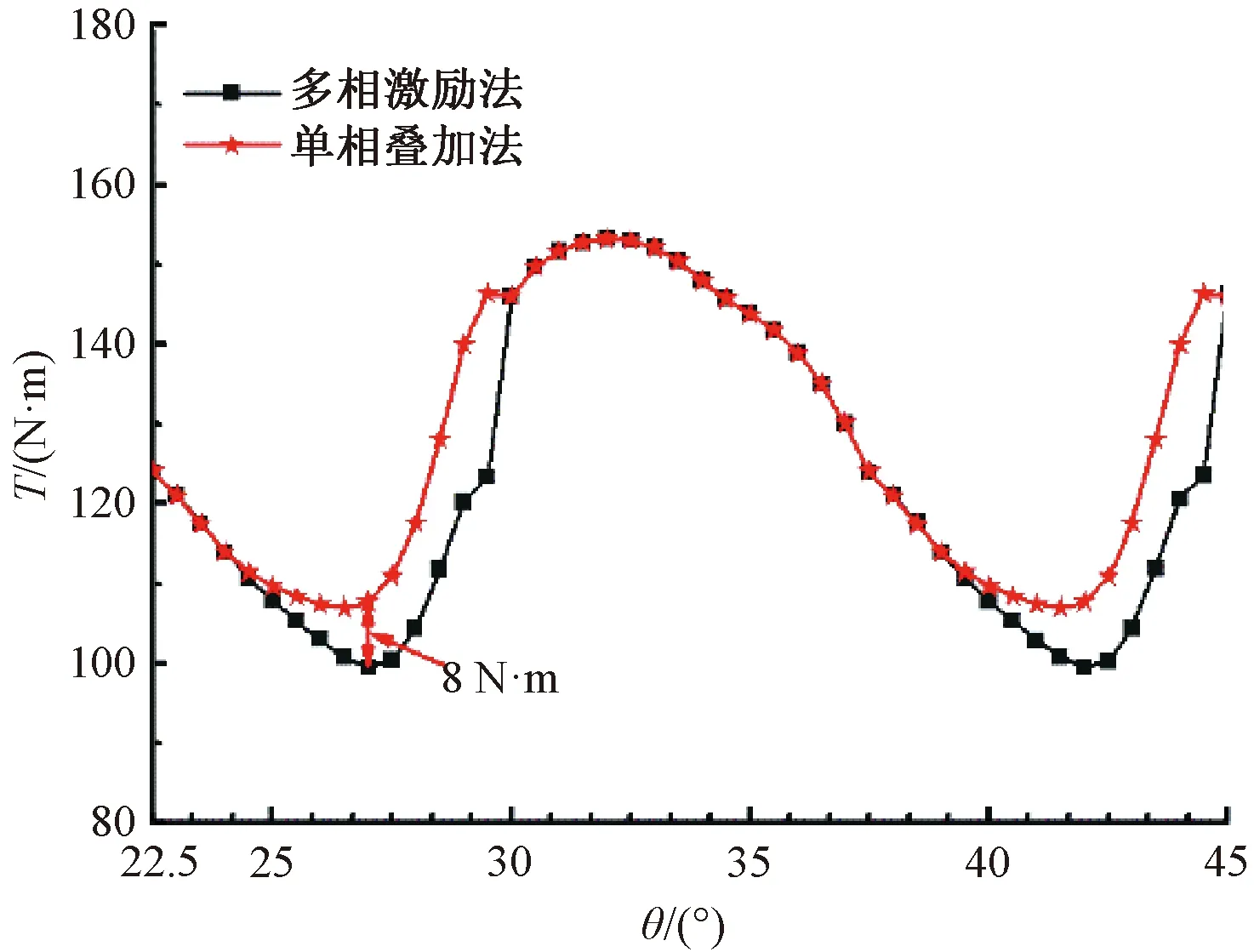
圖2 多相激勵法和單相疊加法計算合成轉矩對比
基于多相激勵法,通過對轉子極形、定子極形、定轉子軛厚等尺寸參數運用遺傳算法進行了優化[15],確定一組性能最優組合,如表3所示,并計算一個周期內不同電流幅值下的轉矩波形(I-θ-T),如圖3所示。可以看出,在最小轉矩提升的同時,最大轉矩也在提升,故合成轉矩的脈動并沒有減小。由于賽車用電機不同于普通電動汽車用電機, 它不但要提供最大的加速度, 而且又要保證輪胎相
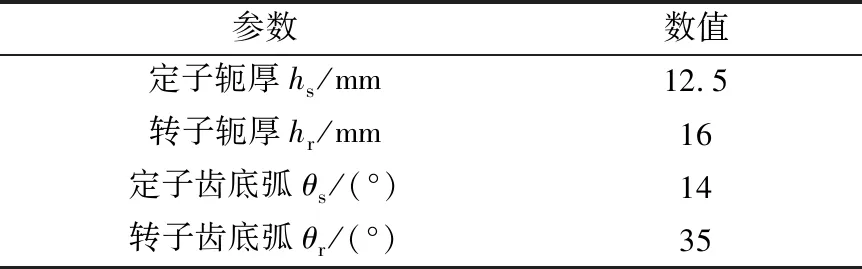
表3 優化后電機參數
對于地面不能產生滑動,所以還應該力求開關磁阻電機起動時刻具有較小的轉矩脈動,本文采用變斬波電流控制方式,達到一個周期內電機轉矩保持基本恒定。根據給定的目標轉矩Ttar,在圖3中作一平面轉矩Ttar,則平面與曲面的交線即為當前轉子位置θtar處的斬波電流Itar。為提高響應速度,實際采用方法:將圖3數據反演,得到轉子位置-轉矩-電流關系(T-θ-I),如圖4所示。根據需求的轉矩Ttar和當前轉子位置θtar,可以查得對應的斬波電流Itar,將θtar-Itar形成一個周期內的預制表,利用有限元方法,即可得到轉矩波形,如圖5所示,此時轉矩脈動僅為0.3%。可以看出,只要獲得當前轉子位置,給定相應的斬波電流,即可獲得在不同位置、相同大小的起動轉矩。
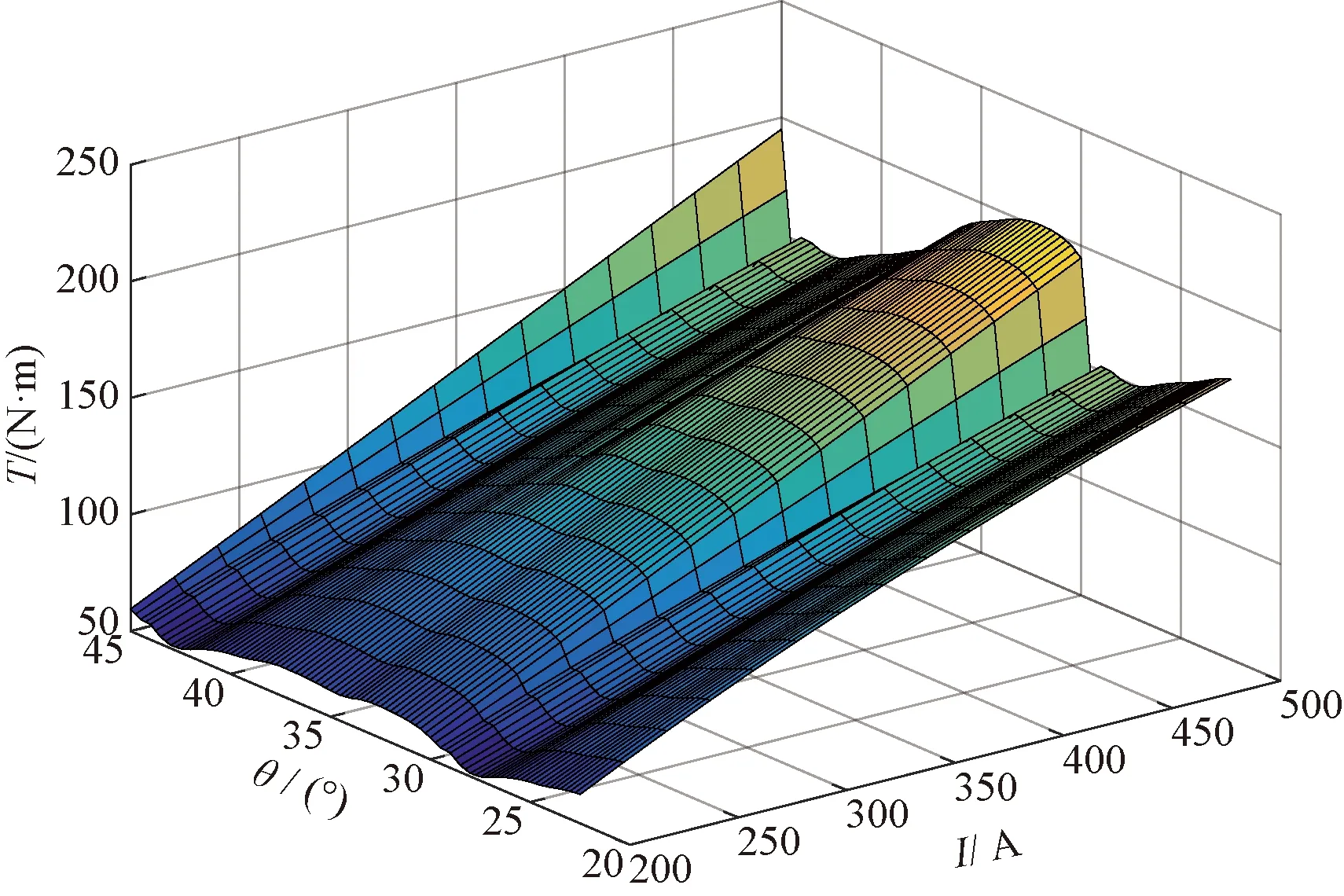
圖3 位置-電流-轉矩關系
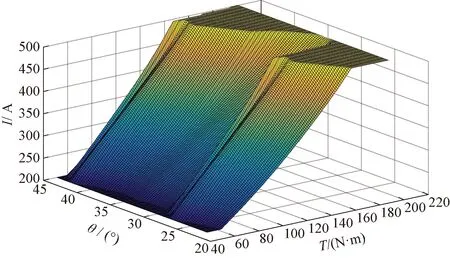
圖4 位置-轉矩-電流關系
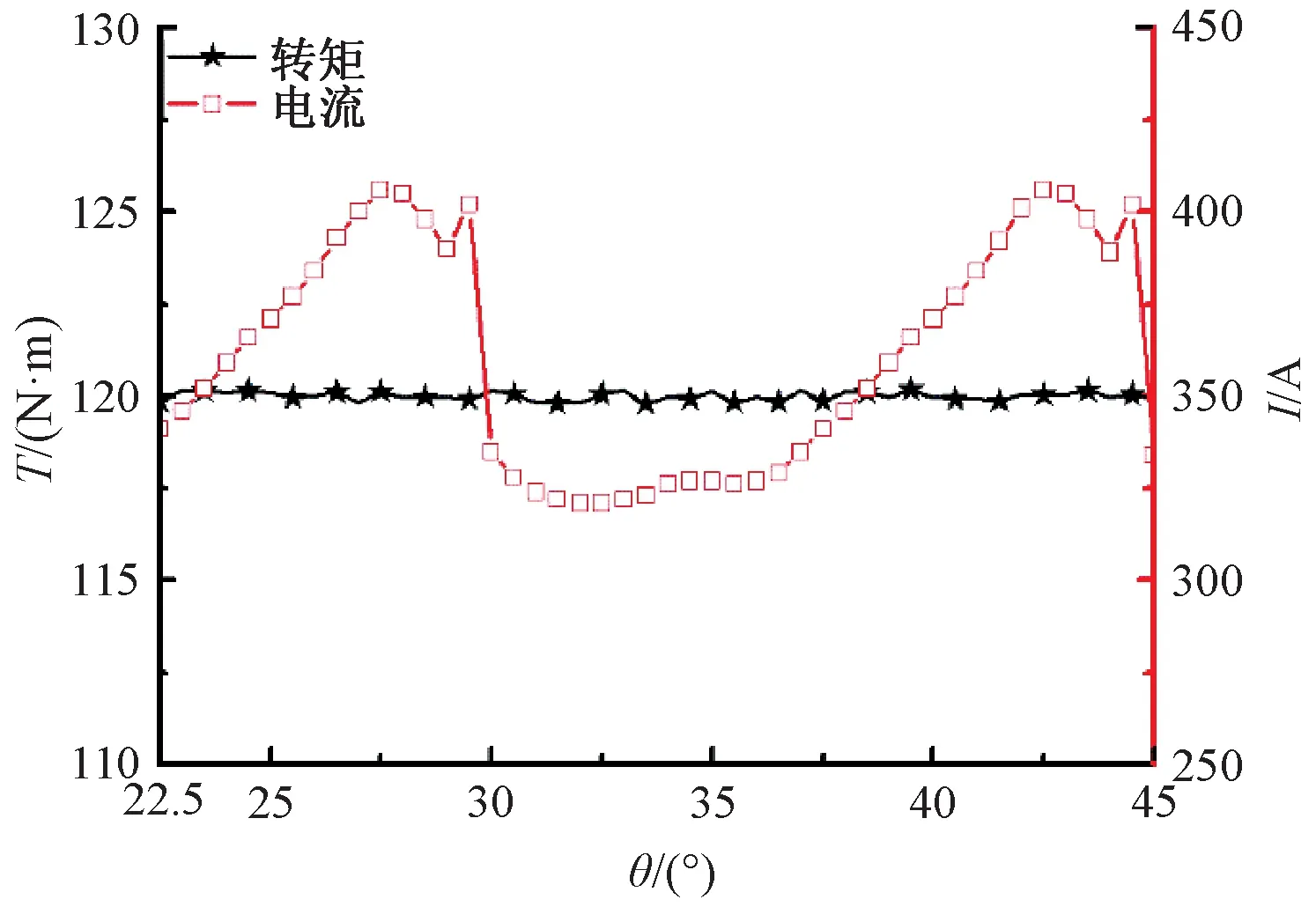
圖5 輸出轉矩與斬波電流
2.4 效率/功率map
開關磁阻電機由高壓鋰電池供電,采用通用的不對稱半橋式功率變換器驅動。為了確定電機在所有工況下的綜合性能,本文采用基于電機轉速變開通角、關斷角的思想,利用Maxwell仿真并提取了開關磁阻電機效率/功率map圖,如圖6所示。從圖6(a)可以看出,電機恒轉矩125 N·m,恒轉矩區間為轉速區間0~5 400 r/min,恒功率為70 kW,恒功率輸出區間為轉速區間5 400 r/min~12 500 r/min,電機外特性滿足賽車各工況的需求;從圖6(b)可以看出,電機效率超過85%占整個工作區間的95%以上,電機效率超過90%占整個工作區間的82%以上,且速度超過6 000 r/min、功率在50 kW以上時,其效率超過95%。從圖6可以看出,高速開關磁阻電機能夠滿足恒轉矩、恒功率輸出要求,并且相比于永磁同步電機,高速條件下開關磁阻電機不需要弱磁調速,其具有更高的效率優勢。
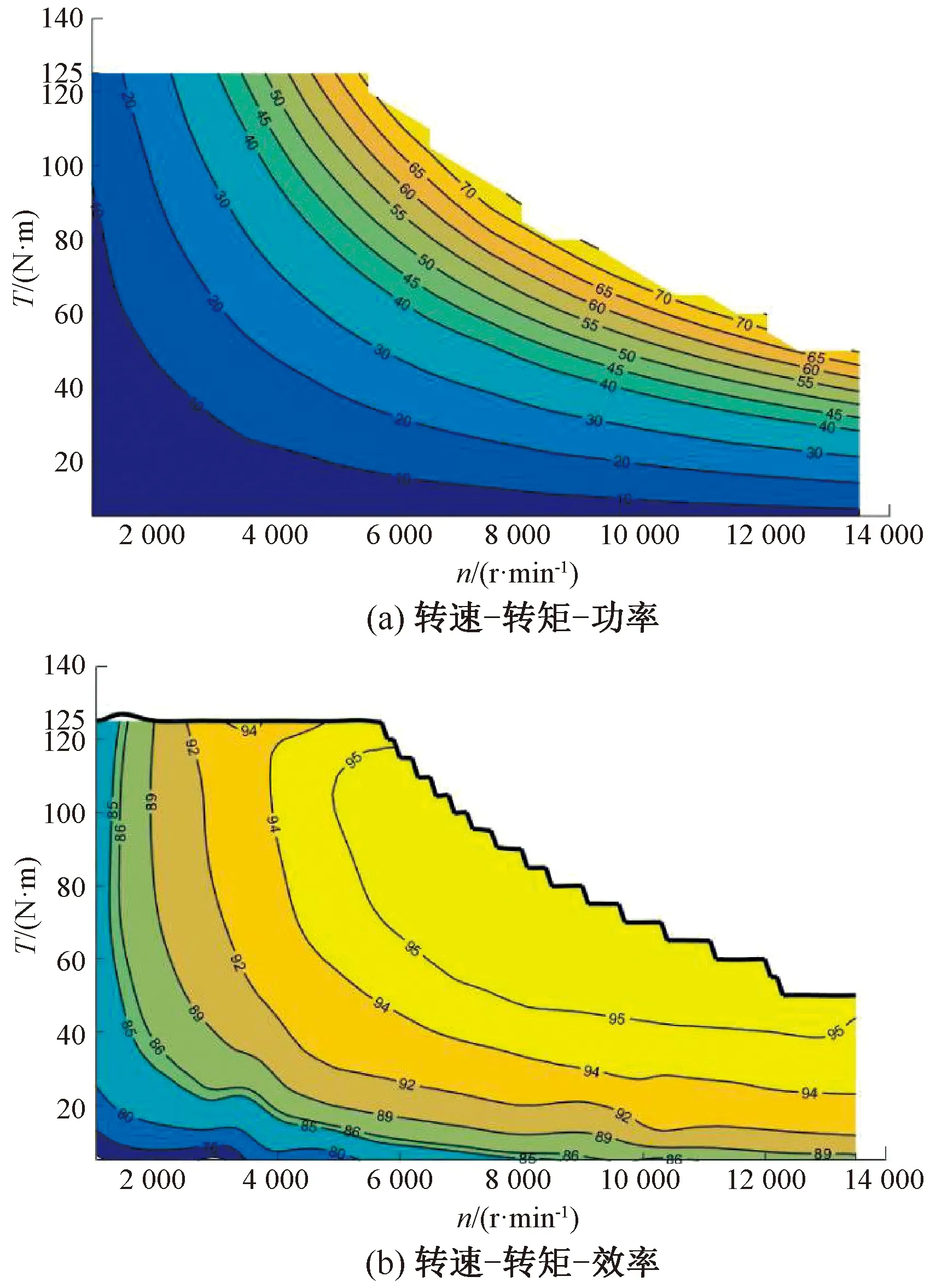
圖6 開關磁阻電機性能map
3 實驗驗證
為測試高速開關磁阻電機性能,搭建了開關磁阻電機實驗平臺,如圖7所示。控制器由TI公司TMS320F28335 DSP實現,負載電機為75 kW異步電機,扭矩傳感器量程為300 N·m。實驗中,通過測試電機輸出轉矩以及電源柜輸出的功率,計算電機系統效率。在整個電動賽車運行工況中,體現賽車性能和節能水平的是電動賽車經常運行區間,經過評估,此區間對應的驅動電機轉速區間為5 000~7 000 r/min、輸出功率30~60 kW。為評估開關磁阻驅動電機性能,本文對其中具有代表性的工作點進行了測試。圖8為輸出轉矩100 N·m時的電流波形,由于輸出峰值轉矩時轉矩脈動較大,若要輸出恒定的轉矩,要以一個周期內最小轉矩為輸出目標。圖9為額定工況下,轉速5 400 r/imn,輸出功率35 kW工況下的電流波形。受拖動臺最大吸收功率限制,此實驗僅進行了80%峰值功率工況的測試。圖10為轉速6 500 r/min,輸出功率57 kW(80%峰值功率)工況下的電流波形,此時電流已進入單波狀態,電機效率達到95%。
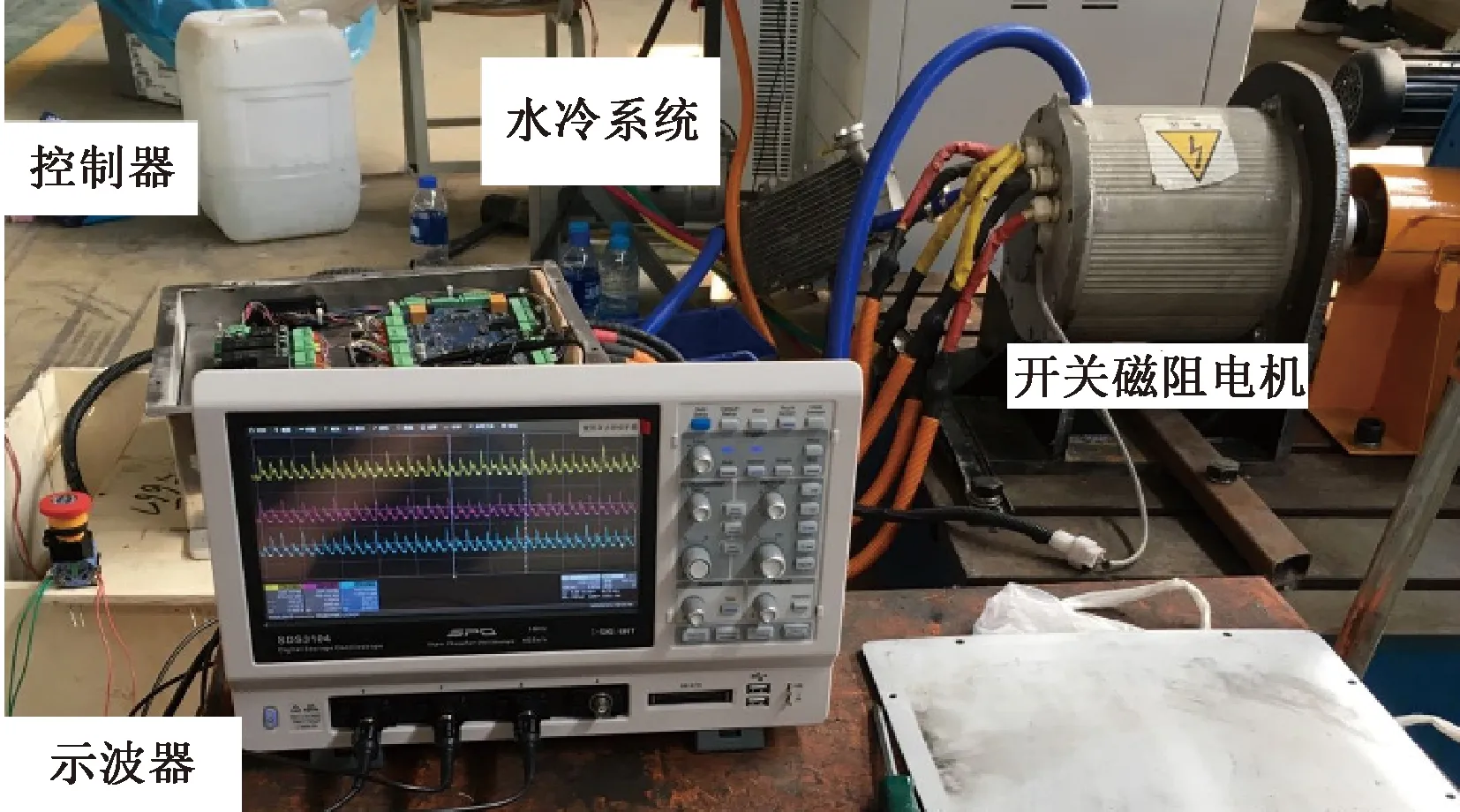
圖7 電機測試平臺
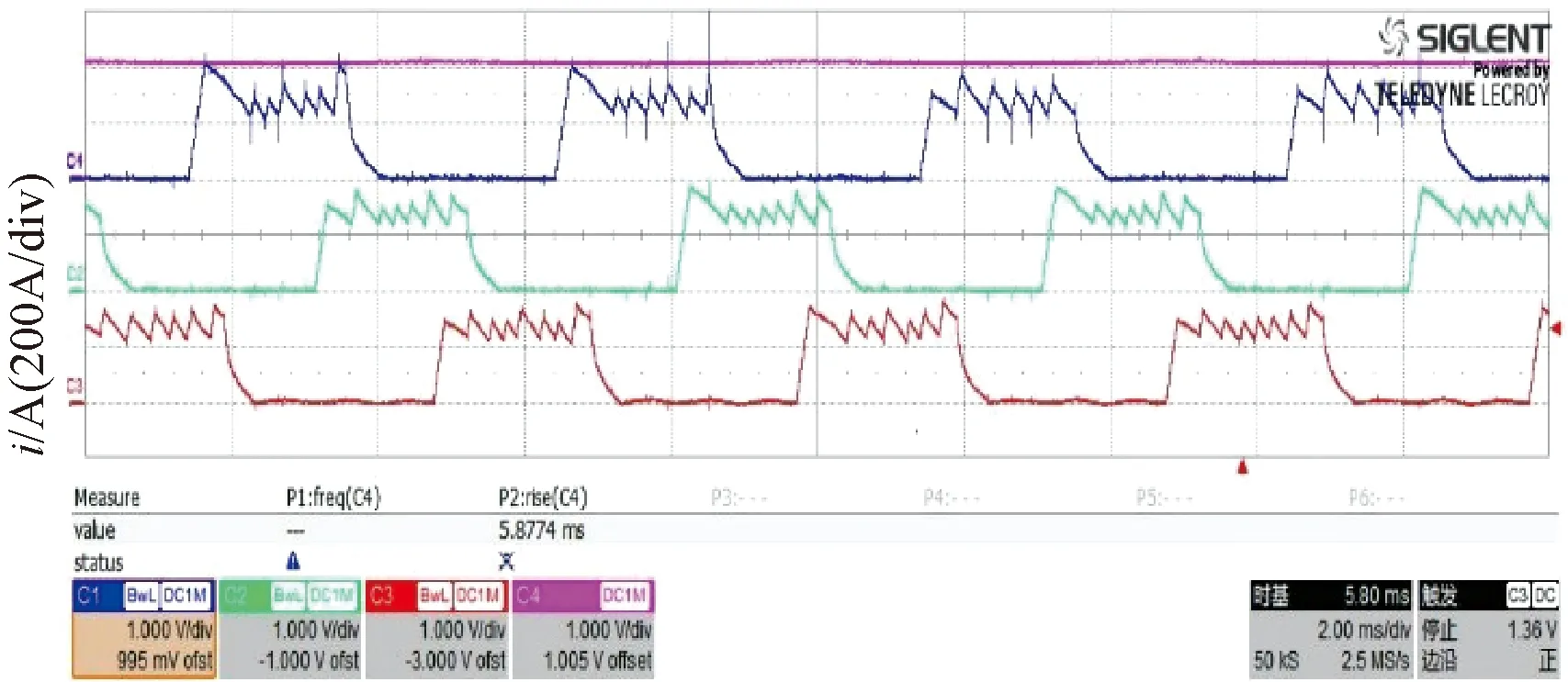
圖8 電流波形(轉速1 500 r/min)
圖9 電流波形(轉速5 400 r/min)
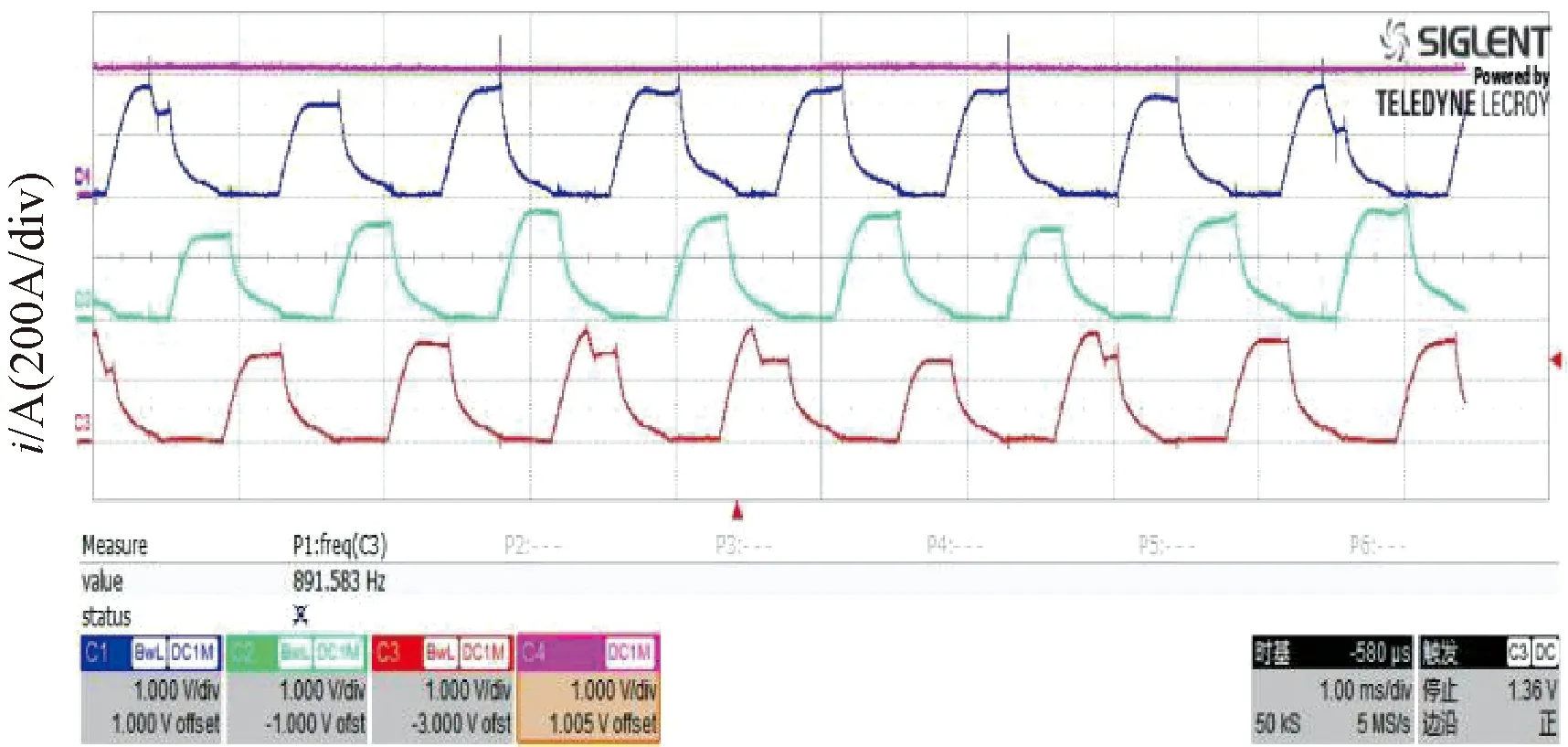
圖10 電流波形(6 500 r/min)
4 結 語
根據賽車的不同工況本文計算了賽車電機的性能需求,并根據需求設計了一款高速開關磁阻電機。針對電動賽車最大加速度時要求最大轉矩恒定,本文采用變斬波電流的方法,實現了轉矩的恒定輸出,但此時只能以轉矩波形中的最小值作為恒定輸出轉矩,故在此之前采用遺傳算法對轉矩波形的最小值進行了優化設計。在全速度范圍,本文通過仿真提取了開關磁阻電機的功率map圖和效率map圖,這為整車性能仿真提供了充足的電機特性數據,最后通過實驗驗證了高速開關磁阻電機的性能,能夠滿足全電動賽車對電機的動力需求,說明高速開關磁阻電機是全電動賽車動力系統的優秀選擇之一。
